基于HAL库的stm32的can收发实验
十六、CAN
-
1.CAN简介
CAN协议,全称为Controller Area Network(控制器局域网络),是一种广泛应用的串行通信协议,最初由 德国BOSCH公司开发,并已成为国际标准。 低速CAN(ISO11519)通信速率 10~125Kbps,总线长度可达 1000 米。 高速CAN(ISO11898)通信速率 125Kbps~1Mbps,总线长度 ≤40 米。
定义:CAN协议是一种基于差分信号的异步串行通信协议,采用双绞线作为传输介质,具有高性能、高 可靠性和独特的设计特点
特点:
多主控制:支持多主方式,即任何一个节点都可以在总线上发送数据,其他节点根据需要进行接 收。当两个以上的节点同时开始发送数据时,会根据标识符(ID)决定优先级。
系统柔软性:与总线相连的单元没有类似于“地址”的信息,因此在总线上增加单元时,连接在总线 上的其他单元的软硬件及应用层都不需要改变。
仲裁检测
通信速度快、距离远:数据传输速率较高,标准速率为125kbps,扩展速率可达1Mbps,且通信 距离远,最远可达10KM(速率低于5Kbps)。
错误检测与恢复:具有错误检测、错误通知和错误恢复功能,能够确保数据传输的可靠性。
故障封闭功能:能够判断出错误的类型,并将引起故障的单元从总线上隔离出去。
应用领域汽车 ECU之间通讯,工业自动化,航空航天
2. CAN物理层介绍
CAN网络通常由CAN控制器、CAN收发器和双绞线组成。
CAN控制器:负责处理数据的收发和协议转换。
CAN收发器:负责将控制器的数字信号转换为差分信号进行传输,同时也负责将总线上的差分信号转换 为数字信号供控制器处理。
终端电阻: 在高速CAN总线的两端分别连接一个电阻,称为终端电阻。终端电阻的主要作用是匹配总线阻抗,提高 信号质量,减少回波反射。一般来说,终端电阻的阻值为120Ω。
2.1 总线拓扑图


2.2 电平标准
CAN使用差分信号进行数据传输,根据CAN_H和CAN_L上的电位差来判断总线电平。
显性电平表示逻辑 0 ,通常 CAN_H 和 CAN_L 有 2V 的压差;
隐性电平表示逻辑 1 ,通常 CAN_H 和 CAN_L 有 0V 的压差。
显性电平在通信中具有优先权,能够覆盖隐性电平,确保数据的正确传输。
隐性电平则作为总线的空闲或监听状态存在,等待有节点发送数据。

正常情况下是隐性电平---显隐压差不同
2.3 CAN控制器与收发器


不用交叉接线
3、CAN协议层介绍
3.1 CAN帧种类介绍
1. 数据帧(Data Frame):数据帧是CAN总线上用于传输用户数据的帧,包括必要的帧头、标识符、控 制位、数据长度代码、数据域、CRC校验码和应答域等部分,是CAN通信中最基本和最重要的帧类型。
2. 遥控帧(Remote Frame):遥控帧用于向总线上的其他节点请求发送具有相同标识符的数据帧,它 没有数据域,仅通过标识符来指定所需的数据。遥控帧的帧结构与数据帧相似,但缺少数据部分。
裁判
3. 错误帧(Error Frame):当CAN总线上的任何节点检测到通信错误时,会发送错误帧来通知其他节 点。错误帧包含错误标志和错误界定符,用于指示错误的存在和类型。
4. 过载帧(Overload Frame):过载帧用于在连续的数据帧或远程帧之间提供额外的延时,以指示接收 节点尚未准备好接收下一个帧。当接收节点因内部条件限制而无法立即接收数据时,会发送过载帧来请 求发送节点暂停发送。
5. 帧间隔(Interframe Space):帧间隔用于隔离数据帧与前面的帧,确保它们之间的时间间隔足够 长,以避免总线上的冲突和数据丢失。帧间隔包括连续三个隐性位(间隔段)和可能存在的空闲段,用于将数据帧或远程帧与前面的帧分隔开来。
3.2 CAN数据帧介绍
数据帧由7段组成。数据帧又分为标准帧(CAN2.0A)和扩展帧(CAN2.0B),主要体现在仲裁段和控制段。
- 帧起始(Frame Start): 功能:表示数据帧的开始。 特点:由一个显性位(Dominant Bit)构成,此时CAN_H为高电平(如3.5V),CAN_L为低电平 (如1.5V),二者之间的电位差形成信号。 2. 仲裁段(Arbitration Field): 功能:确定发送优先级,并包含标识符(Identifier)用于唯一标识发送者和接收者之间的通信关 系。 组成: 标准数据帧的仲裁场由11位ID和1位RTR位(远程发送请求位)组成。RTR位用于区分数据帧 (显性电平)和遥控帧(隐性电平)。 扩展数据帧中,还包含SRR位(Substituted Remote Request,替代的远程请求)和IDE位 (Identifier Extension,标识符扩展)。SRR位用于指示发送方是否发送了远程请求帧,IDE 位用于指示标识符字段是否使用了扩展格式(29位)。 3. 控制段(Control Field): 功能:包含数据长度代码(DLC),用于定义数据帧中数据域的长度。 特点:DLC占4位,其取值范围为0到8个字节,表示数据帧中包含的数据字节数。 4. 数据段(Data Field): 功能:包含要传输的数据,是数据帧的主体部分。 特点:数据域的长度可以根据DLC字段的值从0到8个字节不等,数据从最高位(MSB)开始传 输。 5. CRC段(CRC Field): 功能:用于检测数据帧的传输错误。 特点:CRC(循环冗余校验)是一种通过对数据进行计算生成的校验码,发送方在发送数据帧时会 根据数据计算出CRC值,并将其添加到数据帧的CRC段中。接收方在接收到数据帧后会重新计算 CRC值,并与接收到的CRC值进行比较,以确认数据在传输过程中是否发生错误。 6. 应答段(ACK Field): 功能:用来确认数据帧的正常接收。 组成:由ACK槽(ACK Slot)和ACK界定符两个位构成。当接收节点成功解析了数据帧并确认无误 后,会在ACK槽中发送一个显性位作为应答信号。 7. 帧结束(Frame End): 功能:表示数据帧的结束。 特点:由7个连续的隐性位构成,标志着数据帧的传输完成。
-

3.3 CAN位时序
CAN总线以“位同步”机制,实现对电平的正确采样。位数据都由四段组成:同步段(SS)、传播时间段(PTS)、 相位缓冲段1(PBS1)和相位缓冲段2(PBS2),每段又由多个位时序Tq组成。

-
所谓采样点是读取总线电平,并将读到的电平作为位值的点。位置在 PBS1 结束处。

CAN总线通过时钟同步机制来确保各个节点在通信过程中保持同步。时钟同步机制包括硬同步和再同步两 种:
1.硬同步:
硬同步只在帧的起始位(SOF)处进行。
当接收节点检测到帧起始位的下降沿时,会将其与自身的位时间进行对齐,从而实现同步。

2.再同步:
再同步在帧的后续数据位中进行。
如果接收节点检测到数据位的跳变沿不在自身的同步段内,则会通过延长或缩短相位缓冲段的时 间来调整自身的位时间,以重新获得同步。
再同步时,PBS1和PBS2中增加或者减少的时间被称为“再同步补偿宽度(SJW)”,其范围:1~4 Tq。

3.4 CAN仲裁机制
CAN总线处于空闲状态,最先开始发送消息的单元获得发送权。
多个单元同时开始发送时,从仲裁段(报文ID)的第一位开始进行仲裁。仲裁原理如下:
1.标识符优先级:
CAN总线中传输的数据帧的起始部分为数据的标识符(ID)。这个标识符不仅用于区分消息,还 表示消息的优先级。在CAN 2.0标准中,标识符可以是11位或29位(对于扩展帧)。标识符的数 值越小,优先级越高。
例如,在11位标识符的情况下,ID为0x000的消息具有最高优先级,而ID为0x7FF的消息具有最低 优先级。
2.逐位仲裁:
当两个或两个以上的节点同时开始传送报文时,就会产生总线访问冲突。此时,各节点会按照标 识符的位顺序逐位进行仲裁。
在仲裁过程中,每个节点都会将自己发送的电平与总线上的电平进行比较。如果电平相同,则节 点继续发送下一位;如果电平不同,则优先级低的节点停止发送,而优先级高的节点继续发送。 这种仲裁方式是非破坏性的,即优先级低的节点在仲裁过程中不会破坏总线上已经存在的数据。
3.显性电平优先
在CAN总线上,显性电平(逻辑0)的优先级高于隐性电平(逻辑1)。因此,在仲裁过程中,如 果某个节点发送的是隐性电平,但检测到总线上存在显性电平,那么该节点就会知道有更高优先 级的消息正在发送,并主动停止发送。
一旦仲裁结束,优先级最高的节点将获得总线控制权并开始传输数据。其他节点则成为接收节点并监听总线 上的数据,并会自动检测总线空闲,在第一时间再次尝试发送。

4.STM32 CAN控制器介绍
4.1CAN控制器介绍
STM32的bxCAN,即基本扩展CAN(Basic Extend CAN),是STM32微控制器系列中集成的CAN控制器模 块。
1. 协议支持:支持CAN协议2.0A和2.0B的主动模式。
2. 高波特率:波特率最高可达1兆位/秒。
3. 时间触发通信:支持时间触发通信功能,CAN的硬件内部定时器可以在TX/RX的帧起始位的采样点位置 生成时间戳。
4. 发送功能:
具有3个发送邮箱,发送报文的优先级特性可软件配置。
记录发送SOF(Start Of Frame,帧起始)时刻的时间。
接收功能: 具有3级深度的2个FIFO(First In First Out,先进先出队列),每个FIFO都可以存放3个完整的报 文,完全由硬件管理。
共有14个位宽可变的过滤器组(部分STM32型号可能支持更多),由整个CAN共享,用于筛选有 效报文。
记录接收SOF时刻的时间。
支持禁止自动重传模式。
4.2CAN控制器模式
CAN控制器的工作模式有三种:初始化模式、正常模式和睡眠模式。
睡眠模式:在睡眠模式下,CAN控制器的时钟停止,以降低功耗。但软件仍然可以访问邮箱寄存器。
初始化模式:在初始化模式下,禁止报文的接收和发送,并且CANTX引脚输出隐性位(高电平)。此时,可 以对CAN控制器的相关寄存器进行配置,如位时间特性(CAN_BTR)和控制(CAN_MCR)等。
正常模式:作为总线的正常节点,可以向总线发送或接收数据。

CAN控制器的测试模式有三种:静默模式、环回模式和环回静默模式,主要用于特定的测试或调试目的,以 确保CAN控制器的功能正常。
静默模式
特点: 在静默模式下,CAN控制器可以正常地接收数据帧和远程帧,但只能发出隐性位,而不能真正发送报 文。
这意味着,虽然CAN控制器在尝试发送数据,但实际上它并没有在CAN总线上产生任何显性位,因此不 会对总线上的其他节点产生影响。
应用场景: 静默模式通常用于分析CAN总线的活动,而不会对总线上的其他通信造成干扰。
开发人员可以使用此模式来观察总线上的数据流,而无需担心他们的测试设备会发送出不必要的报文。
环回模式
特点:
在环回模式下,CAN控制器会把发送的报文当作接收的报文并保存(如果可以通过接收过滤)。
这意味着,当CAN控制器发送一个报文时,它会立即在自己的接收缓冲区中看到这个报文,就像它是从 总线上接收到的一样。
应用场景:
环回模式通常用于自测试,以验证CAN控制器的发送和接收功能是否正常。
通过发送一个报文并检查它是否被正确接收,开发人员可以确保CAN控制器的硬件
和固件都按预期工 作。
环回静默模式
特点:
环回静默模式结合了静默模式和环回模式的特点。
在该模式下,CANRX引脚与CAN总线断开,同时CANTX引脚被驱动到隐性位状态。
这意味着,虽然CAN控制器在尝试发送报文,但它实际上并没有在CAN总线上产生任何显性位,并且它 会将发送的报文视为接收到的报文。
应用场景:
环回静默模式通常用于“热自测试”,即可以在不影响CANTX和CANRX所连接的整个CAN系统的情况下进 行测试。
这种模式允许开发人员在不干扰总线上的其他通信的情况下,验证CAN控制器的发送和接收功能。

4.2 CAN控制器框图
CAN控制内核:包含各种控制/状态/配置寄存器,用于配置CAN控制器的模式、波特率等参数。 发送邮箱(Transmit Mailbox):用来缓存待发送的CAN报文。STM32等微控制器通常具有多个发送
发送邮箱(Transmit Mailbox):用来缓存待发送的CAN报文。STM32等微控制器通常具有多个发送邮箱 (如3个),以支持同时缓存多个报文。
接收FIFO(First In First Out):缓存接收到的有效CAN报文。CAN控制器通常具有多个接收FIFO(如2 个),以提高接收效率。
接收过滤器(Receive Filter):筛选接收到的CAN报文,只将符合特定条件的报文保存到接收FIFO中。这 有助于减少CPU的处理负担,提高系统的响应速度。


 接收处理过程:
接收处理过程:

有效报文指的是(数据帧直到EOF段的最后一位都没有错误),且通过过滤器组对
标识符过滤。
接收过滤器:
当总线上报文数据量很大时,总线上的设备会频繁获取报文,占用CPU。过滤器的存在,选择性接收有效报 文,减轻系统负担。
STM32的CAN控制器支持配置过滤器组, 每个过滤器组包含2个32位的寄存器CAN_FxR1和CAN_FxR2, 用于 存储要筛选的ID或掩码。 对于STM32F103C8T6, 如果只有一个CAN控制器, 则可以配置14个过滤器组, 对 应的编号为0到13。
过滤器可以配置为不同的位宽,以适应不同长度的CAN ID。常见的位宽包括16位(用于标准帧)和32位 (用于扩展帧)。
选择模式可设置屏蔽位模式或标识符列表模式,寄存器内容的功能就有所区别。屏蔽位模式,可以选择出一 组符合条件的报文。寄存器内容功能相当于是否符合条件。标识符列表模式,可以选择出几个特定ID的报 文。寄存器内容功能就是标识符本
身。



4.3 CAN控制器位时序

 设TS1=8、TS2=7、BRP=3,波特率 = 36000 / [( 9 + 8 + 1 ) * 4] = 500Kbps。 注意:通信双方波特率需要一致才能通信成功。
设TS1=8、TS2=7、BRP=3,波特率 = 36000 / [( 9 + 8 + 1 ) * 4] = 500Kbps。 注意:通信双方波特率需要一致才能通信成功。
CAN寄存器及库函数介绍
22.9.2 CAN控制和状态寄存器
 CAN发送状态寄存器 (CAN_TSR)
CAN发送状态寄存器 (CAN_TSR)
 CAN位时序寄存器 (CAN_BTR)
CAN位时序寄存器 (CAN_BTR)

 发送邮箱标识符寄存器 (CAN_TIxR) (x=0..2)
发送邮箱标识符寄存器 (CAN_TIxR) (x=0..2)

 发送邮箱数据长度和时间戳寄存器 (CAN_TDTxR) (x=0..2)
发送邮箱数据长度和时间戳寄存器 (CAN_TDTxR) (x=0..2)
位3:0 DLC[15:0]: 发送数据长度 (Data length code) 该域指定了数据报文的数据长度或者远程帧请求的数据长度。1个报文包含0到8个字节数据, 而这由DLC决定。
发送邮箱低字节数据寄存器 (CAN_TDLxR) (x=0..2)64位8字节 保存低字节
 发送邮箱高字节数据寄存器 (CAN_TDHxR) (x=0..2)
发送邮箱高字节数据寄存器 (CAN_TDHxR) (x=0..2)
 22.9.4 CAN过滤器寄存器
22.9.4 CAN过滤器寄存器
 CAN 过滤器模式寄存器 (CAN_FM1R)
CAN 过滤器模式寄存器 (CAN_FM1R)
 CAN 过滤器位宽寄存器 (CAN_FS1R)
CAN 过滤器位宽寄存器 (CAN_FS1R)
 CAN 过滤器FIFO关联寄存器 (CAN_FFA1R)
CAN 过滤器FIFO关联寄存器 (CAN_FFA1R)

 CAN 过滤器组i的寄存器x (CAN_FiRx)
CAN 过滤器组i的寄存器x (CAN_FiRx)
(互联产品中i=0..27,其它产品中i=0..13; x=1..2)

根据过滤器位宽和模式的不同设置,过滤器组中的两个寄存器的功能也不尽相同。关于过滤器 的映射,功能描述和屏蔽寄存器的关联,请参见22.7.4节标识符过滤。
函数
HAL_CAN_Init
HAL_CAN_ConfigFilter
HAL_CAN_Start 收发数据
HAL_CAN_AddTxMessage
HAL_CAN_GetRxMessage
HAL_CAN_GetTxMailboxesFreeLevel 等待发送完成
HAL_CAN_GetRxFifoFillLevel 等待接收完成
TimeSeg1
 流程图
流程图

小实验:CAN收发实验
实验目的
1. 使用回环模式实现自发自收;
2两个CAN设备实现收发。
硬件清单 TJA1050
为什么只能
 为什么只能发数据却收不到数据
为什么只能发数据却收不到数据


 用NORMAL的时候就发给另一台设备
用NORMAL的时候就发给另一台设备
/------------------------------------can.c-----------------------------------/
初始化
void can_init(void)
{can_handle.Instance = CAN1;//外设基地址//波特率,位时序can_handle.Init.Mode = CAN_MODE_LOOPBACK;//回环模式自己发自己收用作测试//波特率can_handle.Init.Prescaler = 4; //波特率预分频can_handle.Init.TimeSeg1 = CAN_BS1_9TQ;//tq取8但是这里取9个TQ为什么?can_handle.Init.TimeSeg2 = CAN_BS1_8TQ;//tq取8但是这里取9个TQcan_handle.Init.SyncJumpWidth = CAN_SJW_1TQ;//1~4个Tqcan_handle.Init.AutoBusOff = DISABLE; //禁止自动离线管理can_handle.Init.AutoRetransmission = DISABLE; //禁止自动重发can_handle.Init.AutoWakeUp = DISABLE; //禁止自动唤醒can_handle.Init.ReceiveFifoLocked = DISABLE; //禁止接收FIFO锁定can_handle.Init.TimeTriggeredMode = DISABLE; //禁止时间触发通信模式can_handle.Init.TransmitFifoPriority = DISABLE; //禁止发送FIFO优先级HAL_CAN_Init(&can_handle);//过滤器配置CAN_FilterTypeDef can_filterconfig = {0};//结构体can_filterconfig.FilterMode = CAN_FILTERMODE_IDMASK; //工作模式按摩 掩码。和列表模式can_filterconfig.FilterScale = CAN_FILTERSCALE_32BIT;//拓展帧32位can_filterconfig.FilterIdHigh = 0;//不过滤任何东西什么东西来都接收can_filterconfig.FilterIdLow = 0;can_filterconfig.FilterMaskIdHigh = 0;can_filterconfig.FilterMaskIdLow = 0;can_filterconfig.FilterBank = 0;//使用0号寄存器can_filterconfig.FilterFIFOAssignment = CAN_FilterFIFO0;//进到FIFO 0中can_filterconfig.FilterActivation = CAN_FILTER_ENABLE;//使能过滤器can_filterconfig.SlaveStartFilterBank = 14;//---HAL_CAN_ConfigFilter(&can_handle,&can_filterconfig);HAL_CAN_Start(&can_handle);
}
底层配置
void HAL_CAN_MspInit(CAN_HandleTypeDef *hcan)
{__HAL_RCC_CAN1_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();GPIO_InitTypeDef gpio_initstruct;gpio_initstruct.Pin = GPIO_PIN_12; gpio_initstruct.Mode = GPIO_MODE_AF_PP; gpio_initstruct.Pull = GPIO_PULLUP; gpio_initstruct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(GPIOA, &gpio_initstruct);gpio_initstruct.Pin = GPIO_PIN_11; gpio_initstruct.Mode = GPIO_MODE_AF_INPUT; HAL_GPIO_Init(GPIOA, &gpio_initstruct);
}can发送数据
void can_send_data(uint32_t id,uint8_t *buf,uint8_t len)
{CAN_TxHeaderTypeDef tx_header = {0};uint32_t tx_mail = CAN_TX_MAILBOX0;//邮箱0tx_header.ExtId = id;tx_header.DLC = len;tx_header.IDE = CAN_ID_EXT;//标准针还是拓展帧tx_header.RTR = CAN_RTR_DATA;//数据帧HAL_CAN_AddTxMessage(&can_handle,&tx_header,buf,&tx_mail);//句柄 结构体 指定邮箱//等待三个邮箱都空while(HAL_CAN_GetTxMailboxesFreeLevel(&can_handle) != 3);uint8_t i =0;printf("发送数据: \r\n");//将buf中的数字打印出来for(i = 0;i <len;i++)printf("%X ",buf[i]);printf("\r\n");
}接收数据
uint8_t can_receive_data(uint8_t *buf)
{CAN_RxHeaderTypeDef rx_header = {0};if(HAL_CAN_GetRxFifoFillLevel(&can_handle,CAN_RX_FIFO0) == 0)return 0;//没有接收到数据//句柄 FIFO0,机构体,缓冲区HAL_CAN_GetRxMessage(&can_handle,CAN_RX_FIFO0,&rx_header,buf);uint32_t i = 0;printf("接收数据: \r\n");for(i =0;i < rx_header.DLC;i++)printf("%X ", buf[i]);printf("\r\n");return rx_header.DLC;}/------------------------------------------main.c---------------------------/
#include "sys.h"
#include "delay.h"
#include "led.h"
#include "uart1.h"
#include "key.h"
#include "can.h"
#include "stdio.h"uint8_t data_send[8] = {0x11,0x22,0x33,0x44,0x55,0x66,0x77,0x88};
uint8_t data_receive[8];int main(void)
{HAL_Init(); /* 初始化HAL库 */stm32_clock_init(RCC_PLL_MUL9); /* 设置时钟, 72Mhz */led_init(); /* LED初始化 */uart1_init(115200);can_init();key_init();
// led1_on();
// led1_off();printf("hello world!\r\n");uint8_t i = 0;while(1){ //按下KEY1发送数据if(key_scan() == 1){for(i=0;i<8;i++)data_send[i]++;can_send_data(0x12345678,data_send,8);}can_receive_data(data_receive);}
}实验现象

相关文章:
基于HAL库的stm32的can收发实验
十六、CAN 1.CAN简介 CAN协议,全称为Controller Area Network(控制器局域网络),是一种广泛应用的串行通信协议,最初由 德国BOSCH公司开发,并已成为国际标准。 低速CAN(ISO11519)通…...
)
重构(二)
继续"提高代码质量" 接着上文提高代码质量, 需要从这几个特点入手 1、代码重用性。2、可读性。3、可扩展性。4、可靠性。5、高内聚,低耦合。 仅仅就"可读性"去分析一下吧, 毕竟例子实在是太多了 递归的"可读性"不如while循环 递归…...

centos7下制作DockerFile 镜像
文章目录 介绍DockerFile 常用命令示例1.创建Dockerfile文件2.构建Dockerfile镜像3.验证结果 小结 介绍 Dockerfile 是一个文本文件,包含了用于构建 Docker 镜像的所有命令和指令。它定义了镜像的构建过程,包括基础镜像、安装软件、设置环境变量、复制文…...

GFPS扩展技术原理(七)-音频切换消息流
音频切换消息流 Seeker和Provider通过消息流来同步音频切换能力,触发连接做切换,获取或设置音频切换偏好,通知连接状态等等。为此专门定义了音频切换消息流Message Group 为0x07,Message codes如下: MAC of Audio s…...

压缩qcow2镜像带来的性能损失简单分析
本文拟对压缩qcow2镜像所带来的虚拟机性能损失进行简单分析 背景 生产中发现使用压缩镜像启动的虚拟机开机总是会慢一些。 qcow2镜像的压缩方式为:qemu-img convert -p -c -O qcow2 zero_disk.qcow2 compress_disk.qcow2 分析 qemu代码:https://down…...

Kali操作系统简单介绍
Kali是一个集成了各种安全工具的操作系统 安全问题的根源 1.分层思想:网络和软件开发的分层方法 2.安全问题:分层思想导致的片面认识和系统脆弱性 3.人的因素:安全问题的最终根源是人的错误 传统安全建设 1.防护型安全建设:关闭不…...

LabVIEW物联网开发实战:专栏总述
本专栏以LabVIEW为开发平台,讲解物联网通信组网原理与开发方法,覆盖RS232、TCP、MQTT、蓝牙、Wi-Fi、NB-IoT等协议。 结合实际案例,展示如何利用LabVIEW和常用模块实现物联网系统的快速开发与原型设计,助你从基础到实战࿰…...

高效处理PDF文件的终极工具:构建一个多功能PDF转换器
在日常工作中,处理PDF文件几乎是每个人都不可避免的任务。无论是从PDF中提取数据、合并多个PDF文件,还是处理文件中的敏感信息和图像,PDF文件的处理都可能成为繁琐且耗时的工作。如果你是数据分析师、工程师,或者从事文档管理的工…...

Y3编辑器教程6:触发器进阶案例
文章目录 一、地形制作1.1 地形制作流程1.2 关卡白盒1.3 场景美化1.4 优化场景 二、触发结构三、玩家指引(函数封装)3.1 项目拆解3.2 功能实现3.2.1 绘制UI界面3.2.2 UI的读取显示和刷新3.2.3 交互功能3.2.4 最终实现 四、NPC对话系统4.1 项目拆解4.2 UI…...

react Ant Design
一、通过项目模版创建一个react项目 set NPM_CONFIG_REGISTRYhttps://registry.npmmirror.com pnpm create vite antd-demo cd antd-demo pnpm install pnpm install antd --save 打开项目: 修改:welcome.tsx import React from react; import { Butto…...
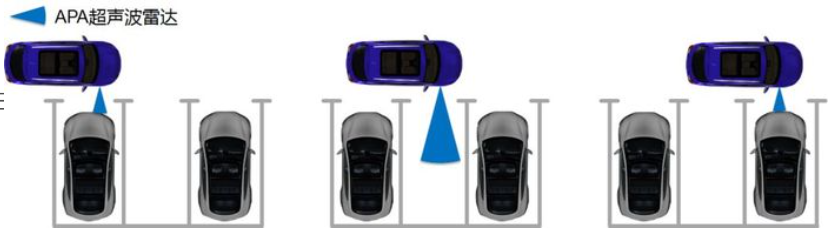
汽车电子零部件(14):APA(自动泊车辅助)/RPA(远程遥控泊车)/AVP(自动代客泊车)
APA: Automated Parking Assist (APA) systems,自动泊车辅助系统,是自动驾驶汽车的一个关键功能。自动泊车辅助系统(APA)利用超声波雷达、视觉传感器和ADAS处理器来定位合适的停车位。它识别适合车辆大小的停车位,规划停车路线,并控制方向盘、变速箱和油门踏板以辅助停…...

Hot100刷题计划-Day2-滑动窗口、双指针、数组、链表、动态规划
LeetCode Hot 100 是最常被考察的题目集合,涵盖了面试中常见的算法和数据结构问题。刷 Hot100可以让你在有限的时间内集中精力解决最常考的问题。不仅要写出代码,还要理解问题的本质、优化解法和复杂度分析。 滑动窗口 438. 找到字符串中所有字母异位词…...

[react 3种方法] 获取ant组件ref用ts如何定义?
获取ant的轮播图组件, 我用ts如何定义? Strongly Type useRef with ElementRef | Total TypeScript import React, { ElementRef } from react; const lunboRef useRef<ElementRef<typeof Carousel>>(null); <Carousel autoplay ref{lunboRef}> 这样就…...

考前倒计时98天
2024年12月21日到2025年3月29日共有 98 天 一、计算机基础 思维分类特征强调学科代表理论思维(推理思维)推理和演绎推理数学实验思维(证实思维)观察和总结自然规律归纳物理学计算思维(构造思维)设计和构造…...

iterm2 focus时灰色蒙层出现的解决办法
问题描述: 当前我的iterm2版本是3.5.10,是我最近才更新的,然后就出现以下页面显示问题,如图所示: 我个人对终端、编辑器等使用存在洁癖,尤其是页面显示效果不满意更是不能忍受,之前找了很久没有…...
)
合并K个升序链表(最优解)
题目来源 23. 合并 K 个升序链表 - 力扣(LeetCode) 题目描述 给你一个链表数组,每个链表都已经按升序排列。 请你将所有链表合并到一个升序链表中,返回合并后的链表。 示例 1: 输入:lists [[1,4,5],[1,3,…...

kubernates实战
使用k8s来部署tomcat 1、创建一个部署,并指定镜像地址 kubectl create deployment tomcat6 --imagetomcat:6.0.53-jre82、查看部署pod状态 kubectl get pods # 获取default名称空间下的pods kubectl get pods --all-namespaces # 获取所有名称空间下的pods kubect…...

How to run Flutter on an Embedded Device
basysKom GmbH | How to run Flutter on an Embedded Device https://github.com/sony/flutter-embedded-linux/wiki/Building-Flutter-Engine-from-source flutter源码下载(最新)-CSDN博客 flutter_engine 交叉编译【自定义编译器(最新)】_flutter。engine 修改-CSDN博客 …...
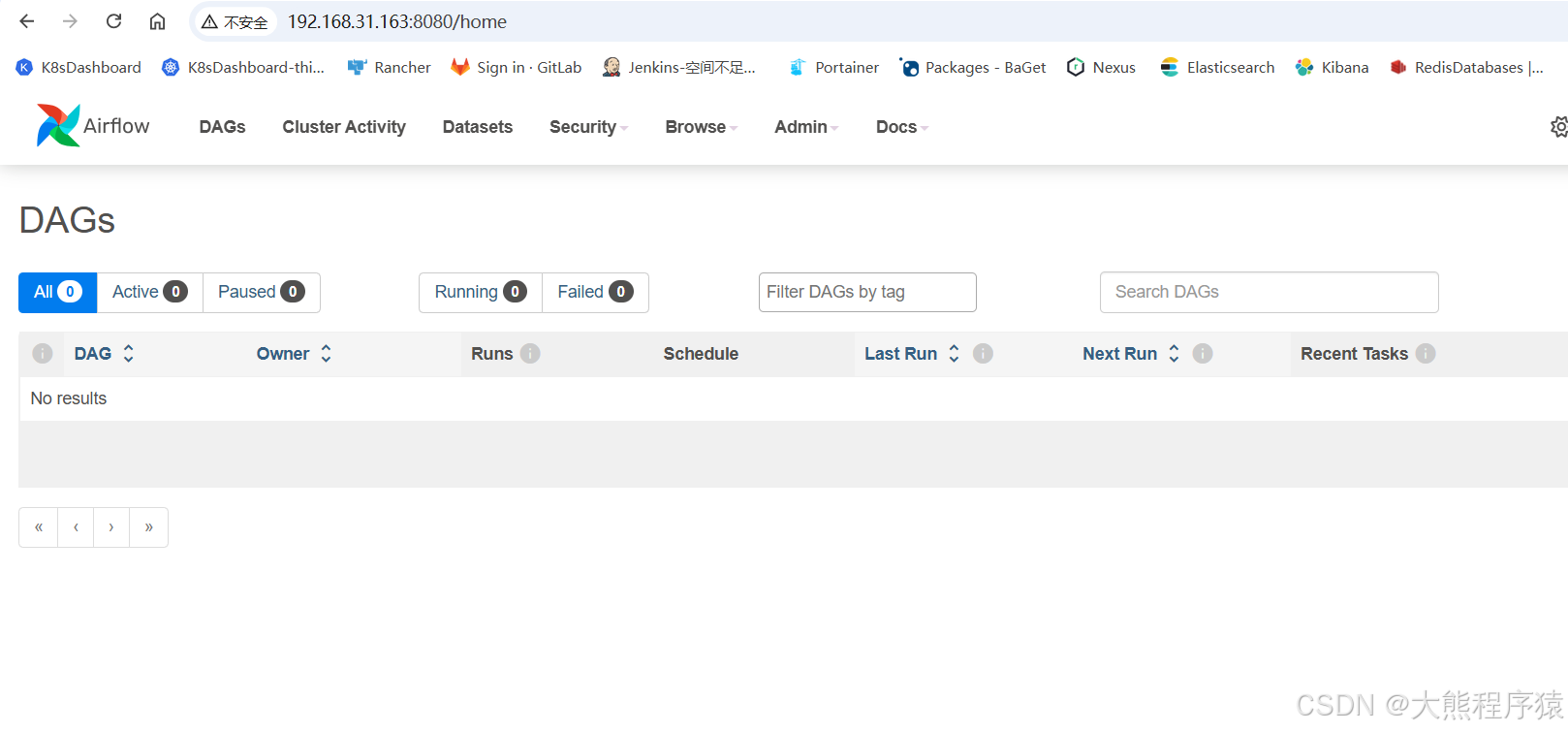
airflow docker 安装
mkdir -p /root/airflow cd /root/airflow && mkdir -p ./dags ./logs ./plugins ./configcd /root/airflow/ wget https://airflow.apache.org/docs/apache-airflow/2.10.4/docker-compose.yaml nano docker-compose.yamlAIRFLOW__CORE__LOAD_EXAMPLES: false #初始化…...
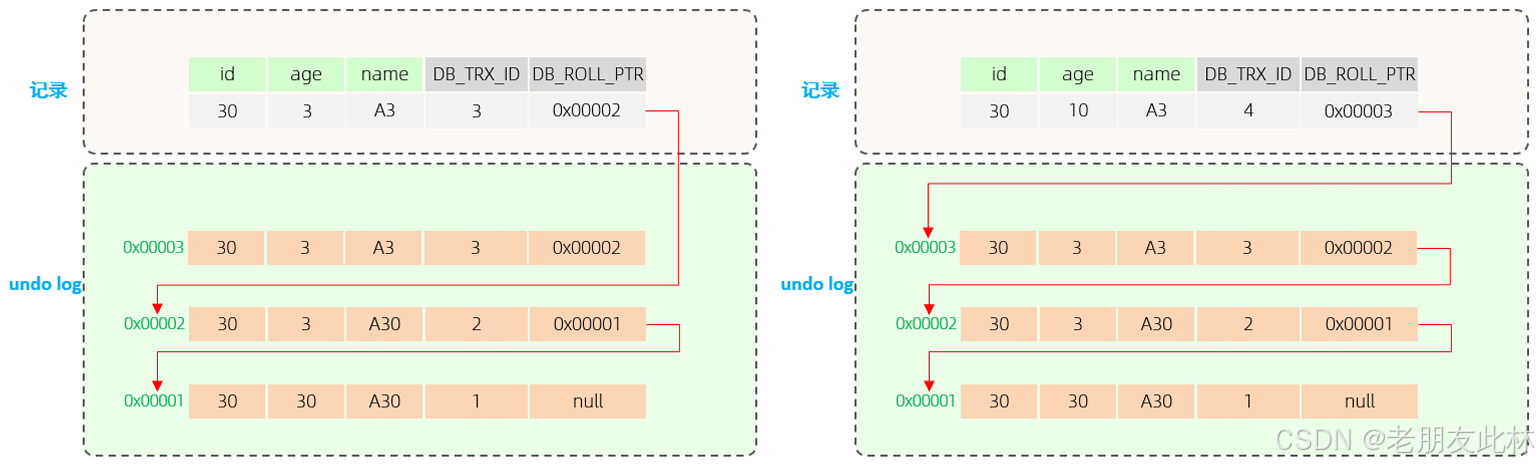
浅析InnoDB引擎架构(已完结)
大家好,我是此林。 今天来介绍下InnoDB底层架构。 1. 磁盘架构 我们所有的数据库文件都保存在 /var/lib/mysql目录下。 由于我这边是docker部署的mysql,用如下命令查看mysql数据挂载。 docker inspect mysql-master 如下图,目前只有一个数…...

AI大模型产品经理零基础到进阶学习路线图,非常详细收藏我这一篇就够了
AI产品经理区别于普通产品经理的地方,不止在懂得AI算法,更重要的是具有AI思维。 人工智能产品设计要以操作极度简单为标准,但是前端的简单代表后端的复杂,系统越复杂,才能越智能。 同样,人工智能的发展依…...

免费开源AI绘画工具推荐:Z-Image-Turbo,照片级质量,消费级显卡友好
免费开源AI绘画工具推荐:Z-Image-Turbo,照片级质量,消费级显卡友好 1. 为什么选择Z-Image-Turbo 在众多开源AI绘画工具中,Z-Image-Turbo以其独特的优势脱颖而出。作为阿里巴巴通义实验室开源的高效文生图模型,它完美…...

Spring Boot pom.xml 属性配置 <properties> 没有统一管理 lombok 依赖版本,这里可以正常使用 ${lombok.version}
问题:<!-- 属性配置,统一管理依赖版本 --><properties><project.build.sourceEncoding>UTF-8</project.build.sourceEncoding><!-- MapStruct 版本 --><org.mapstruct.version>1.6.3</org.mapstruct.version>…...
)
3月31日(AI审批+技术岗位情况+知识获取方法)
如何用 AI 分类器替代人工审批 Claude 每执行一个命令、每改一个文件,都要你点一次“同意”。用户 93% 的操作都会批准。也就是说,这个“安全审批”环节,绝大多数时候只是一个条件反射。 告警疲劳:100 条告警里只有 7 条需要关注…...

小模型大能力:DeepSeek-R1-Distill-Qwen-1.5B在边缘计算中的应用
小模型大能力:DeepSeek-R1-Distill-Qwen-1.5B在边缘计算中的应用 1. 引言:边缘计算时代的轻量级AI解决方案 在AI技术快速发展的今天,大模型已经展现出惊人的能力。然而,当我们把目光投向边缘计算场景时,传统的百亿参…...

避开Verilog数据转换的坑:ASCII码转16进制时,大小写处理你真的做对了吗?
Verilog字符转换实战:如何正确处理ASCII与十六进制的大小写问题 在数字系统设计中,数据格式转换是最基础却又最容易出错的环节之一。最近在review团队一位新成员的UART通信模块代码时,发现一个典型的"大小写陷阱"——当十六进制数据…...

新手友好:在快马平台通过生成式ai轻松上手tomcat与servlet开发
作为一个Java Web开发的新手,刚开始接触Tomcat和Servlet时确实会遇到不少困惑。记得我第一次尝试搭建环境时,光是配置Tomcat服务器就折腾了大半天,更别提理解Servlet的运行机制了。直到发现了InsCode(快马)平台,才真正找到了快速上…...

从长城杯赛题到实战:基于ZeroShell防火墙的威胁流量深度狩猎
1. 从CTF赛题到真实威胁狩猎的思维转换 第一次接触长城杯那道ZeroShell防火墙的赛题时,我还在纳闷:这种刻意设计的漏洞场景,在真实企业里真的存在吗?直到上个月帮某制造业客户做安全巡检,亲眼看到他们的ZeroShell 3.9.…...

Llama-3.2V-11B-cot与Dify集成:零代码构建企业AI智能体
Llama-3.2V-11B-cot与Dify集成:零代码构建企业AI智能体 最近和几个做企业服务的朋友聊天,大家普遍有个感觉:现在AI模型能力越来越强,但真要把它们用起来,门槛还是有点高。特别是对于业务部门的人来说,看着…...

告别C盘爆满!手把手教你配置Miniforge,让所有虚拟环境乖乖待在D盘
彻底解放C盘空间:Miniforge虚拟环境全迁移至D盘实战指南 每次打开资源管理器看到C盘飘红的存储条,心跳都会漏半拍——这大概是Windows开发者最熟悉的焦虑场景。特别是当你发现conda创建的虚拟环境正悄无声息吞噬着宝贵的系统盘空间时,那种无…...