【机器人】机械臂轨迹和转矩控制对比
动力学控制和轨迹跟踪控制是机器人控制中的两个概念,它们在目标、方法和应用上有所不同,但也有一定关联。以下是它们的区别和联系:
1. 动力学控制
动力学控制是基于机器人动力学模型的控制方法,目标是控制机器人关节力矩或力,使其达到期望的状态(如位置、速度、加速度)。
特点
- 目标:根据期望的关节轨迹(位置、速度和加速度),计算关节力矩 τ\tau,使机器人沿着期望的轨迹运动。
- 依赖动力学模型:通过动力学方程计算关节力矩,公式为:

适用场景
- 用于高动态性能要求的任务。
- 复杂的操作环境,例如考虑机器人动力学耦合和外部干扰的场景。
- 提供关节力矩控制接口的伺服驱动器或系统。
示例

2. 轨迹跟踪控制
轨迹跟踪控制的重点是控制机器人沿着给定的轨迹运动。它关注的是末端执行器的位置和姿态是否准确地跟随给定的轨迹。
特点
- 目标:使机器人末端的实际轨迹
跟随期望轨迹
。
- 控制层次:可以基于关节空间(Joint Space)或笛卡尔空间(Task Space)实现。
- 在关节空间中,轨迹跟踪通过计算每个关节的期望位置。
- 在笛卡尔空间中,轨迹跟踪控制的是机器人末端的空间位姿。
实现方法
-
关节空间轨迹跟踪:
- 给定每个关节的期望轨迹
。
- 使用位置控制器(如 PID 控制)驱动关节运动。
- 不一定需要动力学模型。
- 给定每个关节的期望轨迹
-
笛卡尔空间轨迹跟踪:
- 给定机器人末端在笛卡尔空间中的期望轨迹。
- 通过逆运动学计算得到关节空间的期望轨迹。
适用场景
- 机器人末端需要执行复杂轨迹任务,例如焊接、绘图、喷涂等。
- 对末端轨迹跟踪精度要求较高。
示例
使用逆运动学计算末端期望位置 所需的关节角
,然后通过位置控制或动力学控制实现轨迹跟踪。
3. 两者的区别
| 特性 | 动力学控制 | 轨迹跟踪控制 |
|---|---|---|
| 目标 | 控制关节力矩 τ\tau 使机器人实现期望轨迹。 | 控制机器人末端或关节跟随期望轨迹。 |
| 依赖模型 | 需要精确的动力学模型,包括惯性、重力和摩擦等参数。 | 不一定需要动力学模型,但需要运动学或逆运动学计算。 |
| 控制变量 | 力矩 Tau、力 F。 | 末端轨迹(位姿)或关节位置 q。 |
| 应用场景 | 动力学建模精确、高动态性能任务(如力控、动态轨迹任务)。 | 末端任务复杂、轨迹精确要求高(如绘图、喷涂)。 |
| 实现难度 | 实现复杂,需要精确的动力学建模和复杂控制算法。 | 相对简单,可基于位置控制或运动学计算实现。 |
| 对轨迹跟踪的支持 | 可以通过力矩直接实现轨迹跟踪(高精度)。 | 轨迹跟踪是核心目标,但控制方法可以多样化(简单或复杂)。 |
4. 联系
- 动力学控制是实现轨迹跟踪控制的一个手段:
- 轨迹跟踪控制可以利用动力学控制器,通过计算关节力矩 Tau 实现期望轨迹。
- 轨迹跟踪控制可以独立于动力学控制,使用简单的 PID 控制器实现(如位置控制)。
5. 举例对比
动力学控制:
你需要机器人运动得非常流畅,并能考虑到惯性、重力和外部干扰的影响。例如:
- 机器人以高精度抓取快速移动的物体。
- 机器人在轨迹运动中承受非平衡负载(如搬运物品)。
轨迹跟踪控制:
你只需要机器人末端沿着特定路径运动,而不关心内部的动态特性。例如:
- 机器人在平面上画一个正弦曲线。
- 机器人按计划路径运动,但不需要处理动力学耦合。
总结
- 动力学控制是实现机器人高精度控制的底层手段,通过直接控制力矩来影响运动。
- 轨迹跟踪控制更注重实现末端的路径准确性,是一个更高层的控制目标,可以通过多种方式(动力学控制、位置控制等)实现。
相关文章:
【机器人】机械臂轨迹和转矩控制对比
动力学控制和轨迹跟踪控制是机器人控制中的两个概念,它们在目标、方法和应用上有所不同,但也有一定关联。以下是它们的区别和联系: 1. 动力学控制 动力学控制是基于机器人动力学模型的控制方法,目标是控制机器人关节力矩或力&…...

如何利用矩阵化简平面上的二次型曲线
二次型曲线的定义 在二维欧式平面上,一个二次型曲线都可以写成一个关于 x , y x,y x,y的二元二次多项式: F ( x , y ) a 11 x 2 2 a 12 x y a 22 y 2 2 a 1 x 2 a 2 y a 0 0 \begin{equation} F(x,y)a_{11}x^22a_{12}xya_{22}y^22a_1x2a_2ya_00…...
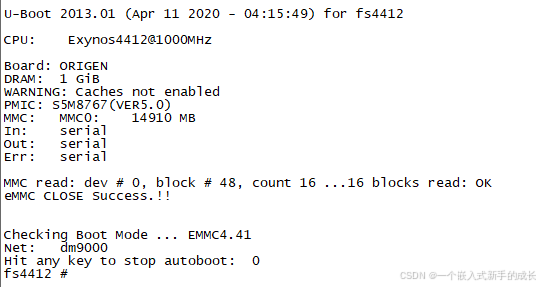
【系统移植】制作SD卡启动——将uboot烧写到SD卡
在开发板上启动Linux内核,一般有两种方法,一种是从EMMC启动,还有一种就是从SD卡启动,不断哪种启动方法,当开发板上电之后,首先运行的是uboot。 制作SD卡启动,首先要将uboot烧写到SD卡ÿ…...
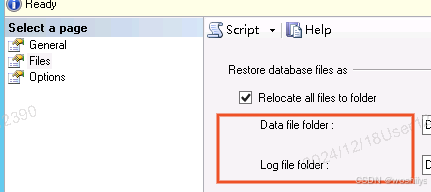
sql server 数据库还原,和数据检查
右键数据库选择还原, 还原的备份文件必须选择在本地的文件(远程文件没有试过)还原数据库名字可以修改,然后file选择中有个2个目录data file 的目录 ,和log data 的目录都可以重新选择还原到的新的目录,不要…...
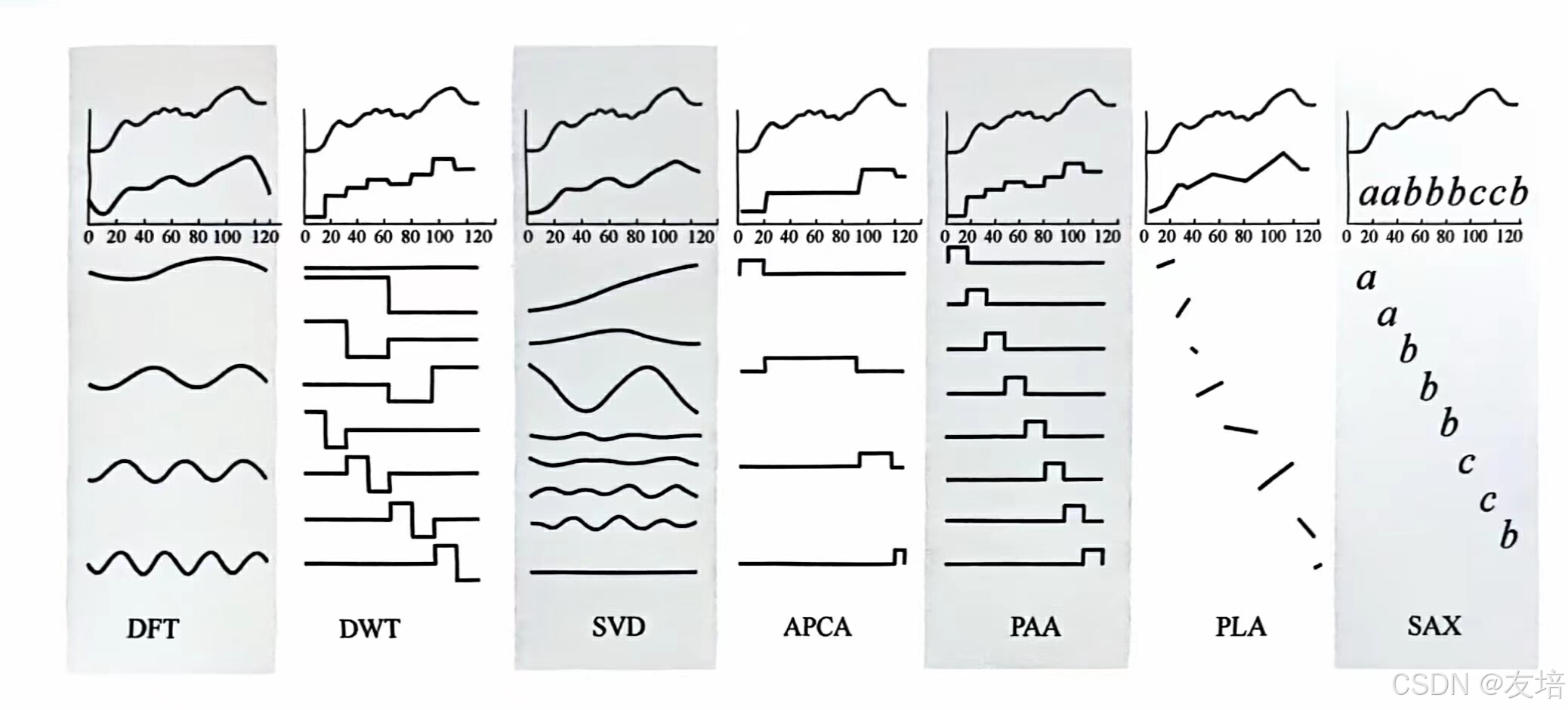
工业大数据分析算法实战-day12
文章目录 day12时序分解STL(季节性趋势分解法)奇异谱分析(SSA)经验模态分解(EMD) 时序分割ChangpointTreeSplitAutoplait有价值的辅助 时序再表征 day12 今天是第12天,昨天主要是针对信号处理算…...
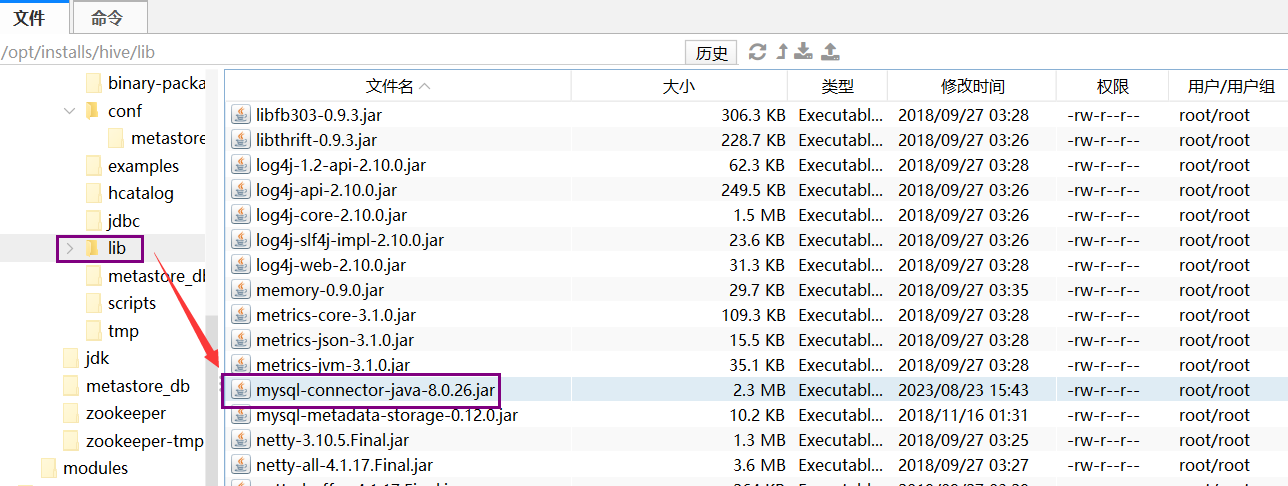
Hive其一,简介、体系结构和内嵌模式、本地模式的安装
目录 一、Hive简介 二、体系结构 三、安装 1、内嵌模式 2、测试内嵌模式 3、本地模式--最常使用的模式 一、Hive简介 Hive 是一个框架,可以通过编写sql的方式,自动的编译为MR任务的一个工具。 在这个世界上,会写SQL的人远远大于会写ja…...
LSTM-SVM时序预测 | Matlab基于LSTM-SVM基于长短期记忆神经网络-支持向量机时间序列预测
LSTM-SVM时序预测 | Matlab基于LSTM-SVM基于长短期记忆神经网络-支持向量机时间序列预测 目录 LSTM-SVM时序预测 | Matlab基于LSTM-SVM基于长短期记忆神经网络-支持向量机时间序列预测预测效果基本介绍程序设计参考资料 预测效果 基本介绍 1.LSTM-SVM时序预测 | Matlab基于LSTM…...

MacPorts 中安装高/低版本软件方式,以 RabbitMQ 为例
查询信息 这里以 RabbitMQ 为例,通过搜索得到默认安装版本信息: port search rabbitmq-server结果 ~/Downloads> port search rabbitmq-server rabbitmq-server 3.11.15 (net)The RabbitMQ AMQP Server ~/Downloads>获取二进制文件 但当前官网…...
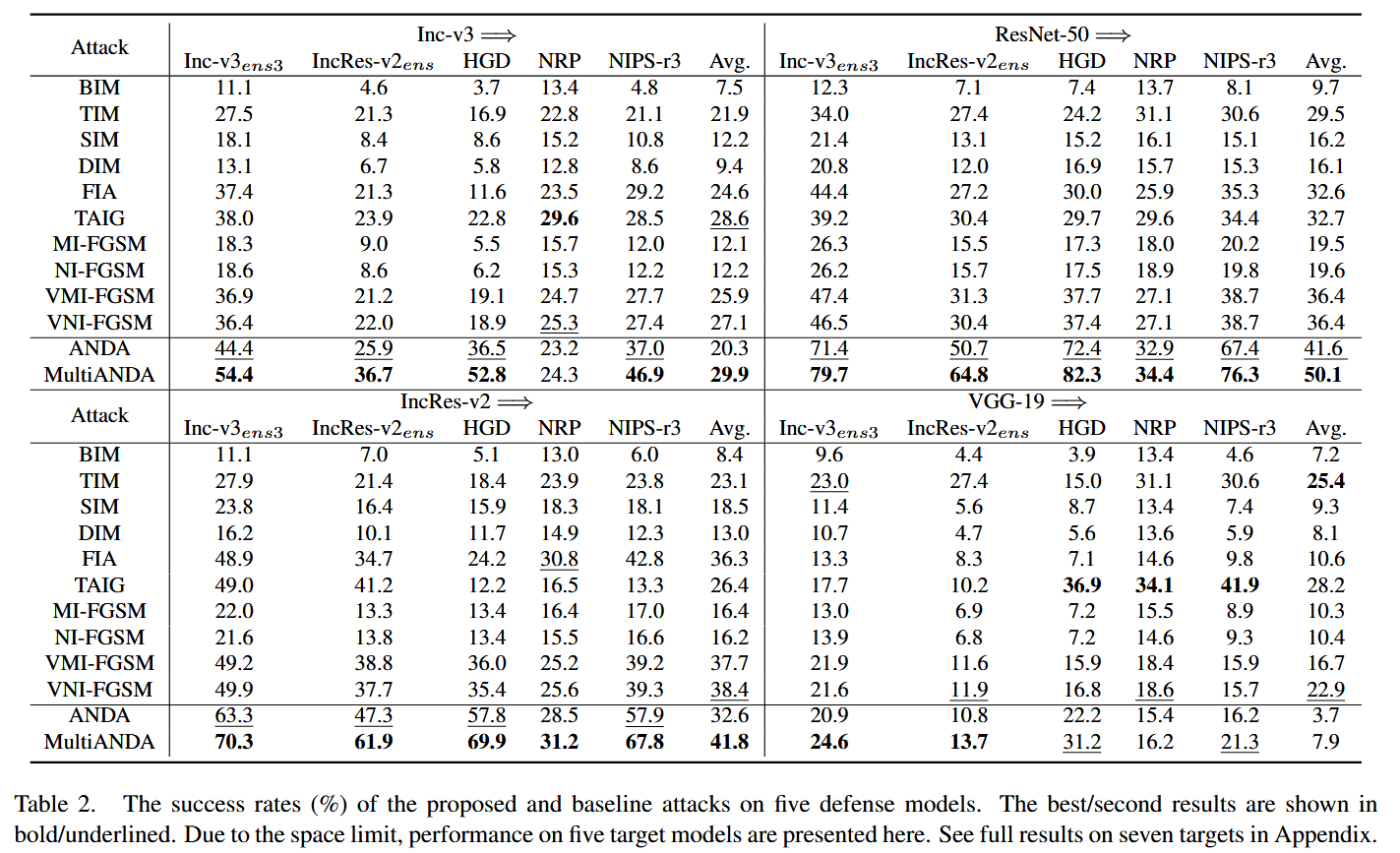
CVPR2024 | 通过集成渐近正态分布学习实现强可迁移对抗攻击
Strong Transferable Adversarial Attacks via Ensembled Asymptotically Normal Distribution Learning 摘要-Abstract引言-Introduction相关工作及前期准备-Related Work and Preliminaries1. 黑盒对抗攻击2. SGD的渐近正态性 提出的方法-Proposed Method随机 BIM 的渐近正态…...

建投数据与腾讯云数据库TDSQL完成产品兼容性互认证
近日,经与腾讯云联合测试,建投数据自主研发的人力资源信息管理系统V3.0、招聘管理系统V3.0、绩效管理系统V2.0、培训管理系统V3.0通过腾讯云数据库TDSQL的技术认证,符合腾讯企业标准的要求,产品兼容性良好,性能卓越。 …...

群晖利用acme.sh自动申请证书并且自动重载证书的问题解决
前言 21年的时候写了一个在群晖(黑群晖)下利用acme.sh自动申请Let‘s Encrypt的脚本工具 群晖使用acme自动申请Let‘s Encrypt证书脚本,自动申请虽然解决了,但是自动重载一直是一个问题,本人也懒,一想到去…...

质量小议51 - 茧房
茧房:茧房是指蚕茧所建的住所或空间,由一个蚕丝囊完全包裹住的一个密封的空间。 -- CSDN创作助手 信息茧房 - 指通过互联网和数字技术,将个人封闭在一个虚拟的信息环境中,使其只接收来自特定渠道的信息,而屏蔽其他信息…...

【C++图论】2359. 找到离给定两个节点最近的节点|1714
本文涉及知识点 C图论 打开打包代码的方法兼述单元测试 LeetCode2359. 找到离给定两个节点最近的节点 给你一个 n 个节点的 有向图 ,节点编号为 0 到 n - 1 ,每个节点 至多 有一条出边。 有向图用大小为 n 下标从 0 开始的数组 edges 表示,…...

重拾设计模式-外观模式和适配器模式的异同
文章目录 目的不同适配器模式:外观模式: 结构和实现方式不同适配器模式:外观模式: 对客户端的影响不同适配器模式:外观模式: 目的不同 适配器模式: 主要目的是解决两个接口不兼容的问题&#…...

51c自动驾驶~合集42
我自己的原文哦~ https://blog.51cto.com/whaosoft/12888355 #DriveMM 六大数据集全部SOTA!最新DriveMM:自动驾驶一体化多模态大模型(美团&中山大学) 近年来,视觉-语言数据和模型在自动驾驶领域引起了广泛关注…...

34 Opencv 自定义角点检测
文章目录 cornerEigenValsAndVecscornerMinEigenVal示例 cornerEigenValsAndVecs void cornerEigenValsAndVecs(InputArray src, --单通道输入8位或浮点图像OutputArray dst, --输出图像,同源图像或CV_32FC(6)int blockSize, --邻域大小值int ape…...

信创技术栈发展现状与展望:机遇与挑战并存
一、引言 在信息技术应用创新(信创)战略稳步推进的大背景下,我国信创技术栈已然在诸多关键层面收获了亮眼成果,不过也无可避免地遭遇了一系列亟待攻克的挑战。信创产业作为我国达成信息技术自主可控这一目标的关键一招,…...

跟我学c++中级篇——C++中的缓存利用
一、缓存 学习过计算机知识的一般都知道缓存这个概念,大约也知道缓存是什么。但是如果是程序员,如何更好的利用缓存,可能就有很多人不太清楚了。其实缓存的目的非常简单,就是了更高效的操作数据。大家都听说过“局部性原理”&…...

二叉树_堆
目录 一. 树(非线性结构) 1.1 树的概念与结构 1.2 树的表示 二. 二叉树 2.1 二叉树的概念与结构 2.2 特殊的二叉树 2.3 二叉树的存储结构 三. 实现顺序结构的二叉树 3.1 堆的概念与结构 一. 树(非线性结构) 1.1 树的概念与结构 概念ÿ…...

word文档中有大量空白行删除不掉,怎么办?
现象: 分页之间的空白行太多了( 按回车没用。删除也删除不掉 ) 解决办法: 按ctrl a 全选这个文档右击鼠标,点击【段落】选择【换行和分页】,然后把【分页】里的选项全部勾掉,然后点击【确定】…...

jsDelivr CDN:如何为你的开源项目选择最佳加速方案
1. 为什么你的开源项目需要jsDelivr CDN 作为一个开源项目维护者,我深刻理解静态资源加载速度对用户体验的影响。去年我的一个Vue组件库项目就遇到过这样的问题:海外用户访问飞快,但国内用户总是抱怨加载缓慢。直到我把资源托管到jsDelivr&am…...

HY-MT1.5-1.8B功能体验:格式保留翻译,完美处理srt字幕和网页标签
HY-MT1.5-1.8B功能体验:格式保留翻译,完美处理srt字幕和网页标签 1. 引言:翻译模型的新挑战 在全球化内容爆炸式增长的今天,传统翻译工具面临两大核心痛点: 格式丢失问题:翻译srt字幕、HTML网页等内容时…...

5块钱的国产RISC-V芯片CH32V103能干啥?我用它复刻了一个STM32F103的小项目
5元国产RISC-V芯片实战:用CH32V103复刻STM32经典项目 在电子DIY领域,成本始终是创客们无法回避的现实问题。当我在某电商平台发现CH32V103这颗标价仅5元的RISC-V芯片时,第一反应是怀疑它的实用性——毕竟同级别的STM32F103C8T6价格通常在15-2…...

March7thAssistant:崩坏:星穹铁道企业级自动化解决方案
March7thAssistant:崩坏:星穹铁道企业级自动化解决方案 【免费下载链接】March7thAssistant 崩坏:星穹铁道全自动 三月七小助手 项目地址: https://gitcode.com/gh_mirrors/ma/March7thAssistant 【核心价值定位】游戏工作室效率倍增引…...

5G NR实战:LDPC与Polar编码在真实场景中的选择与优化技巧
5G NR实战:LDPC与Polar编码在真实场景中的选择与优化技巧 当你在基站调试现场遇到突发的大流量视频传输需求,或是需要为工业自动化设备配置毫秒级响应的控制信道时,编码方案的选择往往决定着整个通信系统的成败。LDPC和Polar这对5G NR的"…...

Lychee-rerank-mm在音乐推荐中的创新应用
Lychee-rerank-mm在音乐推荐中的创新应用 1. 引言 你有没有遇到过这样的情况:在音乐平台上听到一首很喜欢的歌,想找类似的音乐,但系统推荐的歌曲却总是差强人意?要么封面风格完全不搭,要么歌词主题南辕北辙ÿ…...

跨平台部署YOLOv5的路径陷阱:从WindowsPath错误看Python pathlib的兼容性设计
1. 当WindowsPath遇上Linux:YOLOv5部署的路径陷阱 最近帮朋友调试一个YOLOv5模型部署问题,场景特别典型:在Windows训练好的目标检测模型,迁移到Linux服务器就报错。错误信息直指一个看似简单的路径问题:"NotImple…...
)
Conda环境管理全攻略:从零配置到VSCode无缝衔接(附清华镜像加速)
Conda环境管理全攻略:从零配置到VSCode无缝衔接(附清华镜像加速) 在数据科学和机器学习领域,Python环境的配置与管理往往是项目开始的第一步,也是最容易让初学者感到困惑的环节。不同项目可能需要不同版本的Python解释…...

基于博途1200PLC+HMI的六层三部电梯控制系统仿真程序
基于博途1200PLCHMI六层三部电梯控制系统仿真 程序: 1、任务:PLC.人机界面控制三部电梯集群运行 2、系统说明: 系统设有上呼、下呼、内呼、手动开关门、光幕、检修、故障、满载、等模拟模式控制, 系统共享厅外召唤信号,…...
函数实战:如何安全高效地处理内存重叠拷贝)
【C语言】memmove()函数实战:如何安全高效地处理内存重叠拷贝
1. 为什么需要memmove()函数? 在C语言中处理内存拷贝时,我们经常会遇到一个棘手的问题:当源内存块和目标内存块存在重叠区域时,使用memcpy()函数可能会导致数据被意外覆盖。想象一下你在整理书架,想把第三层到第五层的…...