相机雷达时间同步(基于ROS)
文章目录
- 运行环境:
- 思路:
- 同步前和同步后效果对比
- 1.1创建工作空间
- 1.2创建功能包
- 2.1编写源文件
- 2.2编写头文件
- 2.3编写可执行文件
- 2.4配置文件
- 3.1编译运行
- 4.1录制时间同步后的rosbag
- 4.2rviz可视化rosbag
运行环境:
ubuntu20.04 noetic
usb_cam
速腾Robosense 16线
宏基暗影骑士笔记本
思路:
软同步:订阅相机和雷达原始数据,然后进行时间同步,最后将同步后的数据发布出去,通过rosbag record进行录制
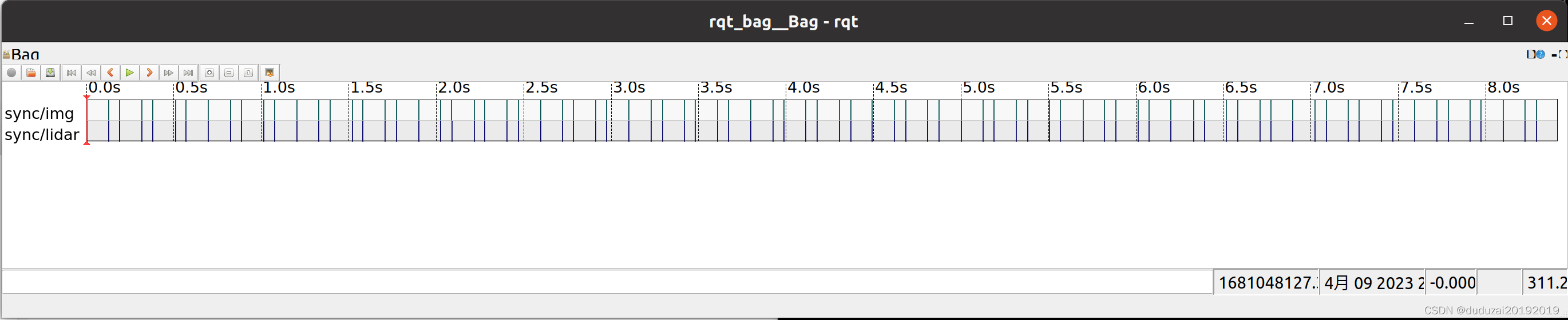
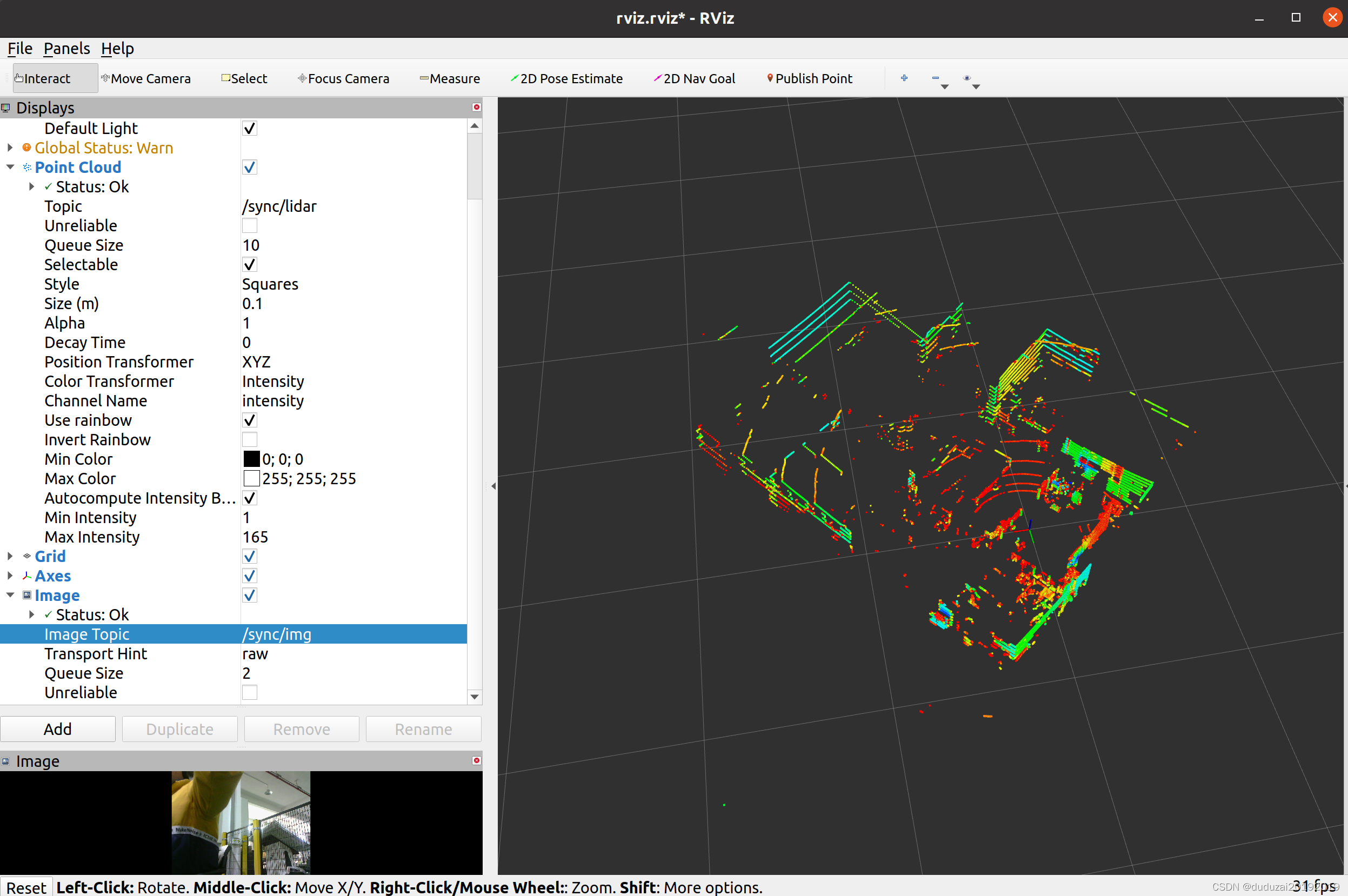
同步前和同步后效果对比
同步前的话题:
/rslidar_packets
/usb_cam/image_raw
# 录制命令rosbag record -O lidar_camera /usb_cam/image_raw /rslidar_points

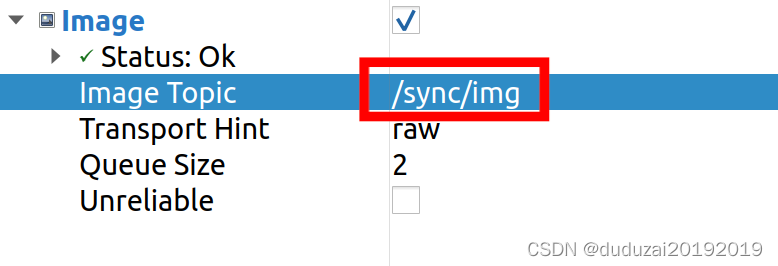
同步后的话题:
/sync/img
/sync/lidar
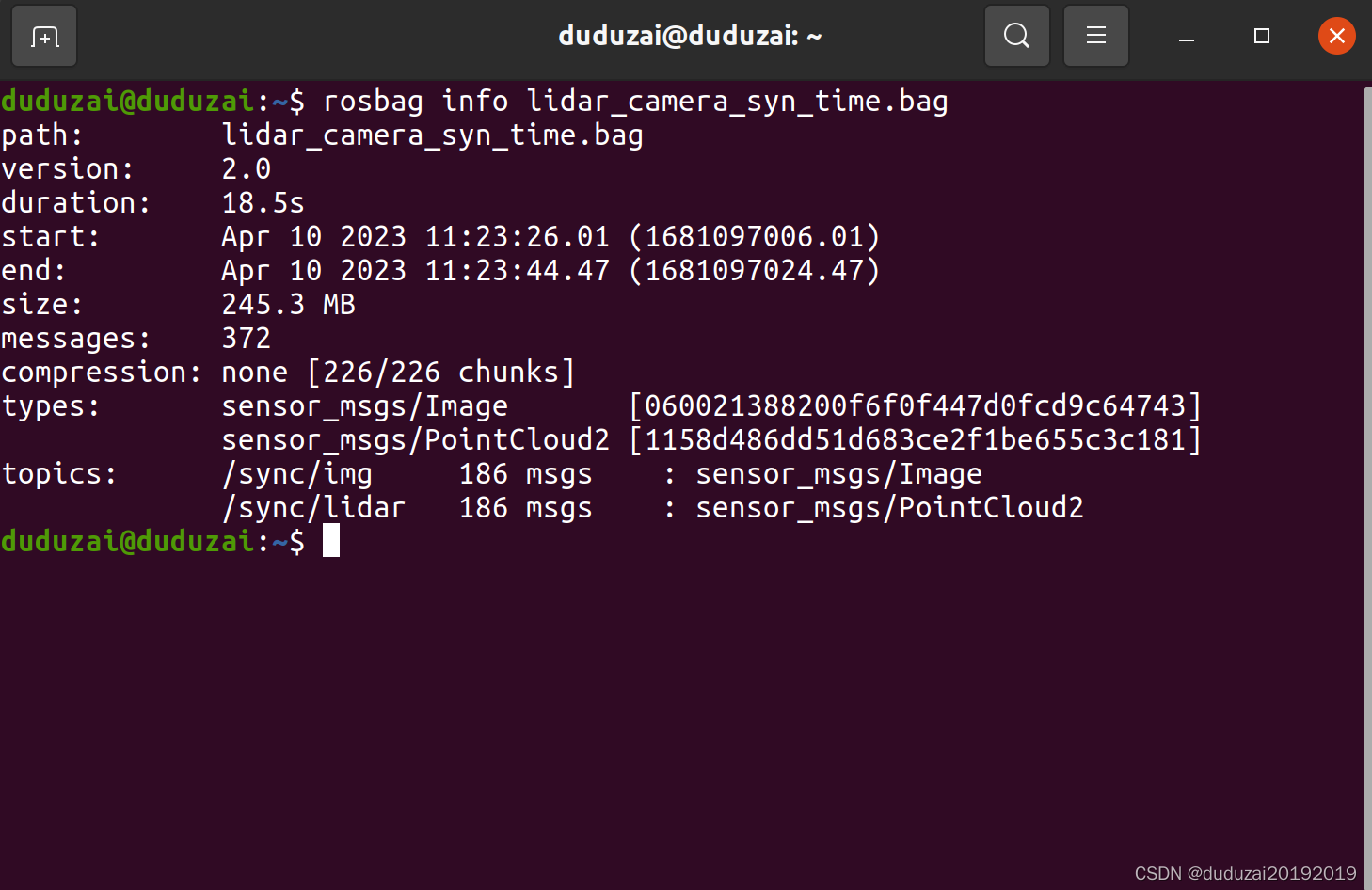
# 录制命令rosbag record -O lidar_camera_syn_time /sync/img /sync/lidar
1.1创建工作空间
mkdir -p sys_time_ws/src
cd sys_time_ws
catkin_make
code .
1.2创建功能包
1) 在工作空间src目录下创建功能包
sys_time
roscpp rospy std_msgs
2.1编写源文件
1)在 src 目录下新建文件 sub_and_pub.cpp
代码解释:
this 关键字指向类创建的对象
registerCallback 绑定回调函数,触发回调函数发布同步后的数据
#include "sys_time/sub_and_pub.h"# 重写头文件中的构造函数subscriberANDpublisher()
# main函数初始化对象(subscriberANDpublisher sp)时自动调用构造函数
subscriberANDpublisher::subscriberANDpublisher()
{//订阅话题lidar_sub.subscribe(nh, "/rslidar_points", 1);camera_sub.subscribe(nh, "/usb_cam/image_raw", 1);//消息过滤器,使用 ApproximateTime 进行时间同步(允许一定程度的时间误差)sync_.reset(new message_filters::Synchronizer<syncpolicy>(syncpolicy(10), camera_sub, lidar_sub));sync_->registerCallback(boost::bind(&subscriberANDpublisher::callback, this, _1, _2));//发布者camera_pub = nh.advertise<sensor_msgs::Image>("sync/img", 10);lidar_pub = nh.advertise<sensor_msgs::PointCloud2>("sync/lidar", 10);
}void subscriberANDpublisher::callback(const sensor_msgs::ImageConstPtr& image, const sensor_msgs::PointCloud2ConstPtr& pointcloud) {ROS_INFO("Received synchronized message!");camera_pub.publish(image);lidar_pub.publish(pointcloud);
}
2.2编写头文件
1)在功能包下的 include/功能包名 目录下新建头文件 sub_and_pub.h
2)配置 includepath 详情见
#ifndef SUB_AND_PUB_H
#define SUB_AND_PUB_H
//ros头文件
#include <ros/ros.h>
//时间同步
#include <message_filters/subscriber.h>
#include <message_filters/sync_policies/approximate_time.h>
#include <message_filters/synchronizer.h>
//传感器消息
#include <sensor_msgs/Image.h>
#include <sensor_msgs/image_encodings.h>
#include <sensor_msgs/PointCloud2.h>class subscriberANDpublisher{
public:subscriberANDpublisher();void callback(const sensor_msgs::ImageConstPtr &image, const sensor_msgs::PointCloud2ConstPtr &pointcloud);private:ros::NodeHandle nh;ros::Publisher camera_pub;ros::Publisher lidar_pub;message_filters::Subscriber<sensor_msgs::PointCloud2> lidar_sub;//雷达订阅message_filters::Subscriber<sensor_msgs::Image> camera_sub;//相机订阅typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image, sensor_msgs::PointCloud2> syncpolicy;//时间戳对齐规则typedef message_filters::Synchronizer<syncpolicy> Sync;boost::shared_ptr<Sync> sync_;//时间同步器};
#endif
2.3编写可执行文件
#include <ros/ros.h>
#include "sys_time/sub_and_pub.h"int main(int argc, char **argv) {ros::init(argc, argv, "node");subscriberANDpublisher sp;ROS_INFO("main done! ");ros::spin();
}
2.4配置文件
1)修改CMakeLists.txt
# 添加message_filters ROS包依赖
find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgsmessage_filters
)# 头文件路径
include_directories(include${catkin_INCLUDE_DIRS}
)# 新建c++库,将头文件和源文件添加到新库里面
add_library(sys_time_libinclude/sys_time/sub_and_pub.hsrc/sub_and_pub.cpp
)# 将src目录下的main.cpp编译成可执行文件
add_executable(main.cpp src/main.cpp)# 将新库和ros库链接起来
target_link_libraries(sys_time_lib${catkin_LIBRARIES}
)# 将可执行文件和新库链接起来
target_link_libraries(main.cppsys_time_lib${catkin_LIBRARIES}
)
2)修改package.xml (实际上不修改也可以通过编译)
<exec_depend>message_filters</exec_depend>
3.1编译运行
1)运行时间同步节点
# 编译
ctrl+shift+broscore
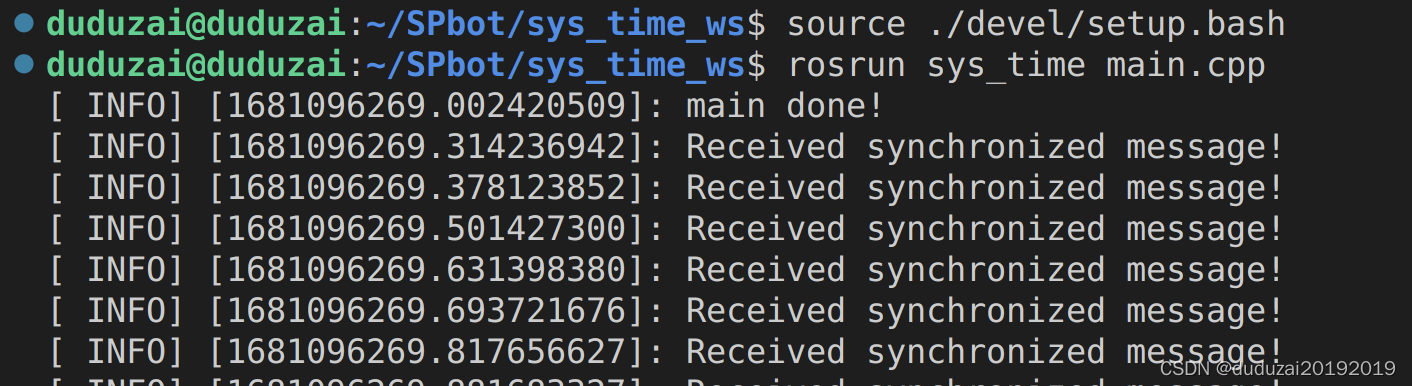
source ./devel/setup.bash
rosrun sys_time main.cpp

2)启动相机
cd usb_cam_ws
source ./devel/setup.bash
roslaunch usb_cam usb_cam-test.launch
3)启动雷达
cd robosense_ws
source ./devel/setup.bash
roslaunch rslidar_sdk start.launch
当相机雷达全部启动后,显示接受到时间同步消息
4.1录制时间同步后的rosbag
lidar_camera_syn_time 是保存的rosbag名称
/sync/img 和 /sync/lidar 是录制的话题名
rosbag record -O lidar_camera_syn_time /sync/img /sync/lidar
# 查看录制好的rosbag
rosbag info lidar_camera_syn_time.bag
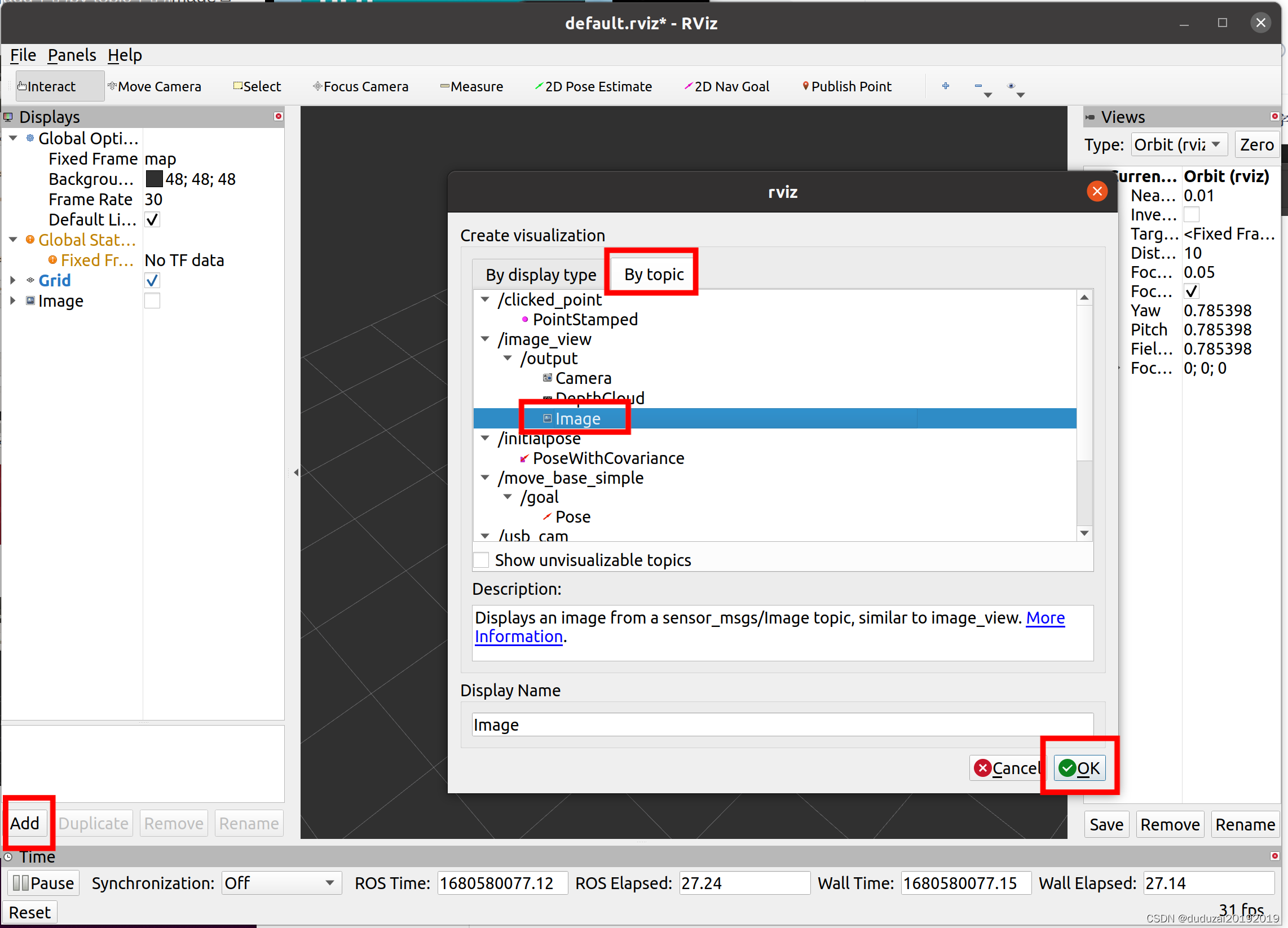
4.2rviz可视化rosbag
配置文件详细步骤见:Robosense激光雷达录制rosbag
1)打开rviz
rviz
2)导入配置文件 file–open cofig
3)添加相机话题
4)播放rosbag
rosbag play lidar_camera_syn_time.bag
相关文章:
相机雷达时间同步(基于ROS)
文章目录运行环境:思路:同步前和同步后效果对比1.1创建工作空间1.2创建功能包2.1编写源文件2.2编写头文件2.3编写可执行文件2.4配置文件3.1编译运行4.1录制时间同步后的rosbag4.2rviz可视化rosbag运行环境: ubuntu20.04 noetic usb_cam 速腾R…...

素数环PrimeRing [3*]
目录 素数环PrimeRing [3*] 程序设计 程序分析 素数环PrimeRing [3*] 把1~N这N个整数摆成一个环,要求任意相邻两个数的和为素数。按字典序打印出以1开始的素数环 Input 一个整数N (<=10) Output 每行一个素数环。每个数之间用一个空格隔开。 无解输出 No Solution Sampl…...
mongodb 连接池配置
参考官方描述: 如果spring使用以下mongodb的配置,则默认是没有连接池的 spring:data:mongodb:host: 地址port: 27017database: 数据库名username: 账号password: 密码 每隔一两分钟没有去请求的话就会断开连接重连,每次都要等待5-10秒之间才…...
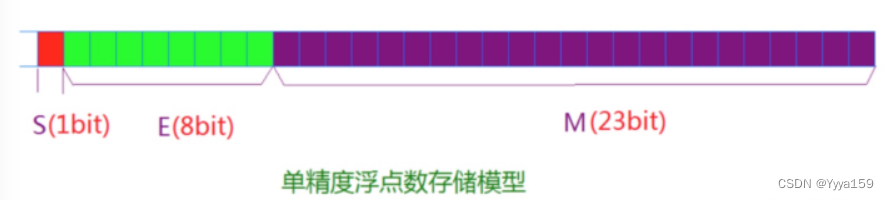
数据在内存中的存储(深度剖析)
目录 1.数据类型介绍 1.1类型分类 2.整形在内存中的存储 2.1原码,反码,补码 2.2大小端介绍 2.3练习 3.浮点型在内存中的存储 3.1浮点数存储规则 引入: 有正负的数据可以存放在有符号的变量中 只有正数的数据可以存放在无符号的变量…...
python 实现二叉搜索树的方法有哪些?
树的介绍 树不同于链表或哈希表,是一种非线性数据结构,树分为二叉树、二叉搜索树、B树、B树、红黑树等等。 树是一种数据结构,它是由n个有限节点组成的一个具有层次关系的集合。用图片来表示的话,可以看到它很像一棵倒挂着的树。…...

ORM概述
1_ORM概述[理解] 解释: 对象关系映射模型特点: 1.将类名,属性, 映射成数据库的表名和字段2.类的对象,会映射成为数据库表中的一行一行的数据 优缺点: 优点: 1.不再需要编写sql语句2.不再关心使用的是什么数据库了 缺点: 1.由于不是直接通过sql操作数据库,所以有性能损失 2_…...
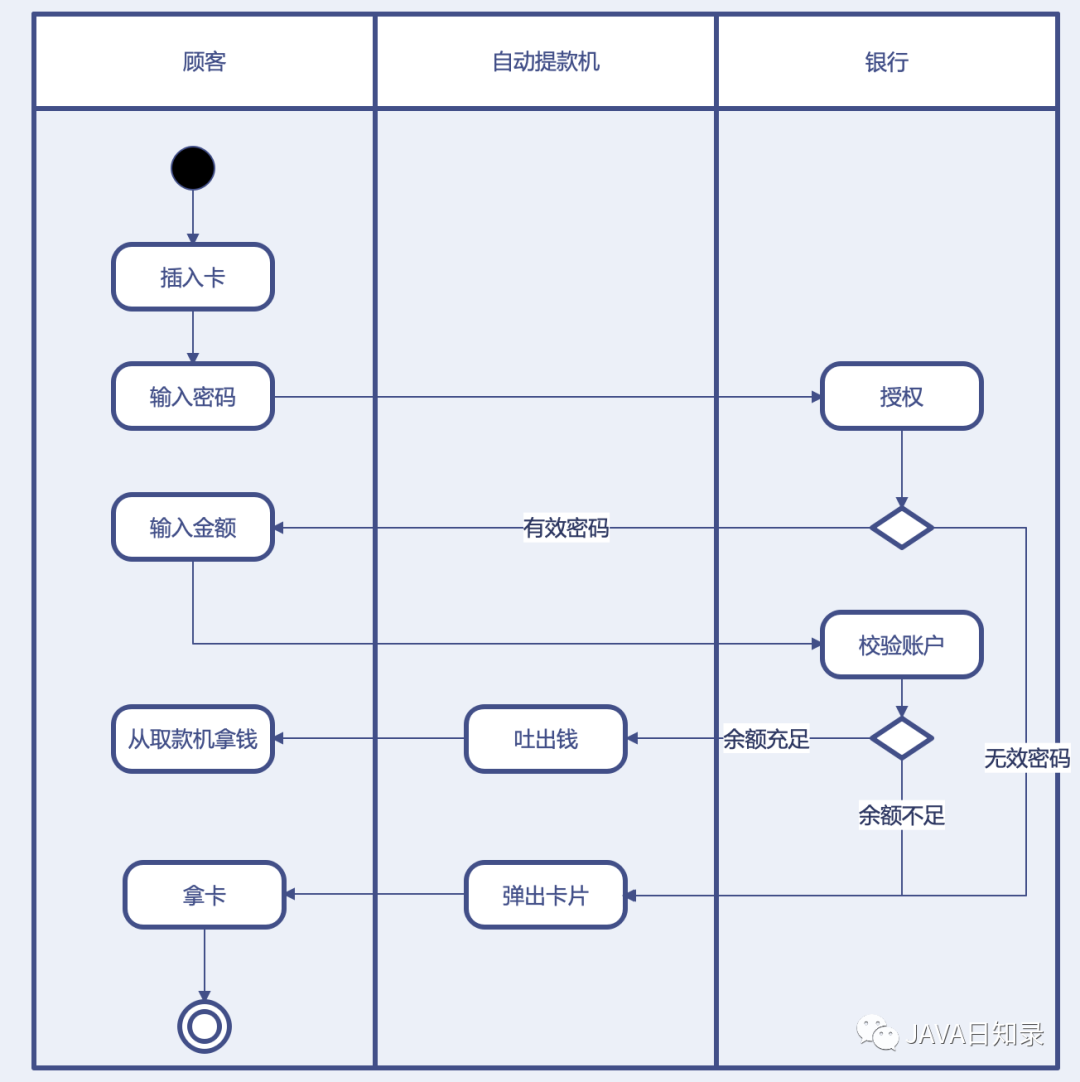
程序员必知必会7种UML图(类图、序列图、组件图、部署图、用例图、状态图和活动图)画法盘点
众所周知,软件开发是一个分阶段进行的过程。不同的开发阶段需要使用不同的模型图来描述业务场景和设计思路,在不同的阶段输出不同的设计文档也是必不可少的,例如,在需求分析阶段需要输出领域模型和业务模型,在架构阶段…...
基于asp的搜索引擎开发和实现
随着因特网的迅猛发展、WEB信息的增加,用户要在信息海洋里查找信息,就像大海捞针一样,搜索引擎技术恰好解决了这一难题。目前,搜索引擎系统可以分类三大类,分别是:目录式搜索引擎:以人工方式或半…...

代码随想录刷题-字符串-实现 strStr()
文章目录实现 strStr()习题暴力解法kmp 解法实现 strStr() 本节对应代码随想录中:代码随想录,讲解视频:帮你把KMP算法学个通透!(理论篇)_哔哩哔哩_bilibili、帮你把KMP算法学个通透!࿰…...

前端已死?金三银四?你收到offer了吗?
目录 一、前言 二、“唱衰” 三、不局限于框架、前端 四、打动面试官 五、正向加成 六、小结 一、前言 最近在脉脉、知乎等平台都有人在渲染前端从业人员的危机,甚至使用“前端已死”的字眼,颇有“语不惊人死不休”的意味,对老鸟来说&a…...

C生万物 | 十分钟带你学会位段相关知识
结构体相关知识可以先看看这篇文章 —— 链接 一、什么是位段 位段的声明和结构是类似的,有两个不同: 位段的成员必须是 int、unsigned int 或signed int位段的成员名后边有一个冒号和一个数字 在下面,我分别写了一个结构体和一个位段&…...
Spring Boot基础学习之(十):修改员工的信息
注意:spring boot专栏是一个新手项目,博文顺序则是功能实现的流程,如果有看不懂的内容可以到前面系列去了解。 本次项目所有能够使用的静态资源可以免费进行下载 静态资源 在本篇代码DAO层将通过Java文件去实现,在这里就不连接数…...

闭关十几天,我完成了我的毕业设计
个人简介 👀个人主页: 前端杂货铺 🙋♂️学习方向: 主攻前端方向,也会涉及到服务端(Node.js) 📃个人状态: 在校大学生一枚,已拿多个前端 offer(…...

认识rust的项目管理工具--cargo
cargo 提供了一系列的工具,从项目的建立、构建到测试、运行直至部署,为 Rust 项目的管理提供尽可能完整的手段。不过,我们无需再手动安装,之前安装 Rust 的时候(用rustup或者vscode加插件的方式安装)&#…...
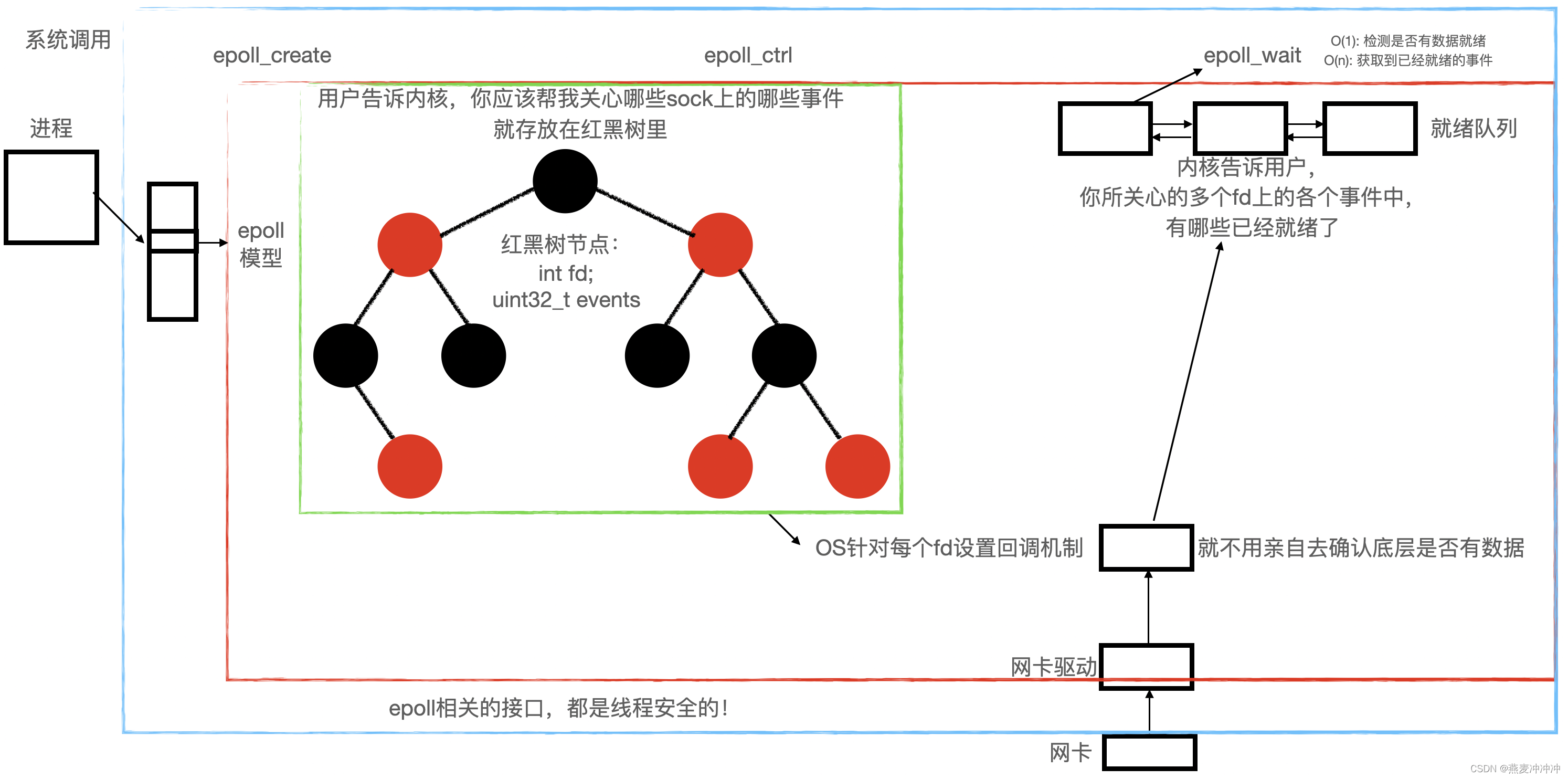
面试常问的Linux之 I/O 复用
I/O 复用 一、I/O的概念 在Linux系统中,I/O(输入/输出)指的是计算机系统的数据交换过程,包括从外部设备读取数据(输入)和将数据发送到外部设备(输出)。I/O操作是Linux系统中非常重要…...
MySQL-binlog+dump备份还原
目录 🍁binlog日志恢复 🍂binlog介绍 🍂Binlog的用途 🍂开启binary log功能 🍂配置binlog 🍁mysqldump 🍂数据库的导出 🍂数据库的导入 🍁mysqldumpbinlog 🦐…...
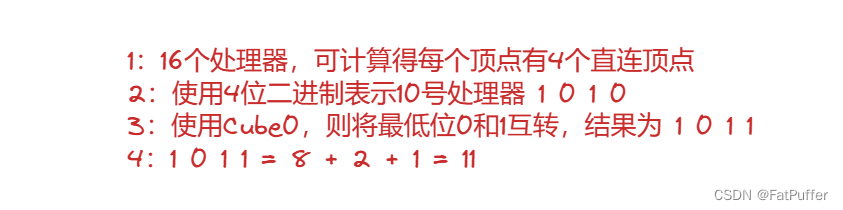
互联网络-单级互联网络
1.立方体单级网络 1.定义 立方体单级网络(cube)的名称来源于下图所示的三维立方体结构,如010只能连接到000、011、110,不能直接连接到对角线上的001、100、101、111。 2.例题 1.编号为0、1、2、3、4,…,15的16个处理器,用单级互联网络互联,用Cube0互联函数时,与第10…...
上海亚商投顾:沪指四连阳重回3300点 中字头个股再发力
上海亚商投顾前言:无惧大盘涨跌,解密龙虎榜资金,跟踪一线游资和机构资金动向,识别短期热点和强势个股。 市场情绪大小指数今日走势分化,沪指低开后震荡反弹,创业板指盘中跌超1%。中字头个股再度发力&#x…...

LeetCode:150. 逆波兰表达式求值—栈
🍎道阻且长,行则将至。🍓 🌻算法,不如说它是一种思考方式🍀算法专栏: 👉🏻123 一、🌱150. 逆波兰表达式求值 题目描述:给你一个字符串数组 token…...

C/C++每日一练(20230410) 二叉树专场(4)
目录 1. 二叉搜索树迭代器 🌟🌟🌟 2. 验证二叉搜索树 🌟🌟🌟 3. 不同的二叉搜索树 II 🌟🌟🌟 🌟 每日一练刷题专栏 🌟 Golang每日一练 专…...

如何快速部署FastGithub:终极GitHub加速配置指南
如何快速部署FastGithub:终极GitHub加速配置指南 【免费下载链接】FastGithub github定制版的dns服务,解析访问github最快的ip 项目地址: https://gitcode.com/gh_mirrors/fa/FastGithub FastGithub是一款专为开发者设计的智能DNS加速工具&#x…...

利用Taotoken用量看板精细化管理团队大模型API消费
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用Taotoken用量看板精细化管理团队大模型API消费 对于团队管理者而言,在引入大模型能力后,一个普遍存在的…...

ESP32 Arduino IDE 看门狗实战:从硬件看门狗到Task Watchdog Timer的配置与避坑指南
1. ESP32看门狗机制入门:为什么你的程序总在重启? 刚接触ESP32的开发者经常会遇到一个诡异现象:程序运行得好好的,突然就重启了。这很可能就是看门狗(Watchdog Timer)在作祟。我第一次用ESP32做物联网传感器…...

从无监督到半监督:利用scVI与scANVI在Python中实现单细胞数据的精准批次整合
1. 单细胞数据批次整合的挑战与解决方案 单细胞RNA测序技术(scRNA-seq)已经成为研究细胞异质性的重要工具。但在实际研究中,我们常常会遇到一个棘手的问题:不同实验批次之间的技术变异。这种批次效应就像是在显微镜镜头上蒙了一层…...

构建一个基于YOLOv8的打架检测系统,包括环境设置、数据准备、模型训练、评估和推理部署。Yolov8训练打架斗殴数据集
构建一个基于YOLOv8的打架检测系统,包括环境设置、数据准备、模型训练、评估和推理部署。Yolov8训练打架斗殴数据集 文章目录1. 环境设置2. 数据准备2.1 数据集结构2.2 类别映射3. 文件内容3.1 Config.py3.2 train.py3.3 detect_tools.py3.4 UIProgram/MainProgram.…...

使用Nodejs和Taotoken快速构建一个支持多模型切换的聊天服务
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Node.js和Taotoken快速构建一个支持多模型切换的聊天服务 基础教程类,面向全栈或后端开发者,教程将引导…...

如何快速为音乐库批量下载完美歌词?ZonyLrcToolsX 终极指南
如何快速为音乐库批量下载完美歌词?ZonyLrcToolsX 终极指南 【免费下载链接】ZonyLrcToolsX ZonyLrcToolsX 是一个能够方便地下载歌词的小软件。 项目地址: https://gitcode.com/gh_mirrors/zo/ZonyLrcToolsX 还在为音乐播放器缺少歌词而烦恼吗?是…...

移动Git客户端:Android上的完整版本控制解决方案
移动Git客户端:Android上的完整版本控制解决方案 【免费下载链接】MGit A Git client for Android. 项目地址: https://gitcode.com/gh_mirrors/mg/MGit 在移动开发日益普及的今天,开发者需要在不同场景下管理代码版本。移动Git客户端MGit为Andro…...

YOLOv7训练VisDrone数据集避坑指南:标签转换、类别映射与路径配置详解
YOLOv7实战:VisDrone数据集训练全流程精解与疑难排查 1. 理解VisDrone数据集特性与YOLO格式差异 VisDrone作为无人机视角下的目标检测基准数据集,其标注格式与YOLOv7的预期输入存在本质区别。原始标注文件(annotations/*.txt)采用…...
)
毕业设计:基于springboot的在线课程管理系统(源码)
4系统概要设计4.1概述本系统采用B/S结构(Browser/Server,浏览器/服务器结构)和基于Web服务两种模式,是一个适用于Internet环境下的模型结构。只要用户能连上Internet,便可以在任何时间、任何地点使用。系统工作原理图如图4-1所示:图4-1系统工作原理图4.2…...