Unity A*算法实现+演示
注意:
本文是对基于下方文章链接的理论,并最终代码实现,感谢作者大大的描述,非常详细,流程稍微做了些改动,文末有工程网盘链接,感兴趣的可以下载。
A*算法详解(个人认为最详细,最通俗易懂的一个版本)-CSDN博客
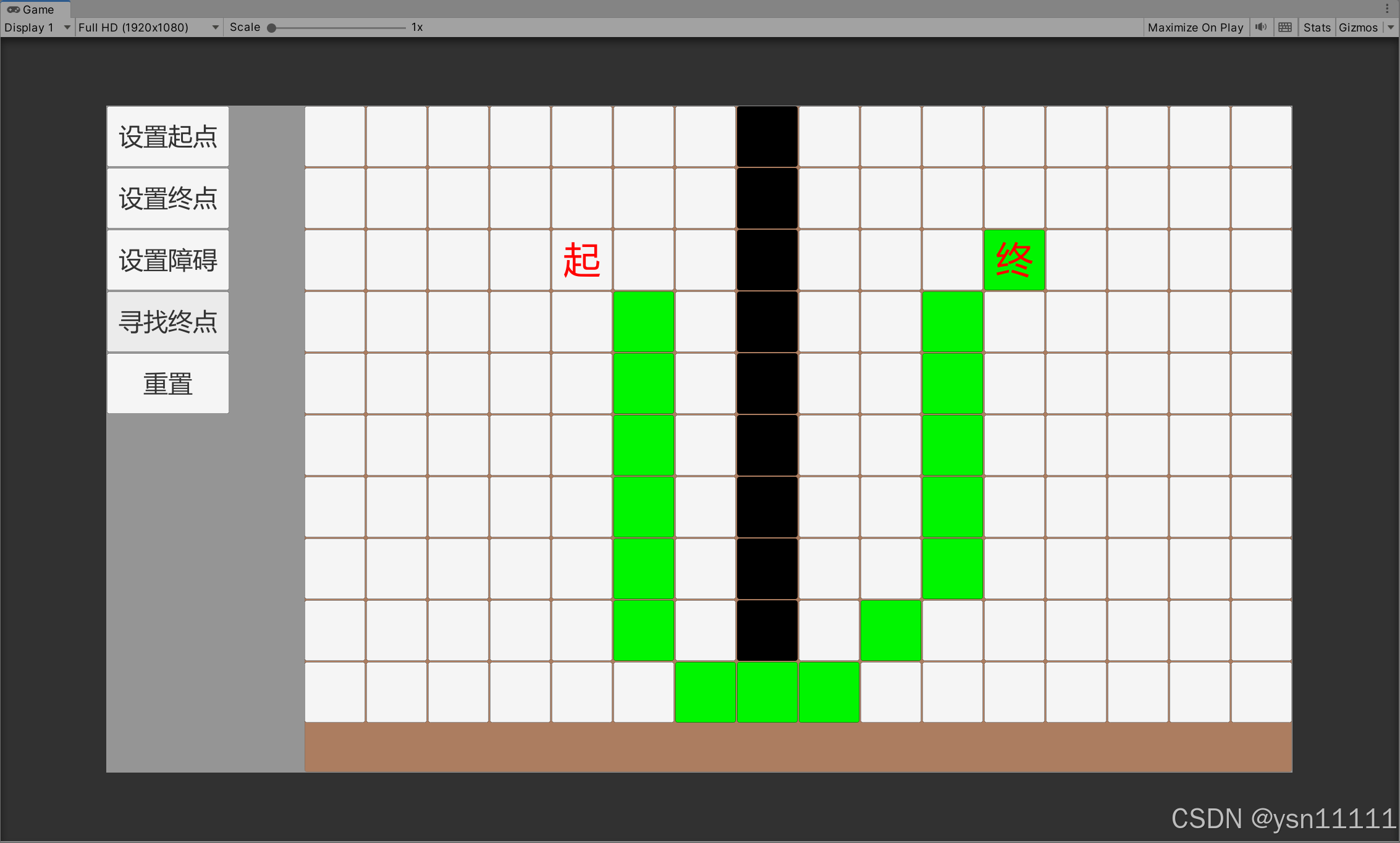
1、效果演示:

2、A*算法流程:
(1) 把起点加入 open list 。
(2) 重复如下过程:
a. 遍历 open list ,查找 F 值最小的节点,把它作为当前要处理的节点。
b. 对当前方格的 8连通的每一个方格
◆ 如果它是不可抵达的或者它在 close list 中,忽略它。否则,做如下操作。
◆ 如果它不在 open list 中,把它加入 open list ,并且把当前方格设置为它的父亲,记录该方格的 F , G 和 H 值。
◆ 如果它已经在 open list 中,检查这条路径 ( 即经由当前方格到达它那里 ) 是否更好,用 G 值作参考。更小的 G 值表示这是更好的路径。如果是这样,把它的父亲设置为当前方格,并重新计算它的 G 和 F 值。
c. 把这个节点移到 close list 。
d. 停止,当你
◆ 把终点加入到了 open list 中,此时路径已经找到了,或者
◆ 查找终点失败,并且 open list 是空的,此时没有路径。
(3) 保存路径。从终点开始,每个方格沿着父节点移动直至起点,这就是你的路径。
3、代码:
逻辑层Node结点定义:
using UnityEngine;public enum GridState
{Empty,Block,
}
public class Node
{public GridState curState;public int X;public int Y;public int F;public int G;public int H;public Node parentNode;public Node(int x, int y){X = x;Y = y;ResetNode();}public void ResetNode(){curState = GridState.Empty;F = 0;G = 0;H = 0;parentNode = null;}public void CalculateValue(Node endNode){if (parentNode == null) return;//计算GG = GetPredictGValue(parentNode);//曼哈顿距离计算HH = Mathf.Abs(endNode.X - X) + Mathf.Abs(endNode.Y - Y);F = G + H;}public int GetPredictGValue(Node targetNode){int predictG = 0;//四连通if (targetNode.X == X || targetNode.Y == Y){predictG = targetNode.G + 10;}//八连通else{predictG = targetNode.G + 14;}return predictG;}}
寻路算法:
using System.Collections.Generic;public partial class PathFind
{private List<Node> openList;private List<Node> closeList;private Node[,] allNodeList;public void AStarInit(Node[,] allNodes){openList = new List<Node>();closeList = new List<Node>();allNodeList = allNodes;}public void FindRoad(Node startNode, Node endNode){openList.Add(startNode);LoopFindRoad(endNode);}private void LoopFindRoad(Node endNode){//找到终点或者不存在路径if (openList.Count == 0||openList.Contains(endNode)){return;}//找到F值最小的Node smallestFNode = null;for (int i = 0; i < openList.Count; i++){if (smallestFNode == null){smallestFNode = openList[i];continue;}if (openList[i].F<=smallestFNode.F){smallestFNode = openList[i];}}//获得八连通格子List<Node> eightAdjacent = GetRoundNode(smallestFNode);//更新代价for (int i = 0; i < eightAdjacent.Count; i++){//不在openList里面if (!openList.Contains(eightAdjacent[i])){eightAdjacent[i].parentNode = smallestFNode;eightAdjacent[i].CalculateValue(endNode);openList.Add(eightAdjacent[i]);}else{//判断是否需要更新F,G,Hif (eightAdjacent[i].GetPredictGValue(smallestFNode) <= eightAdjacent[i].G){eightAdjacent[i].parentNode = smallestFNode;eightAdjacent[i].CalculateValue(endNode);}}}//转移结点openList.Remove(smallestFNode);closeList.Add(smallestFNode);LoopFindRoad(endNode);}/// <summary>/// 获得八连通格子中可达到并且不在closeList中的格子/// </summary>/// <returns></returns>private List<Node> GetRoundNode(Node targetNode){int x = targetNode.X;int y = targetNode.Y;List<Node> tempList = new List<Node>();if (IsReachableNode(x, y + 1)) tempList.Add(allNodeList[x, y + 1]);if (IsReachableNode(x + 1, y + 1)) tempList.Add(allNodeList[x + 1, y + 1]);if (IsReachableNode(x + 1, y)) tempList.Add(allNodeList[x + 1, y]);if (IsReachableNode(x + 1, y - 1)) tempList.Add(allNodeList[x + 1, y - 1]);if (IsReachableNode(x, y - 1)) tempList.Add(allNodeList[x, y - 1]);if (IsReachableNode(x - 1, y - 1)) tempList.Add(allNodeList[x - 1, y - 1]);if (IsReachableNode(x - 1, y)) tempList.Add(allNodeList[x - 1, y]);if (IsReachableNode(x - 1, y + 1)) tempList.Add(allNodeList[x - 1, y + 1]);return tempList;}/// <summary>/// 判断格子是否可到达/// </summary>/// <param name="x"></param>/// <param name="y"></param>/// <returns></returns>private bool IsReachableNode(int x, int y){if (x >= allNodeList.GetLength(0) || x <= 0){return false;}if (y >= allNodeList.GetLength(1) || y <= 0){return false;}if (allNodeList[x, y].curState == GridState.Block){return false;}if (closeList.Contains(allNodeList[x, y])){return false;}return true;}
}
4、补充:
如果希望过障碍时,不允许他斜向过障碍,可以额外加个判断,原理很简单,对于8连通的角落点,判断角落点的4连通是否有障碍,如果有障碍就不算入可到达格子。
代码如下:

演示:

5、工程网盘链接:
通过网盘分享的文件:AStarDemo.unitypackage
链接: https://pan.baidu.com/s/1L_f1DIkqe9Oqm_dnFSSVew 提取码: 1212
相关文章:
Unity A*算法实现+演示
注意: 本文是对基于下方文章链接的理论,并最终代码实现,感谢作者大大的描述,非常详细,流程稍微做了些改动,文末有工程网盘链接,感兴趣的可以下载。 A*算法详解(个人认为最详细,最通俗易懂的一…...
是基于隐私法规的要求,VUE 实现,html 代码)
浏览器要求用户确认 Cookies Privacy(隐私相关内容)是基于隐私法规的要求,VUE 实现,html 代码
Cookie Notices and Cookie Consent | Cookiepedia 1. 法律法规要求 许多国家和地区的隐私法律要求网站在存储或处理用户数据(包括 Cookies)之前必须获得用户的明确同意: GDPR(欧盟通用数据保护条例) 要求ÿ…...

如何设计高效的商品系统并提升扩展性:从架构到实践的全方位探索
在现代电商、零售及企业资源管理系统中,商品管理无疑是核心模块之一。随着市场的变化与企业规模的扩展,商品系统需要具备强大的功能支持以及高效的扩展能力,以应对日益复杂的业务需求。一个设计良好的商品系统不仅仅是一个商品信息的容器&…...

使用计算机创建一个虚拟世界
创建一个虚拟世界是一项复杂而多方面的工作,它涉及多个领域的知识,包括计算机图形学、编程、物理模拟、声音设计、艺术设计等。以下是创建虚拟世界的基本步骤和工具建议: 1. 确定虚拟世界的目标和范围 目标:明确这个虚拟世界的用…...
datasets笔记:两种数据集对象
Datasets 提供两种数据集对象:Dataset 和 ✨ IterableDataset ✨。 Dataset 提供快速随机访问数据集中的行,并支持内存映射,因此即使加载大型数据集也只需较少的内存。IterableDataset 适用于超大数据集,甚至无法完全下载到磁盘或…...

【ETCD】【Linearizable Read OR Serializable Read】ETCD 数据读取:强一致性 vs 高性能,选择最适合的读取模式
ETCD 提供了两种不同类型的读取操作方式,分别是 Linearizable Read(线性化读取)和 Serializable Read(可串行化读取)。这两种方式主要区分在读取数据时对一致性的要求不同。 目录 1. Linearizable Read(线…...
【CSS in Depth 2 精译_089】15.2:CSS 过渡特效中的定时函数
当前内容所在位置(可进入专栏查看其他译好的章节内容) 第五部分 添加动效 ✔️【第 15 章 过渡】 ✔️ 15.1 状态间的由此及彼15.2 定时函数 ✔️ 15.2.1 定制贝塞尔曲线 ✔️15.2.2 阶跃 ✔️ 15.3 非动画属性 文章目录 15.2 定时函数 Timing function…...

不常用命令指南
常用命令网上资料很多,讲的也不错。这里记录下日常工作中用到的,但对于新手又不常用的命令 文章目录 信息相关进程相关htoppgrep(根据指定的条件获取进程id)lsof 网络相关ssnc(netcat) 信息相关 进程相关 …...

spring mvc | servlet :serviceImpl无法自动装配 UserMapper
纯注解SSM整合 解决办法: 在MybatisConfig添加 Configuration MapperScan("mapper")...
STM32 HAL库之串口接收不定长字符
背景 在项目开发过程中,经常会使用MCU的串口与外界进行通信,例如两个单片机之间TTL电平型串口通信,单片机与成熟电路模块之间的串口通信等等.... 如何高效的使用串口是开发人员必须关注的问题。 STM32的HAL库为我们提供了三种串口通信机制&am…...
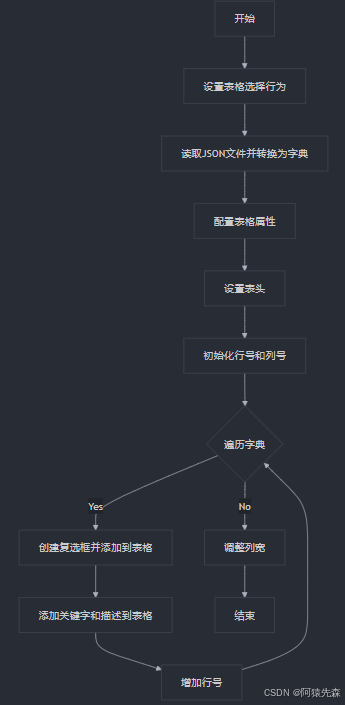
Pyqt6的tableWidget填充数据
代码 from PySide6.QtWidgets import QTableWidget QTableWidgetItemdef tableInit(self):self.tableWidgetself.tableWidget.setSelectionBehavior(QAbstractItemView.SelectRows)module_keyWord readJsonToDict(keyWordFileDir module_name) #读取模块关键字json字典数据s…...
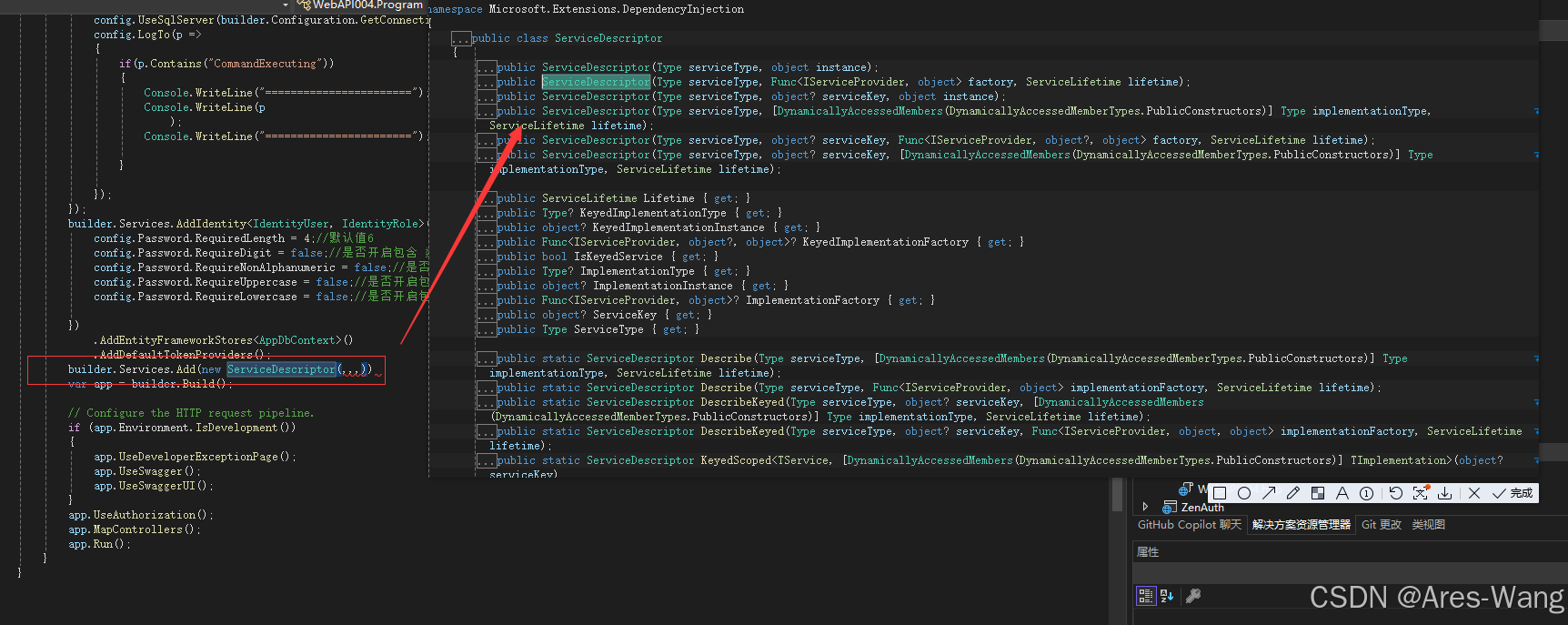
ASP.NET Core - 依赖注入 自动批量注入
依赖注入配置变形 随着业务的增长,我们项目工作中的类型、服务越来越多,而每一个服务的依赖注入关系都需要在入口文件通过Service.Add{}方法去进行注册,这将是非常麻烦的,入口文件需要频繁改动,而且代码组织管理也会变…...
virtual interface 再续篇)
UVM 验证方法学之interface学习系列文章(十一)virtual interface 再续篇
一 前言 并非总是可以将被测单元(DUT)视为一个黑盒,即仅监控和驱动DUT的顶层端口信号。这一点在从模块级测试转向更大规模的系统级测试时尤为明显。有时,我们需要了解实现细节以便访问DUT内部的信号。这被称为白盒验证。 Verilog一直提供从其他作用域访问几乎任何层次结构…...

面试题整理5----进程、线程、协程区别及僵尸进程处理
面试题整理5----进程、线程、协程区别及僵尸进程处理 1. 进程、线程与协程的区别1.1 进程(Process)1.2 线程(Thread)1.3 协程(Coroutine)2. 总结对比 3. 僵尸进程3.1 什么是僵尸进程?3.2 僵尸进…...

OpenTK 中帧缓存的深度解析与应用实践
摘要: 本文深入探讨了 OpenTK 中帧缓存的使用。首先介绍了帧缓存的基本概念与在图形渲染管线中的关键地位,包括其与颜色缓存、深度缓存、模板缓存等各类缓存的关联。接着详细阐述了帧缓存对象(FBO)的创建、绑定与解绑等操作,深入分析了纹理附件、渲染缓冲区附件在 FBO 中的…...
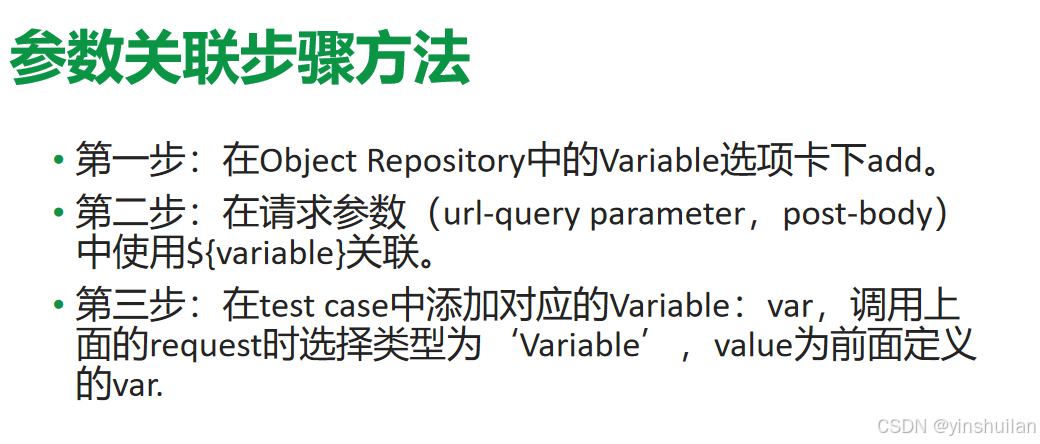
第2节-Test Case如何调用Object Repository中的请求并关联参数
前提: 已经创建好了project(File -> New -> Project,Type:API/WebService),object repository中已经创建了RESTful endpoint(Object Repository -> New -> Web Service Request&am…...
【HarmonyOS NEXT】Web 组件的基础用法以及 H5 侧与原生侧的双向数据通讯
关键词:鸿蒙、ArkTs、Web组件、通讯、数据 官方文档Web组件用法介绍:文档中心 Web 组件加载沙箱中页面可参考我的另一篇文章:【HarmonyOS NEXT】 如何将rawfile中文件复制到沙箱中_鸿蒙rawfile 复制到沙箱-CSDN博客 目录 如何在鸿蒙应用中加…...
-Kotlin编程语言-数据类与单例类)
Android学习(六)-Kotlin编程语言-数据类与单例类
假设我们要创建一个表示书籍的数据类 Book,包含书名和作者两个字段。在 Java 中,代码如下: public class Book { String title; String author; public Book(String title, String author) { this.title title; this.author author; } Ove…...

CV-OCR经典论文解读|An Empirical Study of Scaling Law for OCR/OCR 缩放定律的实证研究
论文标题 An Empirical Study of Scaling Law for OCR OCR 缩放定律的实证研究 论文链接: An Empirical Study of Scaling Law for OCR论文下载 论文作者 Miao Rang, Zhenni Bi, Chuanjian Liu, Yunhe Wang, Kai Han 内容简介 本论文在光学字符识别…...

力扣274. H 指数
给你一个整数数组 citations ,其中 citations[i] 表示研究者的第 i 篇论文被引用的次数。计算并返回该研究者的 h 指数。 根据维基百科上 h 指数的定义:h 代表“高引用次数” ,一名科研人员的 h 指数 是指他(她)至少发…...

实战指南:基于快马生成代码构建支持验证码的2048论坛登录系统
实战指南:基于快马生成代码构建支持验证码的2048论坛登录系统 最近在开发一个2048游戏社区时,需要为论坛设计一个安全可靠的登录入口。这个登录系统不仅要考虑用户体验,还要兼顾安全性。通过InsCode(快马)平台生成的代码作为基础,…...

ChatTTS实战:从WAV到PT的高效转换技术解析
在语音合成和语音处理的工作流中,数据预处理是至关重要的一环。我们常常从麦克风、录音设备或公开数据集中获得最原始的WAV格式音频,但深度学习模型,尤其是基于PyTorch的模型,其“母语”是张量(Tensor)。因…...

零基础学习数据库:用快马AI生成你的第一个可操作图书管理系统
作为一个刚接触数据库的小白,最近在InsCode(快马)平台上尝试做了一个图书管理系统项目,整个过程意外地顺利。这里记录下我的学习心得,希望能帮到同样零基础的朋友们。 为什么选择图书管理系统作为入门项目 图书管理系统包含了数据库最基础的…...

CentOS 8下openLDAP服务器搭建避坑指南:从第三方仓库到phpLDAPadmin配置
CentOS 8企业级openLDAP部署实战:从仓库选择到安全加固全解析 在当今企业IT架构中,目录服务作为身份认证和资源管理的核心组件,其重要性不言而喻。而openLDAP作为开源目录服务的标杆解决方案,凭借其轻量高效、跨平台兼容的特性&am…...

OpenClaw调试技巧:GLM-4.7-Flash任务执行日志分析与问题定位
OpenClaw调试技巧:GLM-4.7-Flash任务执行日志分析与问题定位 1. 为什么需要关注OpenClaw的调试日志 上周我在尝试用OpenClaw自动整理项目文档时,遇到了一个奇怪的现象:任务明明显示执行成功,但最终生成的Markdown文件却缺失了关…...

【北约】认知雷达信号处理 Cognitive Radar Signal Processing
本文仅供学习使用如有侵权,请联系本人删除 This article is for educational purposes only. If there is any copyright infringement, please contact me to have it removed....

MT5中文数据增强神器:无需训练,直接生成多样化的句子变体
MT5中文数据增强神器:无需训练,直接生成多样化的句子变体 1. 为什么需要中文文本数据增强 在自然语言处理领域,数据是模型训练的基础。但获取高质量的中文标注数据往往面临三大难题: 数据稀缺:特定领域(…...

快速部署:在星图AI平台训练PETRV2-BEV模型,支持NuScenes数据集
快速部署:在星图AI平台训练PETRV2-BEV模型,支持NuScenes数据集 1. 环境准备与快速部署 1.1 激活Paddle3D环境 首先需要确保已经创建并激活了Paddle3D的conda环境: conda activate paddle3d_env如果尚未创建该环境,建议先安装M…...

零基础掌握Degrees of Lewdity本地化工具:开源项目中文适配方案全攻略
零基础掌握Degrees of Lewdity本地化工具:开源项目中文适配方案全攻略 【免费下载链接】Degrees-of-Lewdity-Chinese-Localization Degrees of Lewdity 游戏的授权中文社区本地化版本 项目地址: https://gitcode.com/gh_mirrors/de/Degrees-of-Lewdity-Chinese-Lo…...

Phi-4-Reasoning-Vision实操手册:官方SYSTEM PROMPT精准适配教程
Phi-4-Reasoning-Vision实操手册:官方SYSTEM PROMPT精准适配教程 1. 工具概览 Phi-4-Reasoning-Vision是基于微软Phi-4-reasoning-vision-15B多模态大模型开发的高性能推理工具,专为双卡4090环境优化。这个工具严格遵循官方SYSTEM PROMPT规范ÿ…...