基于UKF-IMM无迹卡尔曼滤波与交互式多模型的轨迹跟踪算法matlab仿真,对比EKF-IMM和UKF
目录
1.程序功能描述
2.测试软件版本以及运行结果展示
3.核心程序
4.本算法原理
5.完整程序
1.程序功能描述
基于UKF-IMM无迹卡尔曼滤波与交互式多模型的轨迹跟踪算法matlab仿真,对比EKF-IMM和UKF。
2.测试软件版本以及运行结果展示
MATLAB2022A版本运行





3.核心程序
.............................................................................
% 绘制目标运动与传感器分布的图形,展示 IMM - UKF 算法的跟踪效果
%目标运动与传感器分布
figure
% 绘制目标的真实轨迹
plot(TargetState(1,:),TargetState(4,:),'k','LineWidth',2);
hold on
% 循环处理每个节点
for i = 1:NumberNode% 绘制 IMM - UKF 算法的状态估计轨迹plot(Xfstate(1,:),Xfstate(4,:),'-mo',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.5,0.9,0.0]);hold on% 绘制真实节点的位置plot(NodeDistribution(1,i),NodeDistribution(2,i),'bo','LineWidth',1);hold on% 在节点位置旁边标注节点编号text(NodeDistribution(1,i)+0.5,NodeDistribution(2,i)+0.5,num2str(i));hold on% 绘制 IMM - UKF 算法估计的节点位置plot(pest(1,i),pest(2,i),'rs','LineWidth',1);hold on% 添加图例说明不同线条和标记的含义legend('真实轨迹','IMM-UKF估计轨迹','真实节点','IMM-UKF节点');% 设置图形标题title('跟踪效果对比');
end
% 设置坐标轴为正方形,使图形比例合适
axis square% 绘制目标运动与传感器分布的图形,展示 IMM - EKF 算法的跟踪效果
figure
% 绘制目标的真实轨迹
plot(TargetState(1,:),TargetState(4,:),'k','LineWidth',2);
hold on
% 循环处理每个节点
for i = 1:NumberNode% 绘制 IMM - EKF 算法的状态估计轨迹plot(Xfstate2(1,:),Xfstate2(4,:),'-mo',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.5,0.9,0.0]);hold on% 绘制真实节点的位置plot(NodeDistribution(1,i),NodeDistribution(2,i),'bo','LineWidth',1);hold on% 在节点位置旁边标注节点编号text(NodeDistribution(1,i)+0.5,NodeDistribution(2,i)+0.5,num2str(i));hold on% 绘制 IMM - EKF 算法估计的节点位置plot(pest2(1,i),pest2(2,i),'rs','LineWidth',1);hold on% 添加图例说明不同线条和标记的含义legend('真实轨迹','IMM-EKF估计轨迹','真实节点','IMM-EKF节点');% 设置图形标题title('跟踪效果对比');
end
% 设置坐标轴为正方形,使图形比例合适
axis square% 绘制目标运动与传感器分布的图形,展示 UKF 算法的跟踪效果
figure
% 绘制目标的真实轨迹
plot(TargetState(1,:),TargetState(4,:),'k','LineWidth',2);
hold on
% 循环处理每个节点
for i = 1:NumberNode% 绘制 UKF 算法的状态估计轨迹plot(Para_sensor3(1,:),Para_sensor3(4,:),'-mo',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.5,0.9,0.0]);hold on% 绘制真实节点的位置plot(NodeDistribution(1,i),NodeDistribution(2,i),'bo','LineWidth',1);hold on% 在节点位置旁边标注节点编号text(NodeDistribution(1,i)+0.5,NodeDistribution(2,i)+0.5,num2str(i));hold on% 绘制 UKF 算法估计的节点位置plot(pest3(1,i),pest3(2,i),'rs','LineWidth',1);hold on% 添加图例说明不同线条和标记的含义legend('真实轨迹','UKF估计轨迹','真实节点','UKF节点');% 设置图形标题title('跟踪效果对比');
end
% 设置坐标轴为正方形,使图形比例合适
axis square% 绘制不同算法的误差随时间变化的曲线
figure
% 绘制 IMM - UKF 算法的误差曲线
plot(tms,err1(1,:),'-bs',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.0,0.0]);
hold on;
% 绘制 IMM - EKF 算法的误差曲线
plot(tms,err2(1,:),'-mo',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.5,0.9,0.0]);
hold on;
% 绘制 UKF 算法的误差曲线
plot(tms,err3(1,:),'-r>',...'LineWidth',1,...'MarkerSize',6,...'MarkerEdgeColor','k',...'MarkerFaceColor',[0.9,0.9,0.0]);
hold on;
% 添加图例,说明不同曲线对应的算法
legend('IMM - UKF ','IMM - EKF','UKF');
% 设置 x 轴标签为时间步
xlabel('Time Steps')
% 设置 y 轴标签为误差
ylabel('error')% 绘制不同算法的平均误差柱状图
figure
% 绘制三个算法的平均误差柱状图
bar([mean(err1(1,:)),mean(err2(1,:)),mean(err3(1,:))]);
% 设置 x 轴标签,说明每个柱子对应的算法
xlabel(['1:IMM - UKF, 2:IMM - EKF, 3:UKF']);
% 设置 y 轴标签为误差
ylabel('error')
934.本算法原理
在许多工程实践中,往往不能直接得到所需要的状态变量的真实值。例如雷达在探测目标时,可以通过回波信号等计算出目标的距离、速度和角度等信息。但雷达探测过程中会存在干扰(系统噪声、地杂波和非目标信号等)的问题,这些干扰会导致回波信号中夹杂有随机噪声。我们要在有随机噪声的回波信号中分离目标的运动状态量,准确的得到这个状态量往往是不可能的,只能根据观测信号估计这些状态变量。卡尔曼滤波就是这种通过估计或预测降低噪声影响的一种好的方法。特别是在线性系统中,卡尔曼滤波是最优的滤波算法。
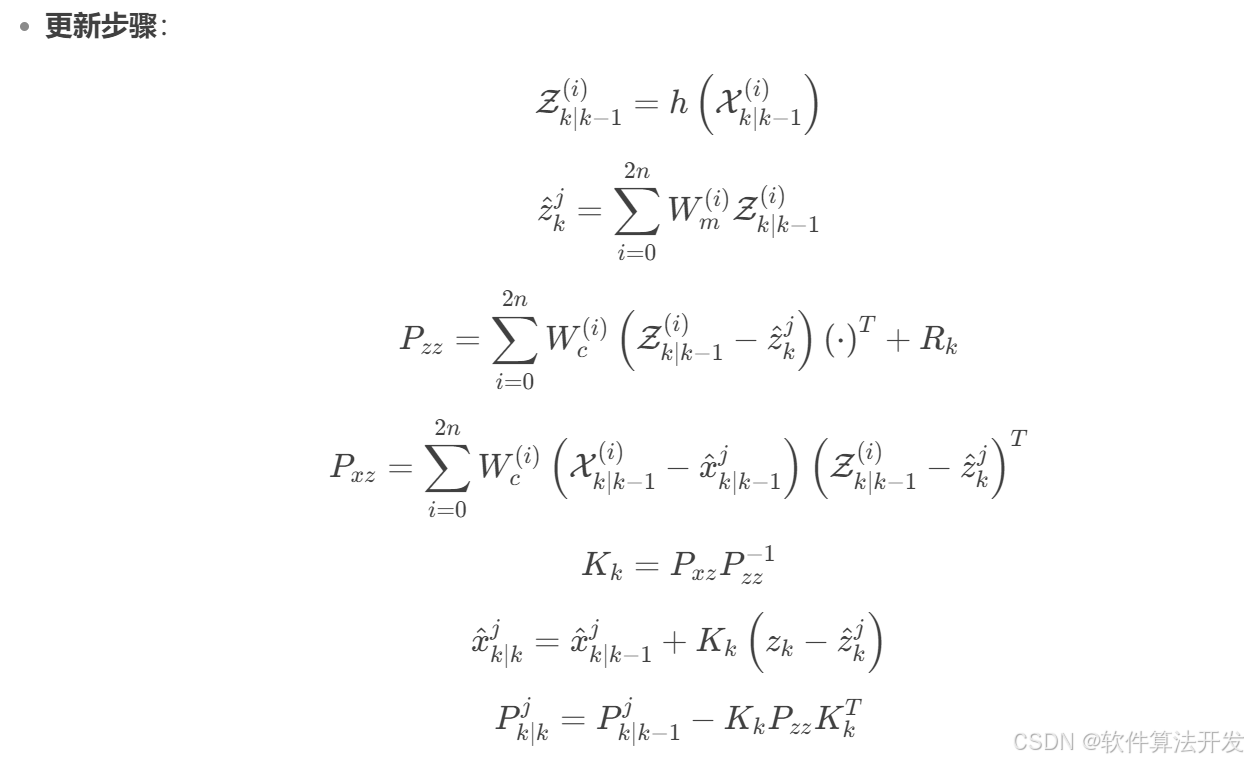
在轨迹跟踪问题中,系统状态通常随时间变化,并且受到过程噪声的影响;同时,对系统状态的观测也包含观测噪声。我们的目标是根据一系列的观测值来估计系统的真实状态。UKF 是一种用于非线性系统状态估计的滤波算法。与传统的扩展卡尔曼滤波(EKF)不同,UKF 不依赖于对非线性函数的线性化,而是通过一组确定性采样点(Sigma 点)来近似状态的概率分布,从而更准确地处理非线性问题。
在kalman滤波算法中用到了状态转移方程和量测方程,被估计量随着时间的变化,呈现的是一个动态估计。在目标跟踪中,不需要知道目标的运动模型就能实时的修正目标的状态变量(速度、距离等),具有良好的适应性。但是当目标实施机动变化(突然加、减速或急转弯等),仅仅采用基本的kalman滤波算法往往得不到理想的结果。这时就需要采用自适应算法。交互多模型(IMM)就应用而生。
目标交互多模型kalman滤波算法在机动目标跟踪领域得到广泛应用。IMM算法使用两个或者多个模型来描述工作过程中可能出现的状态,最后通过有效的加权融合进行系统状态估计,很好的克服了单个模型估计误差较大的问题。
IMM 算法用于处理系统在不同模式下运行的情况。它假设系统存在多个可能的运行模式,每个模式对应一个不同的状态模型,通过在这些模型之间进行交互和切换,以适应系统模式的变化,从而提高状态估计的准确性。




5.完整程序
VVV
相关文章:
基于UKF-IMM无迹卡尔曼滤波与交互式多模型的轨迹跟踪算法matlab仿真,对比EKF-IMM和UKF
目录 1.程序功能描述 2.测试软件版本以及运行结果展示 3.核心程序 4.本算法原理 5.完整程序 1.程序功能描述 基于UKF-IMM无迹卡尔曼滤波与交互式多模型的轨迹跟踪算法matlab仿真,对比EKF-IMM和UKF。 2.测试软件版本以及运行结果展示 MATLAB2022A版本运行 3.核心程序 .…...

分布式事务组件Seata简介与使用,搭配Nacos统一管理服务端和客户端配置
文章目录 一. Seata简介二. 官方文档三. Seata分布式事务代码实现0. 环境简介1. 添加undo_log表2. 添加依赖3. 添加配置4. 开启Seata事务管理5. 启动演示 四. Seata Server配置Nacos1. 修改配置类型2. 创建Nacos配置 五. Seata Client配置Nacos1. 增加Seata关联Nacos的配置2. 在…...

JavaScript常用的内置构造函数
JavaScript作为一种广泛应用的编程语言,提供了丰富的内置构造函数,帮助开发者处理不同类型的数据和操作。这些内置构造函数在创建和操作对象时非常有用。本文将详细介绍JavaScript中常用的内置构造函数及其用途。 常用内置构造函数概述 1. Object Obj…...
25寒假算法刷题 | Day1 | LeetCode 240. 搜索二维矩阵 II,148. 排序链表
目录 240. 搜索二维矩阵 II题目描述题解 148. 排序链表题目描述题解 240. 搜索二维矩阵 II 点此跳转题目链接 题目描述 编写一个高效的算法来搜索 m x n 矩阵 matrix 中的一个目标值 target 。该矩阵具有以下特性: 每行的元素从左到右升序排列。每列的元素从上到…...

MQTT知识
MQTT协议 MQTT 是一种基于发布/订阅模式的轻量级消息传输协议,专门针对低带宽和不稳定网络环境的物联网应用而设计,可以用极少的代码为联网设备提供实时可靠的消息服务。MQTT 协议广泛应用于物联网、移动互联网、智能硬件、车联网、智慧城市、远程医疗、…...

【机器学习与数据挖掘实战】案例11:基于灰色预测和SVR的企业所得税预测分析
【作者主页】Francek Chen 【专栏介绍】 ⌈ ⌈ ⌈机器学习与数据挖掘实战 ⌋ ⌋ ⌋ 机器学习是人工智能的一个分支,专注于让计算机系统通过数据学习和改进。它利用统计和计算方法,使模型能够从数据中自动提取特征并做出预测或决策。数据挖掘则是从大型数据集中发现模式、关联…...
新一代搜索引擎,是 ES 的15倍?
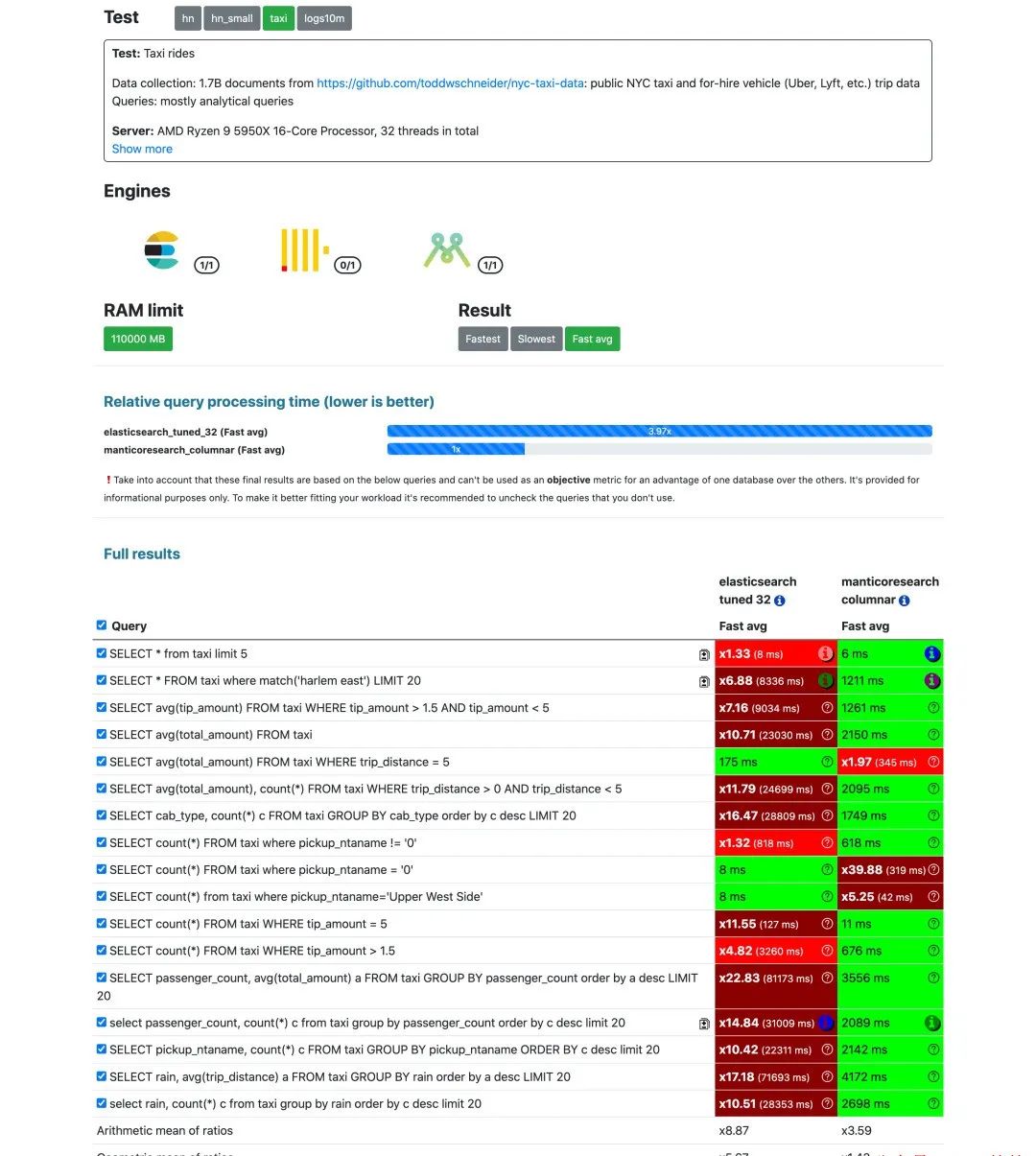
Manticore Search介绍 Manticore Search 是一个使用 C 开发的高性能搜索引擎,创建于 2017 年,其前身是 Sphinx Search 。Manticore Search 充分利用了 Sphinx,显着改进了它的功能,修复了数百个错误,几乎完全重写了代码…...

使用 Context API 管理临时状态,避免 Redux/Zustand 的持久化陷阱
在开发 React Native 应用时,我们经常需要管理全局状态,比如用户信息、主题设置、网络状态等。而对于某些临时状态,例如 数据同步进行中的状态 (isSyncing),我们应该选择什么方式来管理它? 在项目开发过程中ÿ…...
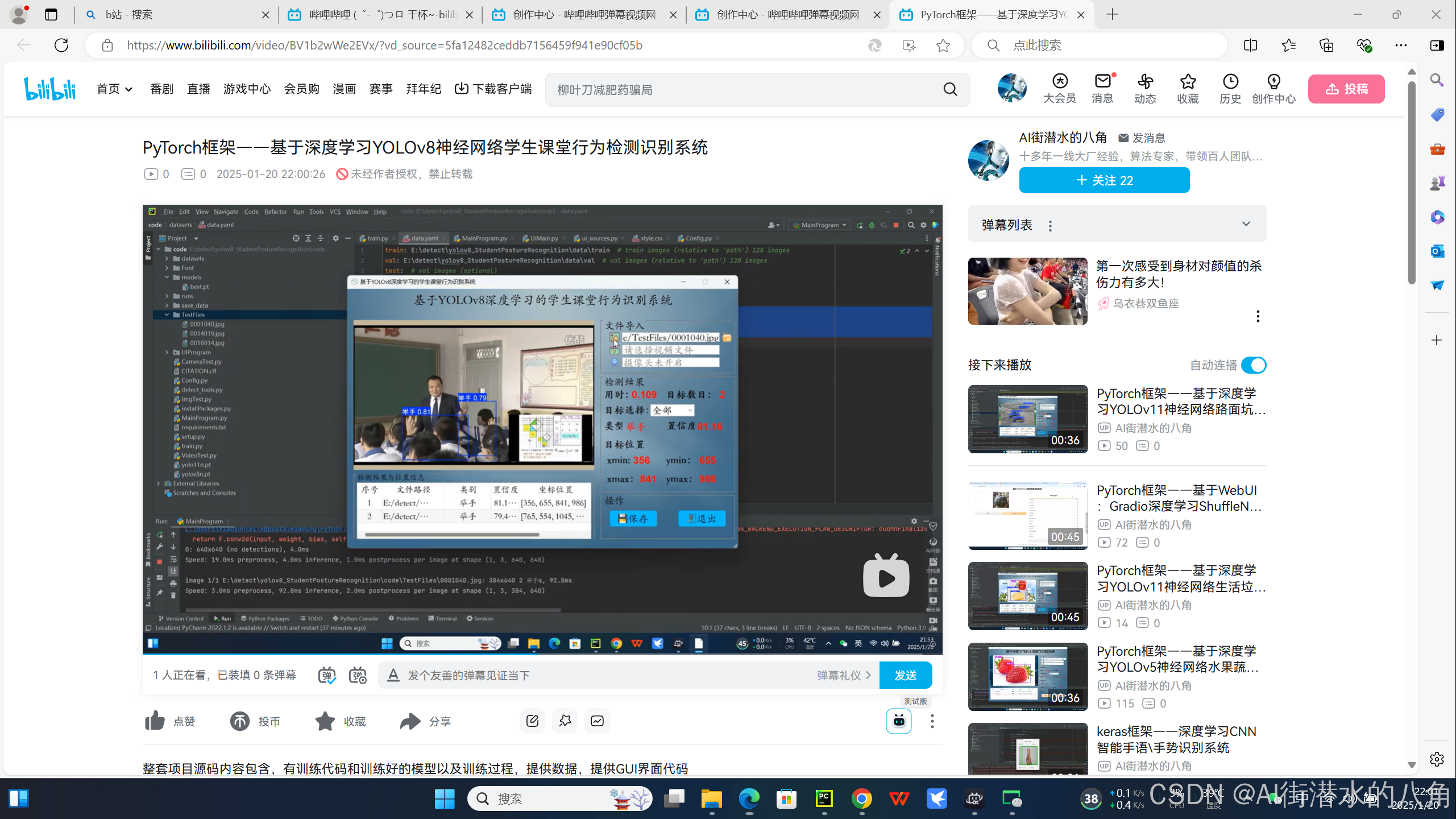
PyTorch框架——基于深度学习YOLOv8神经网络学生课堂行为检测识别系统
基于YOLOv8深度学习的学生课堂行为检测识别系统,其能识别三种学生课堂行为:names: [举手, 读书, 写字] 具体图片见如下: 第一步:YOLOv8介绍 YOLOv8 是 ultralytics 公司在 2023 年 1月 10 号开源的 YOLOv5 的下一个重大更新版本…...
word2vec 实战应用介绍
Word2Vec 是一种由 Google 在 2013 年推出的重要词嵌入模型,通过将单词映射为低维向量,实现了对自然语言处理任务的高效支持。其核心思想是利用深度学习技术,通过训练大量文本数据,将单词表示为稠密的向量形式,从而捕捉单词之间的语义和语法关系。以下是关于 Word2Vec 实战…...

C# 操作符重载对象详解
.NET学习资料 .NET学习资料 .NET学习资料 一、操作符重载的概念 在 C# 中,操作符重载允许我们为自定义的类或结构体定义操作符的行为。通常,我们熟悉的操作符,如加法()、减法(-)、乘法&#…...

python学opencv|读取图像(五十四)使用cv2.blur()函数实现图像像素均值处理
【1】引言 前序学习进程中,对图像的操作均基于各个像素点上的BGR值不同而展开。 对于彩色图像,每个像素点上的BGR值为三个整数,因为是三通道图像;对于灰度图像,各个像素上的BGR值是一个整数,因为这是单通…...
: 非极大值抑制(Non-Maximum Suppression, NMS))
CNN的各种知识点(四): 非极大值抑制(Non-Maximum Suppression, NMS)
非极大值抑制(Non-Maximum Suppression, NMS) 1. 非极大值抑制(Non-Maximum Suppression, NMS)概念:算法步骤:具体例子:PyTorch实现: 总结: 1. 非极大值抑制(…...

虚幻基础16:locomotion direction
locomotion locomotion:角色运动系统的总称:包含移动、奔跑、跳跃、转向等。 locomotion direction 玩家输入 玩家输入:通常代表玩家想要的移动方向。 direction 可以计算当前朝向与移动方向的Δ。从而实现朝向与移动(玩家输入)方向的分…...

C++游戏开发实战:从引擎架构到物理碰撞
📝个人主页🌹:一ge科研小菜鸡-CSDN博客 🌹🌹期待您的关注 🌹🌹 1. 引言 C 是游戏开发中最受欢迎的编程语言之一,因其高性能、低延迟和强大的底层控制能力,被广泛用于游戏…...

代理模式——C++实现
目录 1. 代理模式简介 2. 代码示例 1. 代理模式简介 代理模式是一种行为型模式。 代理模式的定义:由于某些原因需要给某对象提供一个代理以控制该对象的访问。这时,访问对象不适合或者不能直接访问引用目标对象,代理对象作为访问对象和目标…...

什么情况下,C#需要手动进行资源分配和释放?什么又是非托管资源?
扩展:如何使用C#的using语句释放资源?什么是IDisposable接口?与垃圾回收有什么关系?-CSDN博客 托管资源的回收有GC自动触发,而非托管资源需要手动释放。 在 C# 中,非托管资源是指那些不由 CLR(…...

LeetCode 2909. 元素和最小的山形三元组 II
**### LeetCode 2909. 元素和最小的山形三元组 II 问题描述 给定一个下标从 0 开始的整数数组 nums,我们需要找到一个“山形三元组”(i, j, k)满足以下条件: i < j < knums[i] < nums[j] 且 nums[k] < nums[j] 并…...

搬迁至bilibili声明
我将搬迁到bilibili ,用户名:北苏清风 在这个用户名上的文章部分将出自csdn的这个账号,均属于本人原创...

【周易哲学】生辰八字入门讲解(八)
😊你好,我是小航,一个正在变秃、变强的文艺倾年。 🔔本文讲解【周易哲学】生辰八字入门讲解,期待与你一同探索、学习、进步,一起卷起来叭! 目录 一、六亲女命六亲星六亲宫位相互关系 男命六亲星…...

UPS Ground运输时间估算:从纽约10013到全美各区域的实操指南
1. 物流时间估算的核心价值与挑战在电商和供应链的世界里,时间就是金钱,而运输时间则是连接承诺与现实的桥梁。无论是作为卖家管理客户预期,还是作为买家规划项目进度,一个相对准确的运输时间预估都至关重要。UPS Ground作为美国境…...

XSS-Game 实战解析:从Level1到Level18的攻防思维演进
1. XSS-Game入门:理解基础注入逻辑 第一次接触XSS-Game时,很多人会疑惑这到底是个什么游戏。简单来说,这是一个专门设计用来练习XSS(跨站脚本攻击)技术的在线靶场,包含18个难度递增的关卡。每个关卡都模拟了…...

如何用Python在5分钟内自动解析简历关键信息?PyResParser终极指南
如何用Python在5分钟内自动解析简历关键信息?PyResParser终极指南 【免费下载链接】pyresparser A simple resume parser used for extracting information from resumes 项目地址: https://gitcode.com/gh_mirrors/py/pyresparser 在招聘高峰期,…...

ADC选型新思路:从抗混叠架构革新到极致集成设计
1. 从“采样”到“混叠”:一个老问题的现代解法做信号链设计,ADC选型永远是绕不开的核心。这些年,从工业物联网的传感器节点到汽车雷达的信号处理板,我经手过不少项目,一个深刻的体会是:系统性能的瓶颈&…...

ARM GICv3虚拟中断控制器架构与ICV_CTLR_EL1寄存器解析
1. ARM GICv3虚拟中断控制器架构概述在ARMv8-A架构的虚拟化环境中,GICv3中断控制器通过引入虚拟CPU接口寄存器组,为虚拟机提供了与原生物理中断处理机制高度一致的虚拟中断体验。这套虚拟寄存器组与物理寄存器组采用相同的编程模型,但在访问控…...

智能硬件开发实战:从核心架构到产品落地的全流程解析
1. 智能硬件:从概念到现实的产业全景透视提起“智能硬件”,很多朋友可能觉得这是个离自己生活有点距离的高科技词汇。但如果说“智能手机”,那几乎无人不知,无人不晓。其实,智能硬件和智能手机在本质上是一脉相承的&am…...

破解软件安全计划人才困局:从安全左移到DevSecOps实践
1. 软件安全计划(SSI)的困境与破局:从一份调查报告说起 最近,一份由新思科技(Synopsys)在中国市场发起的调查报告,在不少技术管理者的圈子里引发了讨论。报告里一个刺眼的数字是: 6…...

观察不同模型在Taotoken平台上的实际Token消耗速率
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察不同模型在Taotoken平台上的实际Token消耗速率 对于依赖大模型API进行开发的团队和个人而言,成本控制是一个持续关…...

开源破产法知识库:从实务场景到技术架构的深度解析与应用指南
1. 项目概述:一个律师的破产法知识库最近在GitHub上看到一个挺有意思的项目,叫zhang-lawyer-org/zhang-bankruptcy。光看这个名字,你大概能猜到,这是一个跟破产法相关的知识库,而且很可能是一位张律师(或张…...

深度实战:在Linux系统上免费运行Adobe Illustrator CC的高效开源方案
深度实战:在Linux系统上免费运行Adobe Illustrator CC的高效开源方案 【免费下载链接】illustratorCClinux Illustrator CC v17 installer for Gnu/Linux 项目地址: https://gitcode.com/gh_mirrors/il/illustratorCClinux 对于Linux用户而言,专业…...