OpenCV相机标定与3D重建(49)将视差图(disparity map)重投影到三维空间中函数reprojectImageTo3D()的使用
- 操作系统:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 编程语言:C++11
算法描述
将视差图像重投影到3D空间。
cv::reprojectImageTo3D 是 OpenCV 库中的一个函数,用于将视差图(disparity map)重投影到三维空间中。这个过程涉及到使用从立体校准过程中获得的 Q 矩阵(也称为 disparity-to-depth 映射矩阵),它能将每个像素的视差值转换为 3D 坐标。
函数原型
void cv::reprojectImageTo3D
(InputArray disparity,OutputArray _3dImage,InputArray Q,bool handleMissingValues = false,int ddepth = -1
)
参数
- 参数disparity:输入的视差图,通常是一个单通道的浮点型或整数类型的图像,表示每个像素处的视差值。
- 参数_3dImage:输出的3D图像,结果是一个三通道的浮点型图像,每个像素包含该位置对应的3D坐标 (X, Y, Z)。
- 参数Q:4x4 的 disparity-to-depth 映射矩阵,用于将视差值转换为3D坐标。此矩阵由 stereoRectify 或其他相关函数生成。
- 参数handleMissingValues:可选参数,指示是否处理缺失值。如果设置为 true,则对于无效的视差值(例如,小于最小视差或大于最大视差的值),输出图像中的相应位置会被填充为特定值(通常是极大值或极小值)。默认值是 false,即不处理缺失值。
- 参数ddepth:可选参数,指定输出图像的深度。可以是 CV_32F(单精度浮点数)或 CV_64F(双精度浮点数)。如果设置为 -1,则输出图像将继承输入图像的深度。
该函数将单通道的视差图转换为一个三通道的图像,表示3D表面。也就是说,对于每个像素 (x, y) 及其对应的视差 d = disparity(x, y),它计算:
[ X Y Z W ] = Q [ x y disparity ( x , y ) z ] . \begin{bmatrix} X \\ Y \\ Z \\ W \end{bmatrix} = Q \begin{bmatrix} x \\ y \\ \texttt{disparity} (x,y) \\ z \end{bmatrix}. XYZW =Q xydisparity(x,y)z .
代码示例
#include <opencv2/opencv.hpp>
#include <iostream>using namespace cv;
using namespace std;int main()
{// 假设我们已经有了视差图和 Q 矩阵Mat disparity = /* 加载或计算得到的视差图 */;Mat Q = (Mat_<double>(4, 4) << /* ... */); // 4x4 disparity-to-depth 映射矩阵// 定义输出的3D图像Mat _3dImage;// 执行重投影reprojectImageTo3D(disparity, _3dImage, Q, true, CV_32F);// 可选:保存或显示结果// imwrite("3d_image.png", _3dImage);cout << "3D Image has been successfully computed." << endl;return 0;
}
相关文章:
将视差图(disparity map)重投影到三维空间中函数reprojectImageTo3D()的使用)
OpenCV相机标定与3D重建(49)将视差图(disparity map)重投影到三维空间中函数reprojectImageTo3D()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 将视差图像重投影到3D空间。 cv::reprojectImageTo3D 是 OpenCV 库中的一个函数,用于将视差图(disparity map)…...
学习HTTP Range
HTTP Range 请求 一种通过指定文件字节范围加载部分数据的技术,广泛用于断点续传、流媒体播放、分布式文件系统的数据分片加载等场景。 请求格式-在请求头中使用 Range 字段指定所需的字节范围 Range: bytes0-1023// bytes0-1023:表示请求文件的第 0 …...

大语言模型训练的数据集从哪里来?
继续上篇文章的内容说说大语言模型预训练的数据集从哪里来以及为什么互联网上的数据已经被耗尽这个说法并不专业,再谈谈大语言模型预训练数据集的优化思路。 1. GPT2使用的数据集是WebText,该数据集大概40GB,由OpenAI创建,主要内…...

Webpack和Vite的区别
一、构建速度方面 webpack默认是将所有模块都统一打包成一个js文件,每次修改都会重写构建整个项目,自上而下串行执行,所以会随着项目规模的增大,导致其构建打包速度会越来越慢 vite只会对修改过的模块进行重构,构建速…...

【再谈设计模式】模板方法模式 - 算法骨架的构建者
一、引言 在软件工程、软件开发过程中,我们经常会遇到一些算法或者业务逻辑具有固定的流程步骤,但其中个别步骤的实现可能会因具体情况而有所不同的情况。模板方法设计模式(Template Method Design Pattern)就为解决这类问题提供了…...

Bytebase 3.1.1 - 可定制的快捷访问首页
🚀 新功能 可定制的快捷访问首页。 支持查询 Redis 集群中所有节点。 赋予项目角色时,过期时间可以定义精确到秒级的时间点。 🔔 重大变更 移除 Database 消息里的实例角色信息。调用 GetInstance 或 ListInstanceRoles 以获取实例角色信息…...

Java阶段四04
第4章-第4节 一、知识点 CSRF、token、JWT 二、目标 理解什么是CSRF攻击以及如何防范 理解什么是token 理解什么是JWT 理解session验证和JWT验证的区别 学会使用JWT 三、内容分析 重点 理解什么是CSRF攻击以及如何防范 理解什么是token 理解什么是JWT 理解session验…...

B2C API安全警示:爬虫之外,潜藏更大风险挑战
在数字化时代,B2C(Business-to-Consumer)电子商务模式已成为企业连接消费者、推动业务增长的重要桥梁。而B2C API(应用程序编程接口)作为企业与消费者之间数据交互的桥梁,其安全性更是至关重要。然而&#…...

OCR文字识别—基于PP-OCR模型实现ONNX C++推理部署
概述 PaddleOCR 是一款基于 PaddlePaddle 深度学习平台的开源 OCR 工具。PP-OCR是PaddleOCR自研的实用的超轻量OCR系统。它是一个两阶段的OCR系统,其中文本检测算法选用DB,文本识别算法选用CRNN,并在检测和识别模块之间添加文本方向分类器&a…...

如何播放视频文件
文章目录 1. 概念介绍2. 使用方法2.1 实现步骤2.2 具体细节3. 示例代码4. 内容总结我们在上一章回中介绍了"如何获取文件类型"相关的内容,本章回中将介绍如何播放视频.闲话休提,让我们一起Talk Flutter吧。 1. 概念介绍 播放视频是我们常用的功能,不过Flutter官方…...

MySQL -- 约束
1. 数据库约束 数据库约束时关系型数据库的一个重要功能,主要的作用是保证数据的有效性,也可以理解为数据的正确性(数据本身是否正确,关联关系是否正确) 人工检查数据的完整性工作量非常大,在数据库中定义一些约束,那么数据在写入数据库的时候,就会帮我们做一些校验.并且约束一…...

php 使用simplexml_load_string转换xml数据格式失败
本文介绍如何使用php函数解析xml数据为数组。 <?php$a <xml><ToUserName><![CDATA[ww8b77afac71336111]]></ToUserName><FromUserName><![CDATA[sys]]></FromUserName><CreateTime>1736328669</CreateTime><Ms…...
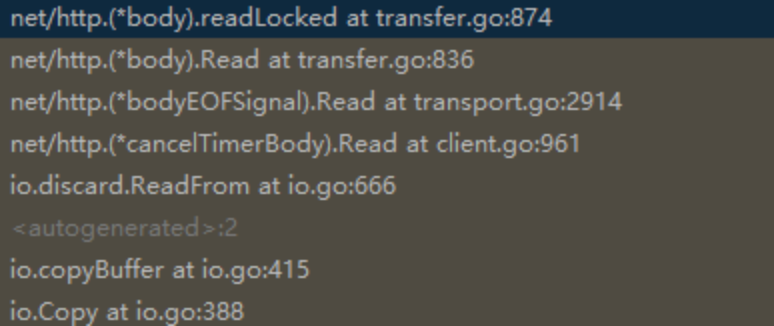
net-http-transport 引发的句柄数(协程)泄漏问题
Reference 关于 Golang 中 http.Response.Body 未读取导致连接复用问题的一点研究https://manishrjain.com/must-close-golang-http-responsehttps://www.reddit.com/r/golang/comments/13fphyz/til_go_response_body_must_be_closed_even_if_you/?rdt35002https://medium.co…...

高级软件工程-复习
高级软件工程复习 坐标国科大,下面是老师说的考试重点。 Ruby编程语言的一些特征需要了解要能读得懂Ruby程序Git的基本命令操作知道Rails的MVC工作机理需要清楚,Model, Controller, View各司什么职责明白BDD的User Story需要会写,SMART要求能…...

eslint.config.js和.eslintrc.js有什么区别
eslint.config.js 和 .eslintrc.js 的主要区别在于它们所对应的 ESLint 版本和配置方法: 1. .eslintrc.js: 这是 ESLint v8 及更早版本使用的配置文件格式。 它使用层级式的配置系统。 现在被称为"旧版"配置格式 。 2. eslint.config.js&am…...

如何使用MVC模式设计和实现校园自助点餐系统的微信小程序
随着智慧校园的普及,校园自助点餐系统在提高学生用餐效率、减轻食堂运营压力方面发挥了重要作用。 在开发这类系统时,MVC(Model-View-Controller)模式是一种非常适合的架构,它将系统的业务逻辑、用户界面和数据交互清晰…...

继续坚持与共勉
经过期末考试后,又要开始学习啦。 当时一直在刷算法题就很少写博客了,现在要继续坚持写博客,将每天对于题的感悟记录下来。 同时我将会在学习Linux操作系统,对于过去学习的内容进行回顾!! 在此ÿ…...
| 补档)
人机交互 | 期末复习(上)| 补档
文章目录 📚1-HCI Introduction🐇人机交互的定义,分别解释人-机-交互的概念🐇six ”mantras“ of UCD🐇Difference between User-Interface (UI) and User-Experience(UX)📚2-HCI history🐇WIMP🐇WYSIWYG📚3-Understanding User🐇Design Thinking Process的…...

Oracle 表分区简介
目录 一. 前置知识1.1 什么是表分区1.2 表分区的优势1.3 表分区的使用条件 二. 表分区的方法2.1 范围分区(Range Partitioning)2.2 列表分区(List Partitioning)2.3 哈希分区(Hash Partitioning)2.4 复合分…...

多并发发短信处理(头条项目-07)
1 pipeline操作 Redis数据库 Redis 的 C/S 架构: 基于客户端-服务端模型以及请求/响应协议的 TCP服务。客户端向服务端发送⼀个查询请求,并监听Socket返回。通常是以 阻塞模式,等待服务端响应。服务端处理命令,并将结果返回给客…...
)
从一次生产事故复盘:我们如何优雅地处理用户上传的‘异常’Excel文件(附Apache POI配置详解)
从生产事故到防御体系:构建Excel文件处理的工程化解决方案那天凌晨2点,我被一阵急促的告警声惊醒。监控系统显示,核心文件处理服务的错误率在10分钟内飙升到35%,大量用户上传的Excel文件无法正常解析。更糟糕的是,部分…...

2026年HR招聘偏好白皮书:这5项附加技能出现频率暴涨
2026 年的招聘市场,正在从“看你会什么岗位技能”,转向“看你能不能把岗位做得更智能”。HR筛简历时,越来越关注候选人的AI应用能力、数据化思维和业务落地能力。人社部近年发布的新职业中,已经出现生成式人工智能系统应用员、人工…...

2026 新视角:化妆品开发的底层逻辑,做好一款产品,从选对原料开始
在化妆品研发链条中,配方架构、生产工艺、包装设计固然重要,但决定一款产品上限的,永远是原料。一款稳定、安全、表现优异的护肤成品,离不开纯净、达标、批次一致的优质原料。对于品牌方、配方师、代工企业而言,原料不…...

机器学习与SHAP在教育公平研究中的应用:精准定位学业困境根源
1. 项目概述:当机器学习遇见教育公平,我们如何精准定位学业困境的根源?在拉丁美洲的教育研究领域,一个长期困扰政策制定者和研究者的核心问题是:究竟是什么因素,在复杂的社会经济背景下,系统性地…...

【MySQL数据库 | 第一篇】 概述
数据库相关概念: 数据库(Database):数据库是指一组有组织的数据的集合,通过计算机程序进行管理和访问。数据库管理系统:操纵和管理数据库的大型软件SQL:操作关系型数据库的编程语言,定义了一套操作关系型数…...
)
Unity事件系统实战:用事件驱动重构你的金币拾取逻辑(告别硬编码)
Unity事件系统实战:用事件驱动重构你的金币拾取逻辑(告别硬编码)在游戏开发中,我们经常会遇到这样的场景:玩家拾取金币后,需要更新UI、播放音效、解锁成就、保存数据……如果把这些逻辑全部写在金币拾取的代…...

OmenSuperHub:释放惠普游戏本性能的纯净开源控制中心
OmenSuperHub:释放惠普游戏本性能的纯净开源控制中心 【免费下载链接】OmenSuperHub Control Omen laptop performance, fan speeds, and keyboard lighting, and unlock power limits. 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 还在为官方…...

Raspberry Pi Debug Probe:RP2040嵌入式开发的调试利器与实战指南
1. 项目概述:为什么你需要一个Raspberry Pi Debug Probe?如果你玩过树莓派Pico或者任何基于RP2040芯片的开发板,肯定遇到过这样的场景:写好的代码,点一下“上传”,然后……就没有然后了。板子上的LED没按你…...

免费抓包工具选型指南:Wireshark、Fiddler、mitmproxy、Charles实战对比
1. 抓包工具不是“黑科技”,而是网络世界的显微镜很多人第一次听说“抓包”,脑子里立刻浮现出黑客电影里满屏滚动的绿色代码、键盘敲得噼啪作响、三秒破解银行防火墙的画面。其实完全不是这样——抓包(Packet Capture)本质上就是把…...

航空发动机叶片三维扫描-诺斯顿
航空发动机叶片作为发动机的核心动力部件,其精度与性能直接决定发动机的推力、燃油效率及运行安全性,三维扫描技术作为航空制造领域的核心数字化手段,已广泛应用于叶片全生命周期的多个关键环节。其应用涵盖叶片研发设计阶段的逆向工程&#…...