机器视觉运动控制一体机在天地盖同步跟随贴合解决方案

市场应用背景
纸盒天地盖是一种包装形式,广泛应用于消费电子、食品礼盒、奢侈品及化妆品等领域。其采用高强度纸板,经过预组装处理,结构坚固稳定,能有效保护产品并提升品牌形象。随着包装行业快速发展,市场对天地盖的品质和产能需求持续增长,同时客户对个性化、定制化包装的要求日益提高,而劳动力成本上升也给企业带来压力。
为此,生产商积极引入自动化解决方案,优化流程、降低成本、提升效率,满足多样化需求。自动化技术不仅加速生产,还确保产品一致性和高品质,增强企业竞争力与盈利能力。

纸盒天地盖工艺:
纸盒天地盖的成型过程涵盖多个步骤,如上料、折边、上胶、定位贴合以及盒体成型等。在这些环节中,“天地盖定位贴合”尤为关键,因其对精度和速度的要求极高,直接决定了产品的外观一致性和成型质量。

▲纸盒天地盖工艺效果动图▲
市面上常见视觉纸盒天地盖贴合方案:
工业生产中常用的物料定位方法主要依赖机器视觉方案,通过工业相机采集图像,结合图像处理算法识别物料边缘特征,计算实际位置。该方案需在生产线上方安装相机,配备图像处理系统和光源模组,并依赖高性能处理器和复杂算法模型,以确保识别效率和准确性。
然而,该方案存在一系列局限,例如:
- 成本高、调试复杂等问题,尤其对中小企业而言,采购和维护压力较大;
- 在高速生产环境下,相机曝光时间限制可能导致图像模糊,影响边缘特征提取;
- 环境光干扰和物料反光也会降低图像质量,进而影响定位精度;
- 在强光、粉尘等复杂环境中,传统视觉系统的可靠性和稳定性显著下降。
正运动解决方案:
针对传统工业相机方案成本高、维护复杂的痛点,正运动推出了创新的传感器跟随纸盒天地盖贴合方案。该方案具有调试简单、成本低、精度稳定等优势,可轻松适配不同规格和角度的来料。
方案通过控制模组移动传感器扫描纸张边缘,实时计算偏移量并传输给机器人,实现无缝生产。支持单定和双定配置,适应多种场景,配备直观的生产界面,便于实时监控和操作。引导式配置界面简化流程,帮助用户快速上手,显著提升生产便捷性和效率。

01 机器视觉运动控制一体机在天地盖同步跟随贴合解决方案
机器视觉运动控制一体机在天地盖同步跟随贴合解决方案
▲传感器跟随纸盒天地盖贴合运行视频▲
正运动传感器同步跟随纸盒天地盖贴合解决方案设计

- 24DI:接原点、限位等传感器,以及开关信号、编码器、负压表等;
- 12DO:气缸、抓盘、吸气、吹气、铲刀、压盒、夹盒、推盒、三色灯蜂呜器等;
- EtherCAT接口:接EtherCAT总线驱动器,控制SCARA机器人、传送带和模组;
- RS232通信接口:接第三方产品通讯。
运动控制实现过程
该解决方案创新性地采用双模组设计,集成高精度色标传感器,能够对纸张边缘进行快速、精准的扫描,并实时计算面纸的偏移位置。结合高灵活性的SCARA机械手,系统凭借其卓越的定位精度和快速响应能力,可迅速调整至偏移位置并完成精准组装,实现全流程无缝衔接,显著提升了产线的生产效率,充分满足高效、稳定的生产需求。

传感器同步跟随纸盒天地盖贴合工艺流程

方案应用优势
- 高效精准定位
采用先进的传感器定位技术,处理速度仅需10ms,相比传统相机方案提升约100倍,且不受光线干扰,确保精度稳定可靠。
- 无缝高效生产
整线运行无需停顿,快速检测面纸偏移角度并由机器人自动贴合,大幅提升生产效率,缩短生产节拍。
- 操作简便易用
配备友好的人机交互界面,内置配置向导和直观的补偿界面,调试过程简单快捷,降低操作难度,提升使用体验。
解决方案硬件配置

02 高集成机器视觉运动控制一体机VPLC712
正运动技术VPLC712机器视觉运动控制一体机是一款基于x86架构的EtherCAT总线视觉运动控制器,采用一体化设计,将实时机器视觉、运动控制、IO和监控集成于一台多核控制器上,实现多任务并行实时处理自动化设备任务,通过共享内存机制,将PC部分硬件资源通过MotionRT7进行配置,实现核内高速交互,驱动执行器进行对应操作,完成设备整体的控制。
VPLC系列机器视觉运动控制一体机的安装与拆卸过程便捷,占地空间小,还能与其它控制单元部件(如伺服驱动器、传感器、编码器、控制阀等)无缝集成,提供一个完整端到端的视觉运动控制解决方案。

VPLC712机器视觉运动控制一体机,本身最多支持64轴,EtherCAT最小通讯周期可达到500us;板载20数字输入,20数字输出以及4路高速锁存输入;板载2路本地差分脉冲轴、2路AD和2路DA。
正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位_XPCIe/XPCI系列运动控制卡等。
相关文章:
机器视觉运动控制一体机在天地盖同步跟随贴合解决方案
市场应用背景 纸盒天地盖是一种包装形式,广泛应用于消费电子、食品礼盒、奢侈品及化妆品等领域。其采用高强度纸板,经过预组装处理,结构坚固稳定,能有效保护产品并提升品牌形象。随着包装行业快速发展,市场对天地盖的…...

贪心算法一
> 作者:დ旧言~ > 座右铭:松树千年终是朽,槿花一日自为荣。 > 目标:了解什么是贪心算法,并且掌握贪心算法。 > 毒鸡汤:有些事情,总是不明白,所以我不会坚持。早安! >…...

什么是全栈?
🤟致敬读者 🟩感谢阅读🟦笑口常开🟪生日快乐⬛早点下班 📘博主相关 🟧博主信息🟨博客首页🟫专栏推荐🟥活动信息 📃文章前言 🔷文章均为学习工…...

后端-Java虚拟机
Java虚拟机 Java虚拟机的组成 Java虚拟机的组成由类加载器ClassLoader、运行时数据区域(JVM管理的内存)和执行引擎(即时遍历器、解释器垃圾回收器) 类加载器加载class字节码文件中的内容到内存运行时数据区域负责管理jvm使用到…...

Android 低功率蓝牙之BluetoothGattCallback回调方法详解
BluetoothGattCallback 是 Android 中用于处理蓝牙低功耗(BLE)设备通信的核心回调类。它负责处理与 BLE 设备的连接、服务发现、数据读写等操作的结果。以下是对 BluetoothGattCallback 的详细解析: 1. onConnectionStateChange 触发时机&am…...

K8S学习之基础十四:k8s中Deployment控制器概述
Deployment控制器概述: Deployment控制器是k8s中最常用的资源对象,为Replicaset和Pod创建提供了一种声明式的定义方法,在Deployment对象中描述一个期望的状态,Deployment控制器就会按照一定的控制速率把实际状态改成期望状态&…...

Vue3快速入门笔记
目录 1.Vue3简介1.1.性能提升1.2.源码升级1.3.拥抱TypeScript1.4.新特性 2.创建Vue3工程2.1.基于 vue-cli 创建2.2. 基于 vite 创建(推荐)2.3.代码运行 3.Vue3核心语法3.1.OptionsAPI(选项式API) 与 CompositionAPI(组合式API)3.2.setup3.3.ref 创建&…...

【LeetCode104】二叉树的最大深度
题目 给定一个二叉树 root ,返回其最大深度。 二叉树的 最大深度 是指从根节点到最远叶子节点的最长路径上的节点数。 思路与算法 树的最大深度可以通过其左子树和右子树的最大深度来定义。对于给定节点,最大深度为 1(当前节点࿰…...
SQLAlchemy系列教程:理解SQLAlchemy元数据
SQLAlchemy是Python开发人员的强大ORM工具。SQLAlchemy中的元数据是对象-关系映射配置的集合,允许开发人员无缝地定义和使用数据库模式。 使用元数据 SQLAlchemy中的元数据充当各种数据库描述符(如表、列和索引)的容器。这使开发人员能够通…...
)
Apache Shiro 反序列化漏洞全解析(Shiro-550 Shiro-721)
一、前言 Apache Shiro 是一个强大的 Java 安全框架,广泛用于用户认证、授权、加密和会话管理。然而,由于 Shiro 在某些版本中存在反序列化漏洞,攻击者可以通过特定手法实现远程代码执行(RCE),进而获取服务…...

计算机毕业设计Python+DeepSeek-R1大模型空气质量预测分析(源码+文档+PPT+讲解)
温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 温馨提示:文末有 CSDN 平台官方提供的学长联系方式的名片! 作者简介:Java领…...
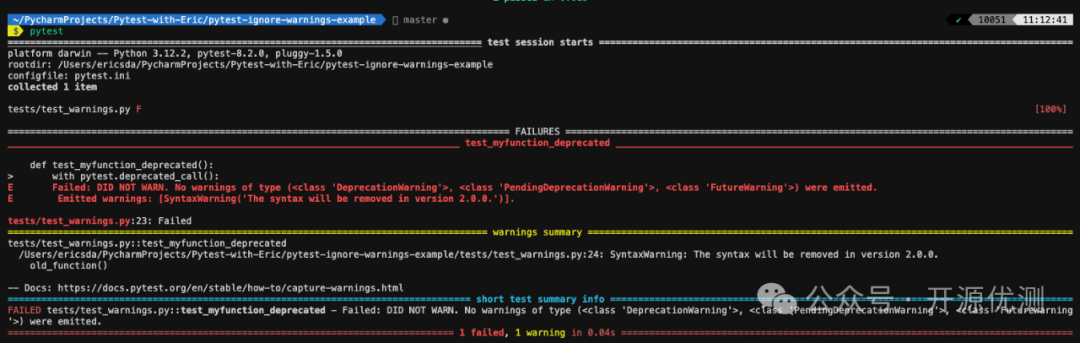
实例详细演示在Pytest中如何忽略警告
关注开源优测不迷路 大数据测试过程、策略及挑战 测试框架原理,构建成功的基石 在自动化测试工作之前,你应该知道的10条建议 在自动化测试中,重要的不是工具 当你尝试运行Pytest代码时,那些不相关的警告突然弹出,是不是…...

03 HarmonyOS Next仪表盘案例详解(二):进阶篇
温馨提示:本篇博客的详细代码已发布到 git : https://gitcode.com/nutpi/HarmonyosNext 可以下载运行哦! 文章目录 前言1. 响应式设计1.1 屏幕适配1.2 弹性布局 2. 数据展示与交互2.1 数据卡片渲染2.2 图表区域 3. 事件处理机制3.1 点击事件处理3.2 手势…...
mysql进阶(三)
MySQL架构和存储引擎 1. MySQL架构 MySQL8.0服务器是由连接池、服务管理⼯具和公共组件、NoSQL接⼝、SQL接⼝、解析器、优化 器、缓存、存储引擎、⽂件系统组成。MySQL还为各种编程语⾔提供了⼀套⽤于外部程序访问服务器 的连接器。整体架构图如下所⽰: 2. 连接层 …...

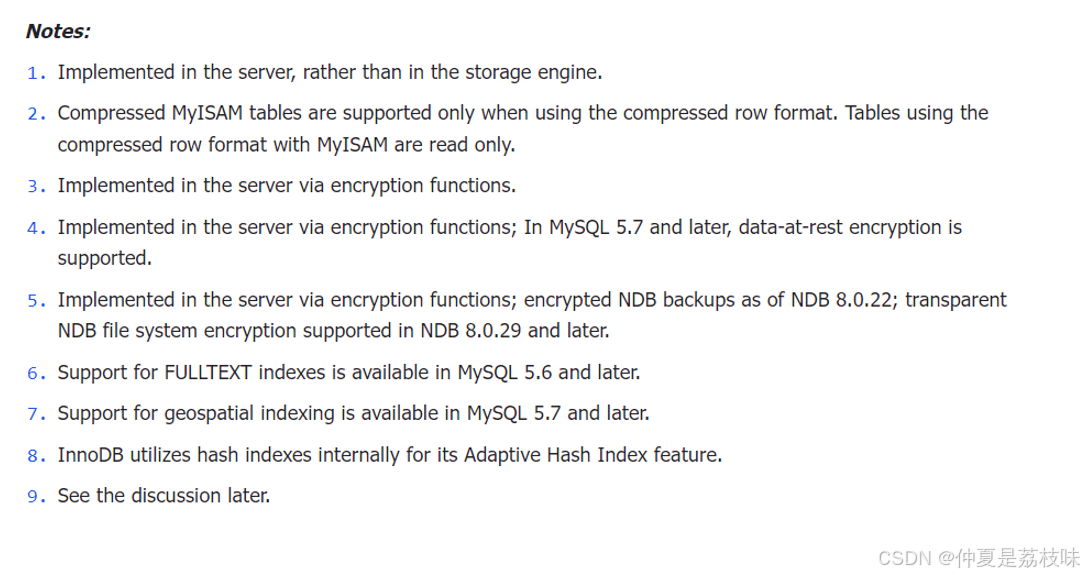
MySQL 架构、索引优化、DDL解析、死锁排查
私人博客传送门 MySQL 认识索引 | 魔筝炼药师 MySQL 索引优化 | 魔筝炼药师 OnlineDDL(在 MySQL 5.7 数据库里,InnoDB引擎,执行一条DDL会发生什么事情) | 魔筝炼药师 MySQL 死锁排查 | 魔筝炼药师...
AVM 环视拼接 鱼眼相机
https://zhuanlan.zhihu.com/p/651306620 AVM 环视拼接方法介绍 从内外参推导IPM变换方程及代码实现(生成AVM环视拼接图)_avm拼接-CSDN博客 经典文献阅读之--Extrinsic Self-calibration of the Surround-view System: A Weakly... (环视系统的外参自…...

【Flink银行反欺诈系统设计方案】5.反欺诈系统全生命周期设计
【Flink银行反欺诈系统设计方案】反欺诈系统全生命周期设计 概要:1. 事前反欺诈准备核心模块与架构: 2. 事中反欺诈发现与告警核心模块与架构: 3. 事后反欺诈事件分析核心模块与架构: 4. 反欺诈闭环架构设计整体技术栈:…...
aardio - 虚表 —— 两个虚表之间互相拖动交换数据
插入到虚表末尾的方法: import win.ui; import godking.vlistEx; /*DSG{{*/ mainForm win.form(text"vlistEx - table adapter";right849;bottom578;border"thin") mainForm.add( radiobutton{cls"radiobutton";text"移动&qu…...
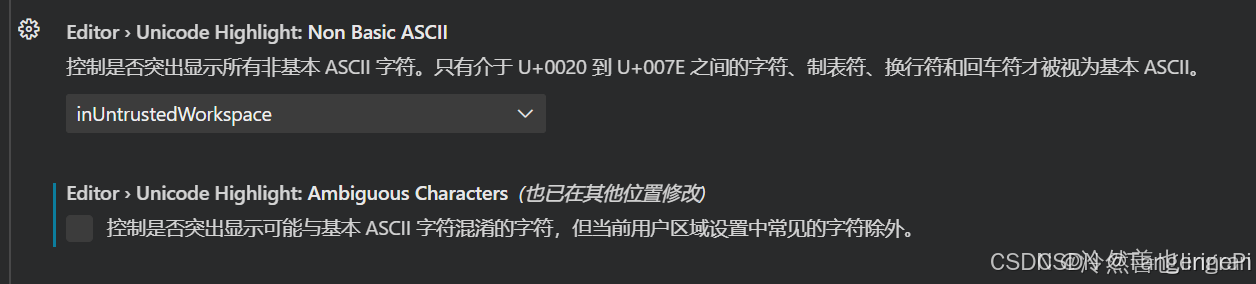
VScode 中文符号出现黄色方框的解决方法
VScode 中文符号出现黄色方框的解决方法 我的vscode的python多行注释中会将中文字符用黄色方框框处: 只需要打开设置搜索unicode,然后将这一项的勾选取消掉就可以了: 取消之后的效果如下: 另一种情况:中文显示出现黄色…...

LINUX网络基础 [二] - 网络编程套接字,UDP与TCP
目录 前言 一. 端口号的认识 1.1 端口号的作用 二. 初识TCP协议和UDP协议 2.1 TCP协议 TCP的特点 使用场景 2.2 UDP协议 UDP的特点 使用场景 2.3 TCP与UDP的对比 2.4 思考 2.5 总结 三. 网络字节序 3.1 网络字节序的介绍 3.2 网络字节序思考 四. socket接口 …...

ESP32-S2物联网实战:IPv6配置与Adafruit IO双向通信
1. 项目概述与核心价值如果你手头有一块ESP32-S2开发板,并且已经厌倦了仅仅让它连上Wi-Fi、点个灯,想让它真正“活”起来,成为一个能融入现代互联网、能与云端自由对话的智能节点,那么这篇文章就是为你准备的。我们将深入两个在物…...

构建本地化个人助理系统:事件驱动架构与模块化设计实践
1. 项目概述:一个高度可定制的个人助理系统最近在GitHub上看到一个挺有意思的项目,叫“Personal-Assistant”,作者是idk-man69。光看名字,你可能会觉得这又是一个类似Siri或Google Assistant的语音助手,但点进去仔细研…...

告别ET1100?聊聊AX58100这颗高性价比EtherCAT从站芯片的升级体验
告别ET1100?AX58100高性价比EtherCAT从站芯片的工业升级实战 当工业设备制造商面临从传统控制架构向实时以太网迁移时,EtherCAT从站芯片的选型往往成为关键转折点。十年前,ET1100凭借其稳定的性能和相对友好的开发门槛,成为许多工…...

终极指南:使用Python开源工具破解百度网盘限速,实现高速免费下载
终极指南:使用Python开源工具破解百度网盘限速,实现高速免费下载 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 还在为百度网盘几十KB的下载速度而烦恼…...

开源机械爪控制库:从PID算法到ROS集成的全栈开发指南
1. 项目概述:一个开源的机械爪设计与控制库最近在机器人硬件开发的圈子里,开源项目“MeyerZhou/openclaw”引起了不少创客和机器人爱好者的注意。简单来说,这是一个专注于机械爪(或称机械手、夹爪)设计与控制的代码库和…...
)
从图片到摄像头:用YOLOv8n.pt模型在Win10上实现实时目标检测(代码+命令详解)
从图片到摄像头:用YOLOv8n.pt模型在Win10上实现实时目标检测(代码命令详解) 当计算机视觉遇上边缘计算,目标检测技术正在重塑人机交互的边界。YOLOv8作为当前最先进的实时检测框架之一,其轻量级版本yolov8n.pt在普通消…...

Pandrator:基于Python的自动化内容生成与数据转换工具实践
1. 项目概述与核心价值最近在折腾一些自动化数据处理和内容生成的工作流,发现了一个挺有意思的开源项目,叫Pandrator。乍一看这个名字,可能会联想到“潘多拉”和“生成器”的结合,实际上它也确实是一个功能强大的内容转换与生成工…...

CircuitPython硬件交互实战:引脚命名、模块管理与内存优化
1. 项目概述:CircuitPython硬件交互的基石 如果你刚开始接触CircuitPython,或者从Arduino转过来,可能会对如何控制板子上的某个引脚感到困惑。板子上明明印着“A0”、“D13”,但在代码里到底该怎么写? board.A0 和 …...

柔性3D打印与生物仿生设计:从TPU材料到空气喷涂的完整实践
1. 项目概述:当柔性3D打印遇上生物仿生美学如果你和我一样,玩3D打印玩久了,总会对那些千篇一律的硬质塑料件感到一丝审美疲劳。我们总在追求更高的精度、更强的结构,却常常忽略了材料本身可以带来的、截然不同的体验。直到我开始接…...

AI全栈开发实战:基于Cursor的智能代码生成与架构设计
1. 项目概述:当AI代码助手遇上全栈开发最近在GitHub上看到一个挺有意思的项目,叫“Cursor-FullStack-AI-App”。光看名字,你大概能猜到它和Cursor这个AI代码编辑器有关,并且涉及全栈应用开发。但它的价值远不止于此。作为一个在前…...