OpenCV(14)-OpenCV4.0中文文档学习2(补充)
相机校准和3D重建
相机校准
标定
- findChessboardCorners() 它返回角点和阈值,如果成功找到所有角点,则返回 True。这些角落将按顺序放置(从左到右,从上到下)
- cornerSubPix()用以寻找图案,找到角点后也可以用其来提高它们的准确性
- drawChessboardCorners() 绘制图案
import numpy as np
import cv2 as cv
import glob# 终止标准
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 30, 0.001)# 准备对象点, 如 (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)
objp = np.zeros((6*7,3), np.float32)
objp[:,:2] = np.mgrid[0:7,0:6].T.reshape(-1,2)# 用于存储所有图像对象点与图像点的矩阵
objpoints = [] # 在真实世界中的 3d 点
imgpoints = [] # 在图像平面中的 2d 点images = glob.glob('*.jpg')for fname in images:img = cv.imread(fname)gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)# 找到棋盘上所有的角点ret, corners = cv.findChessboardCorners(gray, (7,6), None)# 如果找到了,便添加对象点和图像点(在细化后)if ret == True:objpoints.append(objp)corners2 = cv.cornerSubPix(gray,corners, (11,11), (-1,-1), criteria)imgpoints.append(corners)# 绘制角点cv.drawChessboardCorners(img, (7,6), corners2, ret)cv.imshow('img', img)cv.waitKey(500)cv.destroyAllWindows()
校准
- calibrateCamera()函数
ret, mtx, dist, rvecs, tvecs = cv.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
矫正
-
getOptimalNewCameraMatrix(mtx, dist, (w,h), 1, (w,h))根据自由缩放系数细化相机矩阵。
-
如果缩放参数 alpha = 0,这个函数将返回最小不必要像素的校正图像。所以它甚至可能会移除图像角落的一些像素。如果 alpha = 1,则所有像素都会保留一些额外的黑色图像。此函数还返回图像 ROI,可用于裁剪结果。
-
undistort(img, mtx, dist, None, newcameramtx) 调用这个函数并使用使用上面获得的 ROI 来裁剪结果
# 矫正
dst = cv.undistort(img, mtx, dist, None, newcameramtx)# 裁切图像
x, y, w, h = roi
dst = dst[y:y+h, x:x+w]
cv.imwrite('calibresult.png', dst)
- 重映射:首先,找到一个从畸变的图像到矫正过的图像的映射函数。然后使用重映射函数。
# 矫正
mapx, mapy = cv.initUndistortRectifyMap(mtx, dist, None, newcameramtx, (w,h), 5)
dst = cv.remap(img, mapx, mapy, cv.INTER_LINEAR)# 裁切图像
x, y, w, h = roi
dst = dst[y:y+h, x:x+w]
cv.imwrite('calibresult.png', dst)
姿势估计
- 可以绘制2D图像模拟3D效果
- 绘制坐标系、立方体等
线性几何
-
两张图使用极线匹配
-
左边的图像所有的极线都汇聚到右侧图像外的一点。那个汇聚点便是极点。

立体图像的深度图
-
一个场景点的深度是与相应图像点及其相机投影中心的距离差成反比的
-
创建视差图
import numpy as np
import cv2 as cv
from matplotlib import pyplot as pltimgL = cv.imread('tsukuba_l.png',0)
imgR = cv.imread('tsukuba_r.png',0)stereo = cv.StereoBM_create(numDisparities=16, blockSize=15)
disparity = stereo.compute(imgL,imgR)
plt.imshow(disparity,'gray')
plt.show()

K-Means聚类
- kmeans()函数进行数据聚类
- 输入参数:
- samples : 应该是 np.float32 数据类型,并且每个功能都应该放在一个列中。
- nclusters(K) : 结束时所需的集群数量
- criteria: 迭代终止标准。满足此条件时,算法迭代停止。实际上,这是一个有 3 个元素的 tuple。它们是
( type, max_iter, epsilon ):- 终止标准的类型。 它有 3 个标志如下:
- cv.TERM_CRITERIA_EPS - 如果达到指定的精度 epsilon,则停止算法迭代。
- cv.TERM_CRITERIA_MAX_ITER - 在指定的迭代次数 max_iter 之后停止算法。
- cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER - 当满足上述任何条件时停止迭代。
- max_iter - 一个指定最大迭代次数的整数。
- epsilon - 要求的精度
- 终止标准的类型。 它有 3 个标志如下:
- attempts : 用于指定使用不同初始标记执行算法的次数的标志。算法返回产生最佳紧凑性的标签。该紧凑性作为输出返回。
- flags : 该标志用于指定初始中心的采用方式。通常会使用两个标志:cv.KMEANS_PP_CENTERS 和 cv.KMEANS_RANDOM_CENTERS
- 输出参数:
- compactness : 每个点到其相应中心的平方距离之和。
- labels : 标签数组(与前一篇文章中的’代码’相同),其中每个元素都标记为’0’,‘1’…
- centers : 聚类中心数组
图像去噪
-
OpenCV 提供了这种技术的四种变体。
-
cv.fastNlMeansDenoising() - 适用于单个灰度图像
-
cv.fastNlMeansDenoisingColored() - 适用于彩色图像。
-
cv.fastNlMeansDenoisingMulti() - 适用于短时间内拍摄的图像序列(灰度图像)
-
cv.fastNlMeansDenoisingColoredMulti() - 与上述相同,但适用于彩色图像。
-
参数:
- h:参数决定滤波器强度。较高的 h 值可以更好地消除噪声,但也会删除图像的细节。
- hForColorComponents:与 h 相同,但仅适用于彩色图像。 (通常与 h 相同)
- templateWindowSize:应该是奇数。 (推荐 7)
- searchWindowSize:应该是奇数。 (推荐 21)
相关文章:
OpenCV(14)-OpenCV4.0中文文档学习2(补充)
相机校准和3D重建 相机校准 标定 findChessboardCorners() 它返回角点和阈值,如果成功找到所有角点,则返回 True。这些角落将按顺序放置(从左到右,从上到下)cornerSubPix()用以寻找图案,找到角点后也可以…...

八、express框架解析
文章目录 前言一、express 路由简介1、定义2、基础使用 二、express 获取参数1、获取请求报文参数2、获取路由参数 三、express 响应设置1、一般响应设置2、其他响应设置 四、express 防盗链五、express 路由模块化1、模块中代码如下:2、主文件中代码如下࿱…...
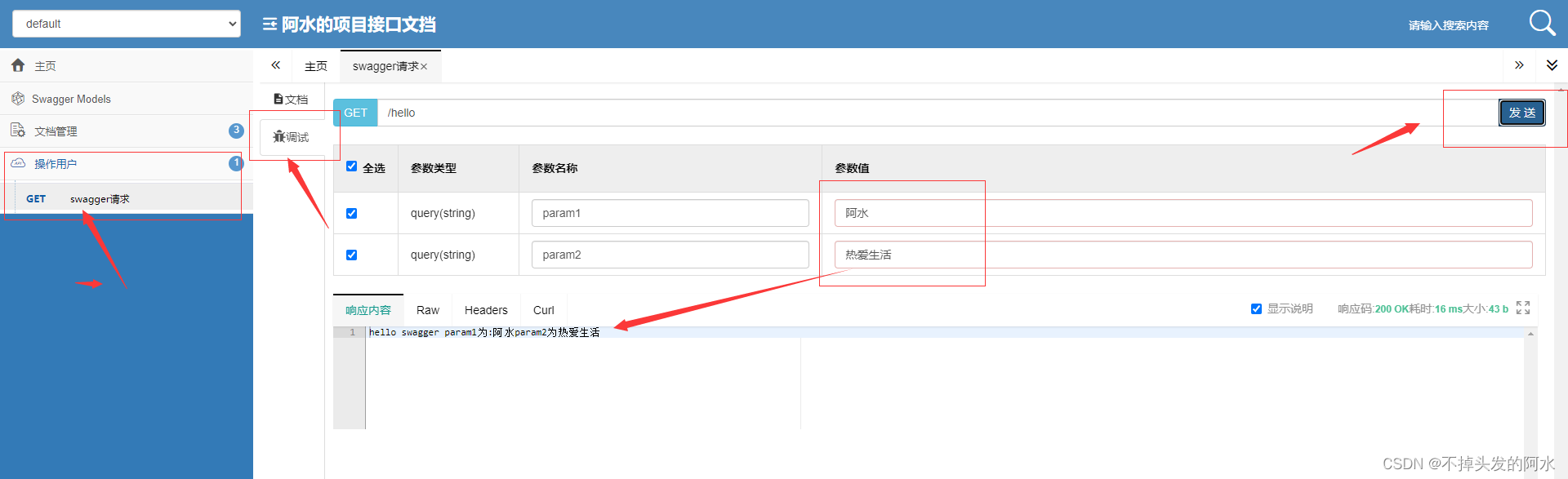
SpringBoot整合接口管理工具Swagger
Swagger Swagger简介 Springboot整合swagger Swagger 常用注解 一、Swagger简介 Swagger 是一系列 RESTful API 的工具,通过 Swagger 可以获得项目的⼀种交互式文档,客户端 SDK 的自动生成等功能。 Swagger 的目标是为 REST APIs 定义一个标…...

50+常用工具函数之xijs更新指南(v1.2.3)
xijs 是一款开箱即用的 js 业务工具库, 聚集于解决业务中遇到的常用的js函数问题, 帮助开发者更高效的进行业务开发. 目前已聚合了50常用工具函数, 接下来就和大家一起分享一下v1.2.3 版本的更新内容. 1. 添加将树结构转换成扁平数组方法 该模块主要由 EasyRo 贡献, 添加内容如…...

【DAY42】vue学习
const routes [ { path: ‘/foo’, component: Foo }, { path: ‘/bar’, component: Bar } ]定义路由的作用是什么 const routes 定义路由的作用是将每一个 URL 请求映射到一个组件,其中 path 表示请求的 URL,component 表示对应的组件。 通过 const…...

JavaScript小记——事件
HTML 事件是发生在 HTML 元素上的事情。 当在 HTML 页面中使用 JavaScript 时, JavaScript 可以触发这些事件。 Html事件 HTML 事件可以是浏览器行为,也可以是用户行为。 以下是 HTML 事件的实例: HTML 页面完成加载HTML input 字段改变…...
Windows逆向安全(一)之基础知识(八)
if else嵌套 这次来研究if else嵌套在汇编中的表现形式,本次以获取三个数中最大的数这个函数为例子,分析if else的汇编形式 求三个数中的最大值 首先贴上代码: #include "stdafx.h"int result0; int getMax(int i,int j,int k)…...

PyCharm+PyQt5+pyinstaller打包labelImg.exe
0 开头 labelImg是一款标注软件,作为一个开源项目,它的源码可以在github上找到。官方仓库地址为: https://github.com/heartexlabs/labelImg 小白安装时的最新版本编译出来的界面长这样: 之前在小白的博客里,也教过…...

JavaScript里实现继承的几种方式
JavaScript 中的继承可以通过以下几种方式来实现: 1、原型链继承:通过将子类的原型对象指向父类的实例来实现继承。这种方式的优点是实现简单,缺点是父类的私有属性和方法子类是不能访问的。 function Parent() {this.name parent;this.ag…...

前端:运用HTML+CSS+JavaScript实现迷宫游戏
最近感到挺无聊的,于是想到了大学期间关于栈的应用知识,于是就写了这篇博客! 运用HTML+CSS+JavaScript实现迷宫游戏 1. 运行结果2. 实现思路3. 参考代码1. 运行结果 前端:做个迷宫玩玩,不会迷路吧! 2. 实现思路 如果有一个迷宫,有入口,也有出口,那么怎样找到从入口到出…...
NoSQL数据库简介
NoSQL代表“不仅是SQL”,指的是一种数据库管理系统,旨在处理大量非结构化和半结构化数据。与使用具有预定义架构的表格格式的传统SQL数据库不同,NoSQL数据库是无模式的,并且允许灵活和动态的数据结构。 NoSQL数据库是必需的&…...

面试马铭泽
为什么报考这个岗位 首先,我对军人从小有崇敬之情,梦想着穿着庄严的军装,更对祖国有强烈的热爱之心。我的大舅是一名现役军人,老舅也曾服过兵役,从他们的谈吐以及教育中,让我对部队一直充满向往之情&#…...

查看AWS S3的目录
要查看AWS S3存储桶(Bucket)的目录,您可以通过AWS管理控制台或AWS CLI(命令行界面)来实现。 在AWS管理控制台中查看: 登录AWS管理控制台。选择S3服务。在S3存储桶列表中选择要查看的存储桶。在对象列表中…...
分布式系统概念和设计-操作系统中的支持和设计
分布式系统概念和设计 操作系统支持 中间件和底层操作系统的关系,操作系统如何满足中间件需求。 中间件需求:访问物理资源的效率和健壮性,多种资源管理策略的灵活性。 任何一个操作系统的目标都是提供一个在物理层(处理器,内存&a…...

【redis】bitmap、hyperloglog、GEO案例
【redis】bitmap、hyperloglog、GEO案例 文章目录 【redis】bitmap、hyperloglog、GEO案例前言一、面试题二、统计的类型聚合统计排序统计问题:思路 二值统计 0和1基数统计 三、hyperloglog1、名词理解UV 独立访客PV 页面浏览量DAU 日活跃用户MAU 月活跃度 2、看需求…...

第二章:集合与区间
1.集合 1.内容概述 1.了解集合的意义2.了解常见集合符号的含义3.云用常见的集合符号来表示集合之间的关系、元素与集合之间的关系2.基本概念 1.集合:把一些确定的对象看成一个整体就形成了一个集合。集合一般使用大写字母A、B、C…来表示2.元素:集合中每一个对象叫做这个集合…...

Mysql8.0版本安装
一,使用yum方式安装 1,配置mysql安装源: sudo rpm -Uvh https://dev.mysql.com/get/mysql80-community-release-el7-3.noarch.rpm2,安装mysql8.0: sudo yum --enablerepo=mysql80-community inst...

开放式耳机真的比封闭式强很多吗?推荐几款主流的开放式耳机
开放式耳机,顾名思义,就是通过骨头振动来传导声音的耳机。相比于传统耳机,它的声音传输更加开放,不会对耳膜造成压迫感,也不会对耳膜旁的内毛细胞造成损害。因此开放式耳机既是运动蓝牙耳机,又是音乐蓝牙…...
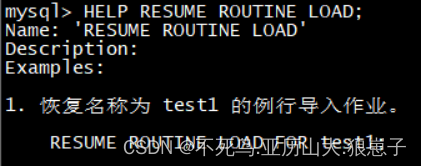
Doris(7):数据导入(Load)之Routine Load
例行导入功能为用户提供了义中自动从指定数据源进行数据导入的功能 1 适用场景 当前仅支持kafka系统进行例行导入。 2 使用限制 支持无认证的 Kafka 访问,以及通过 SSL 方式认证的 Kafka 集群。支持的消息格式为 csv 文本格式。每一个 message 为一行,…...
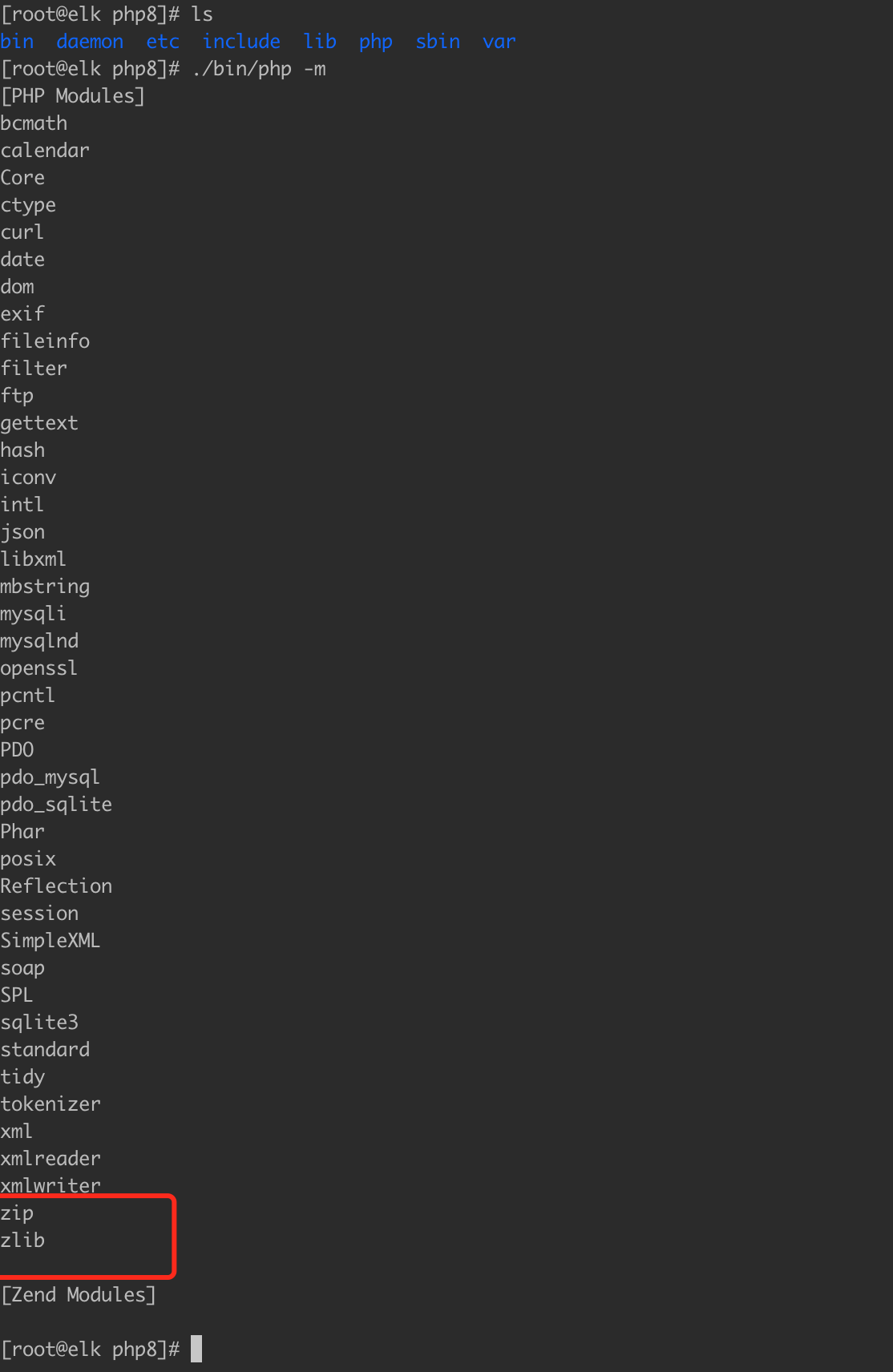
linux 安装php8.1 ZipArchive和libzip最新版扩展安装
1、概述 安装前咱们先看下我本地环境 [rootelk php8]# cat /etc/redhat-release Red Hat Enterprise Linux Server release 7.9 (Maipo) [rootelk php8]# [rootelk php8]# ./bin/php -v PHP 8.1.18 (cli) (built: Apr 17 2023 13:15:17) (NTS) Copyright (c) The PHP Group Z…...

ComfyUI-Manager 3步深度优化:构建稳定高效的AI工作流管理平台
ComfyUI-Manager 3步深度优化:构建稳定高效的AI工作流管理平台 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable vario…...

Verilog时钟分频实战:从偶数、奇数到小数分频的设计与实现
1. 项目概述:从零开始掌握Verilog时钟分频 在数字电路和FPGA设计中,时钟信号是驱动整个系统同步运行的“心跳”。然而,一个系统往往需要多种不同频率的时钟来驱动不同的模块,比如高速的处理器核心和低速的外设接口。直接使用多个外…...

codex features
这份列表是 OpenAI Codex 内部的功能开关,每个功能都处于特定的开发阶段。下面按稳定程度对这些功能进行了分类说明。 🟢 稳定版 (Stable) - 可以放心使用 这些功能已经过充分测试,适合在日常工作流中启用。功能名称功能说明apps支持 AI 直接…...

多脉冲重复频率解速度模糊:原理、仿真与MATLAB实现
1. 脉冲雷达的速度模糊问题 雷达测速的基本原理大家都懂,就是通过多普勒效应计算目标速度。但实际操作中会遇到一个头疼的问题——速度模糊。这就像用卷尺量身高,如果身高超过卷尺长度,就得把几段卷尺接起来量,但接缝处容易出错。…...

K210实战:三种高效部署kmodel模型至TF卡的进阶方案
1. K210模型部署的痛点与进阶方案概览 第一次用K210做图像识别项目时,最让我头疼的就是模型部署问题。每次修改模型都要反复插拔TF卡,调试过程像在玩打地鼠游戏。后来才发现,基础的拷贝粘贴只是入门操作,真正高效的部署方式能节省…...
)
尼泊尔语语音合成落地难?ElevenLabs官方未公开的3个语言模型限制(附2024年Q2实测延迟/错误率/重音支持对比表)
更多请点击: https://intelliparadigm.com 第一章:尼泊尔语语音合成落地难?ElevenLabs官方未公开的3个语言模型限制(附2024年Q2实测延迟/错误率/重音支持对比表) 尼泊尔语(नेपाली)作为IS…...
)
从CuteCom到代码:手把手教你用I.MX6ULL实现串口双向通信(附完整工程)
从CuteCom到代码:手把手教你用I.MX6ULL实现串口双向通信 在嵌入式开发中,串口通信是最基础也最关键的调试手段之一。无论是简单的日志输出,还是复杂的数据交互,串口都扮演着不可或缺的角色。本文将带你从零开始,在I.MX…...
Point Transformer V3 牙齿语义分割测试结果为0问题:完整调试与修复方案
Point Transformer V3 牙齿语义分割测试结果为0问题:完整调试与修复方案 摘要 Point Transformer V3(PTv3)是CVPR 2024发布的高效点云处理模型,在语义分割任务中表现出色。然而,在16类牙齿语义分割任务的测试阶段,模型输出全部为0的问题却常常困扰开发者。本文将从数据…...

告别apt install:手把手教你为Ubuntu 20.04上的ROS2 Humble手动编译安装serial串口库
从ROS1到ROS2:深入解析串口库手动编译安装的技术内幕 在机器人操作系统(ROS)的演进历程中,ROS2的诞生标志着整个生态系统的重大升级。对于刚从ROS1迁移到ROS2的中级开发者而言,最直观的冲击莫过于包管理方式的变化。当你习惯性地输入apt inst…...

物业临时工排班管理的技术破局:栎偲考勤神器的AI与离线方案详解
物业行业临时工排班管理长期面临三大技术痛点:人员流动性大导致班制匹配混乱、多场景打卡数据碎片化、中小企业部署成本高。作为专注考勤工具实测的博主,今天拆解栎偲考勤神器如何通过AI算法与轻量化技术,针对性解决物业临时工排班管理的核心…...