基于STM32的智能鱼缸水质净化系统设计
🤞🤞大家好,这里是5132单片机毕设设计项目分享,今天给大家分享的是智能鱼缸水质净化系统。
目录
1、设计要求
2、系统功能
3、演示视频和实物
4、系统设计框图
5、软件设计流程图
6、原理图
7、主程序
8、总结

1、设计要求
本毕业设计以单片机作为控制核心芯片,设计出一款具有监测鱼缸水的温度、水位、浊度和PH值等参数,并且通过WIFI模块连接云平台用来实现数据上传和下发,
2、系统功能
(1)基于STM32F103C8T6为主控制器的智能鱼缸的设计与实现。其中包括基于STM32F103C8T6单片机的最小系统的搭建,温度传感器、浑浊度传感器、水位传感器等相关器件模块的选型和原理图设计,在上述原理图的基础上搭建硬件平台并验证其功能的完善性。
(1)ESP8266-01Wifi模块。通过本模块单片机系统可以连接到机智云,手机APP就可以远程控制鱼缸的开关。
(2)水位传感器器。水位传感器用来检测鱼缸内的水位,是鱼缸的水位保持在一定的范围内,通过比较水位和水位的阈值来控制补水泵和排水泵。
(3)温度传感器,温度传感器用来检测鱼缸内的水温,使鱼缸保持恒温。
(4)PH传感器,用来检测鱼缸内的PH值。
(5)水泵继电器模块,用继电器来驱动两个水泵。
(6)时钟模块。利用时钟振荡电路产生时钟信号。单片机时钟可以提供一个固定的时钟频率,用于同步和控制各个模块的操作。通过时钟信号的控制,可以确保单片机系统中各个模块按照一定的时间序列进行操作,从而实现定时功能。
(7)OLED显示模块。OLED显示模块采用0.96寸液晶显示屏,该模块用来实时显示传感器数据及鱼缸工作状态
(8)按键模块。按键模块用来控制模式选择和控制鱼缸的开启与关闭。
(9)蜂鸣器模块。设备出现故障用来报警。
(10)舵机用来控制净水系统的开关。
3、演示视频和实物




基于STM32的鱼缸水质净化系统
4、系统设计框图

5、软件设计流程图

6、原理图

7、主程序
#include "sys.h" //有定制和购买的,可以联系VX:lwfw123456789
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "timer.h"
#include "usart3.h"
#include "gizwits_product.h"
#include "Key.h"
#include "Buzzer.h"
#include "OLED.h"
#include "AD.h"
#include "MyRTC.h"
#include "Servo.h"
#include "ds18b20.h"
/***********************************************************************************************
同学好!我们是5132单片机设计,定制单片机设计,实物和说明书均可定制,欢迎大家咨询。VX:lwfw123456789
其他项目演示视频和说明请大家移步哔哩哔哩、CSDN和公众号等。
哔哩哔哩:5132单片机设计
CSDN: 5132单片机设计
公众号: 5132单片机设计
抖音 : 5132单片机设计
小红书: 5132单片机设计
咸鱼: 5132单片机设计
************************************************************************************************/uint8_t KeyNum; //存储按键值
uint32_t bufe[10]; //存储传感器采集的数据
uint16_t AD0, AD1, AD2, AD3; //存储5路ADC值uint32_t TempYu = 25;
uint32_t ShuiWeiYu_Xia = 10;
uint32_t ShuiWeiYu_Shang = 70;
uint32_t ZhuoYu = 70;
uint32_t PHYu = 5;
short temperature; //存放温湿度
u8 state, state2 = 2, state2_1, state2_2, state3; //按键状态标志
u8 t = 0; //传感器读取时间间隔
u8 flag; //远程控制标志
u8 flag2 = 0, flag1, flag3;
uint16_t RTC_Time[] = {0, 0, 0};
uint16_t RTC_Time1[] = {7, 0, 0}; //定时时间---开
uint16_t RTC_Time2[] = {19, 0, 0}; //定时时间---关
u8 T_state, T_state1, qingping = 1, state_dingshi_yu_guan, state_dingshi_yu_kai, state_dingshi_yu_switch, state3_1;
float PH;
extern void TimeSet(void);
extern void TimeRead(void);
extern void DingShiMoShi(void);
extern void YuZhiSet(void);
extern void ChuangGan(void);void MY_Gizwits_Init(void) //机智云初始化函数
{TIM3_Int_Init(9, 7199); //1MS系统定时usart3_init(9600);//WIFI初始化memset((uint8_t *)¤tDataPoint, 0, sizeof(dataPoint_t)); //设备状态结构体初始化gizwitsInit();//环形缓冲区初始化gizwitsSetMode(2); //设置模式userInit();
}
u16 Get_Adc_Average(u8 ADC_CHx, u8 times)
{u32 temp_val = 0;u8 t;for (t = 0; t < times; t++){temp_val += AD_GetValue(ADC_CHx);//SYSTICK_DelayMs(5);}return temp_val / times;
}void shoudong()
{TimeRead();if (KeyNum == 2) //按键{delay_ms(20);if (KeyNum == 2){state2++;if (state2 > 1){state2 = 0;}}}if (state2 == 0){Servo_SetAngle(90);//外设操作}if (state2 == 1){Servo_SetAngle(0);//外设操作}if (KeyNum == 3) //按键{delay_ms(20);if (KeyNum == 3){state2_1++;if (state2_1 > 2){state2_1 = 0;}}}if (state2_1 == 1){BuShuiBen_ON();//外设操作PaiShuiBen_OFF();}if (state2_1 == 0){BuShuiBen_OFF();//外设操作PaiShuiBen_OFF();}if (state2_1 == 2){BuShuiBen_OFF();//外设操作PaiShuiBen_ON();}if (KeyNum == 4) //按键{delay_ms(20);if (KeyNum == 4){state2_2++;if (state2_2 > 1){state2_2 = 0;}}}if (state2_2 == 1){JiaRe_ON();//外设操作}if (state2_2 == 0){JiaRe_OFF();//外设操作}}
void zhidong()
{if (bufe[0] < ShuiWeiYu_Xia){BuShuiBen_ON();PaiShuiBen_OFF();}else if (bufe[0] > ShuiWeiYu_Shang){PaiShuiBen_ON();BuShuiBen_OFF();}else{ PaiShuiBen_OFF();BuShuiBen_OFF();}if (bufe[3]/10 < TempYu){JiaRe_ON();}else{JiaRe_OFF();}if ((bufe[1]/10 < PHYu) || (bufe[2] > ZhuoYu)){Buzzer_Turn();}else{Buzzer_OFF();}}int main(void)
{NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级uart_init(9600); //串口初始化为9600delay_init(); //延时函数初始化LED_Init(); //初始化与LED连接的硬件接口Buzzer_Init(); //下面为外设初始化OLED_Init();Key_Init();AD_Init();MyRTC_Init();Servo_Init(); //舵机初始化,并设置舵机初始角度while (DS18B20_Init()) //DS18B20初始化{printf("ds18b20 success!");delay_ms(200);}MY_Gizwits_Init(); //机智云初始化while (1){userHandle(); //数据上传gizwitsHandle((dataPoint_t *)¤tDataPoint); //后台处理,必须放在while里if (t % 10 == 0){AD0 = AD_GetValue(ADC_Channel_0); //水位传感器 PA0if (AD0 > 4000)AD0 = 4000;bufe[0] = (u8)(AD0 / 40);AD2 = Get_Adc_Average(ADC_Channel_2, 10);PH = (float)AD2 * (3.3 / 4096); //读取ADC通道4的值PH = -5.7541 * PH + 16.654; //输出电压范围0~3V3 因为STM32的ADC参考电压是3.3V//将ADC的原始值(adcx)转换为电压值。这里假设ADC的参考电压是3.3V,并且ADC的位数是12位(即最大值为4096)。bufe[1] = PH * 10;AD3 = AD_GetValue(ADC_Channel_3); //浊度传感器 PA3if (AD3 > 4000)AD3 = 4000;bufe[2] = (u8)(100 - (AD3 / 40));temperature = DS18B20_Get_Temp();bufe[3] = temperature;}t++;KeyNum = Key_GetNum();if (KeyNum == 1){qingping = 0;state2 = 2,delay_ms(20);if (KeyNum == 1){state++;if (state > 3){state = 0;}}}if (state == 0) //远程模式{if (qingping == 0){OLED_Clear();qingping = 1;} TimeRead();ChuangGan();OLED_ShowChinese(1, 7, 49);OLED_ShowChinese(1, 8, 50);}if (state == 2) //自动模式{OLED_ShowChinese(1, 7, 51);OLED_ShowChinese(1, 8, 52);TimeRead();zhidong();ChuangGan();}if (state == 1) //手动模式{OLED_ShowChinese(1, 7, 18);OLED_ShowChinese(1, 8, 52);ChuangGan();shoudong();}if (state == 3) //阈值设置{if (qingping == 0){OLED_Clear();qingping = 1;}YuZhiSet();}}
}void TimeSet() //设置时间
{if (KeyNum == 2) //PB10{delay_ms(20);if (KeyNum == 2){T_state++;if (T_state > 2){T_state = 0;}}}if (T_state == 0) //时间显示模式{MyRTC_ReadTime();OLED_ShowNum(1, 5, MyRTC_Time[3], 2); //时OLED_ShowString(1, 7, ":");OLED_ShowNum(1, 8, MyRTC_Time[4], 2); //分OLED_ShowString(1, 10, ":");OLED_ShowNum(1, 11, MyRTC_Time[5], 2); //秒RTC_Time[0] = MyRTC_Time[3];RTC_Time[1] = MyRTC_Time[4];RTC_Time[2] = MyRTC_Time[5];}if (T_state == 1) //修改时间{if (KeyNum == 5){delay_ms(20);if (KeyNum == 5){T_state1++;if (T_state1 > 2){T_state1 = 0;}}}if (T_state1 == 0) //修改时{if (KeyNum == 4)RTC_Time[0]++;if (KeyNum == 3)RTC_Time[0]--;if (RTC_Time[0] > 23 & RTC_Time[0] < 100)RTC_Time[0] = 0;if (RTC_Time[0] > 100)RTC_Time[0] = 23;OLED_ShowNum(1, 5, RTC_Time[0], 2); //时}if (T_state1 == 1) //修改分{if (KeyNum == 4)RTC_Time[1]++;if (KeyNum == 3)RTC_Time[1]--;if (RTC_Time[1] > 59 & RTC_Time[1] < 100)RTC_Time[1] = 0;if (RTC_Time[1] > 100)RTC_Time[1] = 59;OLED_ShowNum(1, 8, RTC_Time[1], 2); //时}if (T_state1 == 2) //修改秒{if (KeyNum == 4)RTC_Time[2]++;if (KeyNum == 3)RTC_Time[2]--;if (RTC_Time[2] > 59)RTC_Time[2] = 0;if (RTC_Time[2] > 59 & RTC_Time[2] < 100)RTC_Time[2] = 0;if (RTC_Time[2] > 100)RTC_Time[2] = 59;OLED_ShowNum(1, 11, RTC_Time[2], 2); //时}}if (T_state == 2){MyRTC_Time[3] = RTC_Time[0];MyRTC_Time[4] = RTC_Time[1];MyRTC_Time[5] = RTC_Time[2];MyRTC_SetTime();T_state = 0;}
}void TimeRead()
{MyRTC_ReadTime();OLED_ShowNum(1, 5, MyRTC_Time[3], 2); //时OLED_ShowString(1, 7, ":");OLED_ShowNum(1, 8, MyRTC_Time[4], 2); //分OLED_ShowString(1, 10, ":");OLED_ShowNum(1, 11, MyRTC_Time[5], 2); //秒
}void DingShiMoShi()
{TimeRead();//...............................定时模式..................................../if ((MyRTC_Time[3] == RTC_Time1[0]) && (MyRTC_Time[4] == RTC_Time1[1]) && (MyRTC_Time[5] == RTC_Time1[2])){//外设操作}if ((MyRTC_Time[3] == RTC_Time2[0]) && (MyRTC_Time[4] == RTC_Time2[1]) && (MyRTC_Time[5] == RTC_Time2[2])){//外设操作}//...............................修改定时时间..................................../OLED_ShowChinese(3, 1, 31);OLED_ShowString(3, 3, ":");OLED_ShowNum(3, 5, RTC_Time1[0], 2);OLED_ShowString(3, 7, ":");OLED_ShowNum(3, 8, RTC_Time1[1], 2);OLED_ShowString(3, 10, ":");OLED_ShowNum(3, 11, RTC_Time1[2], 2);OLED_ShowChinese(4, 1, 32);OLED_ShowString(4, 3, ":");OLED_ShowNum(4, 5, RTC_Time2[0], 2);OLED_ShowString(4, 7, ":");OLED_ShowNum(4, 8, RTC_Time2[1], 2);OLED_ShowString(4, 10, ":");OLED_ShowNum(4, 11, RTC_Time2[2], 2);if (KeyNum == 5){delay_ms(20);if (KeyNum == 5){state_dingshi_yu_switch++;if (state_dingshi_yu_switch > 2){state_dingshi_yu_switch = 0;}}}if (state_dingshi_yu_switch == 1) //设置阈值开的时间{if (KeyNum == 2){delay_ms(20);if (KeyNum == 2){state_dingshi_yu_kai++;if (state_dingshi_yu_kai > 2){state_dingshi_yu_kai = 0;}}}if (state_dingshi_yu_kai == 0) //时{if (KeyNum == 3) RTC_Time2[0]++;if (KeyNum == 4) RTC_Time2[0]--;}if (state_dingshi_yu_kai == 1)//分{if (KeyNum == 3) RTC_Time2[1]++;if (KeyNum == 4) RTC_Time2[1]--;}if (state_dingshi_yu_kai == 2)//秒{if (KeyNum == 3) RTC_Time2[2]++;if (KeyNum == 4) RTC_Time2[2]--;}}else{if (KeyNum == 2){delay_ms(20);if (KeyNum == 2){state_dingshi_yu_guan++;if (state_dingshi_yu_guan > 2){state_dingshi_yu_guan = 0;}}}if (state_dingshi_yu_guan == 0) //时{if (KeyNum == 3) RTC_Time1[0]++;if (KeyNum == 4) RTC_Time1[0]--;}if (state_dingshi_yu_guan == 1)//分{if (KeyNum == 3) RTC_Time1[1]++;if (KeyNum == 4) RTC_Time1[1]--;}if (state_dingshi_yu_guan == 2)//秒{if (KeyNum == 3) RTC_Time1[2]++;if (KeyNum == 4) RTC_Time1[2]--;}}if (state3_1 == 0) //时{if (KeyNum == 5) RTC_Time1[0]++;if (KeyNum == 6) RTC_Time1[0]--;}if (state3_1 == 1)//分{if (KeyNum == 5) RTC_Time1[1]++;if (KeyNum == 6) RTC_Time1[1]--;}if (state3_1 == 2)//秒{if (KeyNum == 5) RTC_Time1[2]++;if (KeyNum == 6) RTC_Time1[2]--;}
}void YuZhiSet()
{zhidong();OLED_ShowChinese(1, 3, 72); //显示“阈值设置”OLED_ShowChinese(1, 4, 73);OLED_ShowChinese(1, 5, 74);OLED_ShowChinese(1, 6, 75);OLED_ShowString(2, 1, "S_W_X:");OLED_ShowNum(2, 7, ShuiWeiYu_Xia, 2);OLED_ShowString(3, 1, "S_W_S:");OLED_ShowNum(3, 7, ShuiWeiYu_Shang, 2); OLED_ShowString(4, 10, "PH:");OLED_ShowNum(4, 13, PHYu, 2);OLED_ShowString(2, 10, "Temp:");OLED_ShowNum(2, 15, TempYu, 2);OLED_ShowString(3, 10, "Z_D:");OLED_ShowNum(3, 14, ZhuoYu, 2);if (KeyNum == 2) //自动模式下PB0按键控制阈值切换{delay_ms(20);if (KeyNum == 2){state3++;if (state3 > 4){state3 = 0;}}}if (state3 == 0){if (KeyNum == 3)ShuiWeiYu_Xia++;if (KeyNum == 4)ShuiWeiYu_Xia--;}if (state3 == 1){if (KeyNum == 3)ShuiWeiYu_Shang++;if (KeyNum == 4)ShuiWeiYu_Shang--;}if (state3 == 4){if (KeyNum == 3)PHYu++;if (KeyNum == 4)PHYu--;}if (state3 == 2){if (KeyNum == 3)TempYu ++;if (KeyNum == 4)TempYu --;}if (state3 == 3){if (KeyNum == 3)ZhuoYu ++;if (KeyNum == 4)ZhuoYu --;}
}void ChuangGan()
{OLED_ShowChinese(2, 1, 39);OLED_ShowChinese(2, 2, 40);OLED_ShowString(2, 5, ":");OLED_ShowNum(2, 6, bufe[0], 2);OLED_ShowString(2, 8, "%");OLED_ShowString(4, 8, "%");OLED_ShowString(2, 11, "PH:");OLED_ShowNum(2, 14, bufe[1] / 10, 1);OLED_ShowString(2, 15, ".");OLED_ShowNum(2, 16, bufe[1] % 10, 1);OLED_ShowChinese(3, 1, 26);OLED_ShowChinese(3, 2, 28);OLED_ShowString(3, 5, ":");if (temperature < 0){OLED_ShowString(3, 6, "-"); //显示负号temperature = -temperature; //转为正数}else OLED_ShowString(3, 6, "+"); //去掉负号OLED_ShowNum(3, 7, temperature / 10, 2);OLED_ShowString(3, 9, ".");OLED_ShowNum(3, 10, temperature % 10, 1);OLED_ShowChinese(4, 1, 78);OLED_ShowChinese(4, 2, 79);OLED_ShowString(4, 5, ":");OLED_ShowNum(4, 6, bufe[2], 2);
}
8、总结
本设计以单片机作为控制核心芯片,设计出一款具有监测鱼缸水的温度、水位、浊度和PH值等参数,并且通过WIFI模块连接云平台用来实现数据上传和下发。
相关文章:
基于STM32的智能鱼缸水质净化系统设计
🤞🤞大家好,这里是5132单片机毕设设计项目分享,今天给大家分享的是智能鱼缸水质净化系统。 目录 1、设计要求 2、系统功能 3、演示视频和实物 4、系统设计框图 5、软件设计流程图 6、原理图 7、主程序 8、总结 1、设计要求…...

JAVA安全—FastJson反序列化利用链跟踪autoType绕过
前言 FastJson这个漏洞我们之前讲过了,今天主要是对它的链条进行分析一下,明白链条的构造原理。 Java安全—log4j日志&FastJson序列化&JNDI注入_log4j漏洞-CSDN博客 漏洞版本 1.2.24及以下没有对序列化的类做校验,导致漏洞产生 1.2.25-1.2.41增加了黑名单限制,…...
)
格式化字符串漏洞(Format String Vulnerability)
格式化字符串漏洞(Format String Vulnerability)是程序中因不当处理格式化字符串参数而导致的一类安全漏洞,常被攻击者利用来读取内存数据、篡改程序执行流程,甚至执行任意代码。以下是对其原理、利用方式及防御措施的详细解析&am…...

C++--iomanip库
目录 1. 设置字段宽度:std::setw() 2. 设置浮点数精度:std::setprecision() 3. 设置填充字符:std::setfill() 4. 控制对齐方式:std::left 和 std::right,std::internal 5. 控制进制输出:std::hex、std…...

Redis 集群原理、主从复制和哨兵模式的详细讲解
引言:本文记录了博主在学习Redis的过程中的原理,了解为什么使用与怎么样使用 Redis 集群,在使用 Redis 集群时出现的主从复制和哨兵模式的相关知识。本文并不涉及Redis安装。 文章目录 一、简单介绍什么是 Redis二、为什么要使用 Redis 集群三…...

基于Java的远程视频会议系统(源码+系统+论文)
第一章 概述 1.1 本课题的研究背景 随着人们对视频和音频信息的需求愈来愈强烈,追求远距离的视音频的同步交互成为新的时尚。近些年来,依托计算机技术、通信技术和网络条件的发展,集音频、视频、图像、文字、数据为一体的多媒体信息ÿ…...

springboot 事务管理
在Spring Boot中,事务管理是通过Spring框架的事务管理模块来实现的。Spring提供了声明式事务管理和编程式事务管理两种方式。通常,我们使用声明式事务管理,因为它更简洁且易于维护。 1. 声明式事务管理 声明式事务管理是通过注解来实现的。…...

深度学习-神经机器翻译模型
以下为你介绍使用Python和深度学习框架Keras(基于TensorFlow后端)实现一个简单的神经机器翻译模型的详细步骤和代码示例,该示例主要处理英 - 法翻译任务。 1. 安装必要的库 首先,确保你已经安装了以下库: pip insta…...

.NET周刊【2月第1期 2025-02-02】
国内文章 dotnet 9 已知问题 默认开启 CET 导致进程崩溃 https://www.cnblogs.com/lindexi/p/18700406 本文记录 dotnet 9 的一个已知且当前已修问题。默认开启 CET 导致一些模块执行时触发崩溃。 dotnet 使用 ColorCode 做代码着色器 https://www.cnblogs.com/lindexi/p/…...

【合集】Java进阶——Java深入学习的笔记汇总 amp; 再论面向对象、数据结构和算法、JVM底层、多线程
前言 spring作为主流的 Java Web 开发的开源框架,是Java 世界最为成功的框架,持续不断深入认识spring框架是Java程序员不变的追求;而spring的底层其实就是Java,因此,深入学习Spring和深入学习Java是硬币的正反面&…...

GPU、CUDA 和 cuDNN 学习研究【笔记】
分享自己在入门显存优化时看过的一些关于 GPU 和 CUDA 和 cuDNN 的网络资料。 更多内容见: Ubuntu 22.04 LTS 安装 PyTorch CUDA 深度学习环境-CSDN博客CUDA 计算平台 & CUDA 兼容性【笔记】-CSDN博客 文章目录 GPUCUDACUDA Toolkit都包含什么?NVID…...

【5】阿里面试题整理
[1]. 介绍一下ZooKeeper ZooKeeper是一个开源的分布式协调服务,核心功能是通过树形数据模型(ZNode)和Watch机制,解决分布式系统的一致性问题。 它使用ZAB协议保障数据一致性,典型场景包括分布式锁、配置管理和服务注…...

计算机毕业设计hadoop+spark+hive物流预测系统 物流大数据分析平台 物流信息爬虫 物流大数据 机器学习 深度学习
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 作者简介:Java领…...

Wpf美化按钮,输入框,下拉框,dataGrid
Wpf美化按钮,输入框,下拉框,dataGrid 引用代码后 引用资源 <ControlTemplate x:Key"CustomProgressBarTemplate" TargetType"ProgressBar"><Grid><Border x:Name"PART_Track" CornerRadius&q…...

搜索插入位置:二分查找的巧妙应用
问题描述 给定一个已排序的整数数组 nums 和一个目标值 target,要求在数组中找到目标值并返回其索引。如果目标值不存在于数组中,则返回它按顺序插入的位置。必须使用时间复杂度为 O(log n) 的算法。 示例: 示例1: 输入: nums …...

Cocos2d-x 游戏开发-打包apk被默认自带了很多不必要的权限导致apk被报毒,如何在Cocos 2d-x中强制去掉不必要的权限-优雅草卓伊凡
Cocos2d-x 游戏开发-打包apk被默认自带了很多不必要的权限导致apk被报毒,如何在Cocos 2d-x中强制去掉不必要的权限-优雅草卓伊凡 实战操作 去除权限 要在 Cocos2d-x 开发的游戏中去掉 APK 自带权限,可以按照以下步骤操作: 编辑 AndroidMa…...
自动化xpath定位元素(附几款浏览器xpath插件)
在 Web 自动化测试、数据采集、前端调试中,XPath 仍然是不可或缺的技能。虽然 CSS 选择器越来越强大,但面对复杂 DOM 结构时,XPath 仍然更具灵活性。因此,掌握 XPath,不仅能提高自动化测试的稳定性,还能在爬…...
String类(6)
大家好,今天我们继续来学习一下String类的查找方法,主要是反向查找的一些方法。 ⭐️从后往前找一样的道理,如果找到了就返回对应字符的下标. 如果后面有对应的字符,则会返回第一个遇到的字符下标. ⭐️注意一下传入字符串的找法…...

动态表格html
题目: 要求: 1.表格由专业班级学号1-10号同学的信息组成,包括:学号、姓 名、性别、二级学院、班级、专业、辅导员; 2.表格的奇数行字体为黑色,底色为白色;偶数行字体为白色,底 色为黑…...
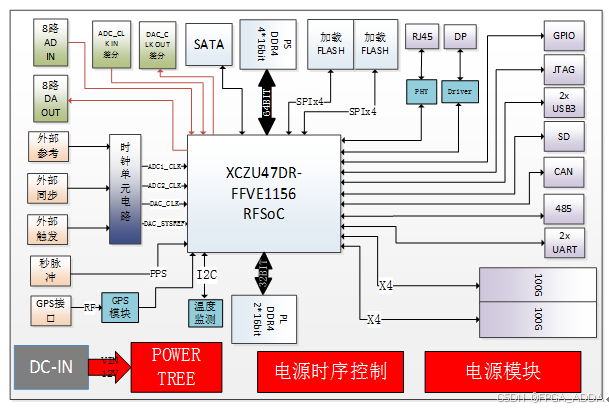
ZU47DR 100G光纤 高性能板卡
简介 2347DR是一款最大可提供8路ADC接收和8路DAC发射通道的高性能板卡。板卡选用高性价比的Xilinx的Zynq UltraScale RFSoC系列中XCZU47DR-FFVE1156作为处理芯片(管脚可以兼容XCZU48DR-FFVE1156,主要差别在有无FEC(信道纠错编解码࿰…...

Python开发者首次使用Taotoken接入大模型API的完整步骤指南
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Python开发者首次使用Taotoken接入大模型API的完整步骤指南 对于Python开发者而言,接入大模型API进行应用开发已成为一…...

Hirschmann RS20-0800M4M4SDAE工业以太网交换机
Hirschmann RS20-0800M4M4SDAE 工业以太网交换机产品特点:端口配置:共8个端口,含6个RJ45电口和2个ST光纤接口。端口速率:所有端口均为100Mbps快速以太网。光纤类型:2个光纤端口为多模、ST接头。管理类型:二…...

AI写的论文双率如何压到20%以下?这几款工具实测有效
毕业季、投稿季用AI写论文已经成为不少人的高效选择,但查重率飘红、AIGC疑似率超标两大问题,让很多人犯了难。2026年学术检测标准持续收紧,知网、维普及主流AIGC检测系统同步上线双检规则,两项指标均控制在20%以下才符合基本提交要…...

从开题到定稿零焦虑:okbiye AI 论文写作,帮你把毕业季的 “大山” 变成坦途
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 毕业季的深夜,宿舍台灯下的屏幕亮着刺眼的光,文档里的字数停留在三位数,而 deadline 正一天天逼近。你是…...

CSharpVerbalExpressions常见问题解答:解决开发者遇到的10个典型挑战
CSharpVerbalExpressions常见问题解答:解决开发者遇到的10个典型挑战 【免费下载链接】CSharpVerbalExpressions 项目地址: https://gitcode.com/gh_mirrors/cs/CSharpVerbalExpressions CSharpVerbalExpressions是一个强大的C#库,它通过类自然语…...

如何在浏览器中一键解密所有加密音乐文件:Unlock-Music完全指南
如何在浏览器中一键解密所有加密音乐文件:Unlock-Music完全指南 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地…...

ZMJS,把 JavaScript 解释器放进 SAP ABAP 应用服务器之后,很多扩展思路会变得不一样
我今天看这个 oisee/zmjs 仓库时,最吸引人的不是它把 JavaScript 语法做进了 ABAP,而是它选择了一条非常 SAP 的路线,纯 ABAP、无外部依赖、无 Kernel Module、以类和接口的形式运行在 SAP 应用服务器内部。仓库自己的定位很直接,ZMJS 是一个面向 SAP ABAP 的 Mini JavaScr…...

机器学习在犬类癌症筛查中的性能极限与挑战:基于血液数据的多癌种分析
1. 项目概述:当机器学习遇见犬类癌症筛查作为一名长期关注数据科学在生命科学领域应用的从业者,我常常被问及一个充满希望的问题:我们能否像分析人类健康数据一样,利用宠物的常规体检数据,通过机器学习提前发现癌症的蛛…...

Fiddler手机断网真相:TLS握手与证书固定的协议级拦截
1. 为什么Fiddler一开,手机就断网?这不是配置问题,是协议层的“信任危机”Fiddler抓包手机流量,本该是移动开发、测试、安全分析中最基础的操作之一。但几乎每个刚上手的人,都会在第二天早上发现:手机Wi-Fi…...

将Taotoken作为统一AI网关整合进企业现有微服务架构的实践思路
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 将Taotoken作为统一AI网关整合进企业现有微服务架构的实践思路 在构建以AI能力驱动的现代应用时,中型及以上的企业常面…...