【数据结构进阶】红黑树超详解 + 实现(附源码)

🌟🌟作者主页:ephemerals__
🌟🌟所属专栏:数据结构
目录
前言
一、红黑树介绍
二、红黑树原理详解
三、红黑树的实现
1. 节点定义
2. 红黑树类型定义及接口声明
3. 红黑树的插入(重点)
颜色设置
平衡调整
总代码
4. 红黑树的查找
5. 中序遍历、拷贝构造和析构
6. 检查红黑树是否合法
7. 程序全部代码
总结
前言
在传统二叉搜索树的基础上,我们学习了AVL树,它通过独特的平衡机制,确保了稳定高效的插入、查找和删除操作。然而,由于其频繁的平衡调整,可能使性能收到一定影响。因此,另一种自平衡二叉搜索树——红黑树应运而生。本篇文章,我们将深入探讨红黑树的实现原理,带你解开其简洁而深邃的设计之美。
与AVL树相同,之后的红黑树实现当中,我们会将键值对(pair)作为节点数据域。
如果你不是很了解二叉搜索树、AVL树或pair,可以参阅这两篇文章:
【数据结构】二叉搜索树(二叉排序树)-CSDN博客
【数据结构进阶】AVL树深度剖析 + 实现(附源码)-CSDN博客
注:若无特殊说明,本文所提到的所有“路径”都指根节点到NULL的路径。
一、红黑树介绍
红黑树(Red-Black-Tree)是一种自平衡二叉搜索树,但它并非像AVL树那样“严格平衡”,而是允许一定的不平衡存在,在保证增删查改效率没有太大影响的情况下,显著减少了平衡调整的次数,提升总体效率。
AVL树一般通过节点的“平衡因子”来维持平衡,而红黑树通过给节点“着色”,确保其高效性。
在非空情况下,红黑树的性质(约束条件)如下:
1. 它是一棵二叉搜索树
2. 每一个节点都会被着色,不是黑色就是红色
3. 根节点必须为黑色
4. 对于一个红色节点,它的孩子或为空,或是黑色。也就是说路径上不能有连续红色节点
5. 从根节点到NULL节点的所有路径上,黑色节点的数量都相同
有了以上约束条件,就可确保其没有一条路径长度能够超出其他路径的2倍,从而保证高效操作。

如上图,每一条路径上都有相同数量的黑色节点。
二、红黑树原理详解
那么,红黑树为什么能够控制路径长度呢?
来看一个极端情况:
假设一棵红黑树的一条路径上有n个黑色节点,那么由于其所有路径上的黑色节点数量是相同的,所以其所有路径上都一定有n个黑色节点。对于这棵树,最长的可能路径上的节点就是一黑一红一黑一红(要确保无连续红色节点)......一共有2n个节点;最短的可能路径上的节点是全黑的,一共有n个节点。那么其他可能的路径长度都在n~2n之间。所以说没有一条路径长度能够超出其他路径长度的两倍,也就确保了根节点左右子树的高度比一定在1~2之间。

接下来,我们分析一下红黑树的效率。
设一棵红黑树一共有N个节点,它的最短可能路径的长度为h,由于可能的路径长度都在h~2h之间,那么节点数N就满足 。由此可知,在路径最短情况下,其进行增删查改的时间消耗为O(logN);路径最长情况下,进行查找的时间消耗为O(2logN)。因此红黑树增删查改的时间复杂度为O(logN)。

红黑树的平衡控制相对AVL树较为抽象,但由于那几点约束条件,控制了最长路径和最短路径之比,间接地使红黑树达到了“近似平衡”,增删查改地时间消耗不会过大,并且相比AVL树,旋转调整次数会更少。
三、红黑树的实现
1. 节点定义
红黑树节点及其颜色定义如下:
enum Color//枚举值表示颜色
{RED,BLACK
};//节点
template<class K, class V>
struct RBTreeNode
{pair<K, V> _kv;//数据域RBTreeNode<K, V>* _left;//指向左孩子的指针RBTreeNode<K, V>* _right;//指向右孩子的指针RBTreeNode<K, V>* _parent;//指向父亲的指针Color _col;//颜色RBTreeNode(const pair<K, V>& kv)//节点构造:_kv(kv), _left(nullptr), _right(nullptr), _parent(nullptr){}
};与AVL树相同,红黑树也采用三叉链表结构,更有利于节点之间的控制访问。
在节点构造当中,我们并没有设置节点的初始颜色,之后在实现节点插入的实现当中,我们会重点讨论初始颜色的问题。
2. 红黑树类型定义及接口声明
我们需要实现的接口如下:
//红黑树类
template<class K, class V>
class RBTree
{typedef RBTreeNode<K, V> Node;
public://强制生成无参构造RBTree() = default;//拷贝构造RBTree(const RBTree<K, V>& t);//析构函数~RBTree();//插入bool Insert(const pair<K, V>& kv);//查找Node* Find(const K& key);//中序遍历void Inorder();//判断是否为合法红黑树bool IsValidRBTree();
private:Node* _root = nullptr;//根节点指针
};3. 红黑树的插入(重点)
为了保持红黑树增删查改的高效性,插入操作要保证满足红黑树的性质。
红黑树的插入过程大致如下:
1. 首先按照二叉搜索树的插入规则确定插入节点的位置。
2. 插入新节点,并确定新节点的颜色。
3. 为保持红黑树的性质,需要对原有树结构进行平衡调整。
颜色设置
我们首先来探讨新节点的颜色设置问题。
如果新插入的节点是根节点(树为空),毋庸置疑,为黑色。并且此时整个结构已经满足红黑树性质,插入完成。
如果新插入的节点不是根节点,那么能否设置初始颜色为黑色呢?我们假设新插入的节点为黑色:

不难发现,插入节点4之后,已经不满足红黑树性质:5->2->4->NULL这条路径上有3个黑色节点,而5->7->6->NULL这条路径上有2个黑色节点。实际上,如果插入黑色节点,不管插入到什么位置,该条路径上的黑色节点数都会增加,而其他路径上的黑色节点数不变,此时一定会违反红黑树的约束条件。
那么,我们插入一个红色节点:

此时可以看到,插入之后,整个结构依然满足红黑树的性质。当然,这是因为节点2是黑色节点,此时插入结束。若一个红色节点插入在红色节点的下方,出现连续红色节点,那么也会违反约束条件。
总之,若插入黑色节点,一定违反红黑树规则,而插入红色节点,可能违反红黑树规则。所以我们退而求其次,将新节点(除根节点外)设置为红色。
平衡调整
确定了新节点颜色之后,我们探讨平衡调整的问题。
之前已经提到,我们如果将新节点插入在红色节点的下方,就需要进行平衡调整。有两种情况需要分别讨论。

情况1:仅变色

如上图所示, parent和uncle都是红色,grandfather为黑色,此时插入新节点cur,出现连续红色节点。这种情况下,将parent和uncle变黑,grandfather变红,整个结构就满足了红黑树的性质。
但上图是一种具体情况,如果整棵树是另一棵树的子树,且节点4是红色的,那么变色之后就会再次出现连续的红色节点(节点2和节点4),此时就需要继续向上调整:将grandfather作为新的cur,然后找到新的parent和uncle,进行变色或做其他调整(之后会讲解),然后再向上检查,直到遇到根节点或者无连续红色节点为止。
通过观察上图,不难发现:针对需要进行平衡调整的情况,新节点插入之后,parent一定为红,否则无需调整;grandfather一定为黑,否则未插入节点时就已经出现连续红色节点,红黑树原本就有问题。 那么,重要变量就是uncle节点。
总结:当uncle为红时,仅需变色:将parent和uncle变黑,grandfather变红。然后将grandfather作为新的cur,找到新的parent和uncle,继续判断、调整,直到遇到根节点或无连续红色节点。
情况2:旋转+变色
刚才提到uncle是重要变量,那么我们就给出uncle的其他可能情况(不存在或为黑),进而分析各种调整场景。
分类讨论之前,我们首先需要明确需要进行平衡调整的情况下,uncle和cur的关系。
一个节点被标记为cur(确定插入位置之后),仅有两种情况:
1. 它是新增节点;2. 它是场景1向上调整时标记的节点。
当uncle不存在时,cur一定是新增节点。原因:若cur不是新增节点,则其必然是向上调整时标记的节点,那么一定发生了变色,也就是说cur所在的某条路径A上至少有两个黑色节点(包括一个根节点)。而uncle不存在,则从根节点到uncle(NULL)位置的路径上的黑色节点数一定少于路径A,两条路径黑色节点数量不一致,不满足红黑树性质。
当uncle为黑时,cur一定时向上调整时标记的节点。原因:uncle为黑,则从根节点到uncle的路径B上至少有两个黑色节点。如果cur是新增节点,那么从根节点到cur的路径上的黑色节点数一定少于路径B,两条路径黑色节点数量不一致,不满足红黑树性质。
uncle不存在:

这种情况下,如果只是改变parent和grandfather的颜色,并不能解决问题:变色之后路径4->2->1->NULL上有1个黑色节点,而路径4->NULL上没有黑色节点,不满足红黑树性质。
此时就要配合旋转操作来解决问题。根据三个节点的相对位置,需要我们分情况进行单旋或双旋,从而调整树的结构:
单旋+变色:

可以看到,我们以grandfather为旋转点,进行右/左单旋,然后将parent变黑,grandfather变红,整个结构满足红黑树性质,并且该部分的根已经变成黑色,无需继续向上调整,插入结束。
双旋+变色:

双旋完成后,将cur变黑,grandfather变红,整个结构满足红黑树,并且该部分的根已经变成黑色,无需继续向上调整,插入结束。
总结:当uncle不存在时,需要根据实际情况进行旋转+变色。单旋完成后要将parent变黑,grandfather变红;双旋完成后要将cur变黑,grandfather变红。操作结束后,该部分的根成为黑色,不会出现连续红色节点,无需再向上调整。
uncle为黑:
刚才已经提到,uncle为黑时,cur一定是向上调整时标记的节点。所以我们使用抽象图来表示插入状况:

如图所示, a、b、c、d、e分别表示相应黑色节点数量的子树,当a、b的黑色节点数由n-1变为n时,说明发生了变色,使得cur变为红色。此时由于uncle是黑色,如果直接将parent变黑,grandfather变红,那么根节点到a、b、c路径上的黑色节点数与到d、e的路径不相等,不满足红黑树的性质。所以要以grandfather为旋转点,分情况进行旋转再变色。
不难发现,uncle为黑时的旋转、变色逻辑与uncle不存在时完全相同,这里博主就不再一一列举各种旋转情况。总结:当uncle为黑时,需要根据实际情况进行旋转+变色。单旋完成后要将parent变黑,grandfather变红;双旋完成后要将cur变黑,grandfather变红。操作结束后,该部分的根成为黑色,不会出现连续红色节点,无需再向上调整。
注意:平衡调整完成之后,整棵树的根节点可能变为红色。所以平衡调整结束后,一定要将根节点设置为黑色。
红黑树插入的总体过程:

总代码
红黑树插入代码实现:
//插入
bool Insert(const pair<K, V>& kv)
{if (_root == nullptr)//树为空,直接插入{_root = new Node(kv);_root->_col = BLACK;return true;}//先查找合适的插入位置Node* parent = nullptr;Node* cur = _root;while (cur){if (kv.first < cur->_kv.first){parent = cur;cur = cur->_left;}else if (kv.first > cur->_kv.first){parent = cur;cur = cur->_right;}else{return false;}}cur = new Node(kv);cur->_col = RED;//插入红色节点if (kv.first < parent->_kv.first){parent->_left = cur;}else{parent->_right = cur;}cur->_parent = parent;//parent为红,进行平衡调整while (parent && parent->_col == RED){//确定grandfatherNode* grandfather = parent->_parent;if (parent == grandfather->_left){//确定uncleNode* uncle = grandfather->_right;if (uncle && uncle->_col == RED)//uncle为红,仅变色{parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续向上判断cur = grandfather;parent = cur->_parent;}else//uncle为黑或不存在,旋转+变色{if (cur == parent->_left)//右单旋{RotateR(grandfather);//变色parent->_col = BLACK;grandfather->_col = RED;}else//左右双旋{RotateL(parent);RotateR(grandfather);//变色cur->_col = BLACK;grandfather->_col = RED;}break;//旋转完成,直接跳出循环}}else{//确定uncleNode* uncle = grandfather->_left;if (uncle && uncle->_col == RED)//uncle为红,仅变色{parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续向上判断cur = grandfather;parent = cur->_parent;}else//uncle为黑或不存在,旋转+变色{if (cur == parent->_right)//左单旋{RotateL(grandfather);//变色parent->_col = BLACK;grandfather->_col = RED;}else//右左双旋{RotateR(parent);RotateL(grandfather);//变色cur->_col = BLACK;grandfather->_col = RED;}break;//旋转完成,直接跳出循环}}}//最后将根节点设置为黑色_root->_col = BLACK;return true;
}//右单旋
void RotateR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR) subLR->_parent = parent;Node* ppNode = parent->_parent;subL->_right = parent;parent->_parent = subL;if (parent == _root){_root = subL;subL->_parent = nullptr;}else{if (ppNode->_left == parent) ppNode->_left = subL;else ppNode->_right = subL;subL->_parent = ppNode;}
}//左单旋
void RotateL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL) subRL->_parent = parent;Node* ppNode = parent->_parent;subR->_left = parent;parent->_parent = subR;if (parent == _root){_root = subR;subR->_parent = nullptr;}else{if (ppNode->_left == parent) ppNode->_left = subR;else ppNode->_right = subR;subR->_parent = ppNode;}
}4. 红黑树的查找
红黑树的查找逻辑与传统二叉搜索树相同,注意按照键查找。
代码如下:
//查找
Node* Find(const K& key)
{Node* cur = _root;while (cur){if (key < cur->_kv.first){cur = cur->_left;//小了往左走}else if (key > cur->_kv.first){cur = cur->_right;//大了往右走}else{return cur;//找到了,返回}}return nullptr;//没找到,返回空指针
}5. 中序遍历、拷贝构造和析构
三个函数的实现逻辑与AVL树完全相同。注意拷贝时不要忘记parent指针。
代码如下:
//中序遍历
void Inorder()
{_Inorder(_root);
}
void _Inorder(Node* root)
{if (root == nullptr) return;_Inorder(root->_left);cout << root->_kv.first << ' ' << root->_kv.second << endl;_Inorder(root->_right);
}//拷贝构造
RBTree(const RBTree<K, V>& t)
{_root = _Copy(t._root);
}
Node* _Copy(Node* root, Node* parent = nullptr)
{if (root == nullptr) return nullptr;Node* NewRoot = new Node(root->_kv);NewRoot->_col = root->_col;//复制颜色NewRoot->_parent = parent;//设置父指针//递归拷贝左子树和右子树NewRoot->_left = _Copy(root->_left, NewRoot);NewRoot->_right = _Copy(root->_right, NewRoot);return NewRoot;
}//析构函数
~RBTree()
{_Destroy(_root);
}
void _Destroy(Node* root)
{if (root == nullptr) return;_Destroy(root->_left);_Destroy(root->_right);delete root;
}6. 检查红黑树是否合法
判断一棵红黑树是否合法,就要判断它是否满足红黑树的性质。可以从以下几点入手:
1. 检查根节点是否为黑色。
2. 当一个节点为红色时,判断其父亲是否是黑色。
3. 检查各个路径上的黑色节点数是否相等。
对于第三点,可以先遍历一条路径(可以选择走最左路径,避免递归),记录路径上的黑色节点个数,然后再判断其他所有路径上的黑色节点个数是否与之一致。
代码实现:
//判断是否为合法红黑树
bool IsValidRBTree()
{//空树,合法if (_root == nullptr) return true;//根节点为红,非法if (_root->_col == RED){cout << "根节点为红" << endl;return false;}int refNum = 0;//记录黑色节点个数Node* cur = _root;while (cur){if (cur->_col == BLACK) refNum++;cur = cur->_left;}//递归检查所有路径return _Check(_root, 0, refNum);
}//路径检查
bool _Check(Node* root, int num, const int refNum)
{if (root == nullptr){//遍历到空,进行黑色节点比较if (num != refNum){cout << "黑色节点数量不相等" << endl;return false;}return true;}//检查是否有连续红色节点if (root->_col == RED && root->_parent->_col == RED){cout << "有连续红色节点" << endl;return false;}//记录当前路径的黑色节点数if (root->_col == BLACK) num++;//递归检查左子树和右子树return _Check(root->_left, num, refNum) && _Check(root->_right, num, refNum);
}接下来我们写一段代码,插入一组数据,验证红黑树的合法性:
int main()
{RBTree<int, int> t;int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };for (auto& e : a){t.Insert({ e,e });}t.Inorder();cout << t.IsValidRBTree() << endl;return 0;
}运行结果:

7. 程序全部代码
红黑树实现全部代码如下:
#include <iostream>
#include <utility>
using namespace std;enum Color//枚举值表示颜色
{RED,BLACK
};//节点
template<class K, class V>
struct RBTreeNode
{pair<K, V> _kv;//数据域RBTreeNode<K, V>* _left;//指向左孩子的指针RBTreeNode<K, V>* _right;//指向右孩子的指针RBTreeNode<K, V>* _parent;//指向父亲的指针Color _col;//颜色RBTreeNode(const pair<K, V>& kv)//节点构造:_kv(kv), _left(nullptr), _right(nullptr), _parent(nullptr), _col(RED){}
};//红黑树类
template<class K, class V>
class RBTree
{typedef RBTreeNode<K, V> Node;
public://强制生成无参构造RBTree() = default;//拷贝构造RBTree(const RBTree<K, V>& t){_root = _Copy(t._root);}//析构函数~RBTree(){_Destroy(_root);}//插入bool Insert(const pair<K, V>& kv){if (_root == nullptr)//树为空,直接插入{_root = new Node(kv);_root->_col = BLACK;return true;}//先查找合适的插入位置Node* parent = nullptr;Node* cur = _root;while (cur){if (kv.first < cur->_kv.first){parent = cur;cur = cur->_left;}else if (kv.first > cur->_kv.first){parent = cur;cur = cur->_right;}else{return false;}}cur = new Node(kv);if (kv.first < parent->_kv.first){parent->_left = cur;}else{parent->_right = cur;}cur->_parent = parent;//parent为红,进行平衡调整while (parent && parent->_col == RED){//确定grandfatherNode* grandfather = parent->_parent;if (parent == grandfather->_left){//确定uncleNode* uncle = grandfather->_right;if (uncle && uncle->_col == RED)//uncle为红,仅变色{parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续向上判断cur = grandfather;parent = cur->_parent;}else//uncle为黑或不存在,旋转+变色{if (cur == parent->_left)//右单旋{RotateR(grandfather);//变色parent->_col = BLACK;grandfather->_col = RED;}else//左右双旋{RotateL(parent);RotateR(grandfather);//变色cur->_col = BLACK;grandfather->_col = RED;}break;//旋转完成,直接跳出循环}}else{//确定uncleNode* uncle = grandfather->_left;if (uncle && uncle->_col == RED)//uncle为红,仅变色{parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续向上判断cur = grandfather;parent = cur->_parent;}else//uncle为黑或不存在,旋转+变色{if (cur == parent->_right)//左单旋{RotateL(grandfather);//变色parent->_col = BLACK;grandfather->_col = RED;}else//右左双旋{RotateR(parent);RotateL(grandfather);//变色cur->_col = BLACK;grandfather->_col = RED;}break;//旋转完成,直接跳出循环}}}//最后将根节点设置为黑色_root->_col = BLACK;return true;}//查找Node* Find(const K& key){Node* cur = _root;while (cur){if (key < cur->_kv.first){cur = cur->_left;//小了往左走}else if (key > cur->_kv.first){cur = cur->_right;//大了往右走}else{return cur;//找到了,返回}}return nullptr;//没找到,返回空指针}//中序遍历void Inorder(){_Inorder(_root);}//判断是否为合法红黑树bool IsValidRBTree(){//空树,合法if (_root == nullptr) return true;//根节点为红,非法if (_root->_col == RED){cout << "根节点为红" << endl;return false;}int refNum = 0;//记录黑色节点个数Node* cur = _root;while (cur){if (cur->_col == BLACK) refNum++;cur = cur->_left;}//递归检查所有路径return _Check(_root, 0, refNum);}
private://右单旋void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR) subLR->_parent = parent;Node* ppNode = parent->_parent;subL->_right = parent;parent->_parent = subL;if (parent == _root){_root = subL;subL->_parent = nullptr;}else{if (ppNode->_left == parent) ppNode->_left = subL;else ppNode->_right = subL;subL->_parent = ppNode;}}//左单旋void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL) subRL->_parent = parent;Node* ppNode = parent->_parent;subR->_left = parent;parent->_parent = subR;if (parent == _root){_root = subR;subR->_parent = nullptr;}else{if (ppNode->_left == parent) ppNode->_left = subR;else ppNode->_right = subR;subR->_parent = ppNode;}}//中序遍历void _Inorder(Node* root){if (root == nullptr) return;_Inorder(root->_left);cout << root->_kv.first << ' ' << root->_kv.second << endl;_Inorder(root->_right);}//拷贝构造Node* _Copy(Node* root, Node* parent = nullptr){if (root == nullptr) return nullptr;Node* NewRoot = new Node(root->_kv);NewRoot->_col = root->_col;//复制颜色NewRoot->_parent = parent;//设置父指针//递归拷贝左子树和右子树NewRoot->_left = _Copy(root->_left, NewRoot);NewRoot->_right = _Copy(root->_right, NewRoot);return NewRoot;}//销毁void _Destroy(Node* root){if (root == nullptr) return;_Destroy(root->_left);_Destroy(root->_right);delete root;}//路径检查bool _Check(Node* root, int num, const int refNum){if (root == nullptr){//遍历到空,进行黑色节点比较if (num != refNum){cout << "黑色节点数量不相等" << endl;return false;}return true;}//检查是否有连续红色节点if (root->_col == RED && root->_parent->_col == RED){cout << "有连续红色节点" << endl;return false;}//记录当前路径的黑色节点数if (root->_col == BLACK) num++;//递归检查左子树和右子树return _Check(root->_left, num, refNum) && _Check(root->_right, num, refNum);}Node* _root = nullptr;//根节点指针
};int main()
{RBTree<int, int> t;int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };for (auto& e : a){t.Insert({ e,e });}t.Inorder();cout << t.IsValidRBTree() << endl;return 0;
}总结
红黑树通过引入节点颜色和一系列平衡规则,在保持高效查询性能的同时,优化了插入和删除操作的复杂度。与AVL树相比,红黑树对平衡的要求较为宽松,避免了频繁的旋转调整,从而提升了动态操作的效率。尽管红黑树的结构较为复杂,但它通过颜色标记、旋转操作以及路径黑色节点数量的控制,成功实现了查找、插入和删除操作的平衡。在实际应用中,红黑树被广泛用于操作系统、数据库等领域,发挥着其重要的作用。如果你觉得博主讲的还不错,就请留下一个小小的赞在走哦,感谢大家的支持❤❤❤
相关文章:
【数据结构进阶】红黑树超详解 + 实现(附源码)
🌟🌟作者主页:ephemerals__ 🌟🌟所属专栏:数据结构 目录 前言 一、红黑树介绍 二、红黑树原理详解 三、红黑树的实现 1. 节点定义 2. 红黑树类型定义及接口声明 3. 红黑树的插入(重点&a…...

leetcode_3092. 最高频率的 ID
https://leetcode.cn/problems/most-frequent-ids/description/ 看到这个数据范围 最极端情况 如果nums全为一个数 并且数量取到最大 那么范围是10的10次方 需要longlong储存 这题主要运用了哈希表配合multiset实现 哈希表主要用作存储某个数的出现次数 mst则用于记录出现次…...

鸿蒙仓颉环境配置(仓颉SDK下载,仓颉VsCode开发环境配置,仓颉DevEco开发环境配置)
目录 1)仓颉的SDK下载 1--进入仓颉的官网 2--点击图片中的下载按钮 3--在新跳转的页面点击即刻下载 4--下载 5--找到你们自己下载好的地方 6--解压软件 2)仓颉编程环境配置 1--找到自己的根目录 2--进入命令行窗口 3--输入 envsetup.bat 4--验证是否安…...

数据统计–图形报表(day11)
Apache ECharts 介绍 Apache ECharts 介绍 Apache ECharts 是一款基于 Javascript 的数据可视化图表库,提供直观,生动,可交互,可个性化定制的数据可视化图表。 官网地址:Apache ECharts 入门案例 Apache Echarts官方…...

源码分析之Openlayers样式篇CircleStyle类
访问Openlayers网站(https://jinuss.github.io/Openlayers_map_pages/,网站是基于Vue3 Openlayers,里面有大量的实践和案例。觉得还不错,可以 给个小星星Star,鼓励一波 https://github.com/Jinuss/OpenlayersMap哦~ 概述 在 Ope…...

解决CentOS9系统下Zabbix 7.2图形中文字符乱码问题
操作系统:CentOS 9 Zabbix版本:Zabbix7.2 问题描述:主机图形中文字符乱码 解决方案: # 安装字体配置和中文语言包 sudo yum install -y fontconfig langpacks-zh_CN.noarch # 检查是否已有中文字体: fc-list :lan…...

AF3 FourierEmbedding类源码解读
FourierEmbedding 是一个用于扩散条件的傅里叶嵌入类,其核心是将输入的时间步噪声强度或控制参数(timestep)转换为高维的周期性特征。 源代码: class FourierEmbedding(nn.Module):"""Fourier embedding for diffusion conditioning."""de…...

vsftpd虚拟用户部署
vsftpd虚拟用户部署 案例提供两个用户如下,使用centos7验证可行。 test *AO9ih&7 ftp DTx4zp_shell脚本运行一键安装vsftp #!/bin/bash yum -y install vsftpd ftp >/etc/vsftpd/vsftpd.conf cat <<EOL >> /etc/vsftpd/vsftpd.conf anonymous_enableNO l…...

MySQL 容器已经停止(但仍然存在),但希望重新启动它,并使它的 3306 端口映射到宿主机的 3306 端口是不可行的
重新启动容器并映射端口是不行的 由于你已经有一个名为 mysql-container 的 MySQL 容器,你可以使用 docker start 启动它。想要让3306 端口映射到宿主机是不行的,实际上,端口映射是在容器启动时指定的。你无法在容器已经创建的情况下直接修改…...

汇编实验·顺序程序设计
一、实验目的: 1.能够熟练的进行顺序程序的编写,掌握基本的汇编语言指令的用法 2.通过程序设计理解掌握不同类型的数据混合运算的基本规则 3.熟练掌握各种寻址方式,深入理解逻辑地址和物理地址的相关概念 二、实验内容 有三个长度分别为1、2、4个字节的数据,编写程序求…...

AIGC视频扩散模型新星:Video 版本的SD模型
大家好,这里是好评笔记,公主号:Goodnote,专栏文章私信限时Free。本文详细介绍慕尼黑大学携手 NVIDIA 等共同推出视频生成模型 Video LDMs。NVIDIA 在 AI 领域的卓越成就家喻户晓,而慕尼黑大学同样不容小觑,…...

HarmonyOS:通过(SQLite)关系型数据库实现数据持久化
一、场景介绍 关系型数据库基于SQLite组件,适用于存储包含复杂关系数据的场景,比如一个班级的学生信息,需要包括姓名、学号、各科成绩等,又或者公司的雇员信息,需要包括姓名、工号、职位等,由于数据之间有较…...

10. SpringCloud Alibaba Sentinel 规则持久化部署详细剖析
10. SpringCloud Alibaba Sentinel 规则持久化部署详细剖析 文章目录 10. SpringCloud Alibaba Sentinel 规则持久化部署详细剖析1. 规则持久化1.1 Nacos Server 配置中心-规则持久化实例 2. 最后: 1. 规则持久化 规则没有持久化的问题 如果 sentinel 流控规则没有…...

STM32更新程序OTA
STM32的OTA(Over-The-Air)更新程序是一种通过无线通信方式,为设备分发新软件、配置甚至更新加密密钥的技术。以下是关于STM32 OTA更新程序的详细介绍: 一、OTA升级流程 STM32的OTA升级流程通常包括以下几个关键步骤:…...
|稀土掘金-147.寻找独一无二的糖葫芦串、119.游戏队友搜索)
MarsCode青训营打卡Day10(2025年1月23日)|稀土掘金-147.寻找独一无二的糖葫芦串、119.游戏队友搜索
资源引用: 147.寻找独一无二的糖葫芦串 119.游戏队友搜索 今日小记: 回乡聚会陪家人,休息一天~ 稀土掘金-147.寻找独一无二的糖葫芦串(147.寻找独一无二的糖葫芦串) 题目分析: 给定n个长度为m的字符串表…...
 : 安装组件出错解决)
vue(33) : 安装组件出错解决
1. request to https://registry.npm.taobao.org/semver/download/semver-6.1.1.tgz?cache0&other_urlshttps%3A%2F%2Fregistry.npm.taobao.org%2Fsemver%2Fdownload%2Fsemver-6.1.1.tgz failed, reason: certificate has expired 这个错误提示表明你在尝试从https://reg…...
ChatGPT结合Excel辅助学术数据分析详细步骤分享!
目录 一.Excel在学术论文中的作用✔ 二.Excel的提示词✔ 三. 编写 Excel 命令 四. 编写宏 五. 执行复杂的任务 六. 将 ChatGPT 变成有用的 Excel 助手 一.Excel在学术论文中的作用✔ Excel作为一种广泛使用的电子表格软件,在学术论文中可以发挥多种重要作用&a…...
stm32f103 单片机(一)第一个工程
先看一个简单的 系统上已经安装好了keil5 与ARM包,也下载好了STM32固件库 新建一个工程,添加三个组 加入如下文件 在options 里作如下配置 准备在main.c 中写下第一个实验,点亮一个小灯。 像51单片机一样直接对引脚赋值是行不通的 在…...
云计算和服务器
一、云计算概述 ICT是世界电信协会在2001年的全球性会议上提出的综合性概念,ICT分为IT和CT,IT(information technology)信息技术,负责对数据生命周期的管理;CT(communication technology),负责数据的传输管理。 CT技术…...
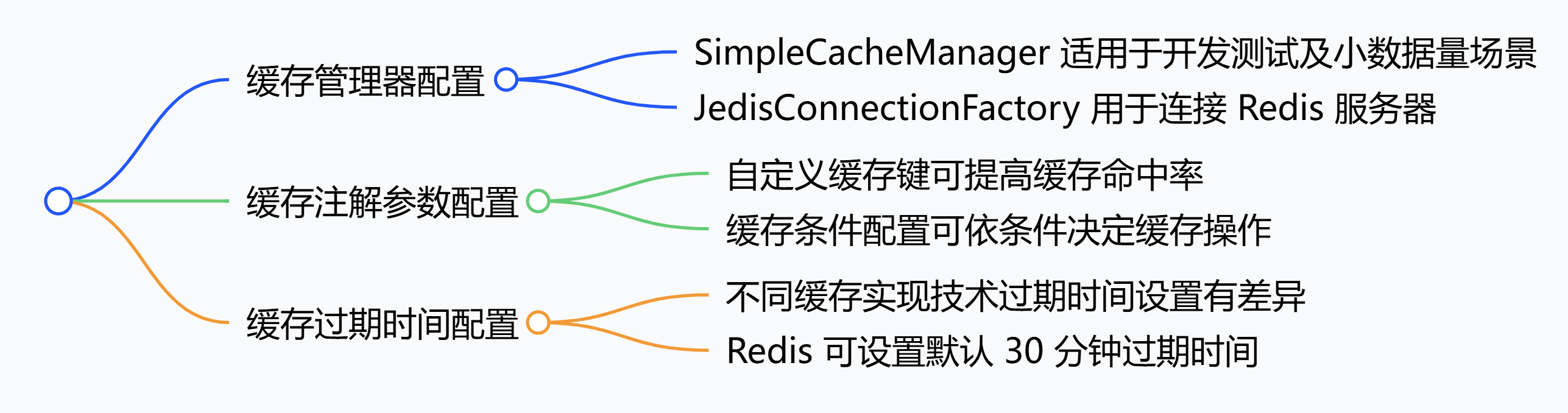
Spring 框架:配置缓存管理器、注解参数与过期时间
在 Spring 框架中,可通过多种方式配置缓存具体行为,常见配置方法如下。 1. 缓存管理器(CacheManager)配置 基于内存的缓存管理器配置(以SimpleCacheManager为例) SimpleCacheManager 是 Spring 提供的简单…...
)
保姆级教程:在ArcGIS Pro插件中集成你的自定义工具箱(以‘消除重复要素’为例)
从脚本到按钮:ArcGIS Pro插件开发实战指南 在GIS日常工作中,我们常常会遇到一些重复性的数据处理任务。比如数据质检环节的"消除重复要素"操作,虽然可以通过Python脚本实现,但每次都需要打开IDE或Python窗口执行代码&am…...

告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境
告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境 对于嵌入式开发者来说,配置开发环境往往是个令人头疼的问题。传统虚拟机方案虽然能提供完整的Linux体验,但资源占用高、启动慢、与宿主系统交互不便等问题一直困扰着开发者。…...

智能手机相机光谱特性测量与多光谱成像技术
1. 智能手机相机光谱特性测量基础智能手机相机的光谱灵敏度函数(Spectral Sensitivity Function, SSF)和透射率函数是计算摄影领域的核心参数,它们决定了设备对光信号的响应特性。准确获取这些参数对色彩还原、光谱重建和白平衡校准等任务至关重要。1.1 光谱灵敏度函…...

雪球网md5__1038参数逆向解析与Node.js复现
1. 这不是“破解”,而是对前端加密逻辑的常规逆向还原你打开雪球网任意一只股票详情页,F12 打开开发者工具,切到 Network 面板,刷新页面——很快就能在 XHR 请求里捕获到类似这样的接口:https://xueqiu.com/stock/cube…...
)
Windows10下V-REP教育版安装保姆级教程(附百度网盘资源与避坑点)
Windows10系统V-REP教育版完整安装指南:从下载到实战避坑在机器人仿真和自动化控制领域,V-REP(现更名为CoppeliaSim)作为一款功能强大的跨平台机器人仿真软件,已经成为众多工科学生和研究人员的首选工具。特别是其教育…...

AI学习 - 大模型基础入门
AI学习 - 大模型基础入门 从零开始:Ollama 安装 → 本地模型运行 → Python 代码接入 → 理解核心概念 摘要 本文记录了在 Windows 上使用 Ollama 部署本地大模型、并通过 Python 代码接入调用的完整过程。内容涵盖:Ollama 安装与模型拉取、大模型基础概…...
)
Allegro PCB设计小技巧:如何让Route Keepout区域既能走线又能打过孔(附详细步骤图)
Allegro PCB设计实战:Route Keepout区域的灵活控制技巧 在高速PCB设计中,Route Keepout区域的管理常常让工程师陷入两难境地——元件封装自带的限制区域与实际布线需求产生冲突。特别是处理PCIE等高速信号时,这种矛盾尤为突出。传统做法要么完…...

基于LSTM自编码器的家用电器功耗异常检测系统构建指南
1. 项目概述:从能耗洞察到智能干预我们每天都在和各种家用电器打交道,从清晨唤醒你的咖啡机,到深夜还在默默工作的路由器。你有没有想过,这些看似微不足道的设备,其背后隐藏的能耗模式,其实大有文章&#x…...

Lovable电商网站搭建,为什么92%的初创团队在第3周就遭遇性能雪崩?
更多请点击: https://codechina.net 第一章:Lovable电商网站搭建 Lovable 是一个面向中小商户的轻量级电商解决方案,采用现代 Web 技术栈构建,强调可扩展性、用户体验与快速部署。其核心基于 Vue 3(Composition API&a…...

如何用Nucleus Co-Op让单机游戏变身本地多人分屏神器
如何用Nucleus Co-Op让单机游戏变身本地多人分屏神器 【免费下载链接】nucleuscoop Starts multiple instances of a game for split-screen multiplayer gaming! 项目地址: https://gitcode.com/gh_mirrors/nu/nucleuscoop 还在为想和朋友一起玩游戏却只有一台电脑而烦…...