“新月智能武器系统”CIWS,开启智能武器的新纪元

新月人物传记:人物传记之新月篇-CSDN博客
相关文章链接:星际战争模拟系统:新月的编程之道-CSDN博客
新月智能护甲系统CMIA--未来战场的守护者-CSDN博客
“新月之智”智能战术头盔系统(CITHS)-CSDN博客
目录
智能武器控制面板开发文档
一、项目概述
二、功能模块说明
三、代码结构说明
四、运行环境
五、安装与运行
六、代码示例
七、扩展功能
八、技术支持
智能武器控制面板开发文档
一、项目概述
“新月智能武器系统”(Crescent Intelligent Weapon System,简称CIWS)是一款以25世纪杰出女性科学家兼军事领袖——新月的名字命名的先进智能武器系统。该系统集成了最前沿的编程技术、人工智能和军事战略理念,旨在为现代战场提供高效、智能且精准的武器控制与作战支持。它不仅是武器系统的一次革命性突破,更是对新月在编程、人工智能和军事战略领域卓越成就的完美致敬。智能武器控制面板是一个基于Python和tkinter库开发的图形用户界面(GUI)应用程序,用于控制和管理智能武器系统的各项功能。该控制面板提供了功能开关、参数调整、目标优先级设置、硬件API接口、模块设计接口以及保存和加载参数等功能。
二、功能模块说明
(一)功能开关
功能开关区域提供了以下功能的开启和关闭:
-
自适应瞄准:根据环境参数(风速、风向、距离)自动调整瞄准参数。
-
目标优先级:对多个目标进行优先级排序,优先攻击高优先级目标。
-
智能弹药管理:根据任务需求自动选择最适合的弹药类型,并实时监控弹药数量。
-
远程控制:通过无线通信接收远程指令,控制武器系统。
-
数据记录:记录每次射击的相关数据(如目标类型、弹药类型、命中率等)。
(二)参数调整
参数调整区域允许用户调整以下参数:
-
风速:输入风速值(单位:米/秒),范围为0到10。
-
风向:输入风向角度(单位:度),范围为0到360。
-
目标距离:输入目标距离(单位:米),范围为0到1000。
-
应用参数:点击按钮将调整后的参数应用到武器系统。
(三)目标优先级设置
目标优先级设置区域允许用户对目标进行优先级排序:
-
目标列表:显示所有目标及其当前优先级。
-
优先级调整:通过滑动条设置目标的优先级(范围为1到10)。
-
设置优先级:点击按钮将调整后的优先级应用到目标。
(四)硬件API接口
硬件API接口区域用于发送指令到武器系统的硬件设备:
-
指令输入框:输入要发送的指令(如切换模式、选择弹药类型等)。
-
发送指令:点击按钮将指令发送到武器系统。
(五)模块设计接口
模块设计接口区域用于加载和管理功能模块:
-
模块列表:显示可用的模块列表(如自适应瞄准模块、目标优先级模块等)。
-
加载模块:选择一个模块并点击按钮加载该模块到武器系统。
(六)保存和加载参数
保存和加载参数区域允许用户保存当前设置并在需要时恢复:
-
保存参数:点击按钮将当前参数保存到文件(默认为JSON格式)。
-
加载参数:点击按钮从文件加载参数并应用到控制面板。
三、代码结构说明
(一)主类:SmartWeaponControlPanel
SmartWeaponControlPanel类是整个控制面板的核心,负责初始化界面、布局和功能绑定。它包含以下方法:
-
__init__:初始化控制面板,设置窗口标题和大小。 -
create_function_switches:创建功能开关区域。 -
create_parameter_adjustments:创建参数调整区域。 -
create_target_priority_section:创建目标优先级设置区域。 -
create_hardware_api_section:创建硬件API接口区域。 -
create_module_design_section:创建模块设计接口区域。 -
create_save_load_section:创建保存和加载参数区域。 -
apply_parameters:应用参数调整。 -
set_target_priority:设置目标优先级。 -
send_command:发送指令到硬件设备。 -
load_module:加载功能模块。 -
save_parameters:保存当前参数到文件。 -
load_parameters:从文件加载参数。
(二)智能武器类:SmartWeapon
SmartWeapon类是模拟智能武器系统的类,包含以下方法:
-
__init__:初始化智能武器系统。 -
adapt_to_environment:根据环境参数调整瞄准。 -
set_target_priority:设置目标优先级。 -
receive_remote_command:接收远程指令。
(三)辅助方法
-
messagebox.showinfo、messagebox.showwarning、messagebox.showerror:用于显示提示信息、警告信息和错误信息。 -
filedialog.asksaveasfilename、filedialog.askopenfilename:用于保存和加载参数文件。
四、运行环境
-
操作系统:Windows、macOS、Linux(支持Python的任何操作系统)
-
Python版本:Python 3.6及以上
-
依赖库:
tkinter(Python内置库)、json(Python内置库)
五、安装与运行
-
安装Python:
-
确保已安装Python 3.6及以上版本。可以从Python官网下载并安装。
-
-
运行程序:
-
将代码保存为一个
.py文件(例如smart_weapon_control_panel.py)。 -
打开终端或命令提示符,导航到保存文件的目录。
-
运行以下命令:
python smart_weapon_control_panel.py
-
六、代码示例
以下是完整的代码示例:
# 导入所需的模块
import tkinter as tk
from tkinter import ttk, messagebox, filedialog
import json# 定义智能武器类
class SmartWeapon:def __init__(self):# 初始化目标列表,包含目标的id、名称、类型和优先级self.targets = [{"id": 1, "name": "目标1", "type": "armor", "priority": 2},{"id": 2, "name": "目标2", "type": "airborne", "priority": 1}]# 根据环境参数调整瞄准def adapt_to_environment(self, wind_speed, wind_direction, distance):print(f"环境参数已调整:风速={wind_speed} m/s, 风向={wind_direction}°, 距离={distance} m")# 设置目标优先级def set_target_priority(self, targets):print("目标优先级已更新")# 接收远程指令def receive_remote_command(self, command):print(f"接收到远程指令:{command}")# 定义智能武器控制面板类
class SmartWeaponControlPanel:def __init__(self, master):# 初始化主窗口self.master = masterself.master.title("智能武器控制面板") # 设置窗口标题self.master.geometry("800x600") # 设置窗口大小# 创建智能武器实例self.weapon = SmartWeapon()# 创建功能开关区域self.create_function_switches()# 创建参数调整区域self.create_parameter_adjustments()# 创建目标优先级设置区域self.create_target_priority_section()# 创建硬件API接口区域self.create_hardware_api_section()# 创建模块设计接口区域self.create_module_design_section()# 创建保存和加载参数区域self.create_save_load_section()# 创建功能开关区域def create_function_switches(self):switch_frame = tk.LabelFrame(self.master, text="功能开关") # 创建功能开关的框架switch_frame.grid(row=0, column=0, padx=10, pady=10, sticky="nsew") # 设置框架的位置和布局# 创建自适应瞄准功能开关self.adapt_aim_var = tk.BooleanVar() # 定义一个布尔变量用于存储开关状态tk.Checkbutton(switch_frame, text="自适应瞄准", variable=self.adapt_aim_var).grid(row=0, column=0, padx=5, pady=5, sticky="w") # 创建复选框并放置# 创建目标优先级功能开关self.target_priority_var = tk.BooleanVar()tk.Checkbutton(switch_frame, text="目标优先级", variable=self.target_priority_var).grid(row=1, column=0, padx=5, pady=5, sticky="w")# 创建智能弹药管理功能开关self.smart_ammo_var = tk.BooleanVar()tk.Checkbutton(switch_frame, text="智能弹药管理", variable=self.smart_ammo_var).grid(row=2, column=0, padx=5, pady=5, sticky="w")# 创建远程控制功能开关self.remote_control_var = tk.BooleanVar()tk.Checkbutton(switch_frame, text="远程控制", variable=self.remote_control_var).grid(row=3, column=0, padx=5, pady=5, sticky="w")# 创建数据记录功能开关self.data_record_var = tk.BooleanVar()tk.Checkbutton(switch_frame, text="数据记录", variable=self.data_record_var).grid(row=4, column=0, padx=5, pady=5, sticky="w")# 创建参数调整区域def create_parameter_adjustments(self):param_frame = tk.LabelFrame(self.master, text="参数调整") # 创建参数调整的框架param_frame.grid(row=0, column=1, padx=10, pady=10, sticky="nsew") # 设置框架的位置和布局# 创建风速调整标签和滑动条tk.Label(param_frame, text="风速 (米/秒):").grid(row=0, column=0, padx=5, pady=5, sticky="w") # 创建标签并放置self.wind_speed_scale = tk.Scale(param_frame, from_=0, to=10, resolution=0.1, orient="horizontal") # 创建滑动条self.wind_speed_scale.grid(row=0, column=1, padx=5, pady=5, sticky="ew") # 放置滑动条# 创建风向调整标签和滑动条tk.Label(param_frame, text="风向 (度):").grid(row=1, column=0, padx=5, pady=5, sticky="w")self.wind_direction_scale = tk.Scale(param_frame, from_=0, to=360, resolution=1, orient="horizontal")self.wind_direction_scale.grid(row=1, column=1, padx=5, pady=5, sticky="ew")# 创建目标距离调整标签和滑动条tk.Label(param_frame, text="目标距离 (米):").grid(row=2, column=0, padx=5, pady=5, sticky="w")self.target_distance_scale = tk.Scale(param_frame, from_=0, to=1000, resolution=1, orient="horizontal")self.target_distance_scale.grid(row=2, column=1, padx=5, pady=5, sticky="ew")# 创建应用参数按钮tk.Button(param_frame, text="应用参数", command=self.apply_parameters).grid(row=3, column=0, columnspan=2, padx=5, pady=5, sticky="ew") # 创建按钮并绑定点击事件# 创建目标优先级设置区域def create_target_priority_section(self):priority_frame = tk.LabelFrame(self.master, text="目标优先级") # 创建目标优先级设置的框架priority_frame.grid(row=1, column=0, padx=10, pady=10, sticky="nsew") # 设置框架的位置和布局# 创建目标列表self.target_list = tk.Listbox(priority_frame, selectmode="single") # 创建列表框用于显示目标self.target_list.grid(row=0, column=0, padx=5, pady=5, sticky="nsew") # 放置列表框for target in self.weapon.targets: # 遍历目标列表并添加到列表框中self.target_list.insert(tk.END, f"{target['name']} (优先级: {target['priority']})")# 创建优先级调整标签和滑动条tk.Label(priority_frame, text="优先级:").grid(row=1, column=0, padx=5, pady=5, sticky="w")self.priority_scale = tk.Scale(priority_frame, from_=1, to=10, resolution=1, orient="horizontal")self.priority_scale.grid(row=1, column=1, padx=5, pady=5, sticky="ew")# 创建设置优先级按钮tk.Button(priority_frame, text="设置优先级", command=self.set_target_priority).grid(row=2, column=0, columnspan=2, padx=5, pady=5, sticky="ew")# 创建硬件API接口区域def create_hardware_api_section(self):hardware_frame = tk.LabelFrame(self.master, text="硬件API接口") # 创建硬件API接口的框架hardware_frame.grid(row=1, column=1, padx=10, pady=10, sticky="nsew") # 设置框架的位置和布局# 创建指令输入框tk.Label(hardware_frame, text="指令:").grid(row=0, column=0, padx=5, pady=5, sticky="w")self.command_entry = tk.Entry(hardware_frame)self.command_entry.grid(row=0, column=1, padx=5, pady=5, sticky="ew")# 创建发送指令按钮tk.Button(hardware_frame, text="发送指令", command=self.send_command).grid(row=1, column=0, columnspan=2, padx=5, pady=5, sticky="ew")# 创建模块设计接口区域def create_module_design_section(self):module_frame = tk.LabelFrame(self.master, text="模块设计接口") # 创建模块设计接口的框架module_frame.grid(row=2, column=0, columnspan=2, padx=10, pady=10, sticky="nsew") # 设置框架的位置和布局# 创建模块列表self.module_list = tk.Listbox(module_frame, selectmode="single")self.module_list.grid(row=0, column=0, padx=5, pady=5, sticky="nsew")self.module_list.insert(tk.END, "自适应瞄准模块")self.module_list.insert(tk.END, "目标优先级模块")self.module_list.insert(tk.END, "智能弹药管理模块")# 创建加载模块按钮tk.Button(module_frame, text="加载模块", command=self.load_module).grid(row=1, column=0, padx=5, pady=5, sticky="ew")# 创建保存和加载参数区域def create_save_load_section(self):save_load_frame = tk.LabelFrame(self.master, text="保存和加载参数") # 创建保存和加载参数的框架save_load_frame.grid(row=2, column=1, padx=10, pady=10, sticky="nsew") # 设置框架的位置和布局# 创建保存参数按钮tk.Button(save_load_frame, text="保存参数", command=self.save_parameters).grid(row=0, column=0, padx=5, pady=5, sticky="ew")# 创建加载参数按钮tk.Button(save_load_frame, text="加载参数", command=self.load_parameters).grid(row=0, column=1, padx=5, pady=5, sticky="ew")# 应用参数方法def apply_parameters(self):wind_speed = self.wind_speed_scale.get() # 获取风速滑动条的值wind_direction = self.wind_direction_scale.get() # 获取风向滑动条的值distance = self.target_distance_scale.get() # 获取目标距离滑动条的值self.weapon.adapt_to_environment(wind_speed, wind_direction, distance) # 调用武器系统的环境适应方法messagebox.showinfo("提示", "参数已应用") # 弹出提示信息# 设置目标优先级方法def set_target_priority(self):selected_index = self.target_list.curselection() # 获取目标列表中选中的索引if selected_index:target = self.weapon.targets[selected_index[0]] # 获取选中的目标priority = self.priority_scale.get() # 获取优先级滑动条的值target["priority"] = priority # 更新目标的优先级self.target_list.delete(selected_index[0]) # 更新目标列表显示self.target_list.insert(selected_index[0], f"{target['name']} (优先级: {priority})")self.weapon.set_target_priority(self.weapon.targets) # 调用武器系统的设置优先级方法messagebox.showinfo("提示", "目标优先级已更新")else:messagebox.showwarning("警告", "请选择一个目标")# 发送指令方法def send_command(self):command = self.command_entry.get() # 获取指令输入框的内容if command:try:self.weapon.receive_remote_command(eval(command)) # 调用武器系统的接收指令方法messagebox.showinfo("提示", "指令已发送")except Exception as e:messagebox.showerror("错误", f"发送指令失败: {e}")else:messagebox.showwarning("警告", "请输入指令")# 加载模块方法def load_module(self):selected_index = self.module_list.curselection() # 获取模块列表中选中的索引if selected_index:module_name = self.module_list.get(selected_index[0]) # 获取选中的模块名称messagebox.showinfo("提示", f"正在加载模块: {module_name}")# 模块加载的具体实现else:messagebox.showwarning("警告", "请选择一个模块")# 保存参数方法def save_parameters(self):params = {"wind_speed": self.wind_speed_scale.get(), # 获取风速滑动条的值"wind_direction": self.wind_direction_scale.get(), # 获取风向滑动条的值"target_distance": self.target_distance_scale.get(), # 获取目标距离滑动条的值"targets": self.weapon.targets # 获取目标列表}file_path = filedialog.asksaveasfilename(defaultextension=".json", filetypes=[("JSON files", "*.json")]) # 弹出文件保存对话框if file_path:with open(file_path, "w") as f: # 保存参数到文件json.dump(params, f)messagebox.showinfo("提示", "参数已保存")# 加载参数方法def load_parameters(self):file_path = filedialog.askopenfilename(filetypes=[("JSON files", "*.json")]) # 弹出文件打开对话框if file_path:with open(file_path, "r") as f: # 加载参数文件params = json.load(f)self.wind_speed_scale.set(params["wind_speed"]) # 设置风速滑动条的值self.wind_direction_scale.set(params["wind_direction"]) # 设置风向滑动条的值self.target_distance_scale.set(params["target_distance"]) # 设置目标距离滑动条的值self.weapon.targets = params["targets"] # 更新目标列表self.target_list.delete(0, tk.END) # 清空目标列表显示for target in self.weapon.targets: # 更新目标列表显示self.target_list.insert(tk.END, f"{target['name']} (优先级: {target['priority']})")messagebox.showinfo("提示", "参数已加载")# 主程序入口
if __name__ == "__main__":root = tk.Tk() # 创建主窗口app = SmartWeaponControlPanel(root) # 创建智能武器控制面板实例root.mainloop() # 启动主循环七、扩展功能
(一)模块加载
模块加载功能目前仅提供了一个接口,开发者可以根据需要实现具体的模块加载逻辑。例如,可以加载自定义的Python模块或调用外部API。
(二)硬件接口
硬件接口目前仅支持发送简单的指令。开发者可以根据实际硬件设备的API,扩展指令的格式和功能。
(三)数据记录
数据记录功能目前仅提供了一个开关。开发者可以扩展该功能,将记录的数据保存到文件或数据库中,以便后续分析。
八、技术支持
如在开发或使用过程中遇到问题,请联系技术支持团队获取帮助。
版本:1.0
日期:2025年2月1日
作者:暮雨哀尘
版权所有:暮雨哀尘
相关文章:
“新月智能武器系统”CIWS,开启智能武器的新纪元
新月人物传记:人物传记之新月篇-CSDN博客 相关文章链接:星际战争模拟系统:新月的编程之道-CSDN博客 新月智能护甲系统CMIA--未来战场的守护者-CSDN博客 “新月之智”智能战术头盔系统(CITHS)-CSDN博客 目录 智能武…...
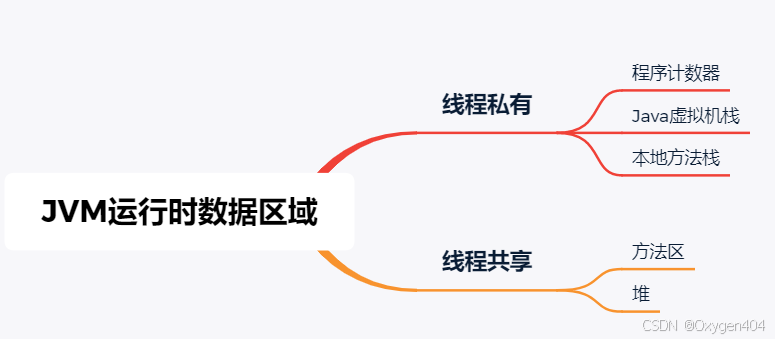
JVM运行时数据区域-附面试题
Java虚拟机在执行Java程序的过程中会把它所管理的内存划分为若干个不同的数据区域。这些区域 有各自的用途,以及创建和销毁的时间,有的区域随着虚拟机进程的启动而一直存在,有些区域则是 依赖用户线程的启动和结束而建立和销毁。 1. 程序计…...
增删改查(CRUD)操作
文章目录 MySQL系列:1.CRUD简介2.Create(创建)2.1单行数据全列插入2.2 单行数据指定插入2.3 多⾏数据指定列插⼊ 3.Retrieve(读取)3.1 Select查询3.1.1 全列查询3.1.2 指定列查询3.1.3 查询字段为表达式(都是临时表不会对原有表数据产生影响)…...

Vue.js `Suspense` 和异步组件加载
Vue.js Suspense 和异步组件加载 今天我们来聊聊 Vue 3 中的一个强大特性:<Suspense> 组件,以及它如何帮助我们更优雅地处理异步组件加载。如果你曾在 Vue 项目中处理过异步组件加载,那么这篇文章将为你介绍一种更简洁高效的方式。 什…...
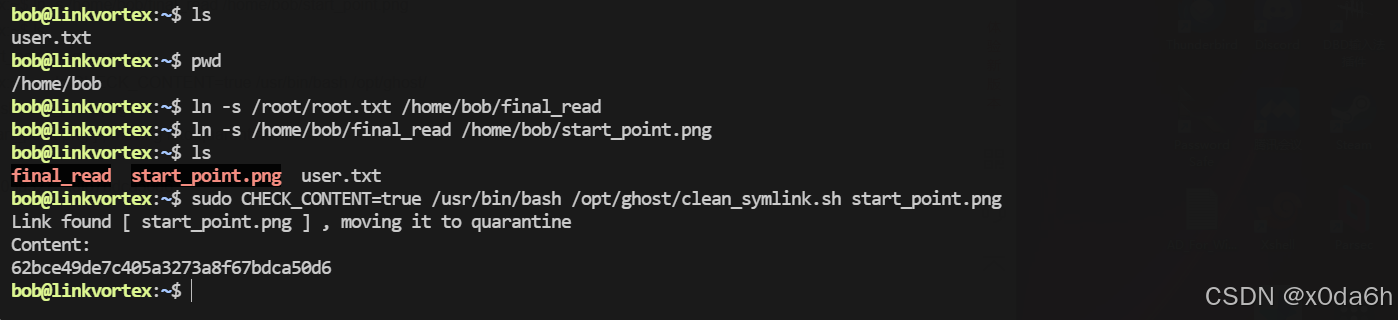
HTB:LinkVortex[WriteUP]
目录 连接至HTB服务器并启动靶机 信息收集 使用rustscan对靶机TCP端口进行开放扫描 使用nmap对靶机TCP开放端口进行脚本、服务扫描 使用nmap对靶机TCP开放端口进行漏洞、系统扫描 使用nmap对靶机常用UDP端口进行开放扫描 使用gobuster对靶机进行路径FUZZ 使用ffuf堆靶机…...

Linux命令入门
Linux命令入门 ls命令 ls命令的作用是列出目录下的内容,语法细节如下: 1s[-a -l -h] [Linux路径] -a -l -h是可选的选项 Linux路径是此命令可选的参数 当不使用选项和参数,直接使用ls命令本体,表示:以平铺形式,列出当前工作目录下的内容 ls命令的选项 -a -a选项&a…...
【问题】Chrome安装不受支持的扩展 解决方案
此扩展程序已停用,因为它已不再受支持 Chromium 建议您移除它。详细了解受支持的扩展程序 此扩展程序已停用,因为它已不再受支持 详情移除 解决 1. 解压扩展 2.打开manifest.json 3.修改版本 将 manifest_version 改为3及以上 {"manifest_ver…...
【题解】AtCoder Beginner Contest ABC391 D Gravity
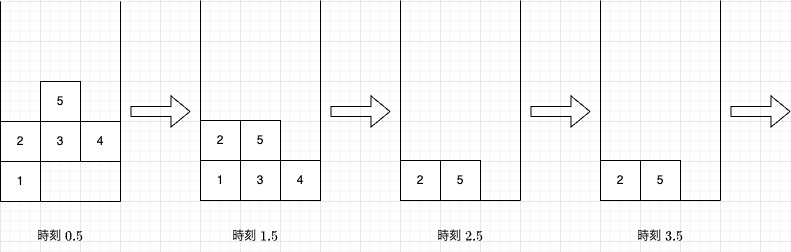
题目大意 原题面链接 在一个 1 0 9 W 10^9\times W 109W 的平面里有 N N N 个方块。我们用 ( x , y ) (x,y) (x,y) 表示第 x x x 列从下往上数的 y y y 个位置。第 i i i 个方块的位置是 ( x i , y i ) (x_i,y_i) (xi,yi)。现在执行无数次操作,每一次…...
使用 SpringBoot+Thymeleaf 模板引擎进行 Web 开发
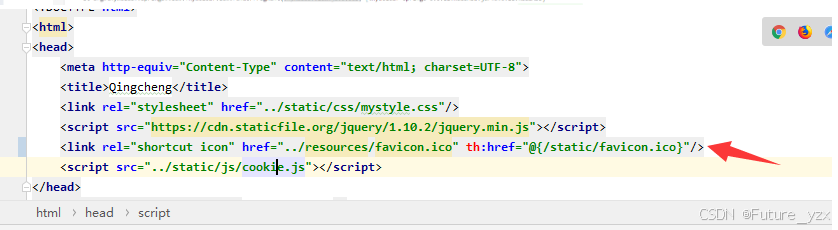
目录 一、什么是 Thymeleaf 模板引擎 二、Thymeleaf 模板引擎的 Maven 坐标 三、配置 Thymeleaf 四、访问页面 五、访问静态资源 六、Thymeleaf 使用示例 七、Thymeleaf 常用属性 前言 在现代 Web 开发中,模板引擎被广泛用于将动态内容渲染到静态页面中。Thy…...

【Java异步编程】CompletableFuture综合实战:泡茶喝水与复杂的异步调用
文章目录 一. 两个异步任务的合并:泡茶喝水二. 复杂的异步调用:结果依赖,以及异步执行调用等 一. 两个异步任务的合并:泡茶喝水 下面的代码中我们实现泡茶喝水。这里分3个任务:任务1负责洗水壶、烧开水,任…...

Nginx知识
nginx 精简的配置文件 worker_processes 1; # 可以理解为一个内核一个worker # 开多了可能性能不好events {worker_connections 1024; } # 一个 worker 可以创建的连接数 # 1024 代表默认一般不用改http {include mime.types;# 代表引入的配置文件# mime.types 在 ngi…...

Unity开发游戏使用XLua的基础
Unity使用Xlua的常用编码方式,做一下记录 1、C#调用lua 1、Lua解析器 private LuaEnv env new LuaEnv();//保持它的唯一性void Start(){env.DoString("print(你好lua)");//env.DoString("require(Main)"); 默认在resources文件夹下面//帮助…...
AI-ISP论文Learning to See in the Dark解读
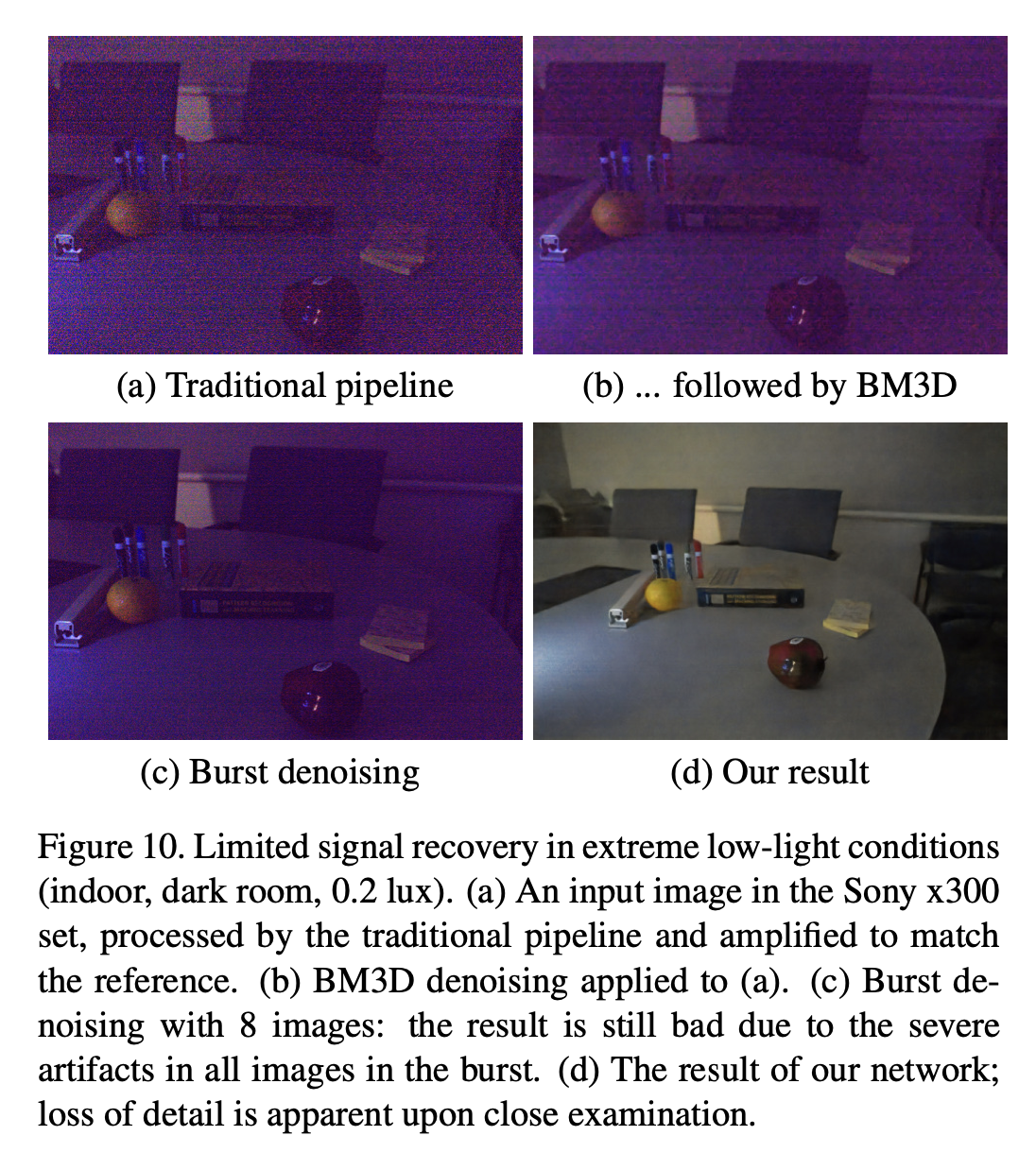
论文地址:Learning to See in the Dark 图1. 利用卷积网络进行极微光成像。黑暗的室内环境。相机处的照度小于0.1勒克斯。索尼α7S II传感器曝光时间为1/30秒。(a) 相机在ISO 8000下拍摄的图像。(b) 相机在ISO 409600下拍摄的图像。该图像存在噪点和色彩偏差。©…...
OpenCV:开运算
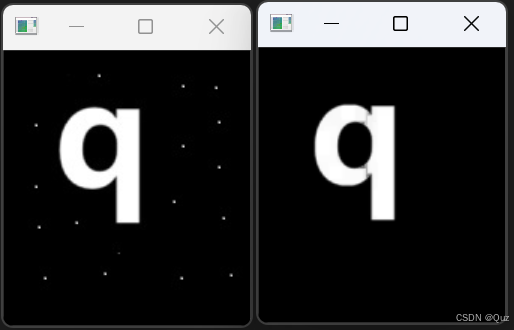
目录 1. 简述 2. 用腐蚀和膨胀实现开运算 2.1 代码示例 2.2 运行结果 3. 开运算接口 3.1 参数详解 3.2 代码示例 3.3 运行结果 4. 开运算应用场景 5. 注意事项 6. 总结 相关阅读 OpenCV:图像的腐蚀与膨胀-CSDN博客 OpenCV:闭运算-CSDN博客 …...

38. RTC实验
一、RTC原理详解 1、6U内部自带到了一个RTC外设,确切的说是SRTC。6U和6ULL的RTC内容在SNVS章节。6U的RTC分为LP和HP。LP叫做SRTC,HP是RTC,但是HP的RTC掉电以后数据就丢失了,即使用了纽扣电池也没用。所以必须要使用LP,…...

Flutter 新春第一弹,Dart 宏功能推进暂停,后续专注定制数据处理支持
在去年春节,Flutter 官方发布了宏(Macros)编程的原型支持, 同年的 5 月份在 Google I/O 发布的 Dart 3.4 宣布了宏的实验性支持,但是对于 Dart 内部来说,从启动宏编程实验开始已经过去了几年,但…...

巴菲特价值投资思想的核心原则
巴菲特价值投资思想的核心原则 关键词:安全边际、长期投资、内在价值、管理团队、经济护城河、简单透明 摘要:本文深入探讨了巴菲特价值投资思想的核心原则,包括安全边际、长期投资、企业内在价值、优秀管理团队、经济护城河和简单透明的业务…...

C 或 C++ 中用于表示常量的后缀:1ULL
1ULL 是一个在 C 或 C 中用于表示常量的后缀,它具体指示编译器将这个数值视为特定类型的整数。让我们详细解释一下: 1ULL 的含义 1: 这是最基本的部分,表示数值 1。U: 表示该数值是无符号(Unsigned)的。这意味着它只…...

vue3中el-input无法获得焦点的问题
文章目录 现象两次nextTick()加setTimeout()解决结论 现象 el-input被外层div包裹了,设置autofocus不起作用: <el-dialog v-model"visible" :title"title" :append-to-bodytrue width"50%"><el-form v-model&q…...
程序诗篇里的灵动笔触:指针绘就数据的梦幻蓝图<3>
大家好啊,我是小象٩(๑ω๑)۶ 我的博客:Xiao Xiangζั͡ޓއއ 很高兴见到大家,希望能够和大家一起交流学习,共同进步。 今天我们来对上一节做一些小补充,了解学习一下assert断言,指针的使用和传址调用…...

为AI编码代理构建确定性安全层:开源安全网关ai-sec实战指南
1. 项目概述:为AI编码代理构建确定性安全层如果你正在使用Claude Code、Cursor、Codex这类AI编码助手,或者正在开发基于LLM的自动化工作流,那么一个核心的痛点你一定深有体会:如何确保AI不会执行危险命令?当AI助手建议…...

光子KANs:电信组件构建的光学神经网络革命
1. 光子KANs:电信组件构建的光学神经网络革命 在AI算力需求爆炸式增长的今天,传统电子计算架构正面临带宽瓶颈和能耗墙的严峻挑战。当我第一次在实验室用示波器测量光学神经网络的响应时间时,23纳秒的延迟让我震惊——这比最好的GPU还要快三个…...

C语言中的strchr函数
strchr是string.h库中的函数,它的形式为: char * strchr (char * str, int character );功能: 返回一个指针,指向字符在 C 字符串 str 中第一次出现的位置。C 字符串末尾的空字符 \0 被视为字符串的一部分。因此,你也可…...

Seraphine:英雄联盟智能BP与战绩分析工具终极指南
Seraphine:英雄联盟智能BP与战绩分析工具终极指南 【免费下载链接】Seraphine 英雄联盟战绩查询工具 项目地址: https://gitcode.com/gh_mirrors/se/Seraphine 还在为英雄联盟排位赛的BP阶段感到焦虑吗?面对30秒的英雄选择倒计时,你是…...

深入解析ZYNQ启动流程:从Boot引脚到FSBL的完整路径
1. ZYNQ启动流程全景概览 当你第一次拿到一块ZYNQ开发板时,按下电源键后究竟发生了什么?这个问题困扰过很多嵌入式开发者。作为Xilinx推出的经典SoC芯片,ZYNQ的启动流程就像一场精心编排的交响乐,每个环节都环环相扣。我当年调试第…...
)
【Matlab】MATLAB教程:Simulink与MATLAB交互(MATLAB函数模块案例+混合编程仿真)
MATLAB教程:Simulink与MATLAB交互(MATLAB函数模块案例+混合编程仿真) 本教程适配MATLAB R2020a及以上版本,聚焦Simulink与MATLAB交互核心技能,以MATLAB函数模块为核心案例,详解混合编程仿真的全流程,无需深厚编程基础,纯实操导向、案例可直接复刻,适配高校课程设计、…...

Skeleton骨架系统:基于Tailwind CSS的现代前端UI架构实践
1. 项目概述:骨架系统在现代前端开发中的价值回归如果你在前端领域摸爬滚打了一段时间,尤其是深度使用过 Tailwind CSS,那么你很可能已经对“组件库”这三个字又爱又恨。爱的是它们能极大提升开发效率,恨的是它们往往伴随着沉重的…...

Symbol Opener:基于URI与LSP实现终端代码符号一键跳转
1. 项目概述:一个能让你在终端里“点击”代码符号的插件 如果你和我一样,每天大部分时间都泡在终端里,那你肯定遇到过这个场景:运行 git log 或者 grep 命令,终端输出了一堆函数名、类名,你想立刻跳转…...

基于MCP协议构建AI智能体安全工具箱:qirabot/mcp-server实战指南
1. 项目概述:一个为AI智能体提供“眼睛”和“手”的MCP服务器最近在折腾AI智能体(Agent)的开发,发现一个核心痛点:如何让这些智能体安全、可控地访问外部工具和数据?直接给它们开放网络或系统权限ÿ…...
NeoPixel灯环故障深度修复:从信号完整性到电源设计的嵌入式实践
1. 项目概述:从“小麻烦”到深度修复最近几周,我一直在愉快地捣鼓Adafruit的NeoPixel灯带和灯环,这东西确实好玩,单线控制、全彩可编程,简直是创客项目里的“瑞士军刀”。但就在我准备大干一场,用它们来打造…...