ESP32-S3驱动步进电机以及梯形加减速库调用
一、硬件连接说明
-
电机与驱动器连接:
- 42BYGH39-401A步进电机有4根引线,分别连接到驱动器(如TB6600)的电机接口上。
- 电机引脚A+、A-、B+、B-分别连接到驱动器对应的电机接口。
- 42BYGH39-401A步进电机有4根引线,分别连接到驱动器(如TB6600)的电机接口上。
-
驱动器与ESP32-S3连接:
- ESP32-S3的GPIO引脚用于控制驱动器的脉冲(PUL)、方向(DIR)和使能(ENA)信号。
- 典型连接如下表所示:
功能 ESP32-S3 GPIO引脚 驱动器接口 PUL GPIO19 PUL+ DIR GPIO18 DIR+ ENA GPIO12 ENA+ - 驱动器的电源(VCC和GND)需要连接到合适的电源。
-
电源连接:
- 步进电机和驱动器通常需要独立的电源供电,确保电源电压和电流符合电机和驱动器的要求。
二、代码实现
以下是一个基于ESP32-S3和TB6600驱动器控制42BYGH39-401A步进电机的示例代码,用于控制步进电机的旋转方向和步数:
Arduino代码实现
// 定义控制引脚
const int pulsePin = 2; // 脉冲信号引脚
const int directionPin = 3; // 方向信号引脚
const int enablePin = 4; // 使能信号引脚// 定义电机参数
const int stepsPerRevolution = 200; // 每转脉冲数(根据电机和驱动器设置)void setup() {// 初始化引脚为输出模式pinMode(pulsePin, OUTPUT);pinMode(directionPin, OUTPUT);pinMode(enablePin, OUTPUT);// 禁用电机(使能引脚高电平)digitalWrite(enablePin, HIGH);
}void loop() {// 顺时针旋转一圈rotateMotor(stepsPerRevolution, 1);delay(1000); // 延时1秒// 逆时针旋转一圈rotateMotor(stepsPerRevolution, 0);delay(1000); // 延时1秒
}// 电机旋转函数
void rotateMotor(int steps, int direction) {// 设置方向digitalWrite(directionPin, direction);// 使能电机(使能引脚低电平)digitalWrite(enablePin, LOW);// 产生脉冲信号for (int i = 0; i < steps; i++) {digitalWrite(pulsePin, HIGH);delayMicroseconds(1000); // 脉冲宽度digitalWrite(pulsePin, LOW);delayMicroseconds(1000); // 脉冲间隔}// 禁用电机digitalWrite(enablePin, HIGH);
}
代码说明
-
引脚定义:
pulsePin:连接到驱动器的PUL+引脚,用于发送脉冲信号。directionPin:连接到驱动器的DIR+引脚,用于设置电机的旋转方向。enablePin:连接到驱动器的ENA+引脚,用于使能或禁用电机。
-
电机参数:
stepsPerRevolution:每转脉冲数,根据电机和驱动器的设置进行调整。
-
电机控制:
rotateMotor函数用于控制电机旋转:steps参数指定旋转的步数。direction参数为1时电机顺时针旋转,为0时逆时针旋转。
- 脉冲信号通过
digitalWrite函数产生,脉冲宽度和间隔可以根据电机的性能进行调整。
注意事项
- 脉冲频率:脉冲频率(即
delayMicroseconds的值)需要根据电机和驱动器的性能进行调整。过高的频率可能导致电机失步。 - 电源要求:确保驱动器和电机的电源电压和电流符合规格,避免损坏设备。
- 驱动器设置:根据TB6600驱动器的拨码开关设置细分和电流,以优化电机性能。
通过上述硬件连接和代码实现,您可以使用ESP32-S3控制步进电机。如果需要进一步优化或调整参数,可以根据实际需求进行修改。
为了实现步进电机的梯形启动和制动,可以使用Arduino的AccelStepper库或FastAccelStepper库。这些库支持加速和减速功能,能够实现梯形的速度曲线。以下是使用AccelStepper库实现梯形启动和制动的代码示例。
硬件连接
假设使用TB6600驱动器,连接方式如下:
| 功能 | Arduino引脚 | 驱动器接口 |
|---|---|---|
| PUL+ | D2 | PUL+ |
| DIR+ | D3 | DIR+ |
| ENA+ | D4 | ENA+ |
| GND | GND | GND |
| VCC | 5V | VCC |
- 电机连接:将步进电机的4根引脚(A+、A-、B+、B-)分别连接到TB6600驱动器的对应接口。
- 电源连接:驱动器的VCC和GND需要连接到合适的电源(如12V直流电源),确保电机能够正常工作。
Arduino代码实现
以下代码使用AccelStepper库实现梯形启动和制动:
#include <AccelStepper.h>// 定义控制引脚
const int pulsePin = 2; // 脉冲信号引脚
const int directionPin = 3; // 方向信号引脚
const int enablePin = 4; // 使能信号引脚// 初始化AccelStepper对象
AccelStepper stepper(1, pulsePin, directionPin);void setup() {// 初始化引脚为输出模式pinMode(enablePin, OUTPUT);// 禁用电机(使能引脚高电平)digitalWrite(enablePin, HIGH);// 设置电机参数stepper.setMaxSpeed(1000); // 最大速度(步/秒)stepper.setAcceleration(500); // 加速度(步/秒²)
}void loop() {// 使能电机digitalWrite(enablePin, LOW);// 启动电机,顺时针旋转1000步stepper.moveTo(1000);// 等待电机到达目标位置while (stepper.distanceToGo() != 0) {stepper.run();}delay(1000); // 延时1秒// 启动电机,逆时针旋转1000步stepper.moveTo(0);// 等待电机到达目标位置while (stepper.distanceToGo() != 0) {stepper.run();}delay(1000); // 延时1秒
}
代码说明
- 库初始化:
- 使用
AccelStepper库创建一个步进电机对象,指定脉冲和方向引脚。
- 使用
- 电机参数设置:
setMaxSpeed设置电机的最大速度。setAcceleration设置电机的加速度。
- 运动控制:
- 使用
moveTo函数指定目标位置,电机会自动加速到最大速度,然后减速到目标位置。 - 在
loop函数中,通过run函数不断更新电机状态,直到到达目标位置。
- 使用
注意事项
- 脉冲频率:根据电机和驱动器的性能调整最大速度和加速度参数,避免电机失步。
- 电源要求:确保驱动器和电机的电源电压和电流符合规格,避免损坏设备。
- 使能信号:在不使用电机时,通过使能引脚禁用电机,以节省电能。
通过上述代码和硬件连接,可以实现步进电机的梯形启动和制动。如果需要进一步优化或调整参数,可以根据实际需求进行修改。
下载AccelStepper库
- 访问 AccelStepper GitHub页面 。
通过上述方法,可以轻松获取并安装AccelStepper库,开始使用梯形加速和减速功能控制步进电机。
相关文章:

ESP32-S3驱动步进电机以及梯形加减速库调用
一、硬件连接说明 电机与驱动器连接: 42BYGH39-401A步进电机有4根引线,分别连接到驱动器(如TB6600)的电机接口上。 电机引脚A、A-、B、B-分别连接到驱动器对应的电机接口。 驱动器与ESP32-S3连接: ESP32-S3的GPIO引脚…...
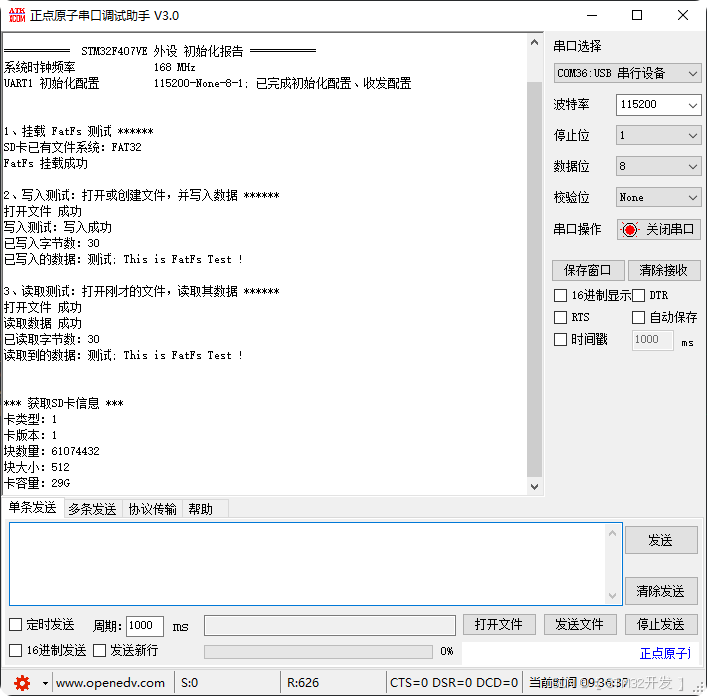
【CubeMX+STM32】SD卡 文件系统读写 FatFs+SDIO+DMA
本篇,将使用CubeMXKeil,创建一个SD卡的 FatFSSDIODMA 文件系统读写工程。 目录 一、简述 二、CubeMX 配置 FatFSSDIO DMA 三、Keil 编辑代码 四、实验效果 实现效果,如下图: 一、简述 上两篇,已循序渐进讲解了SD、…...
if、when)
Kotlin 2.1.0 入门教程(十)if、when
if 表达式 if 是一个表达式,它会返回一个值。 不存在三元运算符(condition ? then : else),因为 if 在这种场景下完全可以胜任。 var max aif (a < b) max bif (a > b) {max a } else {max b }max if (a > b) a…...
AJAX项目——数据管理平台
黑马程序员视频地址: 黑马程序员——数据管理平台 前言 功能: 1.登录和权限判断 2.查看文章内容列表(筛选,分页) 3.编辑文章(数据回显) 4.删除文章 5.发布文章(图片上传࿰…...
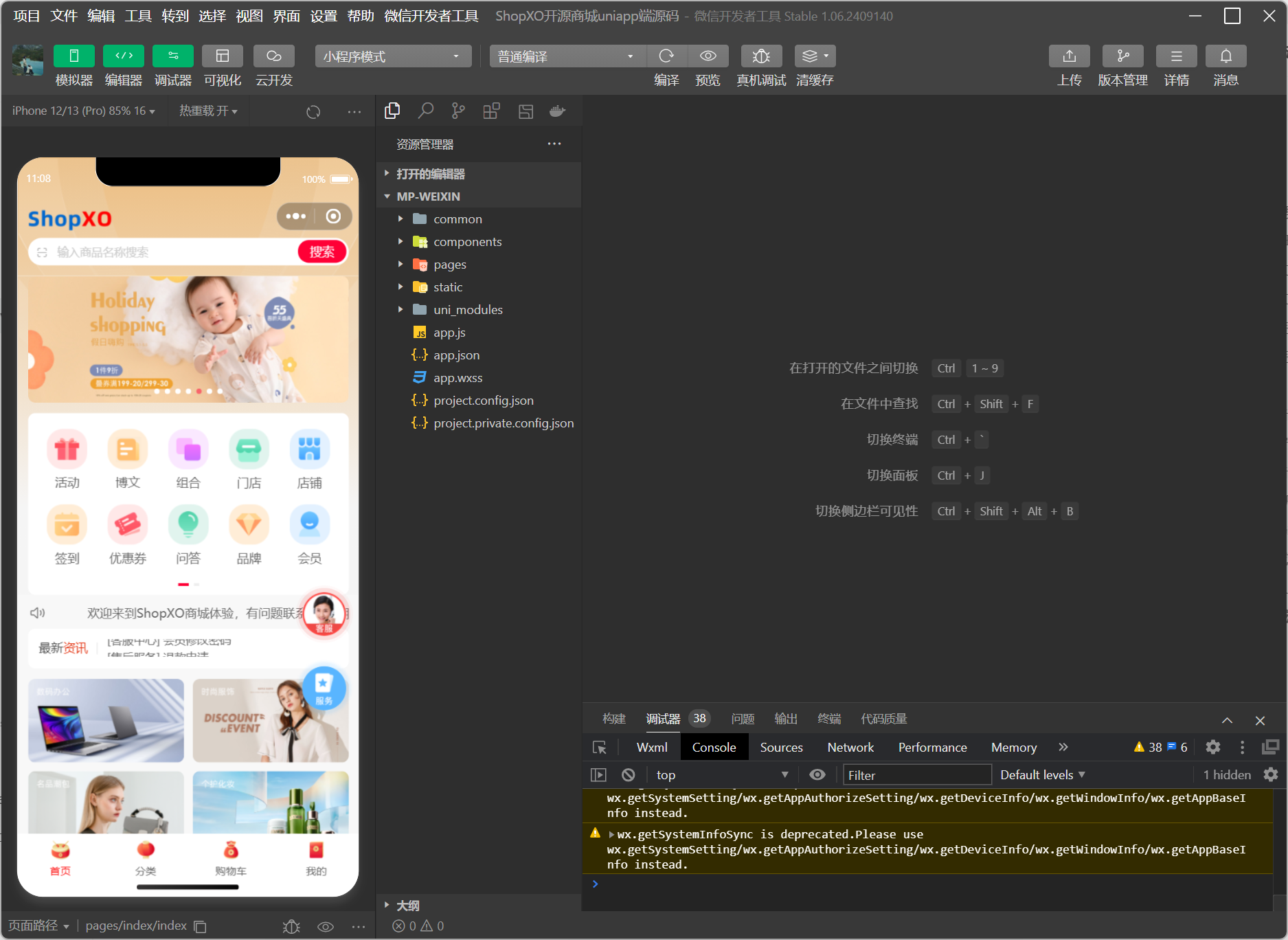
华为云搭建微信小程序商城后台
目录 安装宝塔界面 配置运行环境 1. 修改默认用户名密码 2. 修改默认端口号 3. 安装依赖软件 4. 安装商城 配置商城 1. 点击下一步进行商城环境检测 2. 将安装ShopXO成功后的弹窗信息填写到配置界面 3. 点击安装 发布小程序 源代码地址 1. 下载HBuilderX 2. 导入插…...
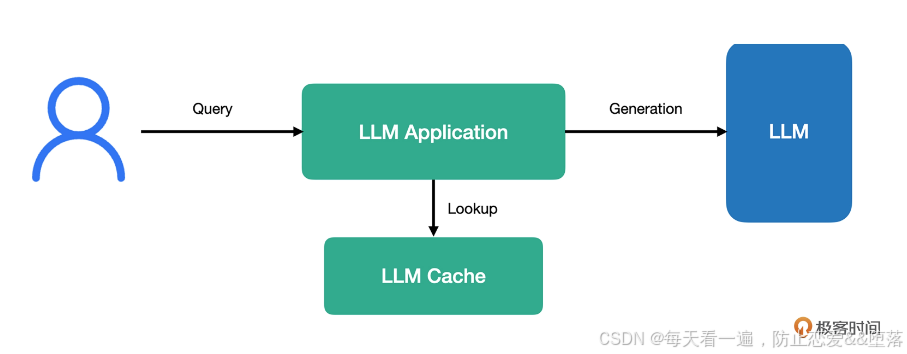
5、大模型的记忆与缓存
文章目录 本节内容介绍记忆Mem0使用 mem0 实现长期记忆 缓存LangChain 中的缓存语义缓存 本节内容介绍 本节主要介绍大模型的缓存思路,通过使用常见的缓存技术,降低大模型的回复速度,下面介绍的是使用redis和mem0,当然redis的语义…...
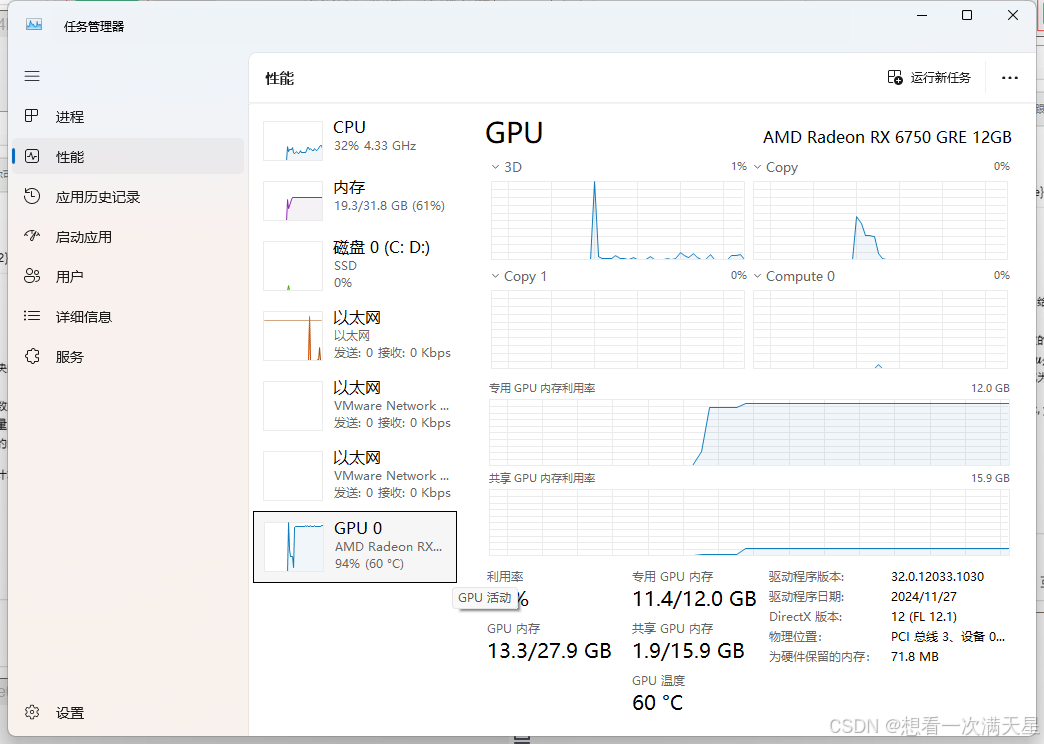
Windows下AMD显卡在本地运行大语言模型(deepseek-r1)
Windows下AMD显卡在本地运行大语言模型 本人电脑配置第一步先在官网确认自己的 AMD 显卡是否支持 ROCm下载Ollama安装程序模型下载位置更改下载 ROCmLibs先确认自己显卡的gfx型号下载解压 替换替换rocblas.dll替换library文件夹下的所有 重启Ollama下载模型运行效果 本人电脑配…...

代码随想录day09
151.反转字符串中的单词,需二刷 //先去除多余空格,再反转所有字符,再反转单词,即可反转字符串中的单词 void removeWhiteSpace(string& s){int slowIndex 0;for(int fastIndex 0; fastIndex < s.size(); fastIndex){if(…...

Racecar Gym 总结
1.Racecar Gym 简介 Racecar Gym 是一个基于 PyBullet 物理引擎 的自动驾驶仿真平台,提供 Gymnasium(OpenAI Gym) 接口,主要用于强化学习(Reinforcement Learning, RL)、多智能体竞速(Multi-Ag…...

【C++高并发服务器WebServer】-15:poll、epoll详解及实现
本文目录 一、poll二、epoll2.1 相对poll和select的优点2.2 epoll的api2.3 epoll的demo实现2.5 epoll的工作模式 一、poll poll是对select的一个改进,我们先来看看select的缺点。 我们来看看poll的实现。 struct pollfd {int fd; /* 委托内核检测的文件描述符 */s…...

Visual Studio 2022 中使用 Google Test
要在 Visual Studio 2022 中使用 Google Test (gtest),可以按照以下步骤进行: 安装 Google Test:确保你已经安装了 Google Test。如果没有安装,可以通过 Visual Studio Installer 安装。在安装程序中,找到并选择 Googl…...

Office/WPS接入DeepSeek等多个AI工具,开启办公新模式!
在现代职场中,Office办公套件已成为工作和学习的必备工具,其功能强大但复杂,熟练掌握需要系统的学习。为了简化操作,使每个人都能轻松使用各种功能,市场上涌现出各类办公插件。这些插件不仅提升了用户体验,…...

Meta AI 最近推出了一款全新的机器学习框架ParetoQ,专门用于大型语言模型的4-bit 以下量化
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领…...

操作系统—进程与线程
补充知识 PSW程序状态字寄存器PC程序计数器:存放下一条指令的地址IR指令寄存器:存放当前正在执行的指令通用寄存器:存放其他一些必要信息 进程 进程:进程是进程实体的运行过程,是系统进行资源分配和调度的一个独立单位…...

团队:前端开发工期参考 / 防止工期不足、过足、工期打架
一、前端开发工期参考 序号功能 / 模块 / 页面 / 描述pc端(数值为比例)小程序端(数值为比例)1简单页面 / 常规页面1:12复杂页面(功能复杂 / 逻辑复杂)1:1.5 / 1:2 / …...

APL语言的云计算
APL语言的云计算:一种灵活而高效的编程方式 引言 随着信息技术的迅猛发展,云计算已经成为现代计算的重要组成部分。云计算不仅带来了计算资源的高效利用,也引发了新一轮的技术革命。在这个背景下,APL(A Programming …...

idea启动报错# EXCEPTION_ACCESS_VIOLATION (0xc0000005) at pc=0x00007ffccf76e433
# EXCEPTION_ACCESS_VIOLATION (0xc0000005) at pc0x00007ffccf76e433, pid17288, tid6696 # # JRE version: (11.0.248) (build ) # Java VM: OpenJDK 64-Bit Server VM (11.0.248-LTS, mixed mode, sharing, tiered, compressed oops, g1 gc, windows-amd64) 不知道为什么…...

C++拷贝构造函数与运算符重载应该注意的一个问题?
看下面的例子: class TestClass { public:char* _pdata;size_t _nLength;public:TestClass(const TestClass& other) {_nLength other._nLength;_pdata new char[_nLength];memcpy((void*)_pdata,other._pdata, _nLength 1);}TestClass(const char* pstr) {…...

[7] 游戏机项目说明
[7] 游戏机项目说明 在这节课中,我们将学习如何基于FreeRTOS开发一个简单的游戏项目。我们会使用一个开源项目nwatch,它是一个基于STM32的开源手表,包含了三个游戏。我们的目标是将这个游戏移植到我们的开发板上,并逐步使用FreeR…...
C++17)
“深入浅出”系列之C++:(20)C++17
C17的新拓展 并行算法: C17引入了并行STL算法,允许使用多个线程并行处理元素,提高了在多核系统上的性能。 示例代码:std::sort(std::execution::par, v.begin(), v.end()); 类模板参数推导(CTAD)&#…...

Spring Cloud AWS 实战教程:构建高可用 SQS 消息队列应用 [特殊字符]
Spring Cloud AWS 实战教程:构建高可用 SQS 消息队列应用 🚀 【免费下载链接】spring-cloud-aws The New Home for Spring Cloud AWS 项目地址: https://gitcode.com/gh_mirrors/sp/spring-cloud-aws Spring Cloud AWS 是一个强大的开源框架&…...

物理引导的机器学习工作流:气候建模的融合创新与实践
1. 项目概述:当气候建模遇见机器学习如果你像我一样,在气候模拟这个领域摸爬滚打超过十年,就会深刻体会到一种“甜蜜的负担”:我们构建的地球系统模型(ESM)越来越精细,物理过程越来越复杂&#…...

SwitchyOmega+Burp无感抓包实战:解决HTTPS拦截与流量路由难题
1. 为什么“无感抓包”是BurpSuite日常使用的分水岭刚接触Web安全测试的朋友常有个错觉:装上Burp Suite,配好代理,打开浏览器,点几下网页——流量就该自动进来了。结果现实是:首页打不开、登录态丢失、HTTPS报错满屏、…...
)
告别外部中断!用EnableInterrupt库轻松搞定Arduino Nano多通道PWM读取(附完整代码)
Arduino Nano多通道PWM读取实战:用EnableInterrupt突破硬件限制当你用Arduino Nano开发四轴飞行器或机器人项目时,是否遇到过这样的尴尬:遥控器的四个通道PWM信号需要同时读取,但Nano只有两个外部中断引脚?这个问题困扰…...

森优时铁锌维发根养黑用三个月真实效果实测:内服营养养黑的客观测评
"森优时铁锌维发根养黑用三个月真实效果实测显示,针对压力、熬夜引发的早白问题,通过内服补充毛囊所需营养的方式,多数使用者能感受到发根韧性提升、新生发色素沉淀改善,整体改善效果因人而异,合规的营养补充是目…...
:执行计划教我做事)
开发转兼职DBA(二):执行计划教我做事
开发转兼职DBA(二):执行计划教我做事 查询慢了不知道为什么,加了索引还是慢,复合索引怎么建,执行计划怎么看——这些不是DBA的专利,是每个写SQL的开发者迟早要面对的事。 文章目录 开发转兼职DB…...

Airtest Poco实战:5分钟搞定微信小程序自动化测试环境搭建与元素抓取
Airtest Poco实战:5分钟搞定微信小程序自动化测试环境搭建与元素抓取微信小程序作为轻量级应用的代表,已经渗透到电商、社交、工具等各个领域。随着小程序功能的日益复杂,自动化测试成为保障产品质量的重要手段。本文将带你快速搭建微信小程序…...

3分钟解锁网易云音乐NCM文件:ncmdumpGUI小白也能懂的完整教程
3分钟解锁网易云音乐NCM文件:ncmdumpGUI小白也能懂的完整教程 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾经下载了网易云音乐的歌曲&a…...

Jupyter Notebook里跑argparse脚本总报错?一个空列表参数搞定ipykernel_launcher.py error
Jupyter Notebook中argparse报错的终极解决方案:空列表参数实战解析在数据科学和机器学习的工作流中,Jupyter Notebook因其交互式特性成为众多研究者的首选工具。然而,当我们尝试在Notebook中运行那些原本为命令行设计的Python脚本时…...

具身智能:面向新兴交叉学科建设的思考与建议 2026
这份由 CCF YOCSEF 长三角五地学术委员会 2026 年 5 月发布的白皮书,聚焦具身智能作为新兴交叉学科的建设,明确其并非 AI 与机器人学的简单拼接,而是围绕物理交互中的智能行为形成的新问题域,提出 “三大基本问题 一个应用需求”…...