细说STM32F407单片机通过IIC读写EEPROM 24C02
目录
一、操作说明
二、工程配置
1、时钟、DEBUG、GPIO、USART6、NVIC、Code Generator
2、 IIC2
(1)Master Features组,主设备参数
(2)Slave Features组,从设备参数
三、软件设计
1、KELED
2、EEPROM
(1)24cxx.c
(2)24cxx.h
3、main.c
四、下载与运行
本文旨在通过使用STM32F407的IIC总线读写 EEPROM 24C02。
一些细节可以参考本文作者写的其他文章。
参考文章1:细说STM32F407单片机轮询方式读写SPI FLASH W25Q16BV-CSDN博客 https://wenchm.blog.csdn.net/article/details/144587209
参考文章2,细说STM32F407单片机IIC总线基础知识-CSDN博客 https://wenchm.blog.csdn.net/article/details/144717358
一、操作说明
项目使用旺宝红龙开发板,STM32F407ZGT6 KIT V1.0。 使用开发板上的按键S2、S3、S4、S5,依次按下诸键后执行如下操作,并且使用开发板上的LED灯,依次显示操作状态。S6是复位键。

[S2]KeyUp = Write a number LED1
[S3]KeyDown = Read the number LED2
[S4]KeyLeft = Write a string LED3
[S5]KeyRight= Read the string LED4二、工程配置
1、时钟、DEBUG、GPIO、USART6、NVIC、Code Generator
与参考文章2相同。
I2C的中断事件主要是表示传输过程和错误的一些事件,由于I2C通信是一种应答式通信,与其他外设的轮询式操作类似,本例不开启I2C2的中断。I2C也具有DMA功能,但是24C02操作的数据量小,没有使用DMA的必要。如果需要使用I2C接口的中断或DMA数据传输功能,可看参考文章中介绍的中断方式和DMA方式相关函数。
2、 IIC2
占用管脚PF0、PF1。默认全部设置。
(1)Master Features组,主设备参数
- I2C Speed Mode,速度模式。可选标准模式(Standard Mode)或快速模式(Fast Mode)。
- I2C Clock Speed (Hz),I2C时钟速度。标准模式最大值为100kHz,快速模式最大值为400kHz。
- Fast Mode Duty Cycle,快速模式占空比。选择快速模式后这个参数会出现,用于设置时钟信号的占空比,是一个周期内低电平与高电平的时间比,有2:1和16:9两种选项。
本示例中,速度模式选择标准模式。
(2)Slave Features组,从设备参数
- Clock No Stretch Mode,禁止时钟延长。设置为Disabled表示允许时钟延长。
- Primary AddressLength selection,设备主地址长度。可选7-bit或10-bit,本例选择7-bit。
- DualAddress Acknowledge,双地址确认。从设备可以有两个地址,如果设置为Enabled。还会出现一个Secondary slave address参数,用于设置从设备副地址。
- Primary slave address,从设备主地址。设置从设备主地址,作为I2C从设备时才需要设置。
- General Call address detection,广播呼叫检测。设置为Disabled表示禁止广播呼叫,不对地址0x00应答;否则,就是允许广播呼叫,对地址0x00应答。
STM32F407是I2C主设备,无须设置从设备地址。24C02是I2C从设备,其从设备地址是0xA0。
三、软件设计
1、KELED
keyled.c和keyled.h与参考文章相同。
2、EEPROM
在项目中创建EEPROM文件夹,并在其中设计24cxx.c和24cxx.h。
为便于程序的移植,在文件24cxx.h中定义一个宏I2C_HANDLE替代hi2c2。如果使用了不同的I2C接口,只需修改这个宏定义即可,而I2C接口的外设初始化由CubeMX自动生成的函数完成。在24cxx.h中还定义了表示24C02地址的宏DEV_ADDR_24CXX,如果实际电路中的24C02的I2C地址被修改了,修改这个宏即可。
在文件24cxx.h中定义了5个函数,前面4个都是直接封装I2C的HAL传输函数实现的,最后1个函数EP24C_WriteLongData()能自动将一个长的数据拆分为多个页(每页8字节)写入,这5个函数都使用I2C的阻塞式存储器数据传输函数。
(1)24cxx.c
/* 文件: 24cxx.c* 描述: 24C02驱动程序源程序文件*/#include "24cxx.h"
#define EP24C_TIMEOUT 200 //超时等待时间,单位:ms
#define EP24C_MEMADD_SIZE I2C_MEMADD_SIZE_8BIT //存储器地址大小,8位地址//检查设备是否准备好I2C通讯,返回HAL_OK 表示OK
HAL_StatusTypeDef EP24C_IsDeviceReady(void)
{uint32_t Trials=10; //尝试次数HAL_StatusTypeDef result=HAL_I2C_IsDeviceReady(&I2C_HANDLE,DEV_ADDR_24CXX,Trials,EP24C_TIMEOUT);return result;
}//向任意地址写入一个字节的数据, memAddr是存储器内部地址,byteData是需要写入的1个字节的数据
HAL_StatusTypeDef EP24C_WriteOneByte(uint16_t memAddress,uint8_t byteData)
{HAL_StatusTypeDef result=HAL_I2C_Mem_Write(&I2C_HANDLE,DEV_ADDR_24CXX,memAddress,EP24C_MEMADD_SIZE,&byteData,1,EP24C_TIMEOUT);return result;
}//从任意地址读出一个字节的数据, memAddr是存储器内部地址,byteData是读出的1个字节的数据,若返回HAL_OK表示读取成功
HAL_StatusTypeDef EP24C_ReadOneByte(uint16_t memAddress,uint8_t *byteData)
{HAL_StatusTypeDef result=HAL_I2C_Mem_Read(&I2C_HANDLE,DEV_ADDR_24CXX,memAddress,EP24C_MEMADD_SIZE,byteData,1,EP24C_TIMEOUT);return result;
}//连续读取数据,任意地址,任意长度,不受页的限制
HAL_StatusTypeDef EP24C_ReadBytes(uint16_t memAddress,uint8_t *pBuffer,uint16_t bufferLen)
{if(bufferLen>MEM_SIZE_24CXX) //超过总存储容量return HAL_ERROR;HAL_StatusTypeDef result=HAL_I2C_Mem_Read(&I2C_HANDLE,DEV_ADDR_24CXX,memAddress,EP24C_MEMADD_SIZE,pBuffer,bufferLen,EP24C_TIMEOUT);return result;
}//限定在一个页内写入连续数据,最多8字节。任意起始地址,但是起始地址+数据长度不能超过页边界
HAL_StatusTypeDef EP24C_WriteInOnePage(uint16_t memAddress,uint8_t *pBuffer,uint16_t bufferLen)
{if(bufferLen>PAGE_SIZE_24CXX) //数据长度不能大于页的大小return HAL_ERROR;HAL_StatusTypeDef result=HAL_I2C_Mem_Write(&I2C_HANDLE,DEV_ADDR_24CXX,memAddress,EP24C_MEMADD_SIZE,pBuffer,bufferLen,EP24C_TIMEOUT);return result;
}//写任意长的数据,可以超过8字节,但数据地址必须从页首开始,即 8*N。自动分解为多次写入
HAL_StatusTypeDef EP24C_WriteLongData(uint16_t memAddress,uint8_t *pBuffer,uint16_t bufferLen)
{if(bufferLen>MEM_SIZE_24CXX) //超过总存储容量return HAL_ERROR;HAL_StatusTypeDef result=HAL_ERROR;if(bufferLen<=PAGE_SIZE_24CXX) //不超过1个page,直接写入后退出{result=HAL_I2C_Mem_Write(&I2C_HANDLE,DEV_ADDR_24CXX,memAddress,EP24C_MEMADD_SIZE,pBuffer,bufferLen,EP24C_TIMEOUT);return result;}uint8_t *pt=pBuffer; //临时指针,不能改变传入的指针uint16_t pageCount=bufferLen/PAGE_SIZE_24CXX; //Page个数for(uint16_t i=0; i<pageCount; i++) //一次写入一个page的数据{result=HAL_I2C_Mem_Write(&I2C_HANDLE,DEV_ADDR_24CXX,memAddress,EP24C_MEMADD_SIZE,pt,PAGE_SIZE_24CXX,EP24C_TIMEOUT);pt += PAGE_SIZE_24CXX;memAddress += PAGE_SIZE_24CXX;HAL_Delay(5); //必须有延时,以等待页写完if (result != HAL_OK)return result;}uint16_t leftBytes=bufferLen % PAGE_SIZE_24CXX; //余数if (leftBytes>0) //写入剩余的数据result=HAL_I2C_Mem_Write(&I2C_HANDLE,DEV_ADDR_24CXX,memAddress,EP24C_MEMADD_SIZE,pt,leftBytes,EP24C_TIMEOUT);return result;
}(2)24cxx.h
/** 文件名:24cxx.h* 功能描述: 24C02 EEPROM驱动程序,使用HAL库** (1)24C02是 256字节EEPROM,可以单个字节读写,连续读写时按页读写,每页8字节。所以,按页读写时最多8字节,页号0--31** (2)连续写入数据时要注意不要超过页的边界,否则从页的开始处重新写,会覆盖原来的内容。** (3)24C02地址是 0b1010xxxy, 其中xxx由芯片的地址引脚A2,A1,A0决定,一般接地,所以是0xA0, HAL库在读写时自动在最后一位写0或1进行读或写操作** (4)24C02的地址数据长度是8位,使用宏定义符号I2C_MEMADD_SIZE_8BIT*/#ifndef __24cxx_H
#define __24cxx_H#include "stm32f4xx_hal.h"
#include "i2c.h" //i2c.h中定义了hi2c2
/* 两个与硬件相关的定义, */
#define I2C_HANDLE hi2c2 //I2C外设对象变量,利用i2c.h中定义的hi2c2
#define DEV_ADDR_24CXX 0x00A0 //24C02的写地址
// EEPROM存储器参数
#define PAGE_SIZE_24CXX 0x0008 //24C02的Page大小为8字节
#define MEM_SIZE_24CXX (uint16_t)256 //24C02总共容量字节数,8*32=256字节//检查设备是否准备好
HAL_StatusTypeDef EP24C_IsDeviceReady(void);//在任意地址写入一个字节
HAL_StatusTypeDef EP24C_WriteOneByte(uint16_t memAddress, uint8_t byteData);//在任意地址读出一个字节
HAL_StatusTypeDef EP24C_ReadOneByte(uint16_t memAddress, uint8_t *byteData);//连续读取数据,任意地址,任意长度,不受页的限制
HAL_StatusTypeDef EP24C_ReadBytes(uint16_t memAddress, uint8_t *pBuffer, uint16_t bufferLen);/*限定在一个页内写入连续数据,最多8字节。任意起始地址,*但是起始地址+数据长度不能超过页边界,即不能超过地址8*N-1 */
HAL_StatusTypeDef EP24C_WriteInOnePage(uint16_t memAddress, uint8_t *pBuffer, uint16_t bufferLen);//写任意长的数据,可以超过8字节,但数据地址必须从页首开始,即 8*N
HAL_StatusTypeDef EP24C_WriteLongData(uint16_t memAddress, uint8_t *pBuffer, uint16_t bufferLen);#endif
3、main.c
/* USER CODE BEGIN Includes */
#include "keyled.h"
#include "24cxx.h"
#include <stdio.h>
/* USER CODE END Includes *//* USER CODE BEGIN 2 */printf("Demo17_1:I2C Interface\r\n");printf("24C02:EEPROM, 256 bytes\r\n");printf("8 bytes/page, 32 pages\r\n");printf("I2C Device Address=0xA0\r\n");if (EP24C_IsDeviceReady() == HAL_OK)printf("Device is ready.\r\n");//显示菜单printf("[S2]KeyUp = Write a number\r\n");printf("[S3]KeyDown = Read the number\r\n");printf("[S4]KeyLeft = Write a string\r\n");printf("[S5]KeyRight= Read the string\r\n");// MCU output low level LED light is onLED1_OFF();LED2_OFF();LED3_OFF();LED4_OFF();/* USER CODE END 2 */ /* USER CODE BEGIN WHILE */uint8_t num1 = 107,num2;uint16_t addr_any = 4; //任意地址, 0-255uint16_t addr_page = 2*8; //Page2起始地址//uint8_t infoStr[50]; //用于生成显示信息字符��?while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */KEYS curKey = ScanPressedKey(KEY_WAIT_ALWAYS);switch(curKey){case KEY_UP:{if (EP24C_WriteOneByte(addr_any,num1) == HAL_OK)printf("Write %d at Address %d.\r\n",num1,addr_any);LED1_ON();LED2_OFF();LED3_OFF();LED4_OFF();}break;case KEY_DOWN:{if (EP24C_ReadOneByte(addr_any,&num2) == HAL_OK)printf("Read out %d at Address %d.\r\n",num2,addr_any);LED1_OFF();LED2_ON();LED3_OFF();LED4_OFF();}break;case KEY_LEFT:{uint8_t strIn[] = "University of Petroleum"; //自动加'\0'if (EP24C_WriteLongData(addr_page,strIn,sizeof(strIn)) == HAL_OK)printf("Write string from Page2:%s\r\n",strIn);LED1_OFF();LED2_OFF();LED3_ON();LED4_OFF();}break;case KEY_RIGHT:{uint8_t strOut[50];if (EP24C_ReadBytes(addr_page,strOut,50) == HAL_OK)printf("Read string from Page2:%s\r\n",strOut);LED1_OFF();LED2_OFF();LED3_OFF();LED4_ON();}break;case KEY_NONE:{LED1_OFF();LED2_OFF();LED3_OFF();LED4_OFF();}break;default:break;}printf("** Reselect menu or reset **\r\n");HAL_Delay(500); //延时500,消除按键后抖动}/* USER CODE END 3 */
}上述程序中有一个I2C_HandleTypeDef类型的结构体变量hi2c2,这是表示I2C2接口的外设对象变量,24C02的驱动程序文件24cxx.c中就使用这个外设对象变量访问I2C2接口。函数MX_I2C2_Init()中对hi2c2的各成员变量赋值,各赋值语句与STM32CubeIDE里的设置是对应的。完成hi2c2的赋值后,执行HAL_I2C_Init(&hi2c2)对I2C2接口进行初始化。
HAL_I2C_MspInit()是I2C接口的MSP初始化函数,在函数HAL_I2C_Init()里被调用。函数HAL_I2C_MspInit()的主要功能是对I2C2接口的复用引脚PF0和PF1进行GPIO引脚配置。
由STM32CubeIDE自动生成的代码,这里省略。
/* USER CODE BEGIN 4 *///串口打印
int __io_putchar(int ch)
{HAL_UART_Transmit(&huart6,(uint8_t*)&ch,1,0xFFFF);return ch;
}
/* USER CODE END 4 */四、下载与运行
下载,运行。依次按下开发板上的S2、S3、S4、S5按键,执行写入1字节,读出1字节、写入页字符串,读出页字符串。按下S6键,执行复位。

相关文章:
细说STM32F407单片机通过IIC读写EEPROM 24C02
目录 一、操作说明 二、工程配置 1、时钟、DEBUG、GPIO、USART6、NVIC、Code Generator 2、 IIC2 (1)Master Features组,主设备参数 (2)Slave Features组,从设备参数 三、软件设计 1、KELED 2、E…...

【AimRT】现代机器人通信中间件 AimRT
目录 一、什么是AimRT二、AimRT与ROS22.1 定位与设计2.2 组成与通信方式对比 三、AimRT基本概念3.1 Node、Pkg 和 Module3.2 Protocol、Channel、Rpc 和 Filter3.3 App模式 和 Pkg模式3.4 Executor3.5 Plugin 一、什么是AimRT AimRT 是智元机器人公司自主研发的一款机器人通信…...

Unity 读Excel,读取xlsx文件解决方案
Unity读取表格数据 效果: 思路: Unity可以解析Json,但是读取Excel需要插件的帮助,那就把这个功能分离开,读表插件就只管读表转Json,Unity就只管Json解析,中间需要一个存储空间,使用…...

R基于贝叶斯加法回归树BART、MCMC的DLNM分布滞后非线性模型分析母婴PM2.5暴露与出生体重数据及GAM模型对比、关键窗口识别
全文链接:https://tecdat.cn/?p38667 摘要:在母婴暴露于空气污染对儿童健康影响的研究中,常需对孕期暴露情况与健康结果进行回归分析。分布滞后非线性模型(DLNM)是一种常用于估计暴露 - 时间 - 响应函数的统计方法&am…...
)
【信息系统项目管理师】高分论文:论信息系统项目的沟通管理(信息管理服务一体化平台)
更多内容请见: 备考信息系统项目管理师-专栏介绍和目录 文章目录 论文一、事预则立,规划沟通管理二、提升支持,管理沟通三、观察偏差,监督沟通论文 2022年2月,我公司承建某省退役军人信息管理服务一体化平台项目,由于本人具有较丰富的项目管理经验,同时也是一名退伍军人…...

物联网工厂可视化监控平台:为智能制造打造的可视化大屏
01行业背景 随着技术的不断进步,物联网(IoT)已经成为推动数字化转型的核心力量。物联网通过连接各种设备和传感器,实现数据的实时收集、传输和分析,为各行各业带来了革命性的变化。随着5G、云计算、大数据等技术的成熟…...

3、redis的高可用
主从复制 主从复制:这是redis高可用的基础。哨兵模式和集群都是建立在此基础之上。 主从模式和数据库的主从模式是一样的,主负责写入,然后把写入的数据同步到从,从节点只能读不能写。read only。 不能做高可用的切换ÿ…...

数据结构--顺序表(详解)
欢迎大家来到我的博客~欢迎大家对我的博客提出指导,有错误的地方会改进的哦~点击这里了解更多内容 目录 一、线性表二、顺序表 一、线性表 线性表(linear list)是n个具有相同特性的数据元素的有限序列。 线性表是一种在实际中广泛使用的数据结…...

Day62 图论part11
Floyd 算法精讲 Floyd 算法代码很简单,但真正理解起原理 还是需要花点功夫,大家在看代码的时候,会发现 Floyd 的代码很简单,甚至看一眼就背下来了,但我为了讲清楚原理,本篇还是花了大篇幅来讲解。 代码随想…...

git clone 超时
git clone 超时 参考 https://blog.csdn.net/qq_45906972/article/details/142214187?utm_mediumdistribute.pc_relevant.none-task-blog-2defaultbaidujs_baidulandingword~default-0-142214187-blog-137158358.235v43pc_blog_bottom_relevance_base8&spm1001.2101.3001.…...

WPF编程excel表格操作
WPF编程excel表格操作 摘要NPOI安装封装代码测试代码 摘要 Excel操作几种方式 使用开源库NPOI(常用,操作丰富)使用Microsoft.Office.Interop.Excel COM组件(兼容性问题)使用OpenXml(效率高)使用OleDb(过时) NPOI安装 封装代码 using System; using System.IO; u…...
Day10补代码随想录 理论基础|232.用栈实现队列|225.用队列实现栈|20.有效的括号|1047.删除字符串中的所有相邻重复项
栈和队列理论基础 抽象认识 栈是先进后出(FIFO),队列是先进先出(LIFO) 队首(先进))队尾(后进)栈顶(后进)栈底(先进) 栈(Stack) 只在一端进行进出操作(只在一端进一端出)像个篮球框,取用篮球从一端进出。 /进栈 int a[1000];//足够大的栈空间 int top-1…...

【Devops】什么是Devops?(Development+Operations)和运维的区别?
DevOps(Development Operations)是一种将开发(Development)和运维(Operations)团队结合在一起的文化和实践,目的是通过自动化、协作和持续反馈来加快软件的开发、部署和运维的周期,…...

基于NodeMCU的物联网电灯控制系统设计
最终效果 基于NodeMCU的物联网电灯控制系统设计 小程序关灯 上图展现了小程序关灯过程的数据传输过程:用户下达关灯指令→小程序下发关灯指令→MQTT服务器接收关灯指令→下位机接收与处理关灯指令。 项目介绍 该项目是“物联网实验室监测控制系统设计(…...

Linux驱动开发 IIC I2C驱动 编写APP访问EEPROM AT24C02
在嵌入式开发中,I2C(Inter-Integrated Circuit)是一种常用的串行通信协议,广泛应用于与外设(如 EEPROM、传感器、显示屏等)进行数据交换。AT24C02 是一种常见的 I2C EEPROM 存储器,它提供 2Kbit…...
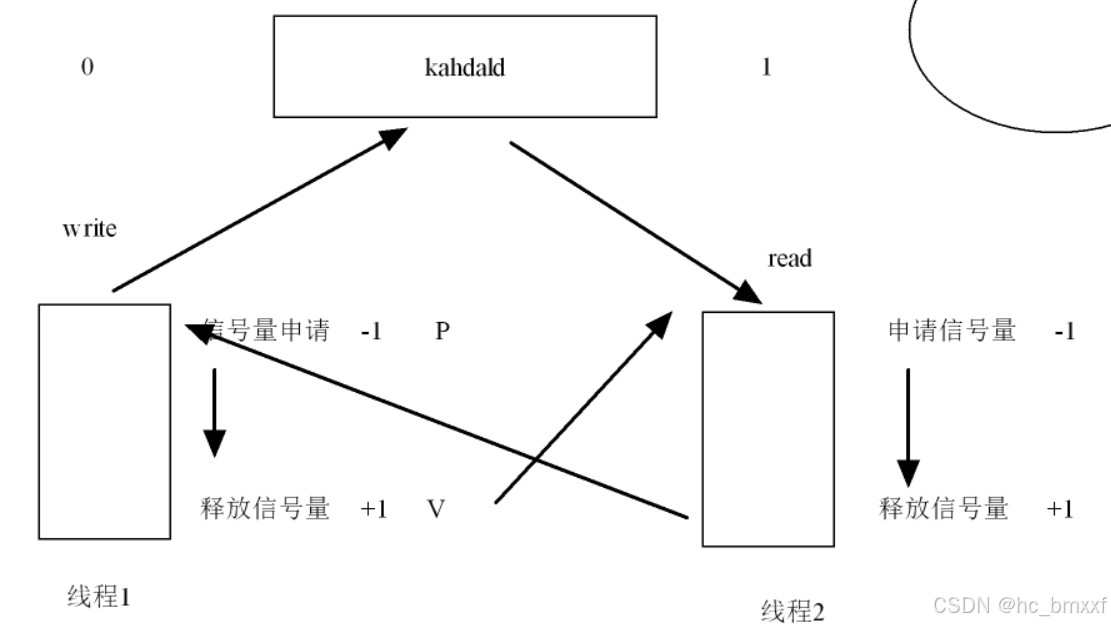
Linux应用软件编程-多任务处理(线程)
线程:轻量级的进程,线程的栈区独立(8M),与同一进程中的其他线程共用进程的堆区,数据区,文本区。 进程是操作系统资源分配的最小单位;线程是cpu任务调度的最小单位。 1. 线程的创建…...

VITUREMEIG | AR眼镜 算力增程
根据IDC发布的《2024年第三季度美国AR/VR市场报告》显示,美国市场AR/VR总出货量增长10.3%。其中,成立于2021年的VITURE增长速度令人惊艳,同比暴涨452.6%,成为历史上增长最快的AR/VR品牌。并在美国AR领域占据了超过50%的市场份额&a…...

Jenkins管理多版本python环境
场景:项目有用到python3.8和3.9,python环境直接安装在jenkins容器内。 1、进入jenkins容器 docker exec -it jenkins /bin/bash 2、安装前置编译环境 # 提前安装,以便接下来的配置操作 apt-get -y install gcc automake autoconf libtool ma…...

Flutter富文本实现学习
Flutter 代码如何实现一个带有富文本显示和交互的页面。 前置知识点学习 RealRichText RealRichText 和 ImageSpan 不是 Flutter 框架中内置的组件,而是自定义的组件或来自第三方库。这些组件的实现可以提供比标准 RichText 更丰富的功能,比如在富文本…...

如何解决 OpenAI API 连接问题:降级 urllib3 版本
如何解决 OpenAI API 连接问题:降级 urllib3 版本 在使用 OpenAI API 时,很多开发者可能会遇到连接问题,特别是在使用 Python 代码与 OpenAI 进行交互时。常见的错误包括 ProxyError、SSLError 和 MaxRetryError,它们通常表示在通…...

【实战指南】登录界面全方位测试策略与案例分析
1. 登录界面测试为什么重要? 登录界面是用户进入系统的第一道门,它的好坏直接影响用户体验和系统安全。想象一下,当你打开一个APP或者网站,第一眼看到的就是登录界面。如果这个界面设计不合理、反应慢、或者经常出错,你…...

5个核心概念理解上下文工程:从Prompt Engineering到Context Engineering的范式转移
5个核心概念理解上下文工程:从Prompt Engineering到Context Engineering的范式转移 【免费下载链接】Awesome-Context-Engineering 🔥 Comprehensive survey on Context Engineering: from prompt engineering to production-grade AI systems. hundred…...

3个技术突破:BiliBiliCCSubtitle开源工具如何实现字幕处理效率优化
3个技术突破:BiliBiliCCSubtitle开源工具如何实现字幕处理效率优化 【免费下载链接】BiliBiliCCSubtitle 一个用于下载B站(哔哩哔哩)CC字幕及转换的工具; 项目地址: https://gitcode.com/gh_mirrors/bi/BiliBiliCCSubtitle 在视频内容快速增长的当下…...

【权威实测】FastAPI 2.0 + streaming-ai-plugin v0.8.2实测吞吐达14,200 RPS:从PyPI下载、wheel编译到uvloop绑定的完整安装流水线
第一章:FastAPI 2.0 streaming-ai-plugin 的技术定位与性能价值FastAPI 2.0 正式引入原生异步流式响应支持(StreamingResponse 重构与 AsyncGenerator 语义强化),配合 streaming-ai-plugin(v1.3)构建的标准…...

WeChatExporter:开源微信聊天记录备份与查看解决方案
WeChatExporter:开源微信聊天记录备份与查看解决方案 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 微信作为日常沟通的重要工具,承载着大量有价…...

3分钟掌握PHP高效IP地址定位技巧:ip2region完全使用指南
3分钟掌握PHP高效IP地址定位技巧:ip2region完全使用指南 【免费下载链接】ip2region PHP版本的离线IP地址定位库 项目地址: https://gitcode.com/gh_mirrors/ip2/ip2region 在当今互联网应用中,IP地址定位是许多业务场景的基础功能,无…...

Phi-4-Reasoning-Vision快速部署:CI/CD自动化测试流水线搭建
Phi-4-Reasoning-Vision快速部署:CI/CD自动化测试流水线搭建 1. 项目概述 Phi-4-Reasoning-Vision是基于微软Phi-4-reasoning-vision-15B多模态大模型开发的高性能推理工具,专为双卡4090环境优化。这个工具严格遵循官方SYSTEM PROMPT规范,支…...
智能体飞书消息渠道接入指南)
第二章:OpenClaw(TsClaw)智能体飞书消息渠道接入指南
注册一个飞书企业 已有企业微信管理员的请跳过此步骤 https://www.feishu.cn/accounts/page/ug_register 注册后,配置企业信息,企业名称填写真实的,或者可以任意填写不做认证 配置飞书开发者应用 步骤一:登录飞书开发者平台&a…...

Stable-Diffusion-v1-5-archive行业落地:教育课件配图、自媒体封面、独立游戏素材生成
Stable Diffusion v1.5 Archive:教育课件、自媒体封面与独立游戏素材的生成利器 1. 引言:一个经典模型,三个创意场景 如果你是一位教育工作者,是否曾为找不到合适的课件配图而烦恼?如果你是一名自媒体创作者…...

3秒破解百度网盘提取码:提升资源获取效率的自动化工具指南
3秒破解百度网盘提取码:提升资源获取效率的自动化工具指南 【免费下载链接】baidupankey 项目地址: https://gitcode.com/gh_mirrors/ba/baidupankey 场景痛点:被提取码困住的数字生活 你是否经历过这样的场景:深夜赶项目时…...