汽车电子零部件(14):APA(自动泊车辅助)/RPA(远程遥控泊车)/AVP(自动代客泊车)
APA:
Automated Parking Assist (APA) systems,自动泊车辅助系统,是自动驾驶汽车的一个关键功能。自动泊车辅助系统(APA)利用超声波雷达、视觉传感器和ADAS处理器来定位合适的停车位。它识别适合车辆大小的停车位,规划停车路线,并控制方向盘、变速箱和油门踏板以辅助停车。APA比传统的停车辅助系统更智能,即使在狭窄的空间内,也能帮助驾驶员快速安全地停车。
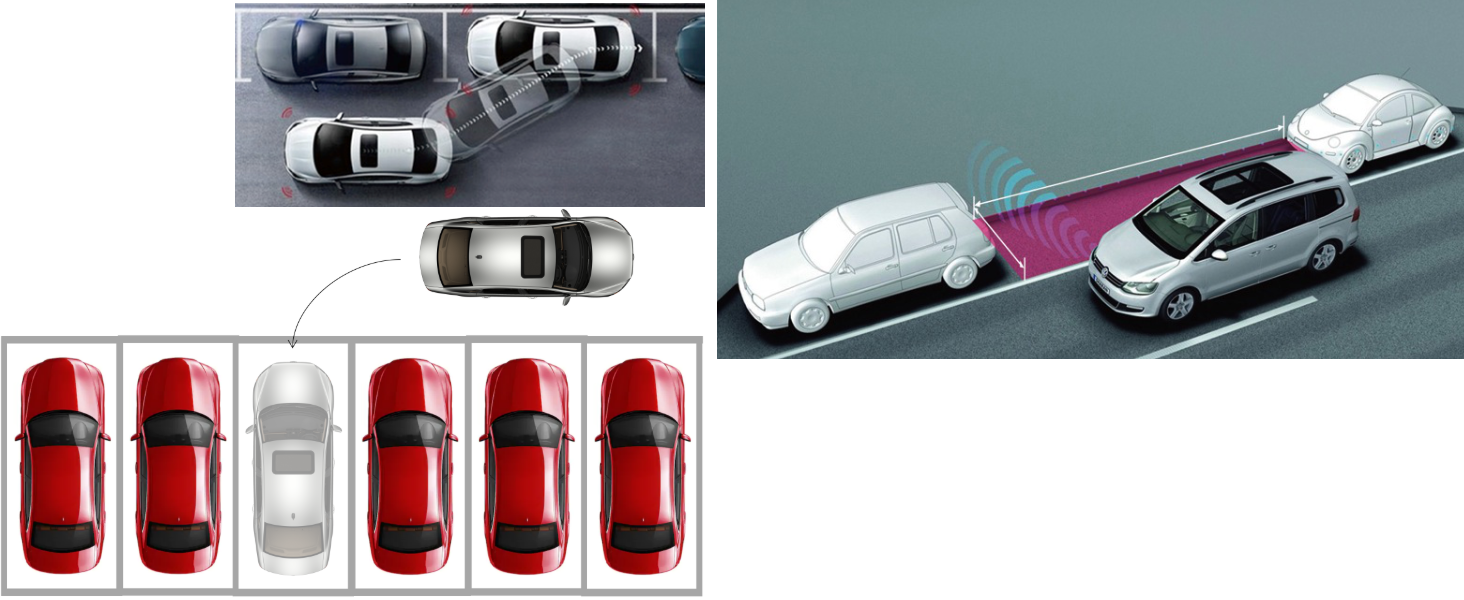
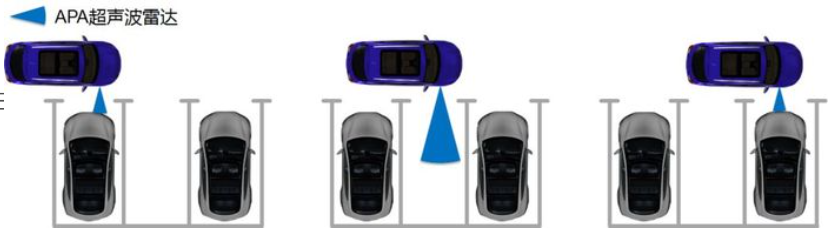
自动停车辅助系统(APA:Automatic Park Assist)使用停车辅助系统进行更深入的比较此系統由安裝于车辆周围的12个超声波传感器来作用,启用时,系统将自动扫描可停的停车位,并自动将车停放在驾驶选定的停车位上,无须驾驶操作方向盘、档位、油门和刹车,即可通过此系統完成自动停车。
水平停车:
相关文章:
汽车电子零部件(14):APA(自动泊车辅助)/RPA(远程遥控泊车)/AVP(自动代客泊车)
APA: Automated Parking Assist (APA) systems,自动泊车辅助系统,是自动驾驶汽车的一个关键功能。自动泊车辅助系统(APA)利用超声波雷达、视觉传感器和ADAS处理器来定位合适的停车位。它识别适合车辆大小的停车位,规划停车路线,并控制方向盘、变速箱和油门踏板以辅助停…...

Hot100刷题计划-Day2-滑动窗口、双指针、数组、链表、动态规划
LeetCode Hot 100 是最常被考察的题目集合,涵盖了面试中常见的算法和数据结构问题。刷 Hot100可以让你在有限的时间内集中精力解决最常考的问题。不仅要写出代码,还要理解问题的本质、优化解法和复杂度分析。 滑动窗口 438. 找到字符串中所有字母异位词…...

[react 3种方法] 获取ant组件ref用ts如何定义?
获取ant的轮播图组件, 我用ts如何定义? Strongly Type useRef with ElementRef | Total TypeScript import React, { ElementRef } from react; const lunboRef useRef<ElementRef<typeof Carousel>>(null); <Carousel autoplay ref{lunboRef}> 这样就…...

考前倒计时98天
2024年12月21日到2025年3月29日共有 98 天 一、计算机基础 思维分类特征强调学科代表理论思维(推理思维)推理和演绎推理数学实验思维(证实思维)观察和总结自然规律归纳物理学计算思维(构造思维)设计和构造…...

iterm2 focus时灰色蒙层出现的解决办法
问题描述: 当前我的iterm2版本是3.5.10,是我最近才更新的,然后就出现以下页面显示问题,如图所示: 我个人对终端、编辑器等使用存在洁癖,尤其是页面显示效果不满意更是不能忍受,之前找了很久没有…...
)
合并K个升序链表(最优解)
题目来源 23. 合并 K 个升序链表 - 力扣(LeetCode) 题目描述 给你一个链表数组,每个链表都已经按升序排列。 请你将所有链表合并到一个升序链表中,返回合并后的链表。 示例 1: 输入:lists [[1,4,5],[1,3,…...

kubernates实战
使用k8s来部署tomcat 1、创建一个部署,并指定镜像地址 kubectl create deployment tomcat6 --imagetomcat:6.0.53-jre82、查看部署pod状态 kubectl get pods # 获取default名称空间下的pods kubectl get pods --all-namespaces # 获取所有名称空间下的pods kubect…...

How to run Flutter on an Embedded Device
basysKom GmbH | How to run Flutter on an Embedded Device https://github.com/sony/flutter-embedded-linux/wiki/Building-Flutter-Engine-from-source flutter源码下载(最新)-CSDN博客 flutter_engine 交叉编译【自定义编译器(最新)】_flutter。engine 修改-CSDN博客 …...
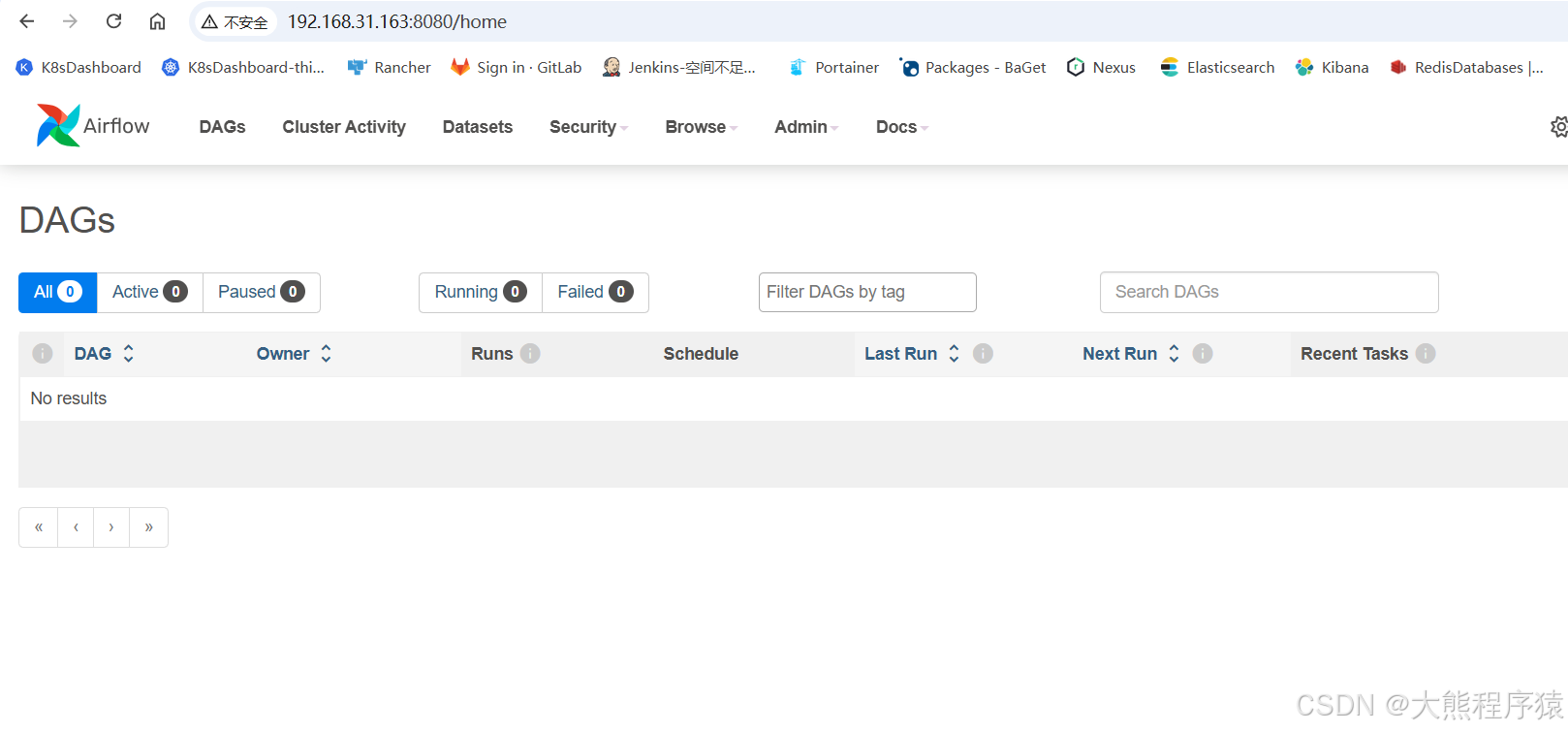
airflow docker 安装
mkdir -p /root/airflow cd /root/airflow && mkdir -p ./dags ./logs ./plugins ./configcd /root/airflow/ wget https://airflow.apache.org/docs/apache-airflow/2.10.4/docker-compose.yaml nano docker-compose.yamlAIRFLOW__CORE__LOAD_EXAMPLES: false #初始化…...
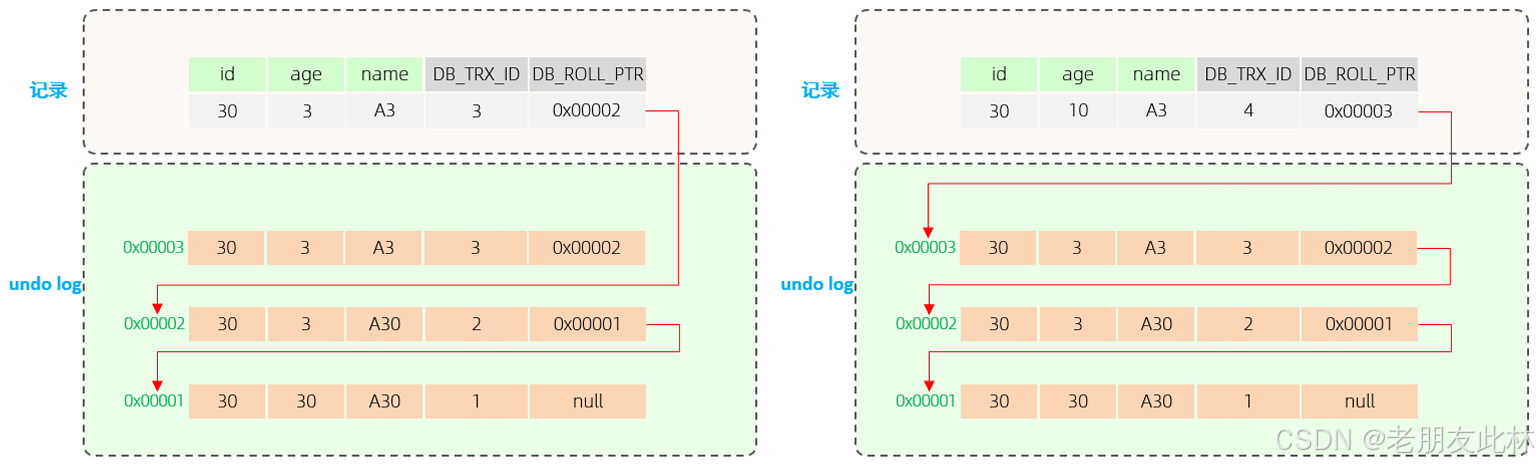
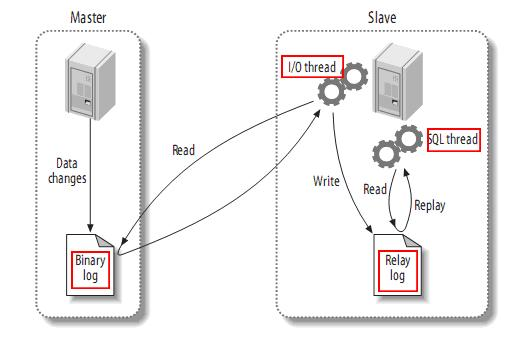
浅析InnoDB引擎架构(已完结)
大家好,我是此林。 今天来介绍下InnoDB底层架构。 1. 磁盘架构 我们所有的数据库文件都保存在 /var/lib/mysql目录下。 由于我这边是docker部署的mysql,用如下命令查看mysql数据挂载。 docker inspect mysql-master 如下图,目前只有一个数…...
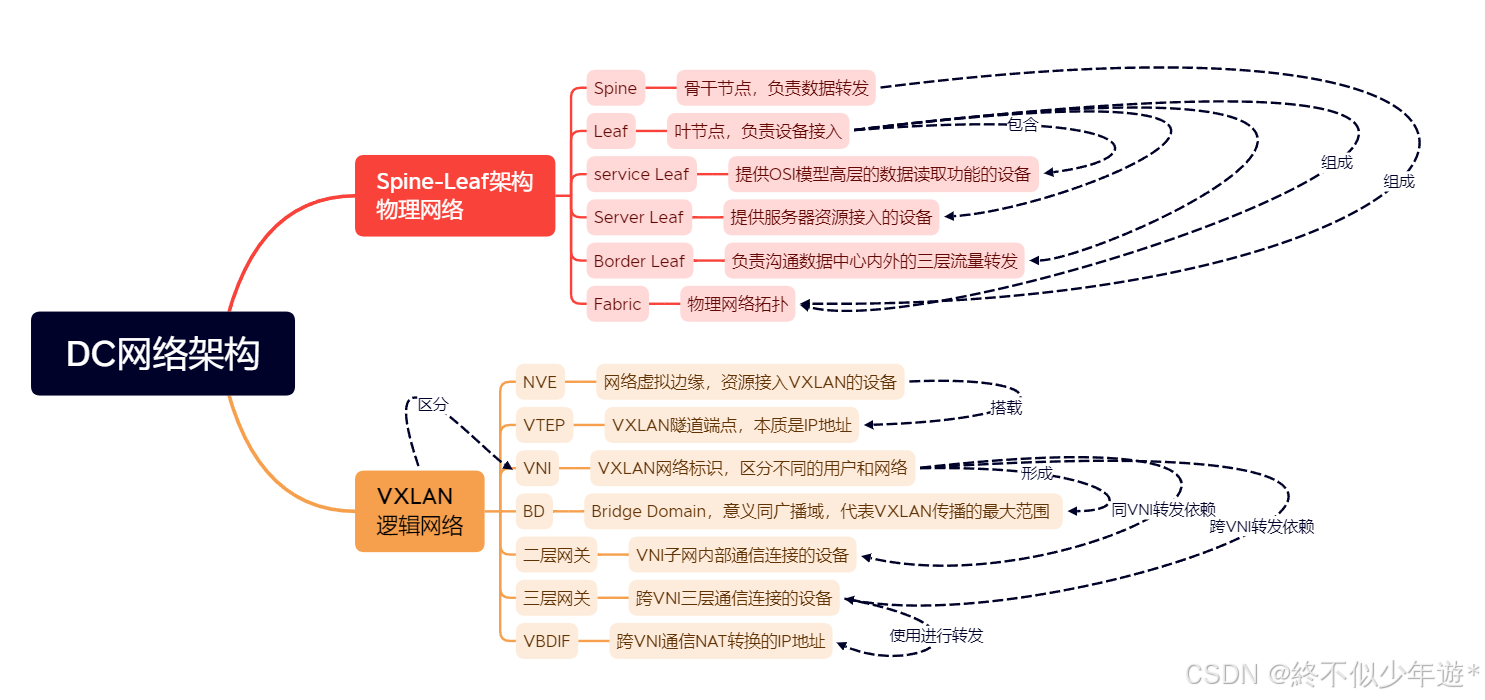
华为云计算HCIE笔记02
第二章:华为云Stack规划设计 交付总流程 准备工作:了解客户的基本现场,并且对客户的需求有基本的认知。 HLD方案BOQ报价设备采购和设备上架 2.安装部署流程 硬件架构设计 硬件设备选配 设备上架与初始化配置 准备相关资料(自动下载…...
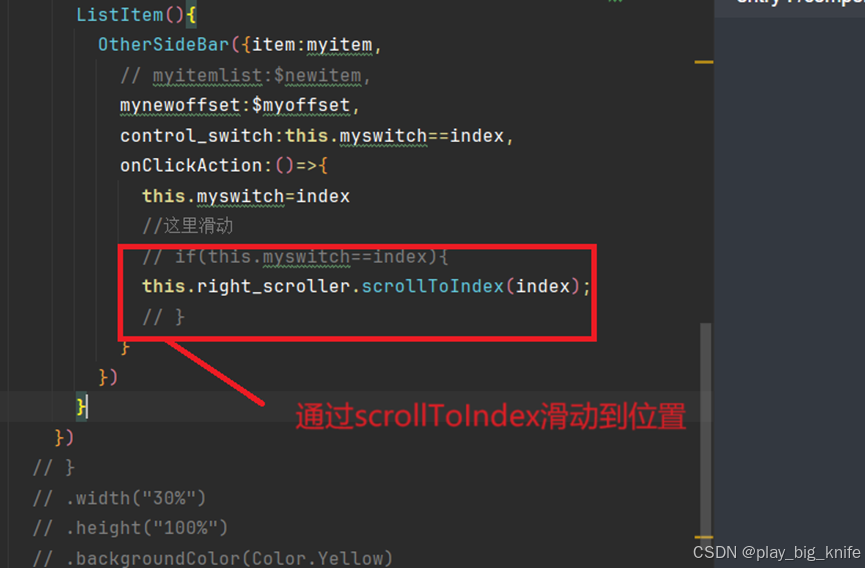
鸿蒙项目云捐助第十讲鸿蒙App应用分类页面二级联动功能实现
鸿蒙项目云捐助第十讲鸿蒙App应用分类页面二级联动功能实现 在之前的教程中完成了分类页面的左右两侧的列表结构,如下图所示。 接下来需要实现左侧分类导航项的点击操作,可以友好的提示用户选择了哪一个文字分类导航项。 一、左侧文字分类导航的处理 …...
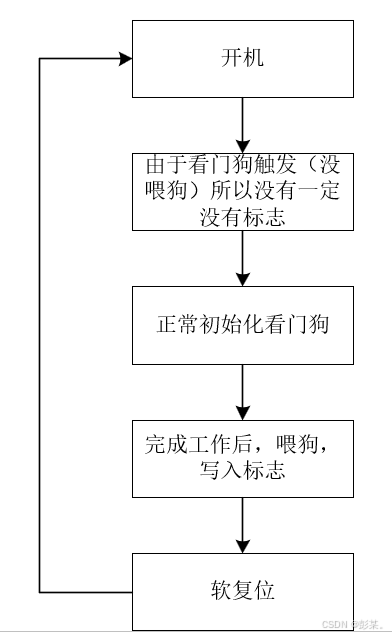
STM32低功耗模式结合看门狗
STM32低功耗模式结合看门狗 前言 最近做到一个需求要使用STM32的低功耗模式进行长时间待机应用,每隔十分钟发送一次数据到服务器上,当不发送的时候就处于低功耗模式。在经过一段时间的测试以后发现板子过三四天左右就没有数据上传服务器了,…...
数据迁移工具,用这8种!
前言 最近有些小伙伴问我,ETL数据迁移工具该用哪些。 ETL(是Extract-Transform-Load的缩写,即数据抽取、转换、装载的过程),对于企业应用来说,我们经常会遇到各种数据的处理、转换、迁移的场景。 今天特地给大家汇总了一些目前…...
Sapro编程软件
Sapro软件是由西门子建筑科技公司开发的一款编程软件,主要用于Climatix控制器的编程、调试及相关功能实现.以下是其具体介绍: • 功能强大:可进行HVAC控制编程,实现设备控制、HMI用户访问和设备集成等功能,满足复杂的…...

Python图注意力神经网络GAT与蛋白质相互作用数据模型构建、可视化及熵直方图分析...
全文链接:https://tecdat.cn/?p38617 本文聚焦于图注意力网络GAT在蛋白质 - 蛋白质相互作用数据集中的应用。首先介绍了研究背景与目的,阐述了相关概念如归纳设置与转导设置的差异。接着详细描述了数据加载与可视化的过程,包括代码实现与分析…...

2024年图像处理、多媒体技术与机器学习
重要信息 官网:www.ipmml.org 时间:2024年12月27-29日 地点:中国-大理 简介 2024年图像处理、多媒体技术与机器学习(CIPMT 2024)将于2024年12月27-29日于中国大理召开。将围绕图像处理与多媒体技术、机器学习等在…...
java 1.8+springboot文件上传+vue3+ts+antdv
1.参考 使用SpringBoot优雅的实现文件上传_51CTO博客_springboot 上传文件 2.postman测试 报错 :postman调用时body参数中没有file单词 Resolved [org.springframework.web.multipart.support.MissingServletRequestPartException: Required request part file is…...
【机器人】机械臂轨迹和转矩控制对比
动力学控制和轨迹跟踪控制是机器人控制中的两个概念,它们在目标、方法和应用上有所不同,但也有一定关联。以下是它们的区别和联系: 1. 动力学控制 动力学控制是基于机器人动力学模型的控制方法,目标是控制机器人关节力矩或力&…...

如何利用矩阵化简平面上的二次型曲线
二次型曲线的定义 在二维欧式平面上,一个二次型曲线都可以写成一个关于 x , y x,y x,y的二元二次多项式: F ( x , y ) a 11 x 2 2 a 12 x y a 22 y 2 2 a 1 x 2 a 2 y a 0 0 \begin{equation} F(x,y)a_{11}x^22a_{12}xya_{22}y^22a_1x2a_2ya_00…...
)
Neo4j关系创建失败?手把手教你处理GraphRAG生成的异常ID格式(含正则清洗技巧)
Neo4j关系创建失败?手把手教你处理GraphRAG生成的异常ID格式(含正则清洗技巧) 当你满怀期待地将GraphRAG生成的知识图谱数据导入Neo4j,准备欣赏可视化成果时,却发现关系创建失败——这可能是每个数据工程师都经历过的噩…...

Mathtype公式识别:Magma多模态AI在教育领域的应用
Mathtype公式识别:Magma多模态AI在教育领域的应用 1. 引言 作为一名长期关注AI技术发展的从业者,我最近在测试微软开源的Magma多模态模型时,发现了一个特别有意思的应用场景——数学公式识别与处理。想象一下这样的场景:老师批改…...

MMC模块化多电平换流器Simulink仿真模型:N=10子模块的载波移相调制与多控制策略应用
MMC模块化多电平换流器,MMC-HVDC直流输电系统,单个桥臂N10个子模块,采用载波移相调制 simulink仿真模型。 为了测试控制性能良好,在1s时,额定有功功率10e6增加到15e6。 子模块电压2000V,直流电压20KV。 定有…...

基于CasRel的微信小程序开发:智能合同关键信息抽取工具
基于CasRel的微信小程序开发:智能合同关键信息抽取工具 1. 引言 你有没有过这样的经历?面对一份几十页的合同,需要手动找出甲方、乙方、合同金额、签约日期、违约责任条款……一页页翻,一行行看,不仅耗时费力&#x…...

Windows资源管理器HEIC缩略图:让iPhone照片在Windows上“活“起来
Windows资源管理器HEIC缩略图:让iPhone照片在Windows上"活"起来 【免费下载链接】windows-heic-thumbnails Enable Windows Explorer to display thumbnails for HEIC files 项目地址: https://gitcode.com/gh_mirrors/wi/windows-heic-thumbnails …...

从GlobeLand30数据到统计报表:QGIS分区统计+Excel,打造你的地表覆盖分析工作流
从GlobeLand30到专业报表:QGISExcel高效地表覆盖分析全流程 地表覆盖数据是理解区域生态环境、规划土地利用的重要基础。GlobeLand30作为30米分辨率的全球地表覆盖数据集,为研究者提供了高精度的分析素材。但如何将这些数据转化为可操作的见解࿱…...

LC_numStream:嵌入式轻量级数字流解析库
1. LC_numStream 库概述:面向嵌入式通信的轻量级数字流解析工具LC_numStream 是一个专为资源受限嵌入式系统设计的纯 C 语言文本数字流解析库。其核心定位并非通用字符串处理,而是解决嵌入式设备在串口、UART、I2C、SPI 或自定义协议通信中高频出现的一类…...

OpenCV实战:图像亮度、对比度与锐化的智能调节与优化
1. 图像处理基础概念解析 在开始动手实践之前,我们需要先理解几个关键概念。亮度、对比度和锐化这三个参数就像调节电视画面的三个旋钮,每个旋钮都会对图像产生独特的影响。 亮度(Brightness)就像房间里的灯光开关。调高亮度&…...

跨显卡上采样技术优化指南:从原理到实战的显卡性能提升方案
跨显卡上采样技术优化指南:从原理到实战的显卡性能提升方案 【免费下载链接】OptiScaler OptiScaler bridges upscaling/frame gen across GPUs. Supports DLSS2/XeSS/FSR2 inputs, replaces native upscalers, enables FSR3 FG on non-FG titles. Supports Nukem m…...
)
告别编译报错!手把手教你用Keil MDK5搭建GD32F103开发环境(含AC5编译器配置)
告别编译报错!手把手教你用Keil MDK5搭建GD32F103开发环境(含AC5编译器配置) 嵌入式开发新手在初次接触GD32F103时,往往会被各种编译报错搞得焦头烂额。特别是从STM32转过来的开发者,本以为操作流程相似,结…...