32单片机综合应用案例——基于GPS的车辆追踪器(三)(内附详细代码讲解!!!)
困难不会永远存在,只要你勇于面对,坚持努力,就一定能够战胜一切困难。每一次挑战都是一次成长的机会,不要害怕失败,失败是成功之母。只有经历过失败,你才能更加明白自己的不足,并不断改进自己,最终走向成功。不要被别人的眼光束缚,相信自己的能力和潜力,勇敢地去追求自己的梦想。成功需要付出努力和汗水,没有捷径可走,但只要坚持不懈,成功一定会属于你。无论遇到多少困难和阻挠,只要心怀梦想,勇往直前,你一定能够创造属于自己的辉煌。相信自己,努力奋斗,你就能够成为你想成为的人。
目录
技术点详解
1. GPS NMEA协议解析
2. 文件系统操作(如FAT32格式)
3. GSM/GPRS模块配置与使用
4. 地理围栏逻辑实现
5. 加速度传感器数据处理
功能代码示例
完整代码及注释
重要提示:
创建一个基于GPS的车辆追踪器是一个多方面的项目,涉及到硬件选择、软件开发和网络通信。下面我将详细讲解每个技术点,并解释为什么选择这些设备。
技术点详解
1. GPS NMEA协议解析
GPS模块通常通过串行接口发送NMEA(National Marine Electronics Association)0183协议格式的数据。这些数据包含定位信息如时间、纬度、经度、速度等。为了获取实时坐标,我们需要解析这些NMEA句子中的GGA(Global Positioning System Fix Data)或RMC(Recommended Minimum Specific GNSS Data)句子。
为什么选择:
- 标准化协议确保了与大多数GPS接收器的兼容性。
- 提供了必要的位置和时间信息。
2. 文件系统操作(如FAT32格式)
SD卡用于本地存储地理位置数据,它使用FAT32文件系统来组织数据。我们需要实现读写文件的功能,以便保存GPS记录或者日志信息。
为什么选择:
- FAT32是广泛支持的文件系统,几乎可以在所有操作系统上读取。
- SD卡提供了一种经济且可靠的存储方式。
3. GSM/GPRS模块配置与使用
GSM/GPRS模块允许设备通过移动网络发送短信或彩信,并上传数据到云端服务器。这使得即使在没有Wi-Fi的情况下也可以进行远程通信。
为什么选择:
- GSM/GPRS提供了广泛的覆盖范围,适合户外和偏远地区的应用。
- 它可以用来发送短消息服务(SMS)作为紧急通知手段。
4. 地理围栏逻辑实现
地理围栏是一种虚拟边界,当车辆进入或离开这个区域时触发事件。我们可以通过比较当前位置与预设的地理坐标来判断是否越过了围栏。
为什么选择:
- 提高安全性,防止未经授权的车辆移动。
- 可以设置多个围栏,适应不同的应用场景。
5. 加速度传感器数据处理
加速度计能够检测车辆的加速情况,包括碰撞。当发生异常的加速度变化时,我们可以推断出可能发生了事故,并立即发出求救信号。
为什么选择:
- 增强了系统的安全特性,特别是在交通事故中。
- 简单而有效的机制来监测潜在的安全问题。
功能代码示例
以下是一些简化后的功能代码片段。请注意,实际的完整代码会更复杂,并需要根据具体的硬件和库进行调整。
// 初始化GPS模块并开始获取位置 void setupGPS() {// 这里应该有初始化GPS模块的代码 }// 解析GPS数据 void parseGPSData() {// 这里应该有解析NMEA句子的代码 }// 将数据写入SD卡 void writeToFile(String data) {File file = SD.open("log.txt", FILE_WRITE);if (file) {file.println(data);file.close();} }// 发送短信 void sendSMS(String message) {// 这里应该有发送短信的代码 }// 检查是否越过了地理围栏 bool checkGeofence(float lat, float lon) {// 这里应该有检查是否越过地理围栏的逻辑return false; }// 处理加速度计数据 void processAccelData() {// 这里应该有处理加速度数据的代码 }// 主循环 void loop() {String gpsData = getGPSData(); // 获取GPS数据float latitude, longitude; // 解析出来的经纬度parseGPSData(gpsData, &latitude, &longitude);// 写入SD卡或上传至云端writeToFile(gpsData);uploadToCloud(gpsData);// 检查地理围栏if (checkGeofence(latitude, longitude)) {sendSMS("Vehicle has entered/exited geofence!");}// 处理加速度计数据processAccelData(); }
完整代码及注释
编写一个完整的车辆追踪器代码示例,我将基于Arduino平台,并假设使用以下硬件和库:
- GPS模块:例如Neo-6M GPS模块(通过TinyGPS++库解析NMEA句子)
- GSM/GPRS模块:例如SIM800L GSM模块(通过Adafruit FONA库或类似的库进行通信)
- SD卡模块:用于存储数据(通过SDFat库或类似的库操作文件系统)
- 加速度计:例如ADXL345(通过Adafruit_ADXL345库读取数据)
请注意,由于这些库和硬件可能有不同的版本,因此你需要根据实际使用的版本来调整代码。下面的代码是一个简化版的完整实现。
#include <TinyGPS++.h> #include <SoftwareSerial.h> #include <SDFat.h> // 或者使用 SD.h 库 #include <Adafruit_FONA.h> #include <Wire.h> #include <Adafruit_ADXL345_U.h>// 初始化TinyGPS++对象 TinyGPSPlus gps;// 定义GPS串口通信引脚 #define GPSTX 7 #define GPSRX 8 SoftwareSerial ss(GPSRX, GPSTX);// 初始化GSM/GPRS模块 #define FONA_RX 2 #define FONA_TX 3 SoftwareSerial fonaSS = SoftwareSerial(FONA_RX, FONA_TX); Adafruit_FONA fona = Adafruit_FONA(FONA_RX, FONA_TX);// 初始化SD卡芯片选择引脚 #define SD_CS 4 SdFat sd;// 初始化加速度计I2C地址 Adafruit_ADXL345_Unified accel = Adafruit_ADXL345_Unified(12345);// 预设地理围栏坐标 const float geofenceLat = 37.7749; // 示例纬度 const float geofenceLon = -122.4194; // 示例经度 const float geofenceRadius = 0.01; // 半径,单位为度(大约1.11公里)void setup() {Serial.begin(115200);ss.begin(9600); // GPS波特率fonaSS.begin(4800); // GSM波特率// 初始化SD卡if (!sd.begin(SD_CS, SPI_FULL_SPEED)) {Serial.println("SD card initialization failed!");while (1);}// 初始化GSM/GPRS模块if (!fona.begin(fonaSS)) {Serial.println("Couldn't find FONA");while (1);}// 初始化加速度计if (!accel.begin()) {Serial.println("Failed to initialize ADXL345!");while (1);} }void loop() {// 从GPS模块读取数据while (ss.available() > 0) {gps.encode(ss.read());}if (gps.location.isUpdated()) {float latitude = gps.location.lat();float longitude = gps.location.lng();// 记录位置到SD卡recordLocation(latitude, longitude);// 检查是否越过了地理围栏checkGeofence(latitude, longitude);// 处理加速度计数据processAccelData();} }void recordLocation(float lat, float lon) {File dataFile = sd.open("location.txt", FILE_WRITE);if (dataFile) {dataFile.print(millis());dataFile.print(",");dataFile.print(lat, 6);dataFile.print(",");dataFile.println(lon, 6);dataFile.close();} else {Serial.println("Error opening file for writing.");} }bool checkGeofence(float lat, float lon) {float distance = calculateDistance(lat, lon, geofenceLat, geofenceLon);if (distance <= geofenceRadius) {sendSMS("Vehicle has entered/exited geofence!");return true;}return false; }float calculateDistance(float lat1, float lon1, float lat2, float lon2) {// 使用Haversine公式计算两点间的距离const float R = 6371e3; // 地球半径,单位为米float phi1 = lat1 * M_PI / 180;float phi2 = lat2 * M_PI / 180;float deltaPhi = (lat2 - lat1) * M_PI / 180;float deltaLambda = (lon2 - lon1) * M_PI / 180;float a = sin(deltaPhi / 2) * sin(deltaPhi / 2) +cos(phi1) * cos(phi2) *sin(deltaLambda / 2) * sin(deltaLambda / 2);float c = 2 * atan2(sqrt(a), sqrt(1 - a));return R * c / 1000; // 返回距离,单位为千米 }void sendSMS(String message) {if (fona.sendSMS("+1234567890", message.c_str())) { // 替换为你的电话号码Serial.println("SMS sent successfully.");} else {Serial.println("Failed to send SMS.");} }void processAccelData() {sensors_event_t event;accel.getEvent(&event);// 如果检测到异常加速度变化,发送求救信号if (abs(event.acceleration.x) > THRESHOLD || abs(event.acceleration.y) > THRESHOLD || abs(event.acceleration.z) > THRESHOLD) {sendSMS("Emergency! Possible collision detected.");} }
重要提示:
THRESHOLD是您需要定义的一个常量,表示加速度变化的阈值。- 确保所有硬件设备正确连接并且电源稳定。
- 根据实际情况调整代码中的参数,如地理位置、短信接收号码等。
- 上述代码示例并未包含错误处理逻辑和一些优化措施,如减少电池消耗等,在实际项目中应予以考虑。
这个代码示例应该能够帮助你开始构建自己的车辆追踪器。请确保你有适当的技术背景和开发环境设置好,以便测试和调试代码。如果你对特定部分有更多的疑问或者遇到困难,请随时在评论区提问。
相关文章:
(内附详细代码讲解!!!))
32单片机综合应用案例——基于GPS的车辆追踪器(三)(内附详细代码讲解!!!)
困难不会永远存在,只要你勇于面对,坚持努力,就一定能够战胜一切困难。每一次挑战都是一次成长的机会,不要害怕失败,失败是成功之母。只有经历过失败,你才能更加明白自己的不足,并不断改进自己&a…...

45_Lua模块与包
Lua中的模块系统是该语言的一个重要特性,它允许开发者将代码分割成更小、更易于管理的部分。通过使用模块,你可以创建可重用的代码片段,并且可以降低代码间的耦合度。下面我将详细介绍Lua模块的基本概念、语法以及一些实际案例。 1.Lua模块 1.1 模块的基本概念 从Lua 5.1…...

深度学习电影推荐-CNN算法
文章目录 前言视频演示效果1.数据集环境配置安装教程与资源说明1.1 ML-1M 数据集概述1.1.1数据集内容1.1.2. 数据集规模1.1.3. 数据特点1.1.4. 文件格式1.1.5. 应用场景 2.模型架构3.推荐实现3.1 用户数据3.2 电影数据3.3 评分数据3.4 数据预处理3.5实现数据预处理3.6 加载数据…...

【Git 】探索 Git 的魔法——git am 与补丁文件的故事
在日常的开发协作中,你可能会遇到这样的场景:某位热心的小伙伴发来一份 .patch 文件,让你把某个问题修复合并到项目中。如果你不知道如何优雅地接收并应用这份补丁,那么这篇文章就是为你准备的!让我们一起揭开 Git 的“…...

G1原理—5.G1垃圾回收过程之Mixed GC
大纲 1.Mixed GC混合回收是什么 2.YGC可作为Mixed GC的初始标记阶段 3.Mixed GC并发标记算法详解(一) 4.Mixed GC并发标记算法详解(二) 5.Mixed GC并发标记算法详解(三) 6.并发标记的三色标记法 7.三色标记法如何解决错标漏标问题 8.SATB如何解决错标漏标问题 9.重新梳…...

机器人传动力系统介绍
电驱动系统 无框力矩电机减速器:优点是功率密度高,可在有限空间产生大扭矩,使机器人关节运动有力灵活,如人形机器人四肢运动。缺点是系统复杂,成本高,减速器会降低传动效率.空心杯电机行星滚柱丝杆&#x…...
)
1161 Merging Linked Lists (25)
Given two singly linked lists L1a1→a2→⋯→an−1→an and L2b1→b2→⋯→bm−1→bm. If n≥2m, you are supposed to reverse and merge the shorter one into the longer one to obtain a list like a1→a2→bm→a3→a4→bm−1⋯. For ex…...
:在多个文件中共享全局常量)
内联变量(inline variables):在多个文件中共享全局常量
在 C17 中,引入了 内联变量(inline variables) 的概念,可以用于在多个文件中共享全局常量。内联变量允许在头文件中定义变量,而不会导致链接错误(如重复定义)。这种方式非常适合用于定义跨多个文…...
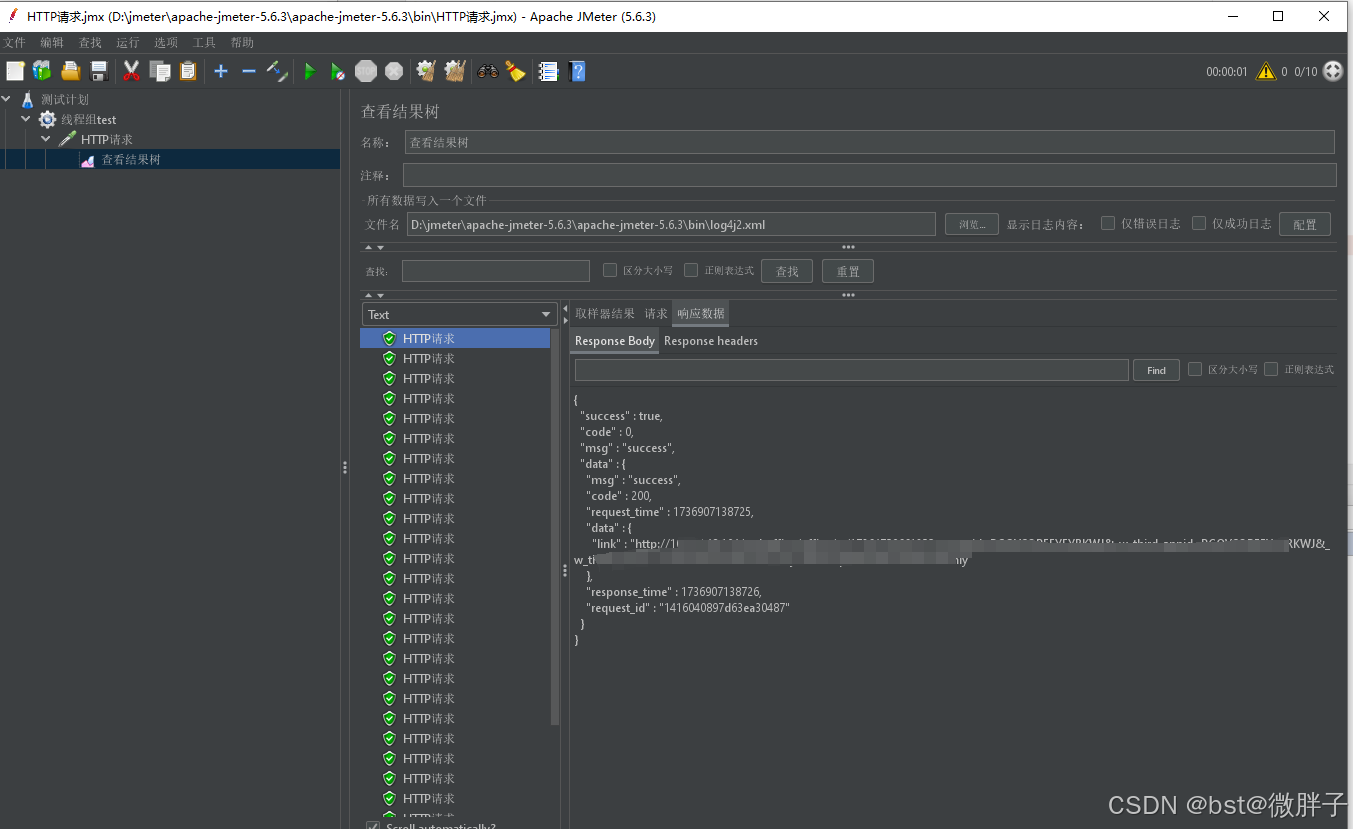
Jmeter进行http接口并发测试
目录: 1、Jmeter设置(1)设置请求并发数(2)设置请求地址以及参数(3)添加结果数 2、启动看结果 1、Jmeter设置 (1)设置请求并发数 (2)设置请求地址…...

力扣解题汇总_JAVA
文章目录 数学_简单13_罗马数字转整数66_ 加一9_回文数70_爬楼梯69_x的平方根509_斐波那契数列2235_两整数相加67_二进制求和415_字符串相加2413_最小偶倍数2469_温度转换704_二分查找(重点) 数组_简单1_两数之和88_合并两个有序数组 链表_简单21_合并两个有序链表203_移除链表…...

ubuntu下安装编译cmake,grpc与protobuf
文章目录 install cmakeinstall grpcinstall protobuf注 install cmake sudo apt-get install -y g make libssl-devcd third_party/cmake-3.17.2./configuresudo make && make installcmake --version install grpc $ sudo apt-get install -y build-essential auto…...
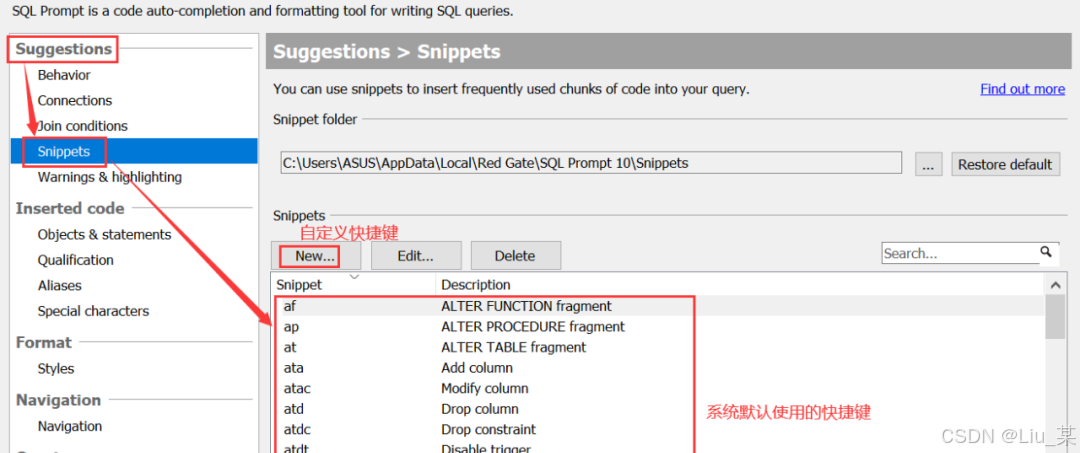
SQL Prompt 插件
SQL Prompt 插件 注:SQL Prompt插件提供智能代码补全、SQL格式化、代码自动提示和快捷输入等功能,非常方便,可以自行去尝试体会。 1、问题 SSMS(SQL Server Management Studio)是SQL Server自带的管理工具,…...
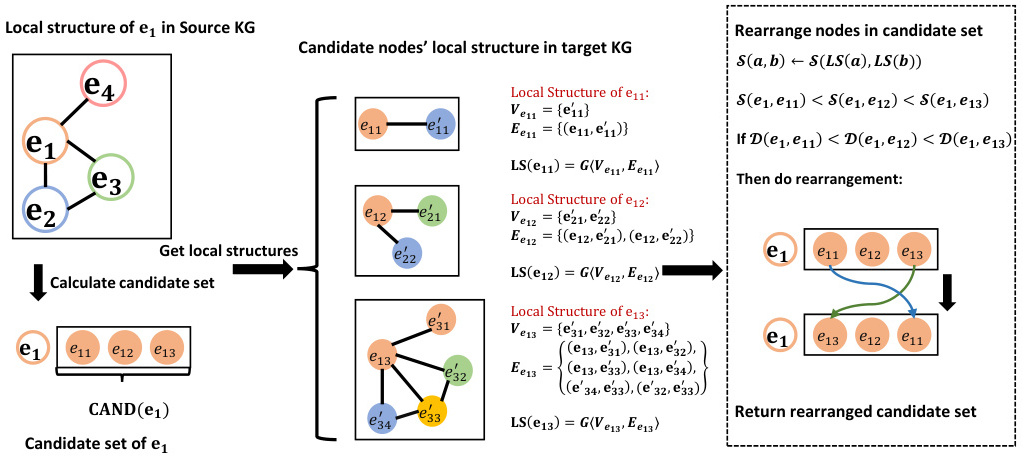
知识图谱抽取分析中,如何做好实体对齐?
在知识图谱抽取分析中,实体对齐是将不同知识图谱中的相同实体映射到同一表示空间的关键步骤。为了做好实体对齐,可以参考以下方法和策略: 基于表示学习的方法: 使用知识图谱嵌入技术,如TransE、GCN等,将实体…...

【Python通过UDP协议传输视频数据】(界面识别)
提示:界面识别项目 前言 随着网络通信技术的发展,视频数据的实时传输在各种场景中得到了广泛应用。UDP(User Datagram Protocol)作为一种无连接的协议,凭借其低延迟、高效率的特性,在实时性要求较高的视频…...
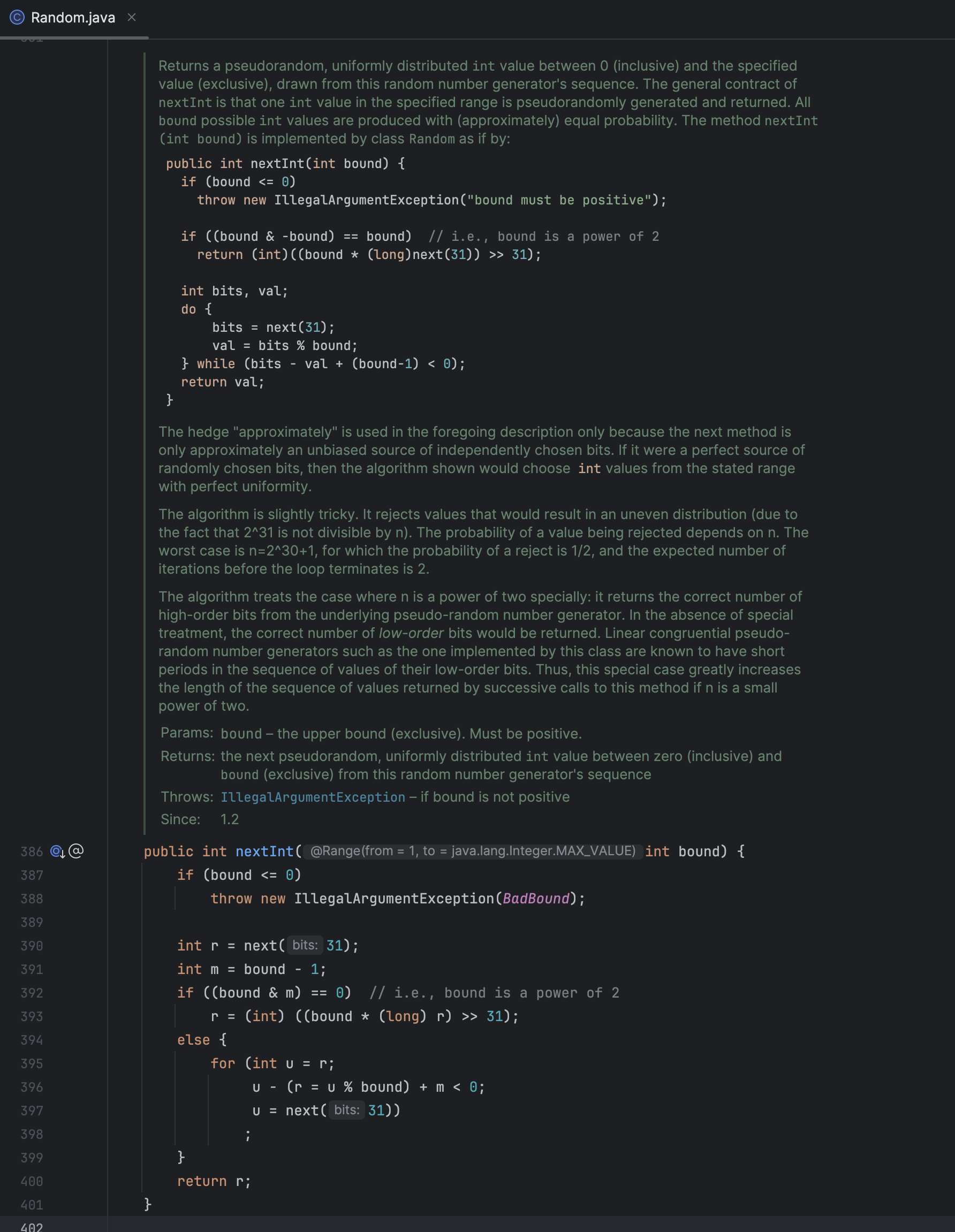
【伪随机数】关于排序算法自测如何生成随机数而引发的……
以 Random 开始 可能一开始,你只是写到了排序算法如何生成随机数 public static void main(String[] args) {Random random new Random();int[] nums new int[10];for (int i 0; i < nums.length; i) {nums[i] random.nextInt(100);}System.out.println(&q…...
是一种非参数统计方法)
核密度估计(Kernel Density Estimation, KDE)是一种非参数统计方法
一、核密度估计 核密度估计(Kernel Density Estimation, KDE)是一种非参数统计方法,用于估计随机变量的概率密度函数。它通过将每个数据点周围的核函数叠加,生成平滑的密度曲线。以下是其核心要点: 1. 基本概念 非参…...

【k8s面试题2025】2、练气初期
在练气初期,灵气还比较稀薄,只能勉强在体内运转几个周天。 文章目录 简述k8s静态pod为 Kubernetes 集群移除新节点:为 K8s 集群添加新节点Kubernetes 中 Pod 的调度流程 简述k8s静态pod 定义 静态Pod是一种特殊类型的Pod,它是由ku…...

栈溢出原理
文章目录 前言一、基本示例二、分析栈1. 先不考虑gets函数的栈情况2. 分析gets函数的栈区情况 三、利用栈1. 构造字符串2. 利用漏洞 前言 栈溢出指的是程序向栈中某个变量中写入的字节数超过了这个变量本身所申请的字节数,因而导致与其相邻的栈中的变量的值被改变。…...

Jmeter如何进行多服务器远程测试
🍅 点击文末小卡片 ,免费获取软件测试全套资料,资料在手,涨薪更快 JMeter是Apache软件基金会的开源项目,主要来做功能和性能测试,用Java编写。 我们一般都会用JMeter在本地进行测试,但是受到单…...

2.slf4j入口
文章目录 一、故事引入二、原理探究三、SLF4JServiceProvider四、总结 一、故事引入 故事要从下面这段代码说起 public class App {private static final Logger logger LoggerFactory.getLogger(App.class);public static void main( String[] args ) throws Exception {lo…...

BurpSuite 2025插件开发JDK版本兼容性实战指南
1. 为什么BurpSuite插件开发环境总在JDK版本上翻车?你是不是也经历过:下载好BurpSuite最新版2025.4,兴冲冲打开插件开发文档,照着官方示例写完第一个HelloWorld插件,一编译——java.lang.UnsupportedClassVersionError…...

账务台账数据
银行里说的 “账务台账数据”,本质就是按会计规则把每笔业务逐笔、分户、分科目记下来的完整明细流水 余额 辅助信息,核心是 “可逐笔追溯、可对账、可审计” 的一套明细数据。下面用通俗、具体的方式拆开说:一、银行 “账务台账” 到底是什…...
)
Postgresql基础实践教程(九)
⭐️⭐️⭐️⭐️⭐️ 完整数据详见 练习数据免费 ⭐️⭐️⭐️⭐️⭐️ 七十二、WITH查询(公用表表达式CTE) 1. SELECT 中的 WITH 2. 递归查询 3. 公用表表达式的物化 4. WITH中的数据修改语句 WITH提供了一种在主查询中写辅助语句的方法。这些语…...

巨量投放总结
巨量商务管理平台 : https://business.oceanengine.com 巨量广告投放平台: https://ad.oceanengine.com 商务管理平台 账户 广告组 计划 广告投放平台 层级关系: 广告组 -> 计划 -> 创意 对应FB: 系列 - > 广告组 -> 广告...

告别DLL缺失烦恼!Visual C++运行库合集一键搞定Windows应用依赖问题
告别DLL缺失烦恼!Visual C运行库合集一键搞定Windows应用依赖问题 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经在打开某个软件或游戏时…...

操作符从浅入深的讲解
1. 操作符的分类 2. ⼆进制和进制转换 3. 原码、反码、补码 4. 移位操作符 5. 位操作符:&、|、^、~ 6. 单⽬操作符 7. 逗号表达式 8. 下标访问[]、函数调⽤() 9. 结构成员访问操作符 10. 操作符的属性:优先级、结合性 11. 表达式求值1.操作符的分类以…...

Arduino ADC自检:用RC电路诊断模数转换器故障
1. 项目概述:当你的体重秤开始“说谎”你有没有遇到过这样的情况:站上家里的电子体重秤,屏幕上跳出来的数字让你瞬间怀疑人生?要么是轻得离谱,要么是重得吓人,更诡异的是,它可能只在两个固定的、…...

XZ1018,100V,40A,NMOS 封装:TO252
封装:TO252类型:NVDS:100V VGS: 20V ID:40ARDS(ON):10V <14mΩRDS(ON):4.5V <19mΩ型号: XZ1018 封装:TO252类型…...

模拟电路实现自主循线机器人:无MCU的硬件逻辑设计
1. 项目概述:用最纯粹的模拟电路,造一台会“思考”的机器人每次看到那些在赛道上灵巧穿梭的循线小车,你是不是也手痒,想自己动手做一个?但一听到“单片机”、“编程”、“Arduino”这些词,又觉得门槛太高&a…...

DLA功耗优化验证:tegrastats实战指南
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...