Racecar Gym 总结
1.Racecar Gym 简介
Racecar Gym 是一个基于 PyBullet 物理引擎 的自动驾驶仿真平台,提供 Gymnasium(OpenAI Gym) 接口,主要用于强化学习(Reinforcement Learning, RL)、多智能体竞速(Multi-Agent Racing) 和 计算机视觉(Computer Vision) 研究。该环境具备可扩展性、高度定制化和高性能物理仿真,广泛适用于自动驾驶、路径规划、多智能体交互等领域。
2.核心功能
(1)支持多种赛车环境
Racecar Gym 提供多个预设环境,以满足不同研究需求:

示例代码:创建 Racecar Gym 环境
import gymnasium as gym
import racecar_gym
# 创建 Racecar Gym 环境
env = gym.make("RacecarGym-v0")
# 重置环境并获取初始状态
obs, info = env.reset()
# 运行智能体
for _ in range(1000):action = env.action_space.sample() # 随机采样动作obs, reward, done, truncated, info = env.step(action) # 采取动作并获取新的环境状态if done:obs, info = env.reset() # 重新初始化环境
env.close() # 关闭环境
(2)多智能体(Multi-Agent)竞速支持
Racecar Gym 允许多个智能体在同一环境中运行,支持:
• 竞争模式(Competitive Racing):多个赛车相互竞争,以最快速度完成赛道。
• 协作模式(Cooperative Driving):智能体相互配合,以优化整体行驶路径。
• 混合模式(Mixed Mode):结合竞争与协作,适用于研究智能体交互策略。
示例代码:多智能体竞速
env = gym.make("RacecarGymMultiAgent-v0", num_agents=2) # 创建包含 2 个智能体的环境
obs, info = env.reset() # 重置环境,获取初始状态
for _ in range(1000):# 每个智能体执行随机动作actions = {agent_id: env.action_space.sample() for agent_id in env.agents}obs, rewards, done, truncated, info = env.step(actions) # 执行动作if all(done.values()): # 如果所有智能体都完成任务,则重置环境obs, info = env.reset()(3)多传感器数据支持
Racecar Gym 提供**激光雷达(LiDAR)、摄像头(Camera)和惯性测量单元(IMU)**等传感器数据,增强智能体对环境的感知能力。
(a)激光雷达(LiDAR)
• 适用于避障、测距和地图构建。
• 提供 360° 环境信息,帮助智能体检测前方障碍物。
示例代码:启用 LiDAR
env = gym.make("RacecarGym-v0", use_lidar=True) # 启用 LiDAR
obs, info = env.reset()
print(obs["lidar"]) # 输出 LiDAR 读数
(b)摄像头(Camera)
• 适用于视觉导航、目标检测等任务。
• 可结合计算机视觉技术进行赛道识别。
示例代码:处理摄像头图像
import cv2
frame = obs["camera"] # 获取摄像头图像
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # 转换为灰度图
edges = cv2.Canny(gray, 50, 150) # 进行边缘检测
cv2.imshow("Edges", edges) # 显示边缘检测结果
cv2.waitKey(1) # 保持窗口
(4)强化学习训练支持
Racecar Gym 兼容主流强化学习框架(Stable-Baselines3、RLlib),支持:
• PPO(Proximal Policy Optimization) - 适用于稳定训练
• SAC(Soft Actor-Critic) - 适用于连续控制任务
• TD3(Twin Delayed DDPG) - 适用于高精度控制
• DQN(Deep Q-Network) - 适用于离散动作控制
示例代码:PPO 训练 AI 赛车
from stable_baselines3 import PPO
env = gym.make("RacecarGym-v0") # 创建 Racecar Gym 环境
model = PPO("MlpPolicy", env, verbose=1) # 初始化 PPO 强化学习模型
model.learn(total_timesteps=200000) # 训练 20 万步
# 让训练好的模型测试 AI 赛车
obs, info = env.reset()
for _ in range(1000):action, _states = model.predict(obs) # 让 AI 预测最佳动作obs, reward, done, truncated, info = env.step(action) # 执行动作if done:obs, info = env.reset()
3.可实现的项目方向
Racecar Gym 是一个基于 PyBullet 的 自动驾驶 & 竞速仿真环境,适用于:
• 自动驾驶 AI 训练
• AI 赛车
• 多智能体竞速仿真
• 路径规划 & 避障
3.1. 自动驾驶 AI 训练
项目目标
• 训练 AI 让赛车自主驾驶,优化加速、刹车、转向策略。
• 结合强化学习 + 计算机视觉 + LiDAR 进行环境感知。
• 使用 PPO、DDPG、SAC 进行训练,优化自动驾驶决策。
Step 1: 安装 Racecar Gym 及依赖
pip install racecar-gym stable-baselines3 opencv-python
安装 Racecar Gym 及 强化学习库 Stable-Baselines3,并安装 OpenCV 处理摄像头数据。
Step 2: 加载 RacecarGym 环境
import gymnasium as gym import racecar_gym
创建 RacecarGym 自动驾驶环境 env = gym.make(“RacecarGym-v0”) obs, info = env.reset() # 重置环境并获取初始状态
创建 RacecarGym 环境,用于强化学习 AI 自动驾驶训练。
Step 3: 计算机视觉感知赛道
摄像头图像进行赛道检测
import cv2
frame = obs[“camera”] # 获取摄像头画面 gray = cv2.cvtColor(frame,
cv2.COLOR_BGR2GRAY) # 转换为灰度图 edges = cv2.Canny(gray, 50, 150) # 进行边缘检测
cv2.imshow(“Edge Detection”, edges) # 显示边缘检测结果 cv2.waitKey(1) # 确保窗口持续显示
摄像头数据转换为灰度图,并进行 Canny 边缘检测,帮助 AI 识别赛道。
使用 LiDAR 传感器数据进行障碍物检测
lidar_data = obs[“lidar”] # 获取 LiDAR 数据 print(f"LiDAR Data:
{lidar_data}") # 输出 LiDAR 传感器数据
LiDAR 用于探测赛车前方障碍物,帮助 AI 做出转向或刹车决策。
Step 4: 训练 AI 自动驾驶
使用 DDPG(深度确定性策略梯度)
from stable_baselines3 import DDPG
#初始化 DDPG 模型
model = DDPG(“MlpPolicy”, env, verbose=1)
#开始训练,学习 50,000 步
model.learn(total_timesteps=50000)
DDPG 适用于连续控制任务(如赛车的油门 & 方向盘控制)。
使用 SAC(Soft Actor-Critic)
from stable_baselines3 import SAC
#初始化 SAC 模型
model = SAC(“MlpPolicy”, env, verbose=1)
#训练 100,000 步
model.learn(total_timesteps=100000)
SAC 适用于复杂环境下的 AI 决策训练,如 变道、避障等操作。
Step 5: 测试 AI 自动驾驶
obs, info = env.reset() # 重新初始化环境
for _ in range(1000): # 运行 1000 步
action, _states = model.predict(obs) # AI 预测最佳动作
obs, reward, done, truncated, info = env.step(action) # 执行动作if done: #如果赛车完成赛道,则重置obs, info = env.reset()
AI 训练后自动驾驶测试,检查是否学会正确驾驶策略。
3.2. AI 赛车
项目目标
• 优化 AI 赛车驾驶策略,提高速度 & 避免碰撞。
• 结合 强化学习 + 轨迹优化 进行训练。
Step 1: 加载 RacecarGym 进行赛车训练
import gymnasium as gym import racecar_gym
#载入赛车仿真环境
env = gym.make(“RacecarGym-v0”) obs, info = env.reset()
Step 2: 训练 AI 赛车
使用 PPO 训练 AI 赛车
from stable_baselines3 import PPO
#初始化 PPO 模型
model = PPO(“MlpPolicy”, env, verbose=1)
#训练 50,000 步
model.learn(total_timesteps=50000)
📌 PPO(Proximal Policy Optimization)适用于轨迹优化,可用于 学习最佳赛车路线。
📌 使用 DDPG 进行连续控制
from stable_baselines3 import DDPG
#初始化 DDPG 模型
model = DDPG(“MlpPolicy”, env, verbose=1)
#训练 50,000 步
model.learn(total_timesteps=50000)
📌 DDPG 适用于控制油门 & 转向角度。
Step 3: 视觉感知赛道
import cv2
frame = obs[“camera”] # 获取摄像头画面
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # 转换为灰度图
edges = cv2.Canny(gray, 50, 150) #进行边缘检测
cv2.imshow(“Edge Detection”, edges) # 显示边缘检测结果 cv2.waitKey(1)
📌 赛车 AI 需要感知赛道边界,确保不会偏离轨道。
Step 4: 测试 AI 赛车
obs, info = env.reset() for _ in range(1000):
action, _states = model.predict(obs)
obs, reward, done, truncated, info = env.step(action)if done:
obs, info = env.reset()
AI 训练后进行竞速测试,检查是否学会正确驾驶策略。
3.3. 多智能体竞速
项目目标
• 训练 多个 AI 赛车 在同一赛道竞速。
• 研究 多智能体强化学习(MARL)在赛车竞速中的应用。
Step 1: 加载多智能体竞速环境
#创建多智能体竞速环境(2 辆赛车)
env = gym.make(“RacecarGymMultiAgent-v0”, num_agents=2) obs, info = env.reset()
Step 2: 训练多智能体竞速 AI
使用 PPO 训练多智能体
from stable_baselines3 import PPO
model = PPO(“MlpPolicy”, env, verbose=1)
model.learn(total_timesteps=100000)
Step 3: 测试多智能体竞速
obs, info = env.reset() for _ in range(1000):
actions = {agent: model.predict(obs[agent]) for agent in env.agents}
obs, rewards, done, truncated, info = env.step(actions)if all(done.values()): # 所有赛车完成任务
obs, info = env.reset()
多个 AI 赛车同时训练,测试它们的竞速表现。
3.4. 自定义赛道环境
项目目标
• 创建自定义赛道,模拟 AI 需要适应的不同环境。
• 调整环境参数(如摩擦力、赛道长度、障碍物)。
• 训练 AI 适应不同赛道,提高泛化能力。
示例代码:自定义赛道
from racecar_gym.envs import make_custom_env
custom_config = {"track": "complex_track", # 选择复杂赛道"max_speed": 50.0, # 设置最大速度"use_lidar": True, # 启用 LiDAR"use_camera": True # 启用摄像头
}
env = make_custom_env(custom_config)
obs, info = env.reset()
4.结论
Racecar Gym 提供了一个高性能、可扩展的赛车仿真环境,广泛应用于:
自动驾驶 AI 研究
多智能体赛车竞速
计算机视觉与传感器感知
强化学习训练与路径优化
相关文章:
Racecar Gym 总结
1.Racecar Gym 简介 Racecar Gym 是一个基于 PyBullet 物理引擎 的自动驾驶仿真平台,提供 Gymnasium(OpenAI Gym) 接口,主要用于强化学习(Reinforcement Learning, RL)、多智能体竞速(Multi-Ag…...

【C++高并发服务器WebServer】-15:poll、epoll详解及实现
本文目录 一、poll二、epoll2.1 相对poll和select的优点2.2 epoll的api2.3 epoll的demo实现2.5 epoll的工作模式 一、poll poll是对select的一个改进,我们先来看看select的缺点。 我们来看看poll的实现。 struct pollfd {int fd; /* 委托内核检测的文件描述符 */s…...

Visual Studio 2022 中使用 Google Test
要在 Visual Studio 2022 中使用 Google Test (gtest),可以按照以下步骤进行: 安装 Google Test:确保你已经安装了 Google Test。如果没有安装,可以通过 Visual Studio Installer 安装。在安装程序中,找到并选择 Googl…...

Office/WPS接入DeepSeek等多个AI工具,开启办公新模式!
在现代职场中,Office办公套件已成为工作和学习的必备工具,其功能强大但复杂,熟练掌握需要系统的学习。为了简化操作,使每个人都能轻松使用各种功能,市场上涌现出各类办公插件。这些插件不仅提升了用户体验,…...

Meta AI 最近推出了一款全新的机器学习框架ParetoQ,专门用于大型语言模型的4-bit 以下量化
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领…...

操作系统—进程与线程
补充知识 PSW程序状态字寄存器PC程序计数器:存放下一条指令的地址IR指令寄存器:存放当前正在执行的指令通用寄存器:存放其他一些必要信息 进程 进程:进程是进程实体的运行过程,是系统进行资源分配和调度的一个独立单位…...

团队:前端开发工期参考 / 防止工期不足、过足、工期打架
一、前端开发工期参考 序号功能 / 模块 / 页面 / 描述pc端(数值为比例)小程序端(数值为比例)1简单页面 / 常规页面1:12复杂页面(功能复杂 / 逻辑复杂)1:1.5 / 1:2 / …...

APL语言的云计算
APL语言的云计算:一种灵活而高效的编程方式 引言 随着信息技术的迅猛发展,云计算已经成为现代计算的重要组成部分。云计算不仅带来了计算资源的高效利用,也引发了新一轮的技术革命。在这个背景下,APL(A Programming …...

idea启动报错# EXCEPTION_ACCESS_VIOLATION (0xc0000005) at pc=0x00007ffccf76e433
# EXCEPTION_ACCESS_VIOLATION (0xc0000005) at pc0x00007ffccf76e433, pid17288, tid6696 # # JRE version: (11.0.248) (build ) # Java VM: OpenJDK 64-Bit Server VM (11.0.248-LTS, mixed mode, sharing, tiered, compressed oops, g1 gc, windows-amd64) 不知道为什么…...

C++拷贝构造函数与运算符重载应该注意的一个问题?
看下面的例子: class TestClass { public:char* _pdata;size_t _nLength;public:TestClass(const TestClass& other) {_nLength other._nLength;_pdata new char[_nLength];memcpy((void*)_pdata,other._pdata, _nLength 1);}TestClass(const char* pstr) {…...

[7] 游戏机项目说明
[7] 游戏机项目说明 在这节课中,我们将学习如何基于FreeRTOS开发一个简单的游戏项目。我们会使用一个开源项目nwatch,它是一个基于STM32的开源手表,包含了三个游戏。我们的目标是将这个游戏移植到我们的开发板上,并逐步使用FreeR…...
C++17)
“深入浅出”系列之C++:(20)C++17
C17的新拓展 并行算法: C17引入了并行STL算法,允许使用多个线程并行处理元素,提高了在多核系统上的性能。 示例代码:std::sort(std::execution::par, v.begin(), v.end()); 类模板参数推导(CTAD)&#…...

.net一些知识点5
1.dot Net带out的参数如何使用 string name;//假设这个参数带out TestMethod(1,out name);//一定要有out 方法体中,一定要有out参数的赋值,并且能输出 2.参数的传递方式有哪些 a.值传递 b.引用传递 ref c.输出传递 out 3.设计模式知道哪些 3.us…...

(七)QT——消息事件机制&绘图&文件
目录 前言 消息事件机制 (Event System) 绘图 (Graphics & Drawing) 绘图设备 Qt 提供的主要绘图设备 Qt 主要绘图设备的特点 各个绘图设备的详细介绍 文件处理 (File Handling) 总结 前言 QT 是一个非常强大的图形用户界面(GUI)开发框架&…...

【虚幻引擎UE】AOI算法介绍与实现案例
【虚幻引擎UE】AOI算法介绍与实现 一、AOI算法介绍AOI算法的典型应用场景二、AOI相关算法1. 边界框法(Bounding Box Method)2. 动态AOI算法3. 布尔运算(Boolean Operations)4. 四叉树(Quadtree)5. R树(R-Tree)6. 圆形AOI算法7. 网格分割(Grid Partitioning)8. 多边形…...

python学opencv|读取图像(六十)先后使用cv2.erode()函数和cv2.dilate()函数实现图像处理
【1】引言 前序学习进程中,先后了解了使用cv2.erode()函数和cv2.dilate()函数实现图像腐蚀和膨胀处理的效果,相关文章链接为: python学opencv|读取图像(五十八)使用cv2.erode()函数实现图像腐蚀处理-CSDN博客 pytho…...
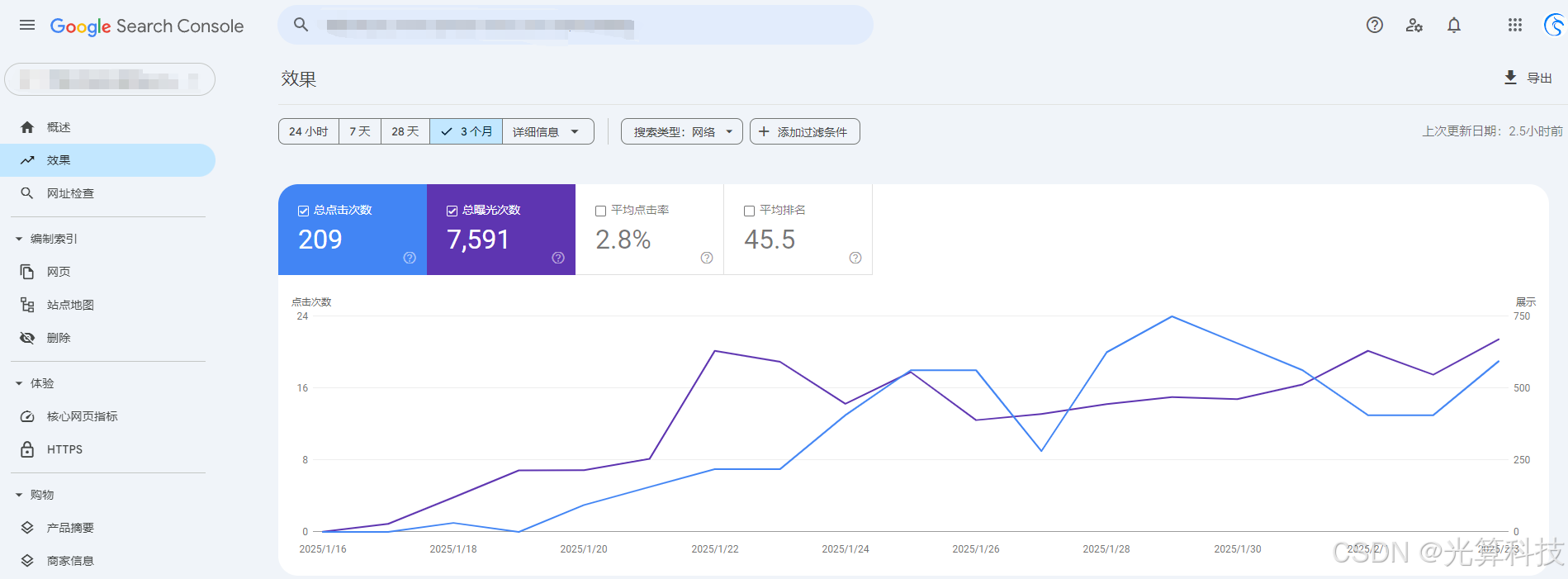
AI能帮谷歌SEO做什么?
现在没用过AI写内容的人,应该不多了,用ChatGPT写文章,用MidJourney画图,用各种工具做调研,AI已经成为SEO玩家的“标配”。但AI到底能帮SEO做到什么?省钱?省时间?还是更重要的东西&am…...

SSA-TCN麻雀算法优化时间卷积神经网络时间序列预测未来Matlab实现
SSA-TCN麻雀算法优化时间卷积神经网络时间序列预测未来Matlab实现 目录 SSA-TCN麻雀算法优化时间卷积神经网络时间序列预测未来Matlab实现预测效果基本介绍程序设计参考资料 预测效果 基本介绍 1.Matlab实现SSA-TCN麻雀算法优化时间卷积神经网络时间序列预测未来(优…...

【机器学习】数据预处理之数据归一化
数据预处理之数据归一化 一、摘要二、数据归一化概念三、数据归一化实现方法3.1 最值归一化方法3.2 均值方差归一化方法 一、摘要 本文主要讲述了数据归一化(Feature Scaling)的重要性及其方法。首先通过肿瘤大小和发现时间的例子,说明了不同…...

【专题】2024-2025人工智能代理深度剖析:GenAI 前沿、LangChain 现状及演进影响与发展趋势报告汇总PDF洞察(附原数据表)
原文链接:https://tecdat.cn/?p39630 在科技飞速发展的当下,人工智能代理正经历着深刻的变革,其能力演变已然成为重塑各行业格局的关键力量。从早期简单的规则执行,到如今复杂的自主决策与多智能体协作,人工智能代理…...

多自由度冗余空间机械臂位姿一体化规划与控制【附代码】
✨ 长期致力于空间机械臂、对偶四元数、位姿一体化、路径规划、跟踪控制研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)基于对偶四元数的冗余机械臂运…...
)
Veo 2提示词效能跃迁实战(工业级Prompt链构建全图谱)
更多请点击: https://codechina.net 第一章:Veo 2提示词编写的核心范式演进 Veo 2作为新一代视频生成模型,其提示词(prompt)工程已从早期的“关键词堆叠”转向结构化、语义分层与意图对齐的复合范式。这一演进并非简…...

Allegro等长设置翻车实录:拓扑模板法的3个坑与手工PinPair的救赎
Allegro等长设计避坑指南:从拓扑模板到精准PinPair的实战演进在高速PCB设计中,等长匹配如同精密钟表里的齿轮啮合,差之毫厘便可能导致整个系统时序崩塌。当设计从简单的点对点结构升级到多负载复杂拓扑时,Allegro用户常陷入两种典…...

64_《智能体微服务架构企业级实战教程》授权与认证之授权认证集成测试
前言 配套视频教程: 在 Bilibili课堂、CSDN课程、51CTO学堂 同步发售,提供:源码+部署脚本+文档。 bilibili课堂视频教程:智能体微服务架构企业级实战教程_哔哩哔哩_bilibili CSDN课程视频教程:智能体微服务架构企业级实战教程_在线视频教程-CSDN程序员研修院 51CTO学堂…...
到底在‘看’什么?)
从社交关系到分子结构:图解GCN(图卷积网络)到底在‘看’什么?
从社交关系到分子结构:图解GCN(图卷积网络)到底在‘看’什么?想象一下,你刚搬到一个新社区,想快速了解周围的邻居。最直接的方式是什么?不是挨家挨户敲门,而是通过社区活动认识几位关…...

Python合并Excel文档
有若干个Excel文档,每个文档格式一致,及第一行为文件标题,第二行为表格表头(表头不完全一致)。现需要将他们合并。合并规则为:去掉每个文档的第一行,以第二行为表头,将每个文档的第三…...

DragonBones与Godot集成:骨骼动画的可编程化实践
1. 为什么在Godot里用DragonBones不是“锦上添花”,而是“绕不开的刚需” 去年上线一个横版动作手游Demo时,美术团队交来一套20个角色、每个角色含8套动画(待机/跑动/跳跃/攻击/受击/死亡/闪避/必杀)的Spine资源。我兴冲冲导入God…...

基于MAX78000的医疗紧急呼叫系统:边缘AI与低功耗设计实战
1. 项目概述与核心价值大家好,我是Victor Hugo,一名电子工程师。今天我想和大家分享一个我最近完成并参与设计竞赛的项目:一个基于MAX78000 FTHR开发板的医疗紧急呼叫辅助系统。这个项目的核心,不是从零开始造一个新轮子ÿ…...

Windows Cleaner深度解析:5大核心模块彻底解决系统空间不足问题
Windows Cleaner深度解析:5大核心模块彻底解决系统空间不足问题 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner Windows Cleaner是一款完全免费开源的…...

基于USB ACA模式实现安卓手机边玩边充的游戏手柄设计
1. 项目缘起:当手机性能过剩,却败给了触摸屏几年前,我清理手机游戏时,发现一个挺无奈的现象:性能足以媲美掌机的智能手机里,只剩下一些慢节奏的平台解谜或者数独。那些曾经让我在掌机上废寝忘食的赛车、动作…...