Chapter11.3:MATLAB_SIMULINK在离散系统中的应用
该系列博客主要讲述Matlab软件在自动控制方面的应用,如无自动控制理论基础,请先学习自动控制系列博文,该系列博客不再详细讲解自动控制理论知识。
自动控制理论基础相关链接:https://blog.csdn.net/qq_39032096/category_10287468.html?spm=1001.2014.3001.5482
博客参考书籍:《MATLAB/Simulink与控制系统仿真》。
3.MATLAB/SIMULINK在离散系统中的应用
3.1 MATLAB/SIMULINK在离散系统中常用函数
【连续系统模型与离散系统模型转换函数】
| 函数 | 调用格式 | 函数说明 |
|---|---|---|
| c2d{\rm c2d}c2d | sysd=c2d(sysc,Ts,′method′){\rm sysd=c2d(sysc,Ts,'method')}sysd=c2d(sysc,Ts,′method′) | 连续时间LTI{\rm LTI}LTI系统模型转换为离散时间系统模型 |
| d2c{\rm d2c}d2c | sysc=d2c(sysd,′method′){\rm sysc=d2c(sysd,'method')}sysc=d2c(sysd,′method′) | 离散时间LTI{\rm LTI}LTI系统模型转换为连续时间系统模型 |
| d2d{\rm d2d}d2d | sys=d2d(sysd,Ts){\rm sys=d2d(sysd,Ts)}sys=d2d(sysd,Ts) | 离散时间系统模型转换为新的Ts{\rm Ts}Ts离散时间系统模型 |
【method{\rm method}method功能说明】
| 选项 | 功能说明 | 选项 | 功能说明 |
|---|---|---|---|
| ′zoh′{\rm 'zoh'}′zoh′ | 对输入信号加零阶保持器 | ′tustin′{\rm 'tustin'}′tustin′ | 双线性变换方法 |
| ′foh′{\rm 'foh'}′foh′ | 对输入信号加一阶保持器 | ′prewarp′{\rm 'prewarp'}′prewarp′ | 预先转折变换方法,即改进的双线性变换方法 |
| ′imp′{\rm 'imp'}′imp′ | 脉冲不变变换方法 | ′matched′{\rm 'matched'}′matched′ | 零极点匹配变换方法 |
【离散系统时域响应函数】
| 函数名 | 调用格式 | 功能说明 |
|---|---|---|
| dstep{\rm dstep}dstep | dstep(dnum,dden,n)y=dstep(dnum,dden,n)\begin{aligned}&{\rm dstep(dnum,dden,n)}\\&{\rm y=dstep(dnum,dden,n)}\end{aligned}dstep(dnum,dden,n)y=dstep(dnum,dden,n) | 求离散系统单位阶跃响应 |
| dimpulse{\rm dimpulse}dimpulse | dimpulse(dnum,dden,n)y=dimpulse(dnum,dden,n)\begin{aligned}&{\rm dimpulse(dnum,dden,n)}\\&{\rm y=dimpulse(dnum,dden,n)}\end{aligned}dimpulse(dnum,dden,n)y=dimpulse(dnum,dden,n) | 求离散系统单位脉冲响应 |
| dlsim{\rm dlsim}dlsim | dlsim(dnum,dden,u)y=dlsim(dnum,dden,u)\begin{aligned}&{\rm dlsim(dnum,dden,u)}\\&{\rm y=dlsim(dnum,dden,u)}\end{aligned}dlsim(dnum,dden,u)y=dlsim(dnum,dden,u) | 求离散系统在输入u{\rm u}u下的响应 |
注:n{\rm n}n为采样次数,u{\rm u}u为输入函数;
【离散系统频域响应函数】
| 函数名 | 调用格式 | 功能说明 |
|---|---|---|
| dbode{\rm dbode}dbode | dbode(dnum,dden,Ts,w)[mag,phase,w]=dbode(dnum,dden,Ts,w)\begin{aligned}&{\rm dbode(dnum,dden,Ts,w)}\\&{\rm [mag,phase,w]=dbode(dnum,dden,Ts,w)}\end{aligned}dbode(dnum,dden,Ts,w)[mag,phase,w]=dbode(dnum,dden,Ts,w) | 离散Bode{\rm Bode}Bode图 |
| dnyquist{\rm dnyquist}dnyquist | dnyquist(dnum,dden,Ts,w)[re,im,w]=dnyquist(dnum,dden,Ts,w)\begin{aligned}&{\rm dnyquist(dnum,dden,Ts,w)}\\&{\rm [re,im,w]=dnyquist(dnum,dden,Ts,w)}\end{aligned}dnyquist(dnum,dden,Ts,w)[re,im,w]=dnyquist(dnum,dden,Ts,w) | 离散Nyquist{\rm Nyquist}Nyquist图 |
| dnichols{\rm dnichols}dnichols | dnichols(dnum,dden,Ts,w)[re,im,w]=dnichols(dnum,dden,Ts,w)\begin{aligned}&{\rm dnichols(dnum,dden,Ts,w)}\\&{\rm [re,im,w]=dnichols(dnum,dden,Ts,w)}\end{aligned}dnichols(dnum,dden,Ts,w)[re,im,w]=dnichols(dnum,dden,Ts,w) | 离散Nichols{\rm Nichols}Nichols图 |
| margin{\rm margin}margin | margin(dsys)[Gm,Pm,Wcg,Wcp]=margin(dsys)\begin{aligned}&{\rm margin(dsys)}\\&{\rm [Gm,Pm,Wcg,Wcp]=margin(dsys)}\end{aligned}margin(dsys)[Gm,Pm,Wcg,Wcp]=margin(dsys) | 离散Bode{\rm Bode}Bode图,显示频域性能参数 |
注:Ts{\rm Ts}Ts为采样周期,mag{\rm mag}mag为幅值向量,phase{\rm phase}phase为相交向量,Gm{\rm Gm}Gm为增益裕量,Pm{\rm Pm}Pm为相角裕量,re{\rm re}re为Nyquist{\rm Nyquist}Nyquist图或Nichols{\rm Nichols}Nichols图实部向量,im{\rm im}im为Nyquist{\rm Nyquist}Nyquist图或Nichols{\rm Nichols}Nichols图虚部向量;
3.2 实战部分
3.2.1 实战1
实验要求:已知一个连续线性系统如下图所示,其中:Gp(s)=1s(s+1)G_p(s)=\displaystyle\frac{1}{s(s+1)}Gp(s)=s(s+1)1,用零阶保持器方法、一阶保持器方法、双线性变换方法和根匹配方法将此连续系统离散化,其中采样周期为:Ts=0.1sT_s=0.1{\rm s}Ts=0.1s。

解:
% 实例Chapter11.3.2.1
clc;clear;num=[1];den=[1,1,0];G=tf(num,den); % 连续系统传递函数模型
Ts=0.1;Gd1=c2d(G,Ts,'zoh'); % 零阶保持器方法
Gd2=c2d(G,Ts,'foh'); % 一阶保持器方法
Gd3=c2d(G,Ts,'tustin'); % 双线性变换方法
Gd4=c2d(G,Ts,'matched'); % 零极点匹配方法Gd1,Gd2,Gd3,Gd4
% 结果显示:% 零阶保持器方法
Gd1 =0.004837 z + 0.004679----------------------z^2 - 1.905 z + 0.9048% 一阶保持器方法
Gd2 =0.001626 z^2 + 0.006344 z + 0.001547------------------------------------z^2 - 1.905 z + 0.9048% 双线性变换方法
Gd3 =0.002381 z^2 + 0.004762 z + 0.002381------------------------------------z^2 - 1.905 z + 0.9048% 零极点匹配变换方法
Gd4 =0.004761 z + 0.004761----------------------z^2 - 1.905 z + 0.9048
3.2.2 实战2
实验要求:已知一个连续系统如下图所示,其中:G1(s)=2s(s+30),G2(s)=10s2+6s+5G_1(s)=\displaystyle\frac{2}{s(s+30)},G_2(s)=\displaystyle\frac{10}{s^2+6s+5}G1(s)=s(s+30)2,G2(s)=s2+6s+510,采样周期Ts=0.1sT_s=0.1{\rm s}Ts=0.1s,求系统的脉冲闭环传递函数。

解:
% 实例Chapter11.3.2.2
clc;clear;Ts=0.1;
num1=[2];den1=[1,30,0];
num2=[10];den2=[1,6,5];G1=tf(num1,den1);
G2=tf(num2,den2);% 采用零阶保持器方法进行系统变换
G1d=c2d(G1,Ts);
G2d=c2d(G2,Ts);Gd=G1d*G2d;
GHd=feedback(Gd,1); % 闭环系统模型% 模型显示
G1d,G2d,GHd
% 结果显示:% G1的离散模型
G1d =0.004555 z + 0.00178----------------------z^2 - 1.05 z + 0.04979% G2的离散模型
G2d =0.04117 z + 0.03372----------------------z^2 - 1.511 z + 0.5488% 闭环离散模型
GHd =0.0001875 z^2 + 0.0002268 z + 6e-05------------------------------------------------z^4 - 2.561 z^3 + 2.185 z^2 - 0.6512 z + 0.02738
3.2.3 实战3
实验要求:使用MATLAB{\rm MATLAB}MATLAB绘制离散系统G(z)=2z2−3.4z+1.5z2−1.6z+0.8G(z)=\displaystyle\frac{2z^2-3.4z+1.5}{z^2-1.6z+0.8}G(z)=z2−1.6z+0.82z2−3.4z+1.5的带栅格线的根轨迹图。
解:
% 实例Chapter11.3.2.3
clc;clear;num=[2,-3.4,1.5];den=[1,-1.6,0.8];
zgrid('new');rlocus(num,den);
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('离散系统的根轨迹图','FontSize',15);

3.2.4 实战4
实验要求:已知系统闭环传递函数为:G(z)=z3−1.3z2+1.22z+0.51z4+0.522z3+0.4z2+0.0086z−0.3915,T=0.5G(z)=\displaystyle\frac{z^3-1.3z^2+1.22z+0.51}{z^4+0.522z^3+0.4z^2+0.0086z-0.3915},T=0.5G(z)=z4+0.522z3+0.4z2+0.0086z−0.3915z3−1.3z2+1.22z+0.51,T=0.5,绘制此系统的零极点图,判断此系统的稳定性。
解:
% 实例Chapter11.3.2.4
clc;clear;% 建立系统模型
num=[1,-1.3,1.22,0.51];
den=[1,0.522,0.4,0.0086,-0.3915];
G=tf(num,den);% 绘制零极点图
pzmap(G);
axis([-1.2,1.2,-1.2,1.2]);axis equal;
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('离散系统的零极点图','FontSize',15);

- 由零极点图可知,闭环传递函数所有极点都位于单位圆内部,闭环系统稳定;
3.2.5 实战5
实验要求:若某控制系统结构如下图所示,其中:D1(z)=3.4z−1−1.5z−21−1.6z−1+0.8z−2D_1(z)=\displaystyle\frac{3.4z^{-1}-1.5z^{-2}}{1-1.6z^{-1}+0.8z^{-2}}D1(z)=1−1.6z−1+0.8z−23.4z−1−1.5z−2,G1G_1G1是零阶保持器,G1(s)=1−e−0.05ss,G2(s)=0.25s2+3s+2G_1(s)=\displaystyle\frac{1-{\rm e}^{-0.05s}}{s},G_2(s)=\displaystyle\frac{0.25}{s^2+3s+2}G1(s)=s1−e−0.05s,G2(s)=s2+3s+20.25,采样周期:Ts=0.05sT_s=0.05{\rm s}Ts=0.05s,求系统开环和闭环的zzz传递函数,及sss传递函数,当输入为单位阶跃函数时,求其输出。

解:
【求系统开环和闭环sss传递函数】
% 实例Chapter11.3.2.5
clc;clear;% 系统开环和闭环s传递函数
dnum1=[3.4,-1.5];dden1=[1,-1.6,0.8];Ts=0.05;
sysd1=tf(dnum1,dden1,Ts); % D1的z传递函数模型
sysc1=d2c(sysd1,'zoh');num2=[0.25];den2=[1,3,2];sys2=tf(num2,den2);
sysc2=sysc1*sys2 % 开环传递函数
sysbc=feedback(sysc2,1) % 闭环传递函数[num,den]=tfdata(sysbc,'v'); % 提取闭环传递函数的分子和分母
p=roots(den)
% 结果显示:% 开环s传递函数
sysc2 =13.99 s + 216---------------------------------------------s^4 + 7.463 s^3 + 106.4 s^2 + 281.8 s + 181.9% 闭环s传递函数
sysbc =13.99 s + 216-------------------------------------------s^4 + 7.463 s^3 + 106.4 s^2 + 295.8 s + 398% 特征方程的根
% 由于特征方程的根均在s左半平面,因此,系统是稳定的。
p =-2.1667 + 9.1429i-2.1667 - 9.1429i-1.5647 + 1.4351i-1.5647 - 1.4351i
【求取系统开环和闭环zzz传递函数】
% 系统开环和闭环z传递函数
dnum1=[3.4,-1.5];dden1=[1,-1.6,0.8];Ts=0.05;
sysd1=tf(dnum1,dden1,Ts); % D1的z传递函数模型num2=[0.25];den2=[1,3,2];
sys2=tf(num2,den2);
sysd2=c2d(sys2,Ts,'zoh'); % G1和G2串联的z传递函数模型sysd=sysd1*sysd2 % 系统开环z传递函数
sysbd=feedback(sysd,1) % 系统闭环z传递函数[dnum,dden]=tfdata(sysbd,'v');
pd=roots(dden) % 闭环系统特征根t=0:0.05:5;
y=dstep(dnum,dden,101);
stem(t,y); % 棒图显示响应曲线
xlabel('t');ylabel('y');
grid;
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('控制系统响应曲线','FontSize',15);
% 结果显示:% 开环z传递函数
sysd =0.001011 z^2 + 0.0005156 z - 0.0004242---------------------------------------------z^4 - 3.456 z^3 + 4.63 z^2 - 2.862 z + 0.6886% 闭环z传递函数
sysbd =0.001011 z^2 + 0.0005156 z - 0.0004242----------------------------------------------z^4 - 3.456 z^3 + 4.631 z^2 - 2.861 z + 0.6881% 特征方程的根
pd =0.8030 + 0.3935i0.8030 - 0.3935i0.9250 + 0.0697i0.9250 - 0.0697i

3.2.6 实战6
实验要求:某控制系统结构如下图所示,其中:D1(z)=3.4z−1−1.5z−21−1.6z−1+0.8z−2D_1(z)=\displaystyle\frac{3.4z^{-1}-1.5z^{-2}}{1-1.6z^{-1}+0.8z^{-2}}D1(z)=1−1.6z−1+0.8z−23.4z−1−1.5z−2,G1G_1G1是零阶保持器,G1(s)=1−e−0.05ss,G2(s)=0.25s2+3s+2G_1(s)=\displaystyle\frac{1-{\rm e}^{-0.05s}}{s},G_2(s)=\displaystyle\frac{0.25}{s^2+3s+2}G1(s)=s1−e−0.05s,G2(s)=s2+3s+20.25,采样周期:Ts=0.05sT_s=0.05{\rm s}Ts=0.05s,求系统频率特性参数,绘制系统的Bode{\rm Bode}Bode图、Nyquist{\rm Nyquist}Nyquist图和Nichols{\rm Nichols}Nichols图。

解:
% 实例Chapter11.3.2.6
clc;clear;% 系统开环和闭环s传递函数
dnum1=[3.4,-1.5];dden1=[1,-1.6,0.8];Ts=0.05;
sysd1=tf(dnum1,dden1,Ts); % D1的z传递函数模型num2=[0.25];den2=[1,3,2];sys2=tf(num2,den2);
sysd2=c2d(sys2,Ts,'zoh');
sysd=sysd1*sysd2 % 开环z传递函数[dnumc,ddenc]=tfdata(sysd,'v'); % 提取开环传递函数的零极点figure(1);
[Gm,Pm,Wcg,Wcp]=margin(sysd) % 求系统频率特性参数
margin(sysd);grid;
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('控制系统margin图','FontSize',15);w=0.01:0.01:100;figure(2);
dnyquist(dnumc,ddenc,Ts,w);grid;
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('控制系统nyquist图','FontSize',15);figure(3);
nichols(sysd);grid;
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('控制系统nichols图','FontSize',15);
% 结果显示:% 控制系统开环模型
sysd =0.001011 z^2 + 0.0005156 z - 0.0004242---------------------------------------------z^4 - 3.456 z^3 + 4.63 z^2 - 2.862 z + 0.6886% 频率特性参数
Gm =10.8194Pm =133.7794Wcg =6.4303Wcp =0.5625
【控制系统Bode{\rm Bode}Bode图】

【控制系统Nyquist{\rm Nyquist}Nyquist图】

【控制系统Nichols{\rm Nichols}Nichols图】

3.3 综合实例
实验要求:给定单位负反馈离散控制系统,其采样周期为1s1{\rm s}1s,开环传递函数为:G(s)=s+1s2G(s)=\displaystyle\frac{s+1}{s^2}G(s)=s2s+1与零阶保持器ZOH{\rm ZOH}ZOH串联,开环增益为KKK。求闭环控制系统稳定的条件,且绘制KKK取不同值时闭环系统的阶跃响应曲线。
解:
【STEP1{\rm STEP1}STEP1:建立控制系统的数学模型】
% 实例Chapter11.3.3
clc;clear;% 建立控制系统模型
Ts=1;sys_K=1;
num=[1,1];den=[1,0,0];
sysc=tf(num,den); % 连续系统传递函数
sysd=c2d(sysc,Ts,'zoh'); % 离散系统传递函数
sys_open=sys_K*sysd % 系统的开环传递函数
% 系统开环传递函数
sys_open =1.5 z - 0.5-------------z^2 - 2 z + 1
【STEP2{\rm STEP2}STEP2:绘制系统的根轨迹】
% 绘制系统的根轨迹
figure(1);
rlocus(sysd);axis([-2,2,-1,1]);
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('控制系统根轨迹图','FontSize',15);% 验证临界稳定的K值
% K=2时是临界稳定值
sys_K=2;
figure(2);
margin(sys_K*sysd);
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('控制系统margin图','FontSize',15);figure(3);
[dnum,dden]=tfdata(sys_K*sysd,'v');
dnyquist(dnum,dden,Ts);axis([-5,5,-2.5,2.5]);
grid on;
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('控制系统Nyquist图','FontSize',15);
【控制系统根轨迹图】

【控制系统Bode{\rm Bode}Bode图】

【控制系统Nyquist{\rm Nyquist}Nyquist图】

【STEP3{\rm STEP3}STEP3:控制系统阶跃响应】
% 绘制不同K值的阶跃响应
sys_K=1;
figure(4);
sys_close=feedback(sys_K*sysd,1);
[dnumc,ddenc]=tfdata(sys_close,'v');
dstep(dnumc,ddenc,25);
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('K=1时控制系统阶跃响应','FontSize',15);sys_K=2;
figure(5);
sys_close=feedback(sys_K*sysd,1);
[dnumc,ddenc]=tfdata(sys_close,'v');
dstep(dnumc,ddenc,25);
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('K=2时控制系统阶跃响应','FontSize',15);sys_K=3;
figure(6);
sys_close=feedback(sys_K*sysd,1);
[dnumc,ddenc]=tfdata(sys_close,'v');
dstep(dnumc,ddenc,25);
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('K=3时控制系统阶跃响应','FontSize',15);



- 当K=1K=1K=1时,闭环系统稳定,阶跃响应曲线收敛;
- 当K=2K=2K=2时,闭环系统临界稳定,阶跃响应曲线等幅振荡;
- 当K=3K=3K=3时,闭环系统不稳定,阶跃响应曲线发散;
【完整代码】
% 实例Chapter11.3.3
clc;clear;% 建立控制系统模型
Ts=1;sys_K=1;
num=[1,1];den=[1,0,0];
sysc=tf(num,den); % 连续系统传递函数
sysd=c2d(sysc,Ts,'zoh'); % 离散系统传递函数
sys_open=sys_K*sysd % 系统的开环传递函数% 绘制系统的根轨迹
figure(1);
rlocus(sysd);axis([-2,2,-1,1]);
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('控制系统根轨迹图','FontSize',15);% 验证临界稳定的K值
sys_K=2;
figure(2);
margin(sys_K*sysd);
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('控制系统margin图','FontSize',15);figure(3);
[dnum,dden]=tfdata(sys_K*sysd,'v');
dnyquist(dnum,dden,Ts);axis([-5,5,-2.5,2.5]);
grid on;
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('控制系统Nyquist图','FontSize',15);% 绘制不同K值的阶跃响应
sys_K=1;
figure(4);
sys_close=feedback(sys_K*sysd,1);
[dnumc,ddenc]=tfdata(sys_close,'v');
dstep(dnumc,ddenc,25);
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('K=1时控制系统阶跃响应','FontSize',15);sys_K=2;
figure(5);
sys_close=feedback(sys_K*sysd,1);
[dnumc,ddenc]=tfdata(sys_close,'v');
dstep(dnumc,ddenc,25);
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('K=2时控制系统阶跃响应','FontSize',15);sys_K=3;
figure(6);
sys_close=feedback(sys_K*sysd,1);
[dnumc,ddenc]=tfdata(sys_close,'v');
dstep(dnumc,ddenc,25);
set(findobj(get(gca,'Children'),'LineWidth',0.5),'LineWidth',1.5);
title('K=3时控制系统阶跃响应','FontSize',15);
=========================COMPLETE================================================={\rm COMPLETE}======================== =========================COMPLETE========================
相关文章:
Chapter11.3:MATLAB_SIMULINK在离散系统中的应用
该系列博客主要讲述Matlab软件在自动控制方面的应用,如无自动控制理论基础,请先学习自动控制系列博文,该系列博客不再详细讲解自动控制理论知识。 自动控制理论基础相关链接:https://blog.csdn.net/qq_39032096/category_10287468…...
过滤器Filter
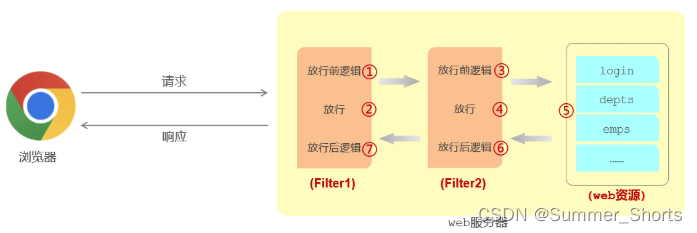
什么是Filter? Filter表示过滤器,是JavaWeb三大组件(Servlet、FIlter、Listener)之一。过滤器可以把对资源的请求拦截下来,总而实现一些特殊的功能 使用过滤器后,要想访问web服务器上的资源,必须…...
MySQL数据同步ES的常用思路和方法
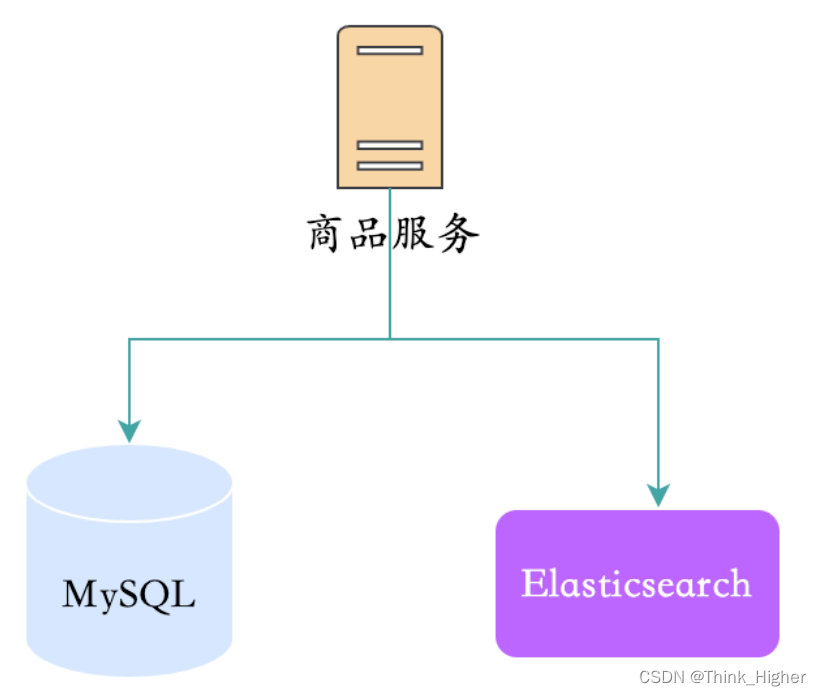
文章目录 1.同步双写2.异步双写3.定时任务4.数据订阅大家应该都在各种电商网站检索过商品,检索商品一般都是通过什么实现呢?搜索引擎Elasticsearch。 那么问题来了,商品上架,数据一般写入到MySQL的数据库中,那么用于检索的数据又是怎么同步到Elasticsearch的呢? 1.同步双…...
spring源码之扫描前设置
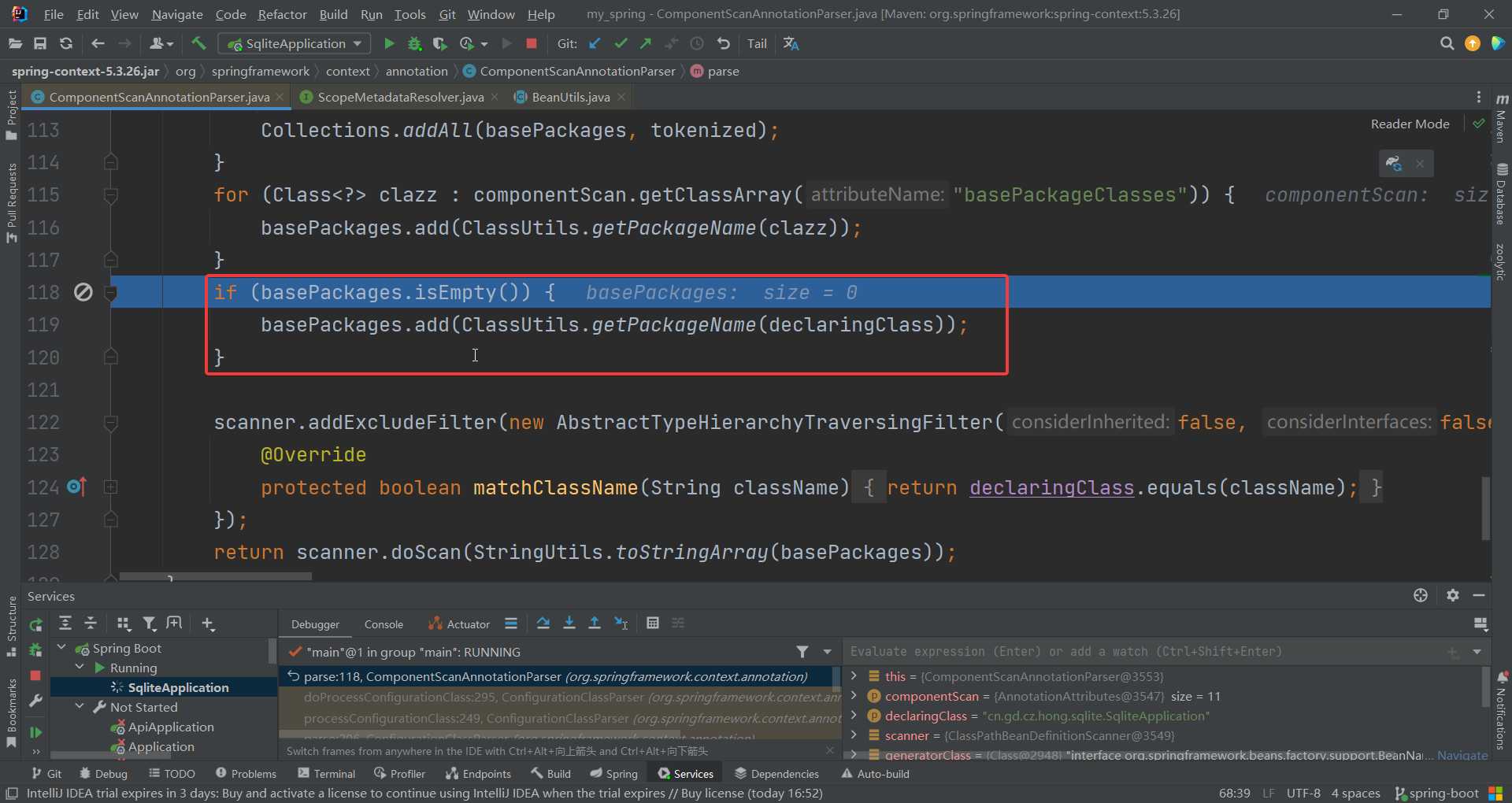
扫描前设置 🛹源码源码说明总结启动一个springboot项目源码 org.springframework.context.annotation.ComponentScanAnnotationParser#parse public Set<BeanDefinitionHolder> parse(AnnotationAttributes componentScan, String declaringClass) {// 创建C…...

C++ 98/03 应该学习哪些知识19
迭代器、空间配置器理解 在 C 中,迭代器是一种可以用来遍历容器中的元素的对象。它们提供了一个类似于指针的接口,允许我们访问容器中的元素,而不必了解容器内部的结构。迭代器是 STL(标准模板库)的核心部分࿰…...

java毕业生就业信息管理系统servlet程序
1.系统登录:系统登录是用户访问系统的路口,设计了系统登录界面,包括用户名、密码和验证码,然后对登录进来的用户判断身份信息,判断是管理员用户还是普通用户。 2.系统用户管理:不管是…...

linux命令-netstat
linux命令-netstat 查看Linux中网络系统状态信息 补充说明 netstat命令 用来打印Linux中网络系统的状态信息,可让你得知整个Linux系统的网络情况。 语法 netstat(选项)选项 -a或--all:显示所有连线中的Socket; -A<网络类型>或--&…...
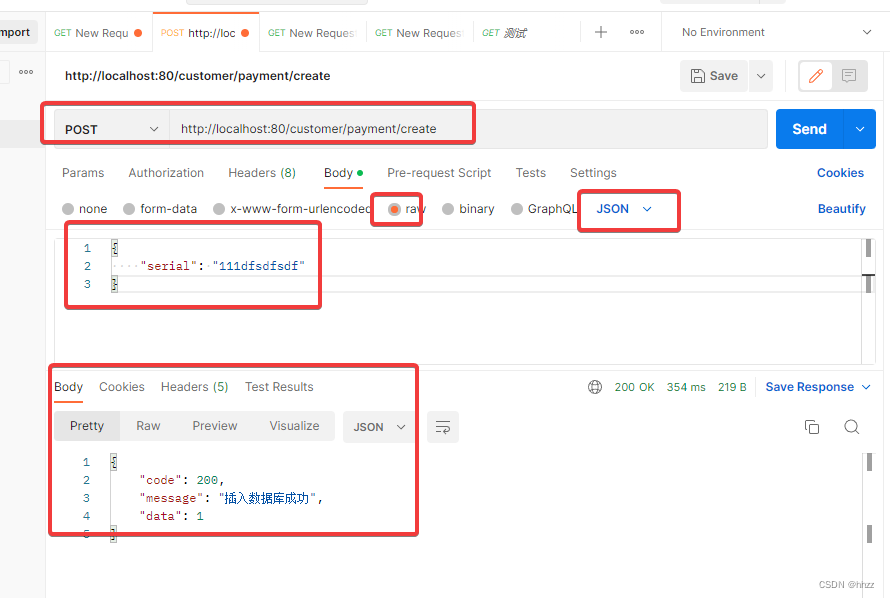
微服务+springcloud+springcloud alibaba学习笔记【Rest微服务工程搭建】(2/9)
Rest微服务工程搭建---学习笔记2/91、简单架构示意图2、创建Cloud-provider-payment8001 微服务提供者Module模块2.1. 建Module2.2. 改pom2.3. 写yml2.4. 主启动2.5. 业务类3、创建Cloud-consumer-order80 微服务消费者订单Module模块3.1. 建Module3.2. 改pom3.3. 写yml3.4. 主…...
【Redis7】Redis7 十大数据类型
【大家好,我是爱干饭的猿,本文重点介绍Redis7 十大数据类型。 后续会继续分享Redis7和其他重要知识点总结,如果喜欢这篇文章,点个赞👍,关注一下吧】 上一篇文章:《【Redis7】Redis7概述、安装…...

java 死锁怎么解决, 盘它
死锁归根结底还是资源的安排有问题如何使用 jps jstack,解决死锁如果是在分布式的系统中, 我该如何一步一步找到对应的堆栈解决死锁问题呢如何利用 skywalking 帮我解决死锁大多数人一辈子只做了三件事,自欺欺人被人欺 如何使用 jps jstack,解决死锁 jps和jstack都…...

【新2023Q2押题JAVA】华为OD机试 - 服务依赖
最近更新的博客 华为od 2023 | 什么是华为od,od 薪资待遇,od机试题清单华为OD机试真题大全,用 Python 解华为机试题 | 机试宝典【华为OD机试】全流程解析+经验分享,题型分享,防作弊指南华为od机试,独家整理 已参加机试人员的实战技巧本篇题解:服务依赖 题目 在某系统中有…...
交友项目【通用设置】三个功能实现
目录 1:交友项目【通用设置】 1.1:查询通用设置 1.1.1:接口地址 1.1.2:流程分析 1.1.3:代码实现 1.2:设置陌生人问题 1.2.1:接口地址 1.2.2:流程分析 1.2.3:代码…...
MongoDB 更新文档(更新多条文档)
上一篇我们介绍了如何更新一条文档,本篇我们介绍一下,如果更新多条文档,我们来回顾一下更新多条文档的语法: db.collection.updateMany(filter, update, options) 上一篇我们对语法中的参数及参数的语法进行了详细的介绍…...

ubuntu20 qt6.4.3 ustc镜像安装 xdma
文件下载地质 命令 ./qt-unified-linux-x64-4.5.2-online.run --mirror https://mirrors.ustc.edu.cn/qtproject没有镜像就下砸错误hash verification while downloading,this is temporary error,please retry 部分安装器不支持 --mirror cd ~/workspace/dma_ip_drivers/X…...
15_I.MX6ULL_LCD显示原理
目录 LCD简介 分辨率 像素格式 LCD屏幕接口 LCD时间参数 RGB LCD屏幕时序 像素时钟 显存 LCD简介 LCD全称是Liquid Crystal Display,也就是液晶显示器,是现在最常用到的显示器,手机、电脑、各种人机交互设备等基本都用到了LCD,最常见就是手机和电脑显示器了。LCD的构造…...
Vue.js 2.0 实例
构造器 每个 Vue.js 应用都是通过构造函数 Vue 创建一个 Vue 的根实例 启动的: var vm new Vue({// 选项 }) 虽然没有完全遵循 MVVM 模式, Vue 的设计无疑受到了它的启发。因此在文档中经常会使用 vm 这个变量名表示 Vue 实例。 在实例化 Vue 时&…...

安全技术和iptables防火墙
目录安全技术Netfilter防火墙工具介绍iptablesfirewalldnftablesiptables的组成概述netfilter与iptables关系iptables的四表五链结构介绍iptables安装iptables的命令格式数据包的常见控制类型iptables 命令常用管理选项添加规则删除规则修改规则 (不推荐使用&#x…...

StringBuilder和StringBuffer的区别
StringBuilder和StringBuffer的用法是一致的,平常我们最多用到的方法就是append()拼接字符串和reverse()翻转字符串等等。二者看起来方法是一样的,确实也是这样,其实它俩唯一的不同在于StringBuilder不是线程安全的,而StringBuffe…...

美团大数据开发转正实习面经(已OC)
一面面试体验整体很不错,面试官很温柔,也不会故意为难你。 一面(2023.3.21) 自我介绍简单介绍项目(研一在国电做的)你认为学习到的技术和实际使用的差距在哪项目中的数据都是哪里来的(集团中各种设备运行的数据)你说你用到了Spark那你介绍一下Spark的组件…...
leedcode刷题(2)
各位朋友们,又是新的一天,不知道大家过得怎样?今天是我leedcode刷题系列的第二篇,那么废话不多说,直接进入我们今天的主题。 文章目录有效的括号题目要求用例输入做题思路代码实现环形链表题目要求用例输入做题思路代码…...

闽北哥-做个无用之人,方成大用
做个无用之人 ——方成大用 “太有用的人,一定走不远。” 🌿 人生是一场‘无心生大用’的修行。 白木香树越能结香,越被千疮百孔; 无用之树,反得自然生长。 💡 真正的价值,不在“有”ÿ…...

C++ 内存分配器工作原理
C内存分配器工作原理探秘 在C中,动态内存管理是程序性能优化的关键环节,而内存分配器则是幕后英雄。它负责在堆上高效分配和释放内存,直接影响程序的运行效率和资源利用率。无论是标准库中的std::allocator,还是自定义的高性能分…...

MAX30102传感器总是不准?Arduino避坑指南:从焊接绝缘到手指摆放的5个关键细节
MAX30102传感器精度优化全攻略:从硬件调试到算法校准的完整解决方案 MAX30102作为一款高集成度生物传感器,在心率、血氧监测领域应用广泛,但许多开发者在Arduino平台上使用时常遇到数据不稳定、测量偏差大的问题。本文将系统性地剖析影响测量…...

单片机通用按键处理模块设计与实现
单片机通用按键处理模块设计与实现1. 项目概述1.1 模块功能特性本按键处理模块为单片机系统提供了一套完整的按键事件处理解决方案,具有以下核心功能:基础按键检测:支持按下(PRESS)和释放(RELEASE)事件检测高级触发模式:长按触发(…...

从新手到专家:OpenCore配置工具OCAT的实战应用指南
从新手到专家:OpenCore配置工具OCAT的实战应用指南 【免费下载链接】OCAuxiliaryTools Cross-platform GUI management tools for OpenCore(OCAT) 项目地址: https://gitcode.com/gh_mirrors/oc/OCAuxiliaryTools 如果你正在为黑苹果系…...

全网最详细的AI产品经理学习路线,非常详细收藏这一篇就够了
前言 AI产品经理作为一个新兴且热门的职业,不仅需要具备传统产品经理的能力,还需要对AI技术有深入的理解和应用。本学习路线旨在帮助有志于成为AI产品经理的学习者系统地掌握所需的知识和技能。 前排提示,文末有大模型AGI-CSDN独家资料包哦…...

企业生产环境怎么正确做 Vibe Coding:不是让 AI 接管,而是把交付流程做成可控系统
这两年,vibe coding 很热。很多团队第一次接触它时,直觉都是:既然 AI 会写代码,那就让它多写一点,人少管一点,速度自然就上来了。 但一进企业生产环境,这种想法通常很快撞墙。 因为企业真正关心…...

Keepalived+Nginx+Tomcat 高可用项目集成 MySQL 数据库全记录
前言在之前的文章中,我搭建了基于 KeepalivedNginxTomcat 的高可用 Web 架构,实现了入口 VIP 漂移和反向代理。但这套架构还缺少“数据层”——所有服务都是无状态的,不能持久化数据。为了让项目更完整,我决定加入 MySQL 数据库&a…...

EPLAN默认工具栏隐藏功能大揭秘:从复制格式到表格式编辑的实战技巧
EPLAN默认工具栏隐藏功能大揭秘:从复制格式到表格式编辑的实战技巧 在电气设计领域,EPLAN作为行业标杆软件,其默认工具栏中隐藏着许多未被充分发掘的效率利器。这些功能往往被常规操作所掩盖,却能在复杂项目设计中节省大量时间。…...

Windows下OpenClaw实战:30分钟接入Qwen3.5-4B-Claude模型
Windows下OpenClaw实战:30分钟接入Qwen3.5-4B-Claude模型 1. 为什么选择WindowsOpenClaw组合 去年我在尝试自动化办公流程时,发现很多AI工具对Windows支持并不友好。直到遇到OpenClaw,这个开源的智能体框架让我眼前一亮——它不仅能像人类一…...