学习笔记:在华为云ModelArts上运行MindSpore扩散模型教程
目录
一、背景与目的
二、环境搭建
三、模型原理学习
1. 类定义与初始化
2. 初始卷积层
3. 时间嵌入模块
4. 下采样模块
5. 中间模块
6. 上采样模块
7. 最终卷积层
8. 前向传播
9. 关键点总结
四、代码实现与运行
五、遇到的问题及解决方法
六、总结与展望
教程来源:MindSpore
一、背景与目的
最近对生成模型非常感兴趣,尤其是扩散模型(Diffusion Models),它在图像生成等领域取得了显著成果。为了深入理解扩散模型的原理和实现,我选择在华为云的ModelArts平台上运行MindSpore官方提供的扩散模型教程。希望通过这次实践,能够掌握扩散模型的基本架构、训练过程以及生成图像的原理。
二、环境搭建
- 华为云ModelArts平台:注册并登录华为云账号,创建一个ModelArts项目,选择合适的计算资源(如GPU资源)。

创建一个notebook

选择好AI框架的镜像,再选择GPU模式,磁盘存储默认即可
- MindSpore框架:在ModelArts环境中安装MindSpore框架。可以通过华为云提供的镜像或手动安装MindSpore来完成。

这里我选择在镜像市场拉了一个mindspore2.0版本的镜像
- 依赖库安装:根据教程要求,安装所需的依赖库,如numpy、matplotlib、tqdm等。在ModelArts的Jupyter Notebook环境中,使用pip install命令进行安装。
三、模型原理学习
- 扩散模型概述:扩散模型是一种生成模型,通过逐步添加噪声将数据分布转换为简单分布(如高斯分布),然后通过学习逆向去噪过程生成数据样本。它包括正向扩散过程和逆向去噪过程。正向过程是将高斯噪声逐渐添加到图像中,直到变成纯噪声;逆向过程是通过神经网络从纯噪声逐渐去噪,最终生成实际图像。
- 前向过程与逆向过程:
- 前向过程:根据预定义的方差计划,在每个时间步长添加高斯噪声。使用公式q(xt ∥xt−1 )=N(xt ;1−βt xt−1 ,βt I)来实现噪声的添加。
- 逆向过程:利用神经网络学习条件概率分布pθ (xt−1 ∥xt ),通过优化目标函数(如均方误差)来训练神经网络预测噪声,从而实现去噪。
- U-Net神经网络:教程中使用U-Net作为神经网络架构,它包含编码器、解码器和瓶颈层,通过残差连接改善梯度流。U-Net能够接收带噪声的图像,并预测添加到输入中的噪声,从而实现逆向去噪。
class Unet(nn.Cell):def __init__(
self,
dim,
init_dim=None,
out_dim=None,
dim_mults=(1, 2, 4, 8),
channels=3,
with_time_emb=True,
convnext_mult=2,):super().__init__() self.channels = channels init_dim = default(init_dim, dim // 3 * 2)
self.init_conv = nn.Conv2d(channels, init_dim, 7, padding=3, pad_mode="pad", has_bias=True) dims = [init_dim, *map(lambda m: dim * m, dim_mults)]
in_out = list(zip(dims[:-1], dims[1:])) block_klass = partial(ConvNextBlock, mult=convnext_mult)if with_time_emb:
time_dim = dim * 4
self.time_mlp = nn.SequentialCell(
SinusoidalPositionEmbeddings(dim),
nn.Dense(dim, time_dim),
nn.GELU(),
nn.Dense(time_dim, time_dim),)else:
time_dim = None
self.time_mlp = None self.downs = nn.CellList([])
self.ups = nn.CellList([])
num_resolutions = len(in_out)for ind, (dim_in, dim_out) in enumerate(in_out):
is_last = ind >= (num_resolutions - 1) self.downs.append(
nn.CellList([
block_klass(dim_in, dim_out, time_emb_dim=time_dim),
block_klass(dim_out, dim_out, time_emb_dim=time_dim),
Residual(PreNorm(dim_out, LinearAttention(dim_out))),
Downsample(dim_out) if not is_last else nn.Identity(),])) mid_dim = dims[-1]
self.mid_block1 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)
self.mid_attn = Residual(PreNorm(mid_dim, Attention(mid_dim)))
self.mid_block2 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)for ind, (dim_in, dim_out) in enumerate(reversed(in_out[1:])):
is_last = ind >= (num_resolutions - 1) self.ups.append(
nn.CellList([
block_klass(dim_out * 2, dim_in, time_emb_dim=time_dim),
block_klass(dim_in, dim_in, time_emb_dim=time_dim),
Residual(PreNorm(dim_in, LinearAttention(dim_in))),
Upsample(dim_in) if not is_last else nn.Identity(),])) out_dim = default(out_dim, channels)
self.final_conv = nn.SequentialCell(
block_klass(dim, dim), nn.Conv2d(dim, out_dim, 1))def construct(self, x, time):
x = self.init_conv(x) t = self.time_mlp(time) if exists(self.time_mlp) else None h = []for block1, block2, attn, downsample in self.downs:
x = block1(x, t)
x = block2(x, t)
x = attn(x)
h.append(x) x = downsample(x) x = self.mid_block1(x, t)
x = self.mid_attn(x)
x = self.mid_block2(x, t) len_h = len(h) - 1for block1, block2, attn, upsample in self.ups:
x = ops.concat((x, h[len_h]), 1)
len_h -= 1
x = block1(x, t)
x = block2(x, t)
x = attn(x) x = upsample(x)return self.final_conv(x)
引用自Diffusion扩散模型 — MindSpore master documentation
解析:
条件 U-Net 神经网络,用于扩散模型中的逆向去噪过程。
1. 类定义与初始化
class Unet(nn.Cell):def __init__(
self,
dim,
init_dim=None,
out_dim=None,
dim_mults=(1, 2, 4, 8),
channels=3,
with_time_emb=True,
convnext_mult=2,):super().__init__()
- Unet 类:继承自 MindSpore 的 nn.Cell,表示这是一个神经网络模块。
- 参数说明:
- dim:基础维度,用于控制网络中卷积层的通道数。
- init_dim:初始卷积层的输出通道数,默认为 dim // 3 * 2。
- out_dim:最终输出的通道数,默认为输入图像的通道数(channels)。
- dim_mults:一个元组,表示每个分辨率级别上的通道数放大倍数。例如 (1, 2, 4, 8) 表示在四个级别上,通道数分别为 dim、2*dim、4*dim、8*dim。
- channels:输入图像的通道数,默认为 3(RGB 图像)。
- with_time_emb:是否使用时间嵌入(time embedding),用于将时间步长信息编码到网络中。
- convnext_mult:ConvNeXT 块中的扩展倍数,默认为 2。
2. 初始卷积层
self.channels = channelsinit_dim = default(init_dim, dim // 3 * 2)
self.init_conv = nn.Conv2d(channels, init_dim, 7, padding=3, pad_mode="pad", has_bias=True)
- self.channels:保存输入图像的通道数。
- init_dim:计算初始卷积层的输出通道数。如果 init_dim 未指定,则默认为 dim // 3 * 2。
- self.init_conv:定义一个卷积层,将输入图像的通道数从 channels 转换为 init_dim。卷积核大小为 7×7,填充为 3,以保持图像的空间尺寸。
3. 时间嵌入模块
if with_time_emb:
time_dim = dim * 4
self.time_mlp = nn.SequentialCell(
SinusoidalPositionEmbeddings(dim),
nn.Dense(dim, time_dim),
nn.GELU(),
nn.Dense(time_dim, time_dim),)
else:
time_dim = None
self.time_mlp = None
- with_time_emb:如果为 True,则启用时间嵌入模块。
- time_dim:时间嵌入的维度,设置为 dim * 4。
- self.time_mlp:定义一个时间嵌入模块,包含以下部分:
- SinusoidalPositionEmbeddings(dim):使用正弦位置嵌入将时间步长编码为高维向量。
- nn.Dense(dim, time_dim):将嵌入向量的维度从 dim 扩展到 time_dim。
- nn.GELU():应用 GELU 激活函数。
- nn.Dense(time_dim, time_dim):再次将维度扩展到 time_dim。
- 如果 with_time_emb 为 False,则时间嵌入模块为空。
4. 下采样模块
self.downs = nn.CellList([])
self.ups = nn.CellList([])
num_resolutions = len(in_out)for ind, (dim_in, dim_out) in enumerate(in_out):
is_last = ind >= (num_resolutions - 1) self.downs.append(
nn.CellList([
block_klass(dim_in, dim_out, time_emb_dim=time_dim),
block_klass(dim_out, dim_out, time_emb_dim=time_dim),
Residual(PreNorm(dim_out, LinearAttention(dim_out))),
Downsample(dim_out) if not is_last else nn.Identity(),]))
- self.downs:一个 CellList,用于存储所有下采样模块。
- in_out:一个列表,包含每个分辨率级别上的输入和输出通道数。
- 循环:对每个分辨率级别,构建一个下采样模块,包含以下部分:
- 两个 ConvNeXT 块:用于特征提取,每个块的输入通道数为 dim_in,输出通道数为 dim_out。
- 一个 LinearAttention 块:用于注意力机制,提升特征的表达能力。
- 一个下采样操作:如果当前级别不是最后一个级别,则使用 Downsample 操作进行下采样;否则,使用 nn.Identity(即不进行下采样)。
5. 中间模块
mid_dim = dims[-1]
self.mid_block1 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)
self.mid_attn = Residual(PreNorm(mid_dim, Attention(mid_dim)))
self.mid_block2 = block_klass(mid_dim, mid_dim, time_emb_dim=time_dim)
- mid_dim:中间模块的通道数,等于最后一个下采样模块的输出通道数。
- self.mid_block1 和 self.mid_block2:两个 ConvNeXT 块,用于进一步提取特征。
- self.mid_attn:一个注意力模块,用于增强特征的表达能力。
6. 上采样模块
for ind, (dim_in, dim_out) in enumerate(reversed(in_out[1:])):
is_last = ind >= (num_resolutions - 1) self.ups.append(
nn.CellList([
block_klass(dim_out * 2, dim_in, time_emb_dim=time_dim),
block_klass(dim_in, dim_in, time_emb_dim=time_dim),
Residual(PreNorm(dim_in, LinearAttention(dim_in))),
Upsample(dim_in) if not is_last else nn.Identity(),]))
- self.ups:一个 CellList,用于存储所有上采样模块。
- reversed(in_out[1:]):从倒数第二个级别开始,逆序遍历分辨率级别。
- 循环:对每个分辨率级别,构建一个上采样模块,包含以下部分:
- 两个 ConvNeXT 块:用于特征提取,第一个块的输入通道数为 dim_out * 2(因为会拼接来自下采样模块的特征),输出通道数为 dim_in。
- 一个 LinearAttention 块:用于注意力机制。
- 一个上采样操作:如果当前级别不是最后一个级别,则使用 Upsample 操作进行上采样;否则,使用 nn.Identity。
7. 最终卷积层
out_dim = default(out_dim, channels)
self.final_conv = nn.SequentialCell(
block_klass(dim, dim), nn.Conv2d(dim, out_dim, 1)
)
- out_dim:最终输出的通道数,默认为输入图像的通道数。
- self.final_conv:定义一个最终卷积层,包含以下部分:
- 一个 ConvNeXT 块:用于最后的特征提取。
- 一个卷积层:将通道数从 dim 转换为 out_dim,卷积核大小为 1×1。
8. 前向传播
def construct(self, x, time):
x = self.init_conv(x) t = self.time_mlp(time) if exists(self.time_mlp) else None h = []for block1, block2, attn, downsample in self.downs:
x = block1(x, t)
x = block2(x, t)
x = attn(x)
h.append(x) x = downsample(x) x = self.mid_block1(x, t)
x = self.mid_attn(x)
x = self.mid_block2(x, t) len_h = len(h) - 1for block1, block2, attn, upsample in self.ups:
x = ops.concat((x, h[len_h]), 1)
len_h -= 1
x = block1(x, t)
x = block2(x, t)
x = attn(x) x = upsample(x)return self.final_conv(x)
- 输入:
- x:输入图像。
- time:时间步长信息。
- 前向传播过程:
- 初始卷积:通过 self.init_conv 将输入图像的通道数从 channels 转换为 init_dim。
- 时间嵌入:如果启用时间嵌入模块,则将时间步长信息通过 self.time_mlp 转换为高维向量。
- 下采样:依次通过每个下采样模块,提取特征并逐步降低图像的空间分辨率。将每个下采样模块的输出特征保存到列表 h 中。
- 中间模块:通过中间模块的两个 ConvNeXT 块和注意力模块,进一步提取特征。
- 上采样:逆序通过每个上采样模块,逐步恢复图像的空间分辨率。在每个上采样模块中,将当前特征与之前保存的特征进行拼接,然后通过两个 ConvNeXT 块和注意力模块进行特征提取。
- 最终卷积:通过最终卷积层,将通道数从 dim 转换为 out_dim,得到最终的输出。
9. 关键点总结
- U-Net 结构:网络采用 U-Net 结构,包含下采样模块、中间模块和上采样模块。下采样模块逐步降低图像分辨率,提取高层特征;上采样模块逐步恢复图像分辨率,生成最终输出。
- 时间嵌入:通过正弦位置嵌入将时间步长信息编码到网络中,使网络能够根据不同的时间步长进行去噪。
- 注意力机制:在下采样和上采样模块中引入注意力机制,增强特征的表达能力。
- 特征拼接:在上采样过程中,将当前特征与之前保存的特征进行拼接,保留更多的细节信息,有助于生成更高质量的图像。
这个 U-Net 网络是扩散模型中的核心部分,通过学习逆向去噪过程,能够从纯噪声逐步生成实际图像。
四、代码实现与运行
- 数据准备:使用Fashion-MNIST数据集进行训练。通过mindspore.dataset模块加载数据集,并进行预处理,包括随机水平翻转、标准化等操作,将图像值缩放到[−1,1]范围内。
- 模型构建:根据教程提供的代码,构建扩散模型的各个模块,包括位置嵌入模块、ResNet/ConvNeXT块、Attention模块、组归一化模块以及条件U-Net网络。特别注意U-Net网络的结构和参数配置,确保其能够正确接收输入并输出预测噪声。
- 正向扩散过程实现:定义正向扩散过程的函数q_sample,根据时间步长和噪声计划,将噪声添加到输入图像中。通过可视化不同时间步长下的噪声图像,观察噪声逐渐增加的过程。
- 训练过程:
- 定义损失函数p_losses,计算真实噪声和预测噪声之间的均方误差,并结合权重进行优化。
- 使用Adam优化器进行训练,设置动态学习率(如余弦衰减学习率)。在训练过程中,随机采样时间步长和噪声水平,优化神经网络的参数。
- 训练过程中,定期打印损失值,观察模型的收敛情况。同时,可以使用采样函数sample在训练过程中生成图像样本,观察模型生成能力的变化。
import timeepochs = 10iterator = dataset.create_tuple_iterator(num_epochs=epochs)
for epoch in range(epochs):
begin_time = time.time()for step, batch in enumerate(iterator):
unet_model.set_train()
batch_size = batch[0].shape[0]
t = randint(0, timesteps, (batch_size,), dtype=ms.int32)
noise = randn_like(batch[0])
loss = train_step(batch[0], t, noise)if step % 500 == 0:print(" epoch: ", epoch, " step: ", step, " Loss: ", loss)
end_time = time.time()
times = end_time - begin_timeprint("training time:", times, "s")# 展示随机采样效果
unet_model.set_train(False)
samples = sample(unet_model, image_size=image_size, batch_size=64, channels=channels)
plt.imshow(samples[-1][5].reshape(image_size, image_size, channels), cmap="gray")
print("Training Success!")
代码来源:Diffusion扩散模型 — MindSpore master documentation
一共训练了10轮


- 采样与生成:训练完成后,使用采样函数sample从模型中生成图像。通过逐步去噪,从纯噪声生成最终的图像样本。可以展示生成的图像样本,观察模型的生成效果。

生成的效果有些欠佳,可能是随机采样的原因,也可能是模型一些过拟合,需要进一步调整参数
五、遇到的问题及解决方法
- 环境配置问题:在ModelArts环境中安装MindSpore和依赖库时,可能会遇到版本兼容性问题。解决方法是仔细检查MindSpore和依赖库的版本要求,确保安装的版本相互兼容。可以通过查阅官方文档或社区论坛获取帮助。
- 训练时间过长:由于扩散模型需要多次正向传递来生成图像,训练过程可能相对较长。解决方法是合理配置计算资源,选择合适的GPU资源加速训练。同时,可以尝试减少训练数据集的大小或调整训练参数(如学习率、批次大小等),以缩短训练时间。
- 生成效果不佳:在训练过程中,可能会发现生成的图像样本质量不高或存在噪声。解决方法是仔细检查模型的结构和训练参数,确保模型能够正确学习逆向去噪过程。可以尝试调整网络结构、增加训练数据量、优化损失函数等方法来提高生成效果。
六、总结与展望
通过在华为云ModelArts上运行MindSpore扩散模型教程,我对扩散模型的原理和实现有了更深入的理解。扩散模型通过正向扩散和逆向去噪过程,能够生成具有一定质量的图像样本。在实践中,我掌握了MindSpore框架的基本使用方法,以及如何构建和训练扩散模型。同时,我也意识到扩散模型在生成效果和训练效率方面还存在一些挑战,如生成图像的多样性不足、训练时间较长等。
未来,我计划进一步探索扩散模型的改进方法,如引入更复杂的网络结构、优化训练策略等,以提高生成图像的质量和多样性。此外,我还想尝试将扩散模型应用于其他领域,如音频生成、视频生成等,探索其在不同领域的应用潜力。同时,我也会关注扩散模型的最新研究进展,学习和借鉴新的技术和方法,不断提升自己的技术水平。
相关文章:
学习笔记:在华为云ModelArts上运行MindSpore扩散模型教程
目录 一、背景与目的 二、环境搭建 三、模型原理学习 1. 类定义与初始化 2. 初始卷积层 3. 时间嵌入模块 4. 下采样模块 5. 中间模块 6. 上采样模块 7. 最终卷积层 8. 前向传播 9. 关键点总结 四、代码实现与运行 五、遇到的问题及解决方法 六、总结与展望 教程来源:…...

使用sharding-jdbc实现读写分离
简介 读写分离是一种数据库架构设计的模式,主要用于提高数据库的性能和可扩展性。它将数据库的读取操作和写入操作分离到不同的数据库实例上,从而优化系统的负载和响应速度。 实现前提是需要进行主从复制(数据层面的分离) 实现…...

“图像识别分割算法:解锁视觉智能的关键技术
嘿,各位朋友!今天咱们来聊聊图像识别分割算法。这可是计算机视觉领域里特别厉害的一项技术,简单来说,它能让机器“看懂”图像中的不同部分,并把它们精准地分出来。想象一下,机器不仅能识别出图里有猫还是狗…...

【Go语言快速上手】第二部分:Go语言进阶
文章目录 并发编程goroutine:创建和调度 goroutinechannel:无缓冲 channel、有缓冲 channel、select 语句无缓冲 channel有缓冲 channelselect 语句 sync 包:Mutex、RWMutex、WaitGroup 等同步原语Mutex:互斥锁RWMutex:…...
GRN前沿:GRETA:从多模式单细胞数据推断基因调控网络方法的比较与评价
1.论文原名:Comparison and evaluation of methods to infer gene regulatory networks frommultimodal single-cell data 2.发表日期:20254.12.21 摘要: 细胞通过基因表达调节其功能,由转录因子和其他调节机制的复杂相互作用驱…...

python基础入门:4.4模块与包管理
Python模块与包管理完全指南:构建可维护的代码结构 # 示例项目结构 """ my_package/ ├── __init__.py ├── core/ │ ├── __init__.py │ ├── utils.py │ └── calculator.py ├── data/ │ └── config.json └── tes…...

《XSS跨站脚本攻击》
一、XSS简介 XSS全称(Cross Site Scripting)跨站脚本攻击,为了避免和CSS层叠样式表名称冲突,所以改为了XSS,是最常见的Web应用程序安全漏洞之一,位于OWASP top 10 2013/2017年度分别为第三名和第七名&…...
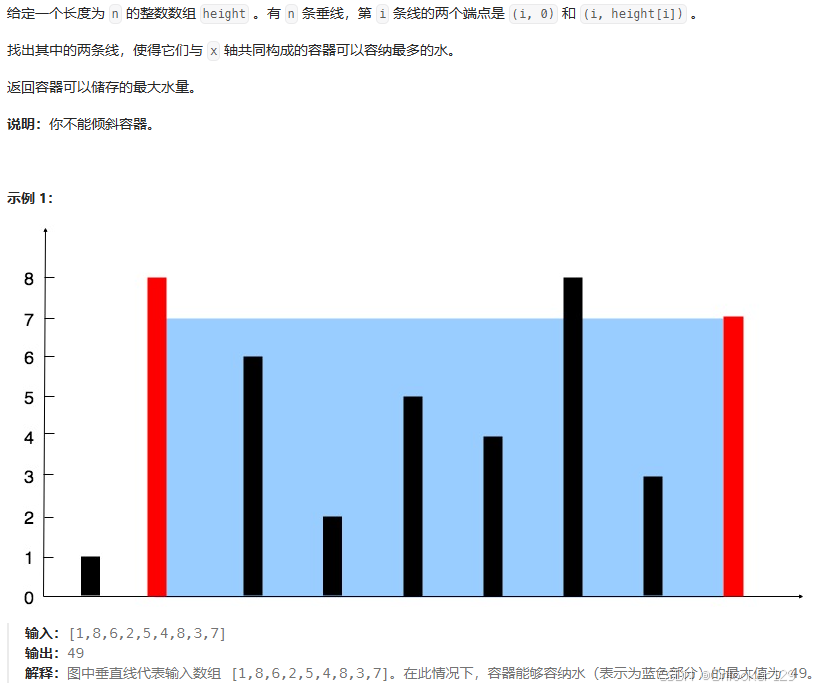
LC-两数之和、字母异位词分组、最长连续序列、移动零、盛最多水的容器
两数之和 class Solution {public int[] twoSum(int[] nums, int target) {int n nums.length; // 获取数组 nums 的长度// 外层循环:遍历数组中的每一个元素 nums[i]for(int i 0; i < n; i) {// 内层循环:从 nums[i] 的下一个元素 nums[j] 开始遍…...
Netty源码解析之线程池的实现(二):创建线程与执行任务
前言 先看下面的代码: public class MyTest {public static void main(String[] args) {//创建NioEventLoopGroupNioEventLoopGroup loopGroup new NioEventLoopGroup(3);System.out.println(Thread.currentThread()"准备执行任务");//执行任务for (in…...

IDEA - 一个启动类多次启动方法
More Run/Debug -> Modify Run Configuration -> modify options -> Allow mutiple instances...

U3D支持webgpu阅读
https://docs.unity3d.com/6000.1/Documentation/Manual/WebGPU-features.html 这里看到已经该有的差不多都有了 WOW VFX更是好东西 https://unity.com/cn/features/visual-effect-graph 这玩意儿化简了纯手搓一个特效的流程 如果按原理说就是compute shader刷position&#…...

C++广度优先搜索
简介 老规矩,先来介绍一下什么是广度优先搜索(至于这么长时间没更新是为什么,我放在文章结尾了,感兴趣可以看看,以后也是如此) 广度优先搜索,从名字就能听出来,他和深度优先搜索关…...

SVN 提交与原有文件类型不一样的文件时的操作
SVN 提交与原有文件类型不一样的文件时的操作 背景 SVN 服务器上原本的文件是软链接类型的,但是我将它改成普通文件再上传。出现了以下提示: 解决过程 本来想着通过 svn rm 和 svn add 来解决,但是行不通。 最终解决方案 svn rm --keep-…...
活动预告 | Power Hour: Copilot 引领商业应用的未来
课程介绍 智能化时代,商业应用如何实现突破?微软全球副总裁 Charles Lamanna 将为您深度解析,剖析其中关键因素。 在本次线上研讨会中,Charles Lamanna 将分享他在增强商业运营方面的独到见解与实战策略,深度解读商业…...
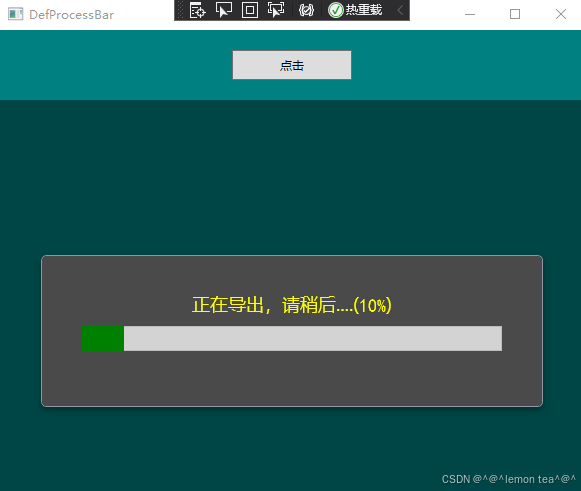
WPF 进度条(ProgressBar)示例一
本文讲述:WPF 进度条(ProgressBar)简单的样式修改和使用。 进度显示界面:使用UserControl把ProgressBar和进度值以及要显示的内容全部组装在UserControl界面中,方便其他界面直接进行使用。 <UserControl x:Class"DefProcessBarDemo…...

【C#】任务调度的实现原理与组件应用Quartz.Net
Quartz 是一个流行的开源作业调度库,最初由 Terracotta 开发,现在由 Terracotta 的一部分 Oracle 所有。它主要用于在 Java 应用程序中调度作业的执行。Quartz 使用了一种复杂的底层算法来管理任务调度,其中包括任务触发、执行、持久化以及集…...

UV - Python 包管理
文章目录 创建 uv 项目已有项目已有uv项目 创建 uv 项目 # 创建项目 uv init m3 # 创建环境 cd m3 uv venv --python 3.11 # 激活环境 source .venv/bin/activate # 添加库 uv add flask 如果创建项目后,给库取别的名字,add 的时候,会…...

pytorch torch.linalg模块介绍
torch.linalg 是 PyTorch 的 线性代数 (Linear Algebra) 子模块,它提供了许多 高效的矩阵操作和分解方法,类似于 NumPy 的 numpy.linalg 或 SciPy 的 scipy.linalg,但针对 GPU 加速和自动微分 进行了优化。 1. 矩阵基本运算 矩阵乘法 torc…...

光伏-报告显示,假期内,硅料端签单顺序发货相对稳定。若3月份下游存提产,则不排除硅料价格有上调预期。
据TrendForce集邦咨询报告显示,假期内,硅料端按照前期签单顺序发货,相对稳定。若3月份下游存提产,则不排除硅料价格有上调预期。 002306中科云网 旅游 | 公司为提供复合菜系特色餐饮的连锁企业,形成了以粤菜ÿ…...

【web自动化】指定chromedriver以及chrome路径
selenium自动化,指定chromedriver,以及chrome路径 对应这篇文章,可以点击查看,详情 from selenium import webdriverdef get_driver():# 获取配置对象option webdriver.ChromeOptions()option.add_experimental_option("de…...

利用DiSEqC协议与AVR单片机驱动卫星天线电机改造户外设备
1. 项目概述:用卫星天线电机驱动一切如果你手头有一些需要承受风吹日晒、还得精确转动的设备,比如一个户外的大型定向天线,或者一个需要定期调整角度的太阳能板支架,甚至是一个坚固的监控云台,你可能会为驱动机构发愁。…...

3步解锁专业级MMD创作:Blender插件如何重塑二次元动画工作流
3步解锁专业级MMD创作:Blender插件如何重塑二次元动画工作流 【免费下载链接】blender_mmd_tools MMD Tools is a blender addon for importing/exporting Models and Motions of MikuMikuDance. 项目地址: https://gitcode.com/gh_mirrors/bl/blender_mmd_tools …...

HDI 高密度互连板阶数的深度理解
一、概述高密度互连板(High Density Interconnector, HDI)是通过激光微孔技术和逐层积层工艺实现高密度布线的印制电路板。其阶数划分是行业内统一的技术标准,核心依据为独立积层压合次数与配套激光盲孔制程次数,而非单面层数或钻…...

随机森林算法在儿童出行方式预测中的实战应用与优化
1. 项目概述:用随机森林预测孩子怎么上学做城市交通规划或者做家长接送方案的时候,你肯定想过一个问题:孩子们到底是怎么上学的?是走路、骑车、坐公交还是家长开车送?这个问题看似简单,背后却牵扯到城市规划…...

Performance-Fish:让你的《环世界》后期游戏帧率提升400%的终极优化方案
Performance-Fish:让你的《环世界》后期游戏帧率提升400%的终极优化方案 【免费下载链接】Performance-Fish Performance Mod for RimWorld 项目地址: https://gitcode.com/gh_mirrors/pe/Performance-Fish 你是否曾在《环世界》游戏后期,面对庞大…...

ComfyUI-Manager完整指南:如何轻松管理你的AI工作流扩展库
ComfyUI-Manager完整指南:如何轻松管理你的AI工作流扩展库 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable various c…...

如何用WaveTools终极优化《鸣潮》游戏性能:从卡顿到丝滑的完整指南
如何用WaveTools终极优化《鸣潮》游戏性能:从卡顿到丝滑的完整指南 【免费下载链接】WaveTools 🧰鸣潮工具箱 项目地址: https://gitcode.com/gh_mirrors/wa/WaveTools 如果你正在玩《鸣潮》却频繁遭遇帧率波动、画面卡顿或操作延迟,那…...

BiliBiliCCSubtitle终极指南:5个实战技巧高效下载B站字幕
BiliBiliCCSubtitle终极指南:5个实战技巧高效下载B站字幕 【免费下载链接】BiliBiliCCSubtitle 一个用于下载B站(哔哩哔哩)CC字幕及转换的工具; 项目地址: https://gitcode.com/gh_mirrors/bi/BiliBiliCCSubtitle 还在为无法保存B站视频字幕而烦恼࿱…...

Burp抓包失败的五大隐形墙与HTTPS解密断裂点排查指南
1. 这不是Burp用得不对,是环境链路断在了你没看见的地方“Burp抓不到包”——这句话我过去三年里听开发、测试、刚转安全的新人说了不下两百遍。但真正打开Burp一看,Proxy标签页里空空如也,连个localhost:8080的请求都没有,十有八…...

3大突破性功能:用HiveWE革新你的魔兽争霸III地图创作体验
3大突破性功能:用HiveWE革新你的魔兽争霸III地图创作体验 【免费下载链接】HiveWE A Warcraft III world editor. 项目地址: https://gitcode.com/gh_mirrors/hi/HiveWE 还在为传统魔兽争霸III编辑器缓慢的加载速度和复杂的操作界面而烦恼吗?Hive…...