[Computer Vision]实验六:视差估计
目录
一、实验内容
二、实验过程
2.1.1 test.py文件
2.1.2 test.py文件结果与分析
2.2.1 文件代码
2.2.2 结果与分析
一、实验内容
- 给定左右相机图片,估算图片的视差/深度;体现极线校正(例如打印前后极线对)、同名点匹配(例如打印数量、或可视化部分匹配点)、估计结果(部分像素的视差或深度)。
- 评估基线长短、不同场景(室内、室外)对算法的影响。
二、实验过程
2.1.1 test.py文件
from PIL import Image
from pylab import *
from scipy.ndimage import *
import numpy as np
import cv2
import matplotlib.pyplot as plt
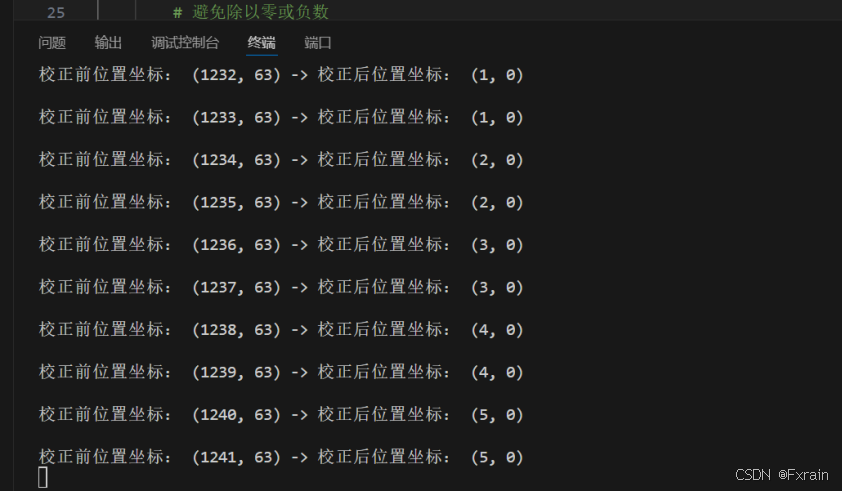
from scipy.ndimage import filtersdef plane_sweep_ncc(im_l, im_r, start, steps, wid):m, n = im_l.shapemean_l = np.zeros((m, n))mean_r = np.zeros((m, n))s = np.zeros((m, n))s_l = np.zeros((m, n))s_r = np.zeros((m, n))dmaps = np.zeros((m, n, steps))filters.uniform_filter(im_l, wid, mean_l)filters.uniform_filter(im_r, wid, mean_r)norm_l = im_l - mean_lnorm_r = im_r - mean_rfor displ in range(steps):filters.uniform_filter(np.roll(norm_l, -displ - start) * norm_r, wid, s)filters.uniform_filter(np.roll(norm_l, -displ - start) * np.roll(norm_l, -displ - start), wid, s_l)filters.uniform_filter(norm_r * norm_r, wid, s_r)with np.errstate(invalid='ignore'):denominator = np.sqrt(s_l * s_r)denominator[denominator == 0] = np.inf dmaps[:, :, displ] = s / denominatorreturn np.argmax(dmaps, axis=2)def epipolar_correction(im_l, im_r, F):h, w = im_l.shapecorrected_r = np.zeros_like(im_r)for y in range(h):for x in range(w):pt = np.array([x, y, 1])line = F @ ptline = line / line[0]a, b, c = lineu = int(round(-c / a))v = int(round(-c / b))if 0 <= u < w and 0 <= v < h:corrected_r[y, x] = im_r[v, u]print(f"\n校正前位置坐标: ({x}, {y}) -> 校正后位置坐标: ({u}, {v})")return corrected_rdef find_matches(im_l, im_r):sift = cv2.SIFT_create()kp1, des1 = sift.detectAndCompute(im_l.astype(np.uint8), None)kp2, des2 = sift.detectAndCompute(im_r.astype(np.uint8), None)bf = cv2.BFMatcher()matches = bf.knnMatch(des1, des2, k=2)good_matches = []for m, n in matches:if m.distance < 0.75 * n.distance:good_matches.append(m)return kp1, kp2, good_matchesdef compute_fundamental_matrix(kp1, kp2, matches):points1 = np.float32([kp1[m.queryIdx].pt for m in matches])points2 = np.float32([kp2[m.trainIdx].pt for m in matches])F, mask = cv2.findFundamentalMat(points1, points2, cv2.FM_RANSAC)return Fdef visualize_results(im_l, im_r, im_r_corrected, kp1, kp2, matches):fig, axs = plt.subplots(1, 3, figsize=(15, 5))axs[0].imshow(im_l, cmap='gray')axs[0].set_title('Left Image')axs[0].axis('off')axs[1].imshow(im_r, cmap='gray')axs[1].set_title('Right Image')axs[1].axis('off')axs[2].imshow(im_r_corrected, cmap='gray')axs[2].set_title('Corrected Right Image')axs[2].axis('off')plt.show()img_matches = cv2.drawMatches(im_l.astype(np.uint8), kp1, im_r.astype(np.uint8), kp2, matches[:10], None, flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS)plt.figure(figsize=(10, 5))plt.imshow(img_matches)plt.title('Top 10 Matches')plt.axis('off')plt.show()im_l = np.array(Image.open('D:\\Computer vision\\KITTI2015_part\\left\\000000_10.png').convert('L'), 'f')
im_r = np.array(Image.open('D:\\Computer vision\\KITTI2015_part\\right\\000000_10.png').convert('L'), 'f')
steps = 50
start = 4
wid = 13kp1, kp2, matches = find_matches(im_l, im_r)
F = compute_fundamental_matrix(kp1, kp2, matches)im_r_corrected = epipolar_correction(im_l, im_r, F)
visualize_results(im_l, im_r, im_r_corrected, kp1, kp2, matches)
res = plane_sweep_ncc(im_l, im_r_corrected, start, steps, wid)
imsave('D:\\Computer vision\\KITTI2015_part\\12_3test.jpg', res)2.1.2 test.py文件结果与分析
上述代码通过特征点检测、基础矩阵计算、极线校正以及视差图计算实现了立体匹配和校正的流程。
结果一:
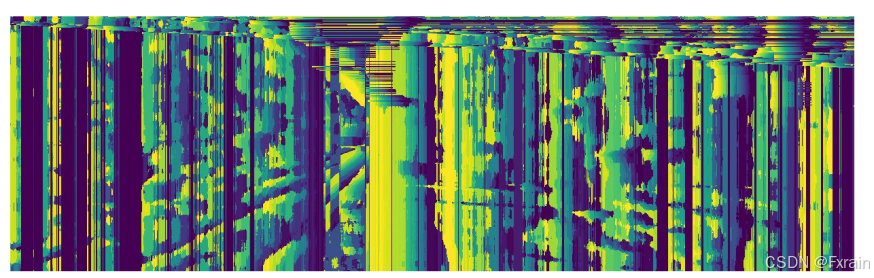
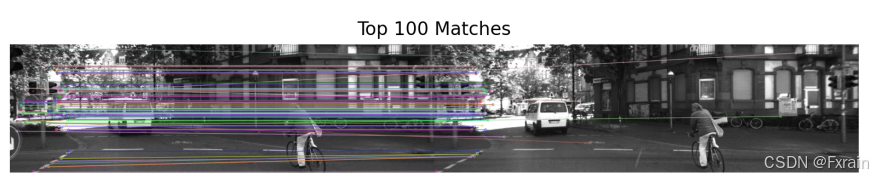
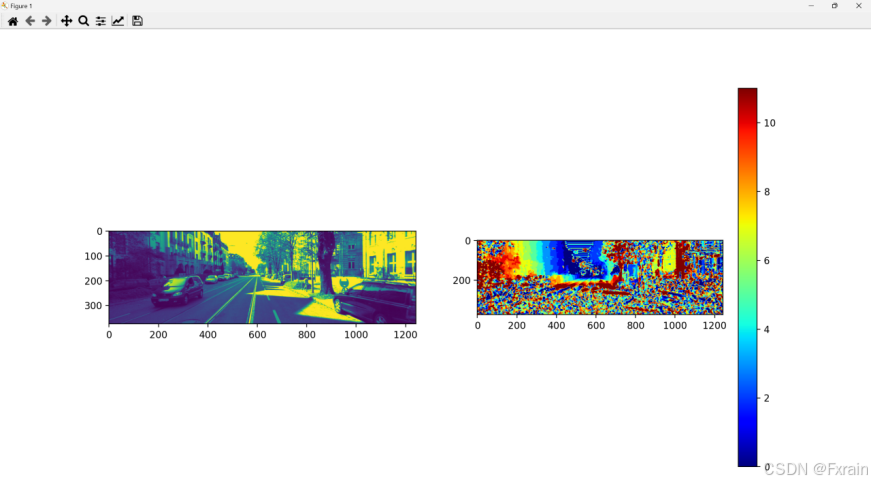
数据集如下图图1、图2所示,图3展示了极线校正前后坐标信息的部分截图,图4展示了部分同名点匹配结果,图5展示了视差估计结果。



结果二:
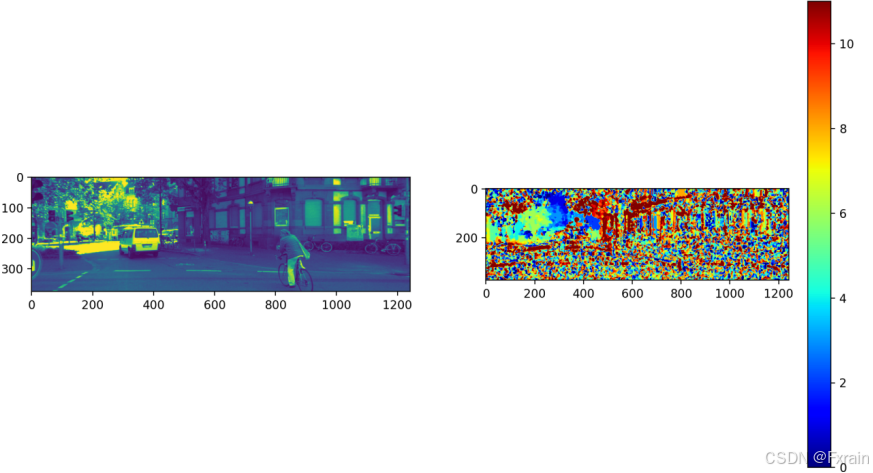
数据集如下图图6、图7所示,图8展示了极线校正前后坐标信息的部分截图,图9展示了部分同名点匹配结果,图10展示了视差估计结果。



2.2.1 文件代码
a.stereo_module.py文件
from numpy import argmax, roll, sqrt, zeros
from scipy.ndimage import filters
def plane_sweep_ncc(im_l,im_r,start,steps,wid):m,n=im_l.shapemean_l=zeros((m,n))mean_r=zeros((m,n))s=zeros((m,n))s_l=zeros((m,n))s_r=zeros((m,n))dmaps=zeros((m,n,steps))filters.uniform_filter(im_l,wid,mean_l)filters.uniform_filter(im_r,wid,mean_r)norm_l=im_l-mean_lnorm_r=im_r-mean_rfor displ in range(steps):filters.uniform_filter(roll(norm_l,-displ-start)*norm_r,wid,s)filters.uniform_filter(roll(norm_l,-displ-start)*roll(norm_l,-displ-start),wid,s_l)filters.uniform_filter(norm_r*norm_r,wid,s_r)dmaps[:,:,displ]=s/sqrt(s_l*s_r)return argmax(dmaps,axis=2)def plane_sweep_gauss(im_l,im_r,start,steps,wid):m,n = im_l.shape# arrays to hold the different sumsmean_l = zeros((m,n))mean_r = zeros((m,n))s = zeros((m,n))s_l = zeros((m,n))s_r = zeros((m,n))dmaps = zeros((m,n,steps))filters.gaussian_filter(im_l,wid,0,mean_l)filters.gaussian_filter(im_r,wid,0,mean_r)norm_l = im_l - mean_lnorm_r = im_r - mean_rfor displ in range(steps):filters.gaussian_filter(roll(norm_l,-displ-start)*norm_r,wid,0,s) filters.gaussian_filter(roll(norm_l,-displ-start)*roll(norm_l,-displ-start),wid,0,s_l)filters.gaussian_filter(norm_r*norm_r,wid,0,s_r) dmaps[:,:,displ] = s/sqrt(s_l*s_r)return argmax(dmaps,axis=2)b. stereo_test.py文件
from matplotlib import colorbar
from matplotlib.pyplot import imshow, show, subplot
from numpy import array
from PIL import Image
import stereo_module as stereo
import cv2
import matplotlib.pyplot as plt
im_l=array(Image.open('D:\\Computer vision\\KITTI2015_part\\left\\000000_10.png').convert('L'),'f')
im_r=array(Image.open('D:\Computer vision\\KITTI2015_part\\right\\000000_10.png').convert('L'),'f')
steps=12
start=4
wid=9
res_ncc=stereo.plane_sweep_ncc(im_l,im_r,start,steps,wid)
cv2.imwrite('D:\\Computer vision\\KITTI2015_part\\depth_ncc.png',res_ncc)
res_gauss=stereo.plane_sweep_gauss(im_l,im_r,start,steps,wid)
cv2.imwrite('D:\\Computer vision\\KITTI2015_part\\depth_gauss.png',res_gauss)subplot(121)
imshow(im_l)subplot(122)
imshow(res_ncc, cmap='jet')
plt.colorbar()
show()2.2.2 结果与分析
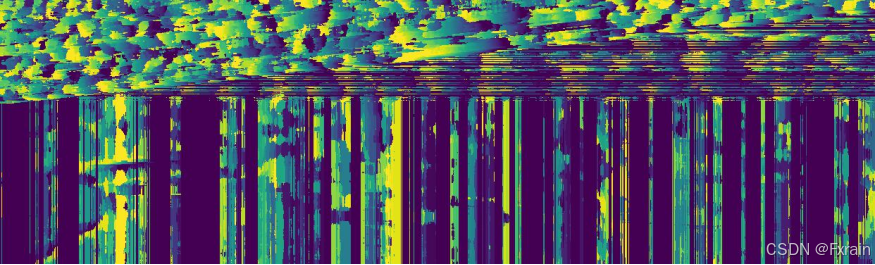
视差估计结果如图11、图12所示
相关文章:
[Computer Vision]实验六:视差估计
目录 一、实验内容 二、实验过程 2.1.1 test.py文件 2.1.2 test.py文件结果与分析 2.2.1 文件代码 2.2.2 结果与分析 一、实验内容 给定左右相机图片,估算图片的视差/深度;体现极线校正(例如打印前后极线对)、同名点匹配…...

【 开发知识点 一 】 随机数生成器 /dev/urandom 和 /dev/random
文章目录 一、随机数生成器 是什么 ?二、为什么 需要 随机数生成器 ?三、随机数生成器 基本原理四、随机数生成器 三个输出接口五、随机生成器 应用1、简单应用2、项目应用一、随机数生成器 是什么 ? /dev/random 和 /dev/urandom 是 Linux 上的字符设备文件,它们是随机数…...

LabVIEW虚拟弗兰克赫兹实验仪
随着信息技术的飞速发展,虚拟仿真技术已经成为教学和研究中不可或缺的工具。开发了一种基于LabVIEW平台开发的虚拟弗兰克赫兹实验仪,该系统不仅能模拟实验操作,还能实时绘制数据图形,极大地丰富了物理实验的教学内容和方式。 …...

LLC谐振变换器恒压恒流双竞争闭环simulink仿真
1.模型简介 本仿真模型基于MATLAB/Simulink(版本MATLAB 2017Ra)软件。建议采用matlab2017 Ra及以上版本打开。(若需要其他版本可联系代为转换)针对全桥LLC拓扑,利用Matlab软件搭建模型,分别对轻载…...

TVbox蜂蜜影视:智能电视观影新选择,简洁界面与强大功能兼具
蜂蜜影视是一款基于猫影视开源项目 CatVodTVJarLoader 开发的智能电视软件,专为追求简洁与高效观影体验的用户设计。该软件从零开始编写,界面清爽,操作流畅,特别适合在智能电视上使用。其最大的亮点在于能够自动跳过失效的播放地址…...

Python 绘制迷宫游戏,自带最优解路线
1、需要安装pygame 2、上下左右移动,空格实现物体所在位置到终点的路线,会有虚线绘制。 import pygame import random import math# 迷宫单元格类 class Cell:def __init__(self, x, y):self.x xself.y yself.walls {top: True, right: True, botto…...

vue3学习-1(基础)
vue3学习-1(基础) 1. 开始API 风格选项式 API (Options API)组合式 API (Composition API) 快速创建个应用 2.基础1. 创建个应用2.模板语法3.响应式基础reactive() 的局限性[](https://cn.vuejs.org/guide/essentials/reactivity-fundamentals.html#limi…...

deepseek使用记录18——文化基因之文化融合
文明长河中的生命浪花 在洛阳白马寺的银杏树下,年轻母亲指着"农禅并重"碑刻给孩子讲述祖辈耕作的故事;在哔哩哔哩的直播间里,00后女孩穿着汉服跳起街舞,弹幕飘过"这才是文化缝合怪"。当文明交融的宏大叙事照…...

Hadoop简介
1. Hadoop简介 官网:http://hadoop.apache.org 1.1 Hadoop架构 Hadoop由三个模块组成:分布式存储HDFS、分布式计算MapReduce、资源调度引擎YARN 1.2 Hadoop历史 Hadoop作者Doug Cutting Apache Lucene是一个文本搜索系统库 Apache Nutch作为前者的一部…...

密码学(哈希函数)
4.1 Hash函数与数据完整性 数据完整性: 检测传输消息(加密或未加密)的修改。 密码学Hash函数: 构建某些数据的简短“指纹”;如果数据被篡改,则该指纹(以高概率)不再有效。Hash函数…...

谈谈单例模式中通过Htools包的SpringUtil.getBean获取Bean的好处
目录 优势 解决依赖注入失效问题: 典型应用场景: 好处 1. 实例化时序问题 2. 延迟获取解决空指针 3. 设计模式与 Spring 的权衡 代码对比:错误 vs 正确 错误示例(空指针): 正确实现(延…...

本地部署大语言模型-DeepSeek
DeepSeek 是国内顶尖 AI 团队「深度求索」开发的多模态大模型,具备数学推理、代码生成等深度能力,堪称"AI界的六边形战士"。 Hostease AMD 9950X/96G/3.84T NVMe/1G/5IP/RTX4090 GPU服务器提供多种计费模式。 DeepSeek-R1-32B配置 配置项 规…...

adb的安装
1、概念 (1)adb(android debug bridge)安卓调试桥,用于完成电脑和手机之间的通信控制。 (2)xcode来完成对于ios设备的操控,前提是有个mac电脑。 2、adb的安装 (1&…...

Python 如何实现 Markdown 记账记录转 Excel 存储
文章精选推荐 1 JetBrains Ai assistant 编程工具让你的工作效率翻倍 2 Extra Icons:JetBrains IDE的图标增强神器 3 IDEA插件推荐-SequenceDiagram,自动生成时序图 4 BashSupport Pro 这个ides插件主要是用来干嘛的 ? 5 IDEA必装的插件&…...

随机播放音乐 伪随机
import java.util.*;/*** https://cloud.tencent.com.cn/developer/news/1045747* 伪随机播放音乐*/ public class MusicPlayer {private List<String> allSongs; // 所有歌曲列表private List<String> playedSongs; // 已经播放过的歌曲列表private Map<String…...

latex 环境配置
编译器可选 miktex和 tex live ① miktex 下载地址 Portable 版本用的也是 Installer版的安装程序 basic-miktex-24.1-x64.exe,但是需要修改文件名为 miktex-portable.exe ├──texmfs │ ├─config │ ├─data │ └─install │ └─miktex/…...

fortify安全扫描Access Control: Database问题解决
概述 Access Control: Database说白了就是权限控制。在访问数据库(sql和nosql)需要加入当前用户的权限控制。不然会被fortify扫描出来,认为客户端可能不挟持和假冒,从而导致数据被泄露。 但是这个并不是任何时候都需要的,有的接口本来…...

Java 设计模式:软件开发的精髓与艺
目录 一、设计模式的起源二、设计模式的分类1. 创建型模式2. 结构型模式3. 行为型模式三、设计模式的实践1. 单例模式2. 工厂模式3. 策略模式四、设计模式的优势五、设计模式的局限性六、总结在软件开发的浩瀚星空中,设计模式犹如一颗颗璀璨的星辰,照亮了开发者前行的道路。它…...
初学者如何用 Python 写第一个爬虫?
?? 欢迎来到我的博客! 非常高兴能在这里与您相遇。在这里,您不仅能获得有趣的技术分享,还能感受到轻松愉快的氛围。无论您是编程新手,还是资深开发者,都能在这里找到属于您的知识宝藏,学习和成长。 ?? …...

Cocos Creator3.8.6拖拽物体的几种方式
文章目录 前言一、第一种通过UILocation二、第二种通过UIDelta实现总结 前言 在游戏开发中,拖拽物体是一个非常常见的交互功能,无论是用于UI元素的拖动,还是场景中物体的移动,拖拽操作都能极大地提升用户体验。Cocos Creator 3.8…...

为什么你的学术论文需要APA第7版样式表?3分钟解决Word格式难题
为什么你的学术论文需要APA第7版样式表?3分钟解决Word格式难题 【免费下载链接】APA-7th-Edition Microsoft Word XSD for generating APA 7th edition references 项目地址: https://gitcode.com/gh_mirrors/ap/APA-7th-Edition 作为一名学术研究者或学生&a…...

华硕笔记本性能控制新选择:G-Helper轻量化控制中心完全指南
华硕笔记本性能控制新选择:G-Helper轻量化控制中心完全指南 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenboo…...

如何3分钟完成Steam游戏清单下载?Onekey工具终极指南
如何3分钟完成Steam游戏清单下载?Onekey工具终极指南 【免费下载链接】Onekey Onekey Steam Depot Manifest Downloader 项目地址: https://gitcode.com/gh_mirrors/one/Onekey 你是否曾经为了获取Steam游戏清单而花费数小时?手动查找App ID、配置…...

C++中的函数知识点大全
函数的定义不能嵌套但调用可以嵌套在函数调用时,如某一默认参数要指明一个特定值,则有其之前所有参数都必须赋值赋默认实参时 一旦某个形参被赋予了默认值,它后面的所有形参都必须有默认值,因为设置默认参数的顺序是自右向左&…...

卡梅德生物技术快报|多肽库筛选:基于全质粒 PCR 的噬菌体文库构建与小分子表位淘选实战
正文摘要本文面向生物研发、实验技术、噬菌体展示方向开发者,系统讲解多肽库筛选完整流程:从问题分析、瓶颈定位、实验方案设计到质控与结果输出,提供可复现的技术方案与关键参数。内容基于真实学位论文研究,聚焦高库容、高多样性…...

CSerialPort 4.3.2 保姆级集成指南:5分钟让你的QT/MFC/Electron项目拥有稳定串口功能
CSerialPort 4.3.2 全栈集成实战:从QT到Electron的跨平台串口方案 在工业控制、物联网设备调试和嵌入式系统开发中,串口通信作为最基础也最可靠的数据传输方式之一,至今仍发挥着不可替代的作用。然而,不同操作系统提供的串口API差…...

DLSS版本管理器:5分钟掌握游戏性能优化终极指南
DLSS版本管理器:5分钟掌握游戏性能优化终极指南 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper 你是否曾因游戏帧数不稳定而烦恼?是否想体验最新DLSS技术带来的性能提升却不知从何入手ÿ…...

5分钟免费搞定:让Windows资源管理器原生显示iPhone HEIC照片缩略图
5分钟免费搞定:让Windows资源管理器原生显示iPhone HEIC照片缩略图 【免费下载链接】windows-heic-thumbnails Enable Windows Explorer to display thumbnails for HEIC/HEIF files 项目地址: https://gitcode.com/gh_mirrors/wi/windows-heic-thumbnails 你…...

在数据分析和报告自动化场景中集成Taotoken调用大模型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在数据分析和报告自动化场景中集成Taotoken调用大模型 数据分析与报告生成是许多团队日常工作中的高频任务。传统流程中࿰…...

HarmonyOS 6 Chip 组件:设置默认后缀图标使用文档
文章目录代码默认后缀图标核心配置1. 启用默认关闭图标2. 显示优先级规则3. 关联配置项代码解析1. 启用默认后缀图标2. 不冲突条件3. 整体结构总结默认后缀图标即 Chip 内置关闭图标,由系统提供样式、尺寸、交互逻辑,无需配置图片资源,只需开…...