基于相机内参推导的透视投影矩阵
基于相机内参推导透视投影矩阵(splatam):
M c a m = [ 2 ⋅ f x w 0.0 ( w − 2 ⋅ c x ) w 0.0 0.0 2 ⋅ f y h ( h − 2 ⋅ c y ) h 0.0 0 0 f a r + n e a r n e a r − f a r 2 f a r ⋅ n e a r n e a r − f a r 0.0 0.0 − 1.0 0.0 ] M_{cam}= \begin{bmatrix} \frac{2 \cdot fx}{w} & 0.0 & \frac{(w - 2 \cdot cx)}{w} & 0.0 \\ 0.0 & \frac{2 \cdot fy}{h} & \frac{(h - 2 \cdot cy)}{h} & 0.0 \\ 0 & 0 & \frac{far + near}{near - far} & \frac{2far \cdot near}{near - far} \\ 0.0 & 0.0 & -1.0 & 0.0 \end{bmatrix} Mcam= w2⋅fx0.000.00.0h2⋅fy00.0w(w−2⋅cx)h(h−2⋅cy)near−farfar+near−1.00.00.0near−far2far⋅near0.0
fx: 相机内参中的焦距在x方向上的分量。fy: 相机内参中的焦距在y方向上的分量。cx: 图像中心在x方向上的坐标。cy: 图像中心在y方向上的坐标。w: 图像宽度。h: 图像高度。near: 视锥体(frustum)的近裁剪平面距离。far: 视锥体(frustum)的远裁剪平面距离。
注:此处深度为负
参考透射投影矩阵的数学推导的推导得到透视投影矩阵另一种形式:
M p = [ 2 n r − l 0 r + l r − l 0 0 2 n t − b t + b t − b 0 0 0 f + n n − f 2 f n n − f 0 0 − 1 0 ] M_p = \begin{bmatrix} \frac{2n}{r - l} & 0 & \frac{r + l}{r - l} & 0 \\ 0 & \frac{2n}{t - b} & \frac{t + b}{t - b} & 0 \\ 0 & 0 & \frac{f + n}{n - f} & \frac{2fn}{n - f} \\ 0 & 0 & -1 & 0 \end{bmatrix} Mp= r−l2n0000t−b2n00r−lr+lt−bt+bn−ff+n−100n−f2fn0
n: 近裁剪平面距离。f: 远裁剪平面距离。r: 近裁剪平面的右边界。l: 近裁剪平面的左边界。t: 近裁剪平面的上边界。b: 近裁剪平面的下边界。
可以先看这两个参考再往下看:
参考:
https://zhuanlan.zhihu.com/p/421962223
https://blog.csdn.net/qq_43758883/article/details/116503614
通过视场角来从 M p M_p Mp得到 M c a m M_{cam} Mcam:

上图,忽略y轴,上半部分是相机坐标系,下班部分是像素坐标系,可见相机坐标下的视场角和像素坐标下的视场角是一致的,
1、
在相机坐标系下:
t a n ( f o v x / 2 ) = r − l 2 n tan(fovx/2) = \frac{r-l}{2n} tan(fovx/2)=2nr−l
在像素坐标系下:
t a n ( f o v x / 2 ) = f x w / 2 tan(fovx/2 )= \frac{fx}{w/2} tan(fovx/2)=w/2fx
将上式公式同时提取缩放因子:
t a n ( f o v x / 2 ) = α f α w ′ / 2 = f w ′ / 2 = r − l 2 n tan(fovx/2) = \frac{ \alpha f}{\alpha w'/2} = \frac{ f}{ w'/2} = \frac{r-l}{2n} tan(fovx/2)=αw′/2αf=w′/2f=2nr−l
2、
α ( r − l ) = w α ( r + l ) = ( w − 2 c x ) \begin{align} \alpha (r-l) &= w \\ \alpha (r+l) &= (w - 2cx) \end{align} α(r−l)α(r+l)=w=(w−2cx)
所以,
r + l r − l = ( w − 2 c x ) w \frac {r+l}{r-l} = \frac {(w - 2cx)}{w} r−lr+l=w(w−2cx)
同理,透视投影矩阵y轴也是如此推导。
splatam非标准透视投影
splatam使用的非标准透视投影,与一般不同,splatam是把深度缩放到 [0,1]:
此处深度全取正数,因此第三、四列需要加个负号。
M s p l a t a m = [ 2 ⋅ f x w 0.0 − ( w − 2 ⋅ c x ) w 0.0 0.0 2 ⋅ f y h − ( h − 2 ⋅ c y ) h 0.0 0.0 0.0 f a r f a r − n e a r − ( f a r ⋅ n e a r ) f a r − n e a r 0.0 0.0 1.0 0.0 ] M_{splatam}= \begin{bmatrix} \frac{2 \cdot fx}{w} & 0.0 & \frac{-(w - 2 \cdot cx)}{w} & 0.0 \\ 0.0 & \frac{2 \cdot fy}{h} & \frac{-(h - 2 \cdot cy)}{h} & 0.0 \\ 0.0 & 0.0 & \frac{far}{far - near} & \frac{-(far \cdot near)}{far - near} \\ 0.0 & 0.0 & 1.0 & 0.0 \end{bmatrix} Msplatam= w2⋅fx0.00.00.00.0h2⋅fy0.00.0w−(w−2⋅cx)h−(h−2⋅cy)far−nearfar1.00.00.0far−near−(far⋅near)0.0
可以看到矩阵的第三行与之前的不同,它的作用是把深度最后归一化到 [0,1]。
设相机坐标下的点位置为 [ x c a m , y c a m , z c a m , 1 ] [x_{cam} , y_{cam} ,z_{cam},1] [xcam,ycam,zcam,1],对应裁剪空间坐标为 [ x c , y c , z c , w c ] [x_{c} , y_{c} ,z_{c},w_c] [xc,yc,zc,wc],对应NDC坐标 [ x n , y n , z n , 1 ] [x_{n} , y_{n} ,z_{n},1] [xn,yn,zn,1]。
故:
[ x c y c z c w c ] = M s p l a t a m [ x c a m y c a m z c a m 1 ] \begin{bmatrix}x_{c} \\ y_{c} \\ z_{c} \\w_c \end{bmatrix} =M_{splatam} \begin{bmatrix}x_{cam} \\ y_{cam} \\ z_{cam} \\1 \end{bmatrix} xcyczcwc =Msplatam xcamycamzcam1
考虑深度,即z轴的变换有:
z c = f a r f a r − n e a r z c a m − ( f a r ⋅ n e a r ) f a r − n e a r w c = z c a m \begin{align} z_c &= \frac{far}{far - near} z_{cam} - \frac{(far \cdot near)}{far - near} \\ w_c &= z_{cam} \end{align} zcwc=far−nearfarzcam−far−near(far⋅near)=zcam
归一化处理,得到NDC坐标
z n = z c w c = f a r f a r − n e a r z c a m − ( f a r ⋅ n e a r ) f a r − n e a r z c a m = f a r − ( f a r ⋅ n e a r ) z c a m f a r − n e a r \begin{align} z_n &= \frac {z_c}{w_c} = \frac{\frac{far}{far - near} z_{cam} - \frac{(far \cdot near)}{far - near}}{z_{cam}} \\ &= \frac{far - \frac{(far \cdot near)}{z_{cam}}}{far - near} \end{align} zn=wczc=zcamfar−nearfarzcam−far−near(far⋅near)=far−nearfar−zcam(far⋅near)
故,当 z c a m = n e a r z_{cam} = near zcam=near时, z n = 0 z_n = 0 zn=0, 当 z c a m = f a r z_{cam} = far zcam=far时, z n = 1 z_n = 1 zn=1,所以深度最后是限制在 [0,1]。为什么要怎样设计呢,因为使用3DGS渲染时,只考虑深度大于0的。
相关文章:
基于相机内参推导的透视投影矩阵
基于相机内参推导透视投影矩阵(splatam): M c a m [ 2 ⋅ f x w 0.0 ( w − 2 ⋅ c x ) w 0.0 0.0 2 ⋅ f y h ( h − 2 ⋅ c y ) h 0.0 0 0 f a r n e a r n e a r − f a r 2 f a r ⋅ n e a r n e a r − f a r 0.0 0.0 − 1.0 0.0 ] M_…...

浅析Dubbo 原理:架构、通信与调用流程
一、Dubbo 简介 Dubbo 是阿里巴巴开源的高性能、轻量级的 Java RPC(Remote Procedure Call,远程过程调用)框架,旨在实现不同服务之间的远程通信和调用。在分布式系统中,不同服务可能部署在不同的服务器上,D…...

03垃圾回收篇(D3_垃圾收集器的选择及相关参数)
目录 学习前言 一、收集器的选择 二、GC日志参数 三、垃圾收集相关的常用参数 四、内存分配与回收策略 1. 对象优先在Eden分配 2. 大对象直接进入老年代 3. 长期存活的对象将进入老年代 4. 动态对象年龄判定 5. 空间分配担保 学习前言 本章主要学习垃圾收集器的选择及…...

一、引论,《组合数学(第4版)》卢开澄 卢华明
零、前言 发现自己数数题做的很烂,重新学一遍组合数学吧。 参考卢开澄 卢华明 编著的《组合数学(第4版)》,只打算学前四章。 通过几个经典问题来了解组合数学所研究的内容。 一、幻方问题 据说大禹治水之前,河里冒出来一只乌龟,…...

Vue3+TS 实现批量拖拽文件夹上传图片组件封装
1、html 代码: 代码中的表格引入了 vxe-table 插件 <Tag /> 是自己封装的说明组件 表格列表这块我使用了插槽来增加扩展性,可根据自己需求,在组件外部做调整 <template><div class"dragUpload"><el-dialo…...
)
二叉树的所有路径(力扣257)
因为题目要求路径是从上到下的,所以最好采用前序遍历。这样可以保证按从上到下的顺序将节点的值存入一个路径数组中。另外,此题还有一个难点就是如何求得所有路径。为了解决这个问题,我们需要用到回溯。回溯和递归不分家,每递归一…...
缓存)
Python OrderedDict 实现 Least Recently used(LRU)缓存
OrderedDict 实现 Least Recently used(LRU)缓存 引言正文 引言 LRU 缓存是一种缓存替换策略,当缓存空间不足时,会移除最久未使用的数据以腾出空间存放新的数据。LRU 缓存的特点: 有限容量:缓存拥有固定的…...

LabVIEW项目中的工控机与普通电脑选择
工控机(Industrial PC)与普通电脑在硬件设计、性能要求、稳定性、环境适应性等方面存在显著差异。了解这些区别对于在LabVIEW项目中选择合适的硬件至关重要。下面将详细分析这两种设备的主要差异,并为LabVIEW项目中的选择提供指导。 硬件设…...
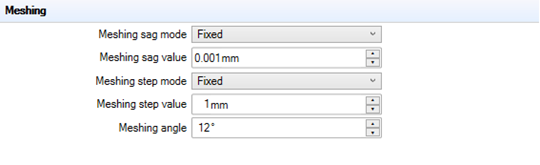
Ansys Speos | Speos Meshing 网格最佳实践
概述 网格划分是在各种计算应用中处理3D几何的基本步骤: 表面和体积:网格允许通过将复杂的表面和体积分解成更简单的几何元素(如三角形、四边形、四面体或六面体)来表示复杂的表面和体积。 模拟和渲染:网格是创建离散…...

elasticsearch segment数量对读写性能的影响
index.merge.policy.segments_per_tier 是一个配置选项,用于控制 Elasticsearch 中段(segment)合并策略的行为。它定义了在每一层的段合并过程中,允许存在的最大段数量。调整这个参数可以优化索引性能和资源使用。 假设你有一个索…...
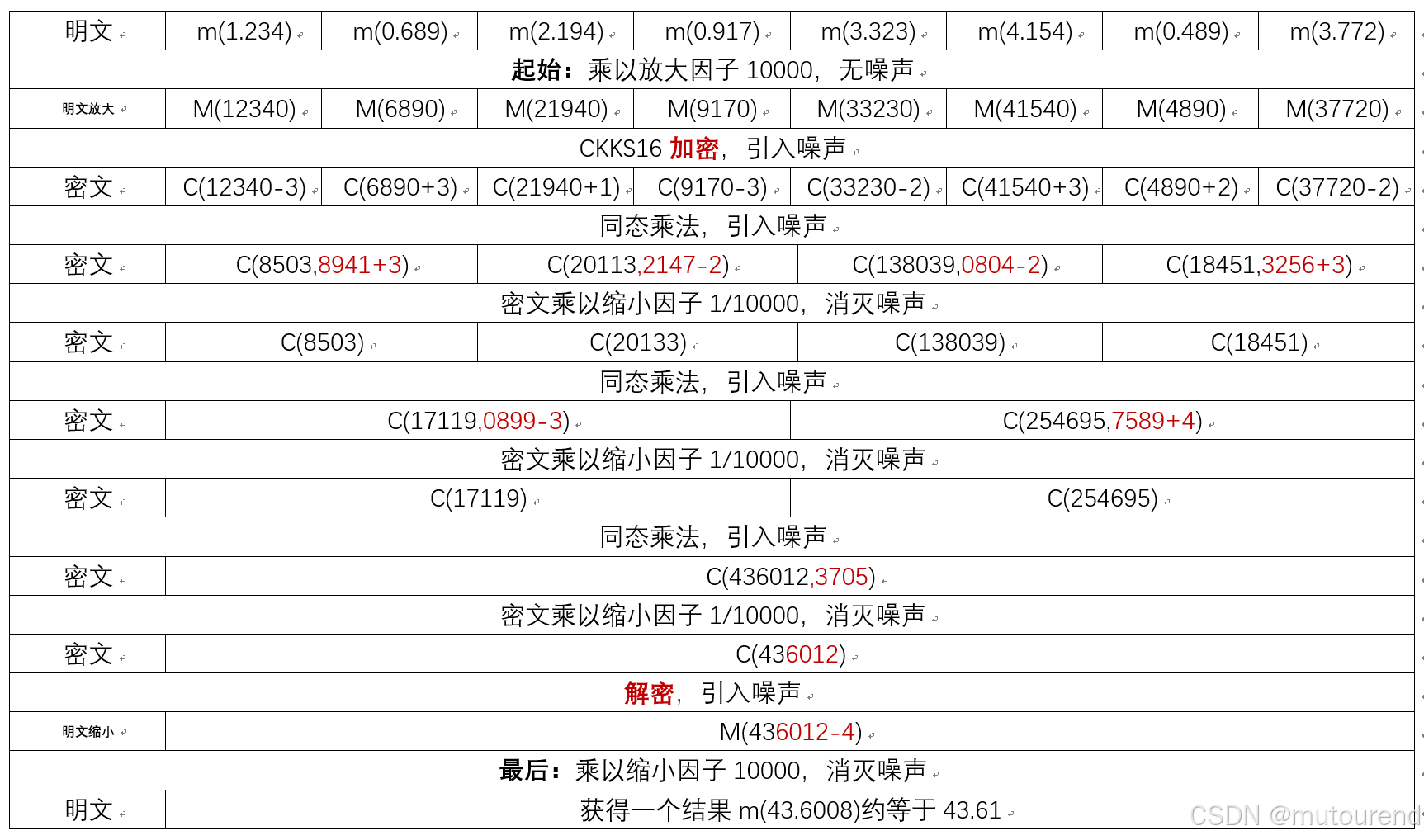
全同态加密理论、生态现状与未来展望(中2)
《全同态加密理论、生态现状与未来展望》系列由lynndell2010gmail.com和mutourend2010gmail.com整理原创发布,分为上中下三个系列: 全同态加密理论、生态现状与未来展望(上):专注于介绍全同态加密理论知识。全同态加密…...
鸿蒙UI(ArkUI-方舟UI框架)-开发布局
返回主章节 → 鸿蒙UI(ArkUI-方舟UI框架) 开发布局 1、布局概述 1)布局结构 2)布局元素组成 3)如何选择布局 声明式UI提供了以下10种常见布局,开发者可根据实际应用场景选择合适的布局进行页面开发。 …...

RPC是什么?和HTTP区别?
RPC 是什么?HTTP 是什么? 作为一个程序员,假设我们需要从A电脑的进程发送一段数据到B电脑的进程,我们一般会在代码中使用 Socket 进行编程。 此时,可选性一般就是 TCP 和 UDP 二选一,由于 TCP 可靠、UDP 不…...
Linux C\C++编程-建立文件和内存映射
【图书推荐】《Linux C与C一线开发实践(第2版)》_linux c与c一线开发实践pdf-CSDN博客 《Linux C与C一线开发实践(第2版)(Linux技术丛书)》(朱文伟,李建英)【摘要 书评 试读】- 京东图书 Linu…...
行政纠错——pycorrector学习
pycorrector是一个开源中文文本纠错工具,它支持对中文文本进行音似、形似和语法错误的纠正。此工具是使用Python3进行开发的,并整合了Kenlm、ConvSeq2Seq、BERT、MacBERT、ELECTRA、ERNIE、Transformer等多种模型来实现文本纠错功能。pycorrector官方仓库…...

Go的defer原理
Go 的 defer 原理 defer 是 Go 语言中的一个关键字,用于延迟执行一个函数调用。它通常用于处理资源释放、连接关闭等操作,确保这些操作在函数返回之前执行。 1. 什么是 defer? defer 关键字用于延迟执行一个函数调用,直到包含它…...

Windows 下本地 Docker RAGFlow 部署指南
Windows 下本地 Docker RAGFlow 部署指南 环境要求部署步骤1. 克隆代码仓库2. 配置 Docker 镜像加速(可选)3. 修改端口配置(可选)4. 启动服务5. 验证服务状态6. 访问服务7. 登录系统8. 配置模型8.1 使用 Ollama 本地模型8.2 使用在线 API 服务9. 开始使用10. 常见问题处理端…...

专题三_穷举vs暴搜vs深搜vs回溯vs剪枝_全排列
dfs解决 全排列&子集 1.全排列 link:46. 全排列 - 力扣(LeetCode) 全局变量回溯 code class Solution { public:vector<vector<int>> ans;vector<int> cur;vector<bool> used;vector<vector<int>> permute…...

【IEEE Fellow 主讲报告| EI检索稳定】第五届机器学习与智能系统工程国际学术会议(MLISE 2025)
重要信息 会议时间地点:2025年6月13-15日 中国深圳 会议官网:http://mlise.org EI Compendex/Scopus稳定检索 会议简介 第五届机器学习与智能系统工程国际学术会议将于6月13-15日在中国深圳隆重召开。本次会议旨在搭建一个顶尖的学术交流平台…...

华为E9000刀箱服务器监控指标解读
美信监控易内置了数千种常见设备监测器,能够监测超过20万项指标。这些指标涵盖了从硬件设备到软件系统,从网络性能到安全状态等各个方面。如下基于美信监控易——IT基础监控模块,对华为E9000刀箱服务器部分监控指标进行解读。 一、华为E9000…...

PA100K数据集实战:从下载到结构化解析全流程
1. PA100K数据集初探:为什么选择它?如果你正在研究行人属性识别,PA100K绝对是个绕不开的宝藏数据集。这个数据集包含了10万张真实监控场景下的行人图像,每张图都标注了26种常见属性——从衣着风格(比如是否穿T恤、裙子…...

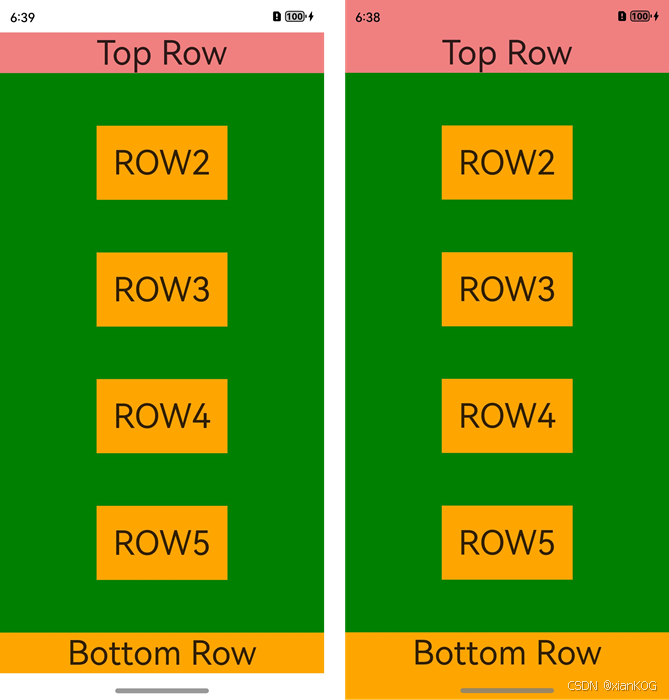
告别沉浸式白屏!UniApp中iOS/Android底部安全区与顶部状态栏颜色自定义全攻略
告别沉浸式白屏!UniApp中iOS/Android底部安全区与顶部状态栏颜色自定义全攻略当开发者尝试在UniApp中实现沉浸式设计时,往往会遇到一个令人头疼的问题——默认的白色安全区和状态栏导致界面元素(如电池图标、信号强度)几乎不可见。…...

ARM指令追踪技术及TRCVICTLR寄存器详解
1. ARM指令追踪技术概述在嵌入式系统开发和调试过程中,指令追踪(Instruction Trace)是一项至关重要的技术。它通过硬件机制记录处理器的执行流程,为开发者提供程序运行的完整轨迹。ARM架构从v7开始引入嵌入式跟踪宏单元࿰…...

告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境
告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境 对于嵌入式开发者来说,配置开发环境往往是个令人头疼的问题。传统虚拟机方案虽然能提供完整的Linux体验,但资源占用高、启动慢、与宿主系统交互不便等问题一直困扰着开发者。…...

CANN-昇腾NPU-RAG推理-检索增强生成怎么部署
RAG(Retrieval-Augmented Generation)是 LLM 知识库的组合:先检索相关文档,再让 LLM 基于文档回答。昇腾NPU 上部署 RAG 需要两个组件:Embedding 模型(做向量检索)和 LLM(做生成&am…...

基于双T振荡器的正弦波LED调光电路设计与实践
1. 项目概述:用双T振荡器实现正弦波LED调光最近在捣鼓一些氛围灯项目,总感觉用单片机PWM做的呼吸灯效果有点“硬”,那种线性的明暗变化看久了难免审美疲劳。于是翻出以前模拟电路的老本行,琢磨着能不能用纯硬件的方式,…...

从开题到定稿零焦虑:okbiye AI 论文写作,帮你把毕业季的 “大山” 变成坦途
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 毕业季的深夜,宿舍台灯下的屏幕亮着刺眼的光,文档里的字数停留在三位数,而 deadline 正一天天逼近。你是…...

Office RibbonX Editor:简单三步打造你的专属Office界面
Office RibbonX Editor:简单三步打造你的专属Office界面 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribbonx-edit…...
)
DeepSeek代码风格检查避坑指南(内部审计报告首次披露:37个被忽略的合规红线)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek代码风格检查的合规性本质与审计背景 DeepSeek代码风格检查并非单纯的技术偏好约束,而是嵌入研发治理链条中的合规性控制节点。其本质是将编程实践与组织级安全策略、行业监管要求&…...

yuzu模拟器完整指南:在电脑上畅玩Switch游戏的终极解决方案
yuzu模拟器完整指南:在电脑上畅玩Switch游戏的终极解决方案 【免费下载链接】yuzu 任天堂 Switch 模拟器 项目地址: https://gitcode.com/GitHub_Trending/yu/yuzu 想在电脑上体验任天堂Switch游戏的魅力吗?yuzu模拟器正是你寻找的完美答案。作为…...