C++AVL树(二)详解
文章目录
- AVL树
- 旋转
- 单旋
- 右单旋
- 左单旋
- 双旋
- 左右双旋
- 右左双旋
- 平衡因子的更新
- 左右双旋
- 右左双旋
- 判断是不是AVL树
- 时间复杂度分析
- 全部的代码
AVL树
旋转
单旋
单旋是纯粹的一边高
单旋平衡因子是同号
右单旋
a,b,c自身不能发生旋转
并且也不能不向上继续更新(不能停止更新)



插入之前是h+2,插入后进行旋转后是h+2,没有对pParent它的子树的高度产生影响,不用继续向上更新
// 链接孩子和父亲
// 右单旋,旋转点是parent
void Rotate(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;// b可能为空树if (suLR != nullptr)subLR->_parent = parent;// 记录parent的parentpParent = parent->_parent;subL->_right = parent;parent->_parent = subL;// 1. 10是这棵树的总根if (parent == _root){subL = _root;subL->_parent = nullptr;}else{// 2. 10是这棵树的局部根// 就有父亲的父亲节点// pParent左可能是parent,右也可能是parentif (pParent->_left == parent){pParent->_left = subL;}else{pParent->_right = subL;}subL->_parent = pParent;}// 更新平衡因子subL->_bf = 0;parent->_bf = 0;}
左单旋
左单旋和右单旋类似

// 左单旋,旋转点是parent
void RotateL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;// b不是空树if (subRL)subRL->_parent = parent;// 记录父亲节点的父亲节点Node* pParent = parent->_parent;subR->_left = parent;parent->_parent = subR;// 1. 10是这棵树的总根if (_root == parent){_root = subR;subR->_parent = nullptr;}else{// 2. 10是这棵树的局部根if (pParent->_left == parent){pParent->_left = subR;}else{pParent->_right = subR;}subR->_parent = pParent;}subR->_bf = 0;parent->_bf = 0;
}
双旋
双旋平衡因子会异号
双旋是进行两次单旋
对于5来说右边高,对于10来说左边高,需要进行双旋
下面是进行的单旋解决不了问题

对于5来说右边高,对于10来说左边高,需要进行双旋
进行单旋解决不了问题,会变成下面的样子

左右双旋
h == 0

h == 1

右左双旋
右左双旋和左右双旋类似,这里就不画了
平衡因子的更新
左右双旋
双旋和单旋的平衡因子更新方式不同,双旋按照单旋的方式更新后5,10,8都是0,不符合逻辑
左右双旋中h0和h1具体场景分析,下面我们将a/b/c子树抽象为高度h的AVL
子树进行分析,另外我们需要把b子树的细节进一步展开为8和左子树高度为h-1的e和f子树,因为
我们要对b的父亲5为旋转点进行左单旋,左单旋需要动b树中的左子树。b子树中新增结点的位置
不同,平衡因子更新的细节也不同,通过观察8的平衡因子不同,这里我们要分三个场景讨论。
- 场景1:h >= 1时,新增结点插入在e子树,e子树高度从h-1并为h并不断更新8->5->10平衡因子,
引发旋转,其中8的平衡因子为-1,旋转后8和5平衡因子为0,10平衡因子为1。 - 场景2:h >= 1时,新增结点插入在f子树,f子树高度从h-1变为h并不断更新8->5->10平衡因子,引
发旋转,其中8的平衡因子为1,旋转后8和10平衡因子为0,5平衡因子为-1。 - 场景3:h == 0时,a/b/c都是空树,b自己就是一个新增结点,不断更新5->10平衡因子,引发旋转,其中8的平衡因子为0,旋转后8和10和5平衡因子均为0。

8的平衡因子会影响其它的平衡因子:
- 插入到8的左边,8的平衡因子为-1
- 插入到8的右边,8的平衡因子为1
- 8本身就是要插入的节点,8的平衡因子为0
// 左右双旋
void RotateLR(Node* parent)
{Node* subL = parent->_left;Node* subLR = subL->_right;// 提前存平衡因子int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (subLR->_bf == -1){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 1;}else if (subLR->_bf == 1){subLR->_bf = 0;subL->_bf = -1;parent->_bf = 0;}else if (subLR->_bf == 0){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 0;}else{assert(false);}
}
右左双旋
跟左右双旋类似,下面我们将a/b/c子树抽象为高度h的AVL子树进行分析,另外我们需要把b子树的细节进一步展开为12和左子树高度为h-1的e和f子树,因为我们要对b的父亲15为旋转点进行右单旋,右单旋需要动b树中的右子树。b子树中新增结点的位置不同,平衡因子更新的细节也不同,通过观察12的平衡因子不同,这里我们要分三个场景讨论。
- 场景1:h >= 1时,新增结点插入在e子树,e子树高度从h-1变为h并不断更新12->15->10平衡因子,引发旋转,其中12的平衡因子为-1,旋转后10和12平衡因子为0,15平衡因子为1。
- 场景2:h >= 1时,新增结点插入在f子树,f子树高度从h-1变为h并不断更新12->15->10平衡因子,引发旋转,其中12的平衡因子为1,旋转后15和12平衡因子为0,10平衡因子为-1。
- 场景3:h == 0时,a/b/c都是空树,b自己就是一个新增结点,不断更新15->10平衡因子,引发旋转,其中12的平衡因子为0,旋转后10和12和15平衡因子均为0。

3种情况:
- 插入到e那边
- 插入到f那边
- b本身就是插入的点
// 右左双旋
void RotateRL(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;// 提前存放平衡因子int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == -1){subRL->_bf = 0;parent->_bf = 0;subR->_bf = 1;}else if (bf == 1){subRL->_bf = 0;parent->_bf = -1;subR->_bf = 0;}else if (bf == 0){subRL->_bf = 0;parent->_bf = 0;subR->_bf = 0;}else{assert(false);}
}
判断是不是AVL树
用高度差的绝对值是否 <= 1来检查
// 算树的高度,左右子树高的那个加1
int _Height(Node* root)
{if (root == nullptr){return 0;}int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;
}// 判断是不是AVL树
bool _IsBalanceTree(Node* root)
{// 空树也是AVL树if (root == nullptr)return true;// pRoot的子树的平衡因子,左右子树的高度差int _leftheight = _Height(root->_left);int _rightheight = _Height(root->_right);int diff = _rightheight - _leftheight;// 高度差超过2或者pRoot的平衡因子不等于计算出的平衡因子就不是AVL树if (abs(diff) >= 2){cout << root->_kv.first << "高度差异常" << endl;return false;}else if (diff != root->_bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}// pRoot节点的左树和右树都是AVL树,那么就是AVL树return _IsBalanceTree(root->_left) && _IsBalanceTree(root->_right);
}
时间复杂度分析
插入:logN,寻找插入的位置,会找到叶子的位置
旋转:常数次
调整:假设最坏情况调整到根logN,平衡因子为-1/1,要继续调整
时间复杂度:logN
全部的代码
#pragma once
#include<iostream>
#include<assert.h>using namespace std;template<class K, class V>
struct AVLTreeNode
{// 需要parent指针pair<K, V> _kv;AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;int _bf;// 平衡因子AVLTreeNode(const pair<K, V>& kv):_kv(kv),_left(nullptr),_right(nullptr),_parent(nullptr),_bf(0)// 刚插入的节点平衡因子都是0{}
};template<class K, class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node;
public:bool insert(const pair<K, V>& kv){if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{// 不冗余return false;}}// 链接父节点cur = new Node(kv);if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;// 更新平衡因子// 控制平衡while (parent){if (parent->_left == cur)parent->_bf--;else // if (parent->_right == cur)parent->_bf++;if (parent->_bf == 0){break;}else if (parent->_bf == -1 || parent->_bf == 1){cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){// 旋转if (parent->_bf == -2 && cur->_bf == -1){// 右旋,左高右低RotateR(parent);}else if(parent->_bf == 2&&cur->_bf == 1){// 左旋,右高左低RotateL(parent);}else if(parent->_bf == -2&&cur->_bf == 1){// 左右双旋,右高左高RotateLR(parent);}else if (parent->_bf == 2 && cur->_bf == -1){// 右左双旋,左高右高RotateRL(parent);}else{assert(false);}break;}else{// 逻辑错误,之前就不是AVL树assert(false);}}return true;}// 右单旋,旋转点是parentvoid RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;// b可能为空树if (subLR != nullptr)subLR->_parent = parent;// 记录parent的parentNode* pParent = parent->_parent;subL->_right = parent;parent->_parent = subL;// 1. 10是这棵树的总根if (parent == _root){_root = subL;subL->_parent = nullptr;}else{// 2. 10是这棵树的局部根// pParent左可能是parent,右也可能是parentif (pParent->_left == parent){pParent->_left = subL;}else{pParent->_right = subL;}subL->_parent = pParent;}// 更新平衡因子subL->_bf = 0;parent->_bf = 0;}// 左单旋,旋转点是parentvoid RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;// b不是空树if (subRL)subRL->_parent = parent;// 记录父亲节点的父亲节点Node* pParent = parent->_parent;subR->_left = parent;parent->_parent = subR;// 1. 10是这棵树的总根if (_root == parent){_root = subR;subR->_parent = nullptr;}else{// 2. 10是这棵树的局部根if (pParent->_left == parent){pParent->_left = subR;}else{pParent->_right = subR;}subR->_parent = pParent;}subR->_bf = 0;parent->_bf = 0;}// 左右双旋void RotateLR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;// 提前存平衡因子int bf = subLR->_bf;RotateL(parent->_left);RotateR(parent);if (subLR->_bf == -1){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 1;}else if (subLR->_bf == 1){subLR->_bf = 0;subL->_bf = -1;parent->_bf = 0;}else if (subLR->_bf == 0){subLR->_bf = 0;subL->_bf = 0;parent->_bf = 0;}else{assert(false);}}// 右左双旋void RotateRL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;// 提前存放平衡因子int bf = subRL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == -1){subRL->_bf = 0;parent->_bf = 0;subR->_bf = 1;}else if (bf == 1){subRL->_bf = 0;parent->_bf = -1;subR->_bf = 0;}else if (bf == 0){subRL->_bf = 0;parent->_bf = 0;subR->_bf = 0;}else{assert(false);}}Node* Find(const K& key){Node* cur = _root;while (cur){if (cur->_kv.first < key){cur = cur->_right;}else if (cur->_kv.first > key){cur = cur->_left;}else{return cur;}}return nullptr;}// 大小int Size(){return _Size(_root);}// 判断是不是AVL树bool IsBalanceTree(){return _IsBalanceTree(_root);}// 算树的高度int Height(){_Height(_root);}// 中序void InOrder(){_InOrder(_root);cout << endl;}
private:// 算树的高度,左右子树高的那个加1int _Height(Node* root){if (root == nullptr){return 0;}int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}// 算树的节点个数 int _Size(Node* root){if (root == nullptr)return 0;return _Size(root->_left) + _Size(root->_right) + 1;}// 判断是不是AVL树bool _IsBalanceTree(Node* root){// 空树也是AVL树if (root == nullptr)return true;// pRoot的子树的平衡因子,左右子树的高度差int _leftheight = _Height(root->_left);int _rightheight = _Height(root->_right);int diff = _rightheight - _leftheight;// 高度差超过2或者pRoot的平衡因子不等于计算出的平衡因子就不是AVL树if (abs(diff) >= 2){cout << root->_kv.first << "高度差异常" << endl;return false;}else if (diff != root->_bf){cout << root->_kv.first << "平衡因子异常" << endl;return false;}// pRoot节点的左树和右树都是AVL树,那么就是AVL树return _IsBalanceTree(root->_left) && _IsBalanceTree(root->_right);}void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_left);cout << root->_kv.first << ":" << root->_kv.second << endl;_InOrder(root->_right);}private:Node* _root = nullptr;
};#include"AVLTree.h"void TestAVLTree1()
{AVLTree<int, int> t;// 常规的测试⽤例int a[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };// 特殊的带有双旋场景的测试⽤例//int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14 };for (auto e : a){t.insert({ e, e });}t.InOrder();cout << t.IsBalanceTree() << endl;
}int main()
{TestAVLTree1();return 0;
}
相关文章:
C++AVL树(二)详解
文章目录 AVL树旋转单旋右单旋左单旋 双旋左右双旋右左双旋 平衡因子的更新左右双旋右左双旋 判断是不是AVL树时间复杂度分析全部的代码 AVL树 旋转 单旋 单旋是纯粹的一边高 单旋平衡因子是同号 右单旋 a,b,c自身不能发生旋转 并且也不能不向上继续更新(不能停…...

RocketMQ 的 Topic 和消息队列MessageQueue信息,是怎么分布到Broker的?怎么负载均衡到Broker的?
目录 1. Topic 和 MessageQueue 的基本概念 1.1 Topic 1.2 MessageQueue 2. Topic 和 MessageQueue 的分布 2.1 Topic 的创建 2.2 MessageQueue 分配到 Broker 2.3 分布规则 3. 负载均衡机制 3.1 Producer 的负载均衡 3.2 Consumer 的负载均衡 3.3 Broker 的负载均衡…...

无人机核心项目开发系列:从设计到实现的完整解析
无人机核心项目开发系列:从设计到实现的完整解析 01-面试大保健-核心项目-无人机-架构-硬件 1. 无人机项目概述 在这篇博客中,我们将回顾一个遥控四轴无人机的项目。这是一个面向儿童的玩具无人机,具备基础的飞行功能:上升、下…...

浅谈Redis
2007 年,一位程序员和朋友一起创建了一个网站。为了解决这个网站的负载问题,他自己定制了一个数据库。于2009 年开发,称之为Redis。这位意大利程序员是萨尔瓦托勒桑菲利波(Salvatore Sanfilippo),他被称为Redis之父,更…...

Ceisum无人机巡检直播视频投射
接上次的视频投影,Leader告诉我这个视频投影要用在两个地方,一个是我原先写的轨迹回放那里,另一个在无人机起飞后的地图回显,要实时播放无人机拍摄的视频,还要能转镜头,让我把这个也接一下。 我的天&#x…...

【组件库】使用Vue2+AntV X6+ElementUI 实现拖拽配置自定义vue节点
先来看看实现效果: 【组件库】使用 AntV X6 ElementUI 实现拖拽配置自定义 Vue 节点 在现代前端开发中,流程图和可视化编辑器的需求日益增加。AntV X6 是一个强大的图形化框架,支持丰富的图形操作和自定义功能。结合 ElementUI,…...

Vue.js组件开发-如何实现全选反选
在 Vue.js 中实现全选和反选功能,可以通过结合v-model、计算属性和事件处理来完成。 实现思路 • 数据绑定:为每个复选框绑定一个选中状态。 • 全选控制:通过一个复选框控制所有复选框的选中状态。 • 反选控制:通过一个按钮或…...

2025.1.20——四、[强网杯 2019]Upload1 文件上传|反序列化
题目来源:buuctf [强网杯 2019]Upload 1 目录 一、打开靶机,查看信息 二、解题思路 step 1:登陆进去看情况 step 2:大佬来支援——问题在cookie step 3:测试两个思路 1.目录穿越 2.目录扫描 step 4ÿ…...

php代码审计2 piwigo CMS in_array()函数漏洞
php代码审计2 piwigo CMS in_array()函数漏洞 一、目的 本次学习目的是了解in_array()函数和对项目piwigo中关于in_array()函数存在漏洞的一个审计并利用漏洞获得管理员帐号。 二、in_array函数学习 in_array() 函数搜索数组中是否存在指定的值。 in_array($search,$array…...
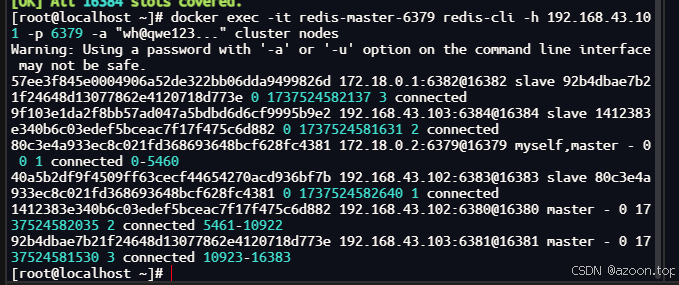
docker搭建redis集群(三主三从)
本篇文章不包含理论解释,直接开始集群(三主三从)搭建 环境 centos7 docker 26.1.4 redis latest (7.4.2) 服务器搭建以及环境配置 请查看本系列前几篇博客 默认已搭建好三个虚拟机并安装配置好docker 相关博客…...
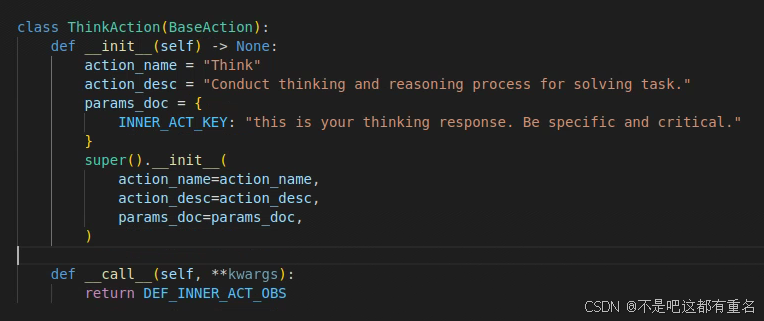
[Datawheel]利用Zigent框架编写智能体-1
1.背景知识 1.1 什么是zigent? Zigent 是一个多智能体框架,旨在简化和优化智能体的开发与部署。Zigent 是由 自塾(Zishu.co) 团队开发的一个开源项目。自塾在 2024 年推出了多个开源项目,其中包括 wow-agent…...

【计算机视觉】人脸识别
一、简介 人脸识别是将图像或者视频帧中的人脸与数据库中的人脸进行对比,判断输入人脸是否与数据库中的某一张人脸匹配,即判断输入人脸是谁或者判断输入人脸是否是数据库中的某个人。 人脸识别属于1:N的比对,输入人脸身份是1&…...

linux环境变量配置文件区别 /etc/profile和~/.bash_profile
在 Linux 系统中,环境变量可以定义用户会话的行为,而这些变量的加载和配置通常涉及多个文件,如 ~/.bash_profile 和 /etc/profile。这些文件的作用和加载时机各有不同。以下是对它们的详细区别和用途的说明: 文章目录 1. 环境变量…...

mac 配置 python 环境变量
最新 mac 电脑,配置原理暂未研究,欢迎答疑 方案一 获取python的安装路径 which python3 配置环境变量 open ~/.bash_profile 末尾添加: PATH"/Library/Frameworks/Python.framework/Versions/3.13/bin:${PATH}" export PATH …...
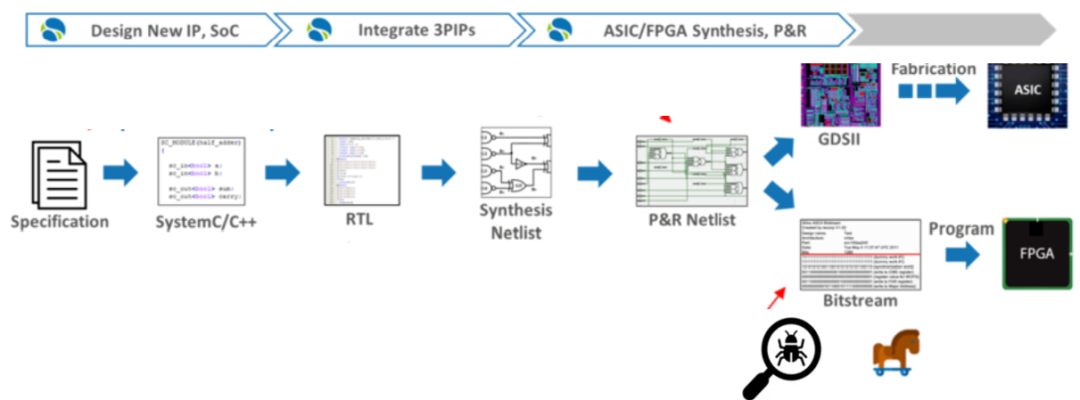
终极的复杂,是简单
软件仿真拥有最佳的信号可见性和调试灵活性,能够高效捕获很多显而易见的常见错误,被大多数工程师熟练使用。 空间领域应用的一套数据处理系统(Data Handling System),采用抗辐FPGA作为主处理器,片上资源只包含10752个寄存器,软仿也是个挺花时间的事。 Few ms might take …...
)
软件开发中的密码学(国密算法)
1.软件行业中的加解密 在软件行业中,加解密技术广泛应用于数据保护、通信安全、身份验证等多个领域。加密(Encryption)是将明文数据转换为密文的过程,而解密(Decryption)则是将密文恢复为明文的过程。以下…...

【豆包MarsCode 蛇年编程大作战】蛇形烟花
项目体验地址:项目体验地址 官方活动地址:活动地址 目录 【豆包MarsCode 蛇年编程大作战】蛇形烟花演示 引言 豆包 MarsCode介绍 项目准备 第一步:安装插件 第二步:点击豆包图标来进行使用豆包 使用豆包 MarsCodeAI助手实…...
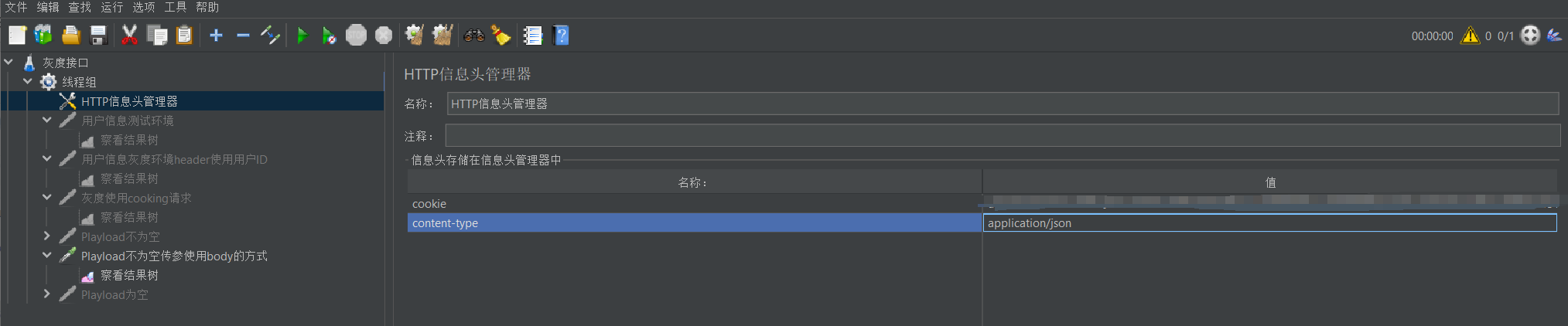
Jmeter使用Request URL请求接口
简介 在Jmeter调试接口时,有时不清楚后端服务接口的具体路径,可以使用Request URL和cookie来实现接口请求。以下内容以使用cookie鉴权的接口举例。 步骤 ① 登录网站后获取具体的Request URL和cookie信息 通过浏览器获取到Request URL和cookie&#…...

使用Pytest Fixtures来提升TestCase的可读性、高效性
关注开源优测不迷路 大数据测试过程、策略及挑战 测试框架原理,构建成功的基石 在自动化测试工作之前,你应该知道的10条建议 在自动化测试中,重要的不是工具 在编写单元测试时,你是否发现自己有很多重复代码? 数据库设…...
Arduino大师练成手册 -- 读取DHT11
要在 Arduino 上控制 DHT11 温湿度传感器,你可以按照以下步骤进行: 硬件连接: 将 DHT11 的 VCC 引脚连接到 Arduino 的 5V 引脚。 将 DHT11 的 GND 引脚连接到 Arduino 的 GND 引脚。 将 DHT11 的 DATA 引脚连接到 Arduino 的数字引脚&am…...

PostgreSQL CASE语句深度解析:性能、类型与NULL安全实战指南
1. 为什么你必须真正吃透 PostgreSQL 的 CASE 语句——它远不止是 SQL 里的“if-else”翻译器在 PostgreSQL 实战中,我见过太多人把CASE当成一个语法糖:写几个WHEN...THEN,加个ELSE,再套个END,就以为搞定了。结果呢&am…...

基于Arduino与应变片传感器的高精度厨房电子秤DIY全攻略
1. 项目概述:用Arduino打造一台高精度厨房电子秤作为一个喜欢在厨房里折腾的硬件爱好者,我经常遇到需要精确称量食材的场合。市面上的电子秤要么精度不够,要么价格不菲,要么功能单一。于是,我萌生了自己动手做一台的想…...

Wechat2RSS:微信公众号转RSS订阅工具
文章目录Wechat2RSS:微信公众号转RSS订阅工具Wechat2RSS:微信公众号转RSS订阅工具 ttttmr开源的Wechat2RSS项目,目前在GitHub上获得1409颗Star,项目地址为https://github.com/ttttmr/Wechat2RSS。该工具的核心作用是将微信公众号…...
重构)
嘈杂工业场景下的自适应VAD与双码本声纹识别鉴权系统:基于端侧轻量化神经网络与向量量化(VQ)重构
在大型化工车间、能源集控中心以及金融极密隔离库房中,离线声纹识别是物理访问控制和身份安全核验的重要生物特征屏障。然而,在环境本底噪声高达80dB以上的恶劣工业场景下,常规的语音活动检测(VAD)会频繁误触ÿ…...

孤舟笔记 互联网常用框架篇三 Dubbo是如何动态感知服务下线的?注册中心和服务端双保险
文章目录先说结论机制一:注册中心通知机制二:心跳检测机制三:连接事件感知机制四:定时拉取四种机制的协作回答技巧与点评加分回答面试官点评个人网站微服务环境下,服务实例随时可能上下线——重启、扩容、宕机……调用…...

开源 AI Agent Harness Engineering 框架全览:LangChain, AutoGPT, CrewAI 孰优孰劣?
开源 AI Agent Harness Engineering 框架全览:LangChain, AutoGPT, CrewAI 孰优孰劣? 关键词 AI Agent Harness Engineering、大语言模型编排(LLM Orchestration)、LangChain、AutoGPT、CrewAI、工具调用(Tool Calling)、多Agent协作、自主任务规划 摘要 随着大语言模型…...

sngan_projection论文解读:ICLR2018两大GAN技术的完美结合
sngan_projection论文解读:ICLR2018两大GAN技术的完美结合 【免费下载链接】sngan_projection GANs with spectral normalization and projection discriminator 项目地址: https://gitcode.com/gh_mirrors/sn/sngan_projection sngan_projection是一个实现了…...

通用物联网开发板设计:基于ESP8266的硬件集成与开发实践
1. 项目概述:为什么我们需要一块“通用”的物联网开发板?在捣鼓了几年物联网项目之后,我发现自己桌面上堆满了各种开发板:ESP8266、ESP32、Arduino Uno、STM32 Nucleo……每个项目都要重新连线、配置电源、焊接传感器接口…...

UE5项目打包后RenderTarget导出图片全黑?手把手教你解决伽马校正与资产打包问题
UE5打包后RenderTarget导出图片全黑的终极解决方案当你花了整整三天时间调试RenderTarget导出功能,终于在编辑器里看到完美的截图效果,却在打包成可执行文件后发现所有导出的图片都变成了一片漆黑——这种从云端跌入谷底的感觉,每个UE开发者都…...
)
【独家首发】Sora 2 AVI支持并非“开箱即用”:3层封装校验机制详解(RIFF→AVI→OpenCV Mat内存映射链路图解)
更多请点击: https://codechina.net 第一章:Sora 2 AVI支持并非“开箱即用”:核心矛盾与技术定位 Sora 2 的官方文档与发布说明中明确将 AVI 视为“实验性容器支持”,而非默认启用的输入格式。其底层解码栈基于 FFmpeg 5.1 构建&…...