ROS第四十三节——定位
https://download.csdn.net/download/qq_45685327/87725276
1.新建launch文件
关于launch文件的实现,在amcl功能包下的example目录已经给出了示例,可以作为参考,具体实现:
roscd amcl
ls examples
gedit amcl_diff.launch该目录下会列出两个文件: amcl_diff.launch 和 amcl_omni.launch 文件,前者适用于差分移动机器人,后者适用于全向移动机器人,可以按需选择,此处参考前者,新建 launch 文件,复制 amcl_diff.launch 文件内容并修改如下:
nv04_amcl.launch
<launch><node pkg="amcl" type="amcl" name="amcl" output="screen"><!-- Publish scans from best pose at a max of 10 Hz --><param name="odom_model_type" value="diff"/><!-- 里程计模式为差分 --><param name="odom_alpha5" value="0.1"/><param name="transform_tolerance" value="0.2" /><param name="gui_publish_rate" value="10.0"/><param name="laser_max_beams" value="30"/><param name="min_particles" value="500"/><param name="max_particles" value="5000"/><param name="kld_err" value="0.05"/><param name="kld_z" value="0.99"/><param name="odom_alpha1" value="0.2"/><param name="odom_alpha2" value="0.2"/><!-- translation std dev, m --><param name="odom_alpha3" value="0.8"/><param name="odom_alpha4" value="0.2"/><param name="laser_z_hit" value="0.5"/><param name="laser_z_short" value="0.05"/><param name="laser_z_max" value="0.05"/><param name="laser_z_rand" value="0.5"/><param name="laser_sigma_hit" value="0.2"/><param name="laser_lambda_short" value="0.1"/><param name="laser_lambda_short" value="0.1"/><param name="laser_model_type" value="likelihood_field"/><!-- <param name="laser_model_type" value="beam"/> --><param name="laser_likelihood_max_dist" value="2.0"/><param name="update_min_d" value="0.2"/><param name="update_min_a" value="0.5"/><param name="odom_frame_id" value="odom"/><!-- 里程计坐标系 --><param name="base_frame_id" value="base_footprint"/><!-- 添加机器人基坐标系 --><param name="global_frame_id" value="map"/><!-- 添加地图坐标系 --><param name="resample_interval" value="1"/><param name="transform_tolerance" value="0.1"/><param name="recovery_alpha_slow" value="0.0"/><param name="recovery_alpha_fast" value="0.0"/></node>
</launch>
2.编写测试launch文件
amcl节点是不可以单独运行的,运行 amcl 节点之前,需要先加载全局地图,然后启动 rviz 显示定位结果,上述节点可以集成进launch文件,内容示例如下:
<launch><!-- 设置地图的配置文件 --><arg name="map" default="nav.yaml" /><!-- 运行地图服务器,并且加载设置的地图--><node name="map_server" pkg="map_server" type="map_server" args="$(find mycar_nav)/map/$(arg map)"/><!-- 启动AMCL节点 --><include file="$(find mycar_nav)/launch/amcl.launch" /><!-- 运行rviz --><node pkg="rviz" type="rviz" name="rviz"/>
</launch>3.执行
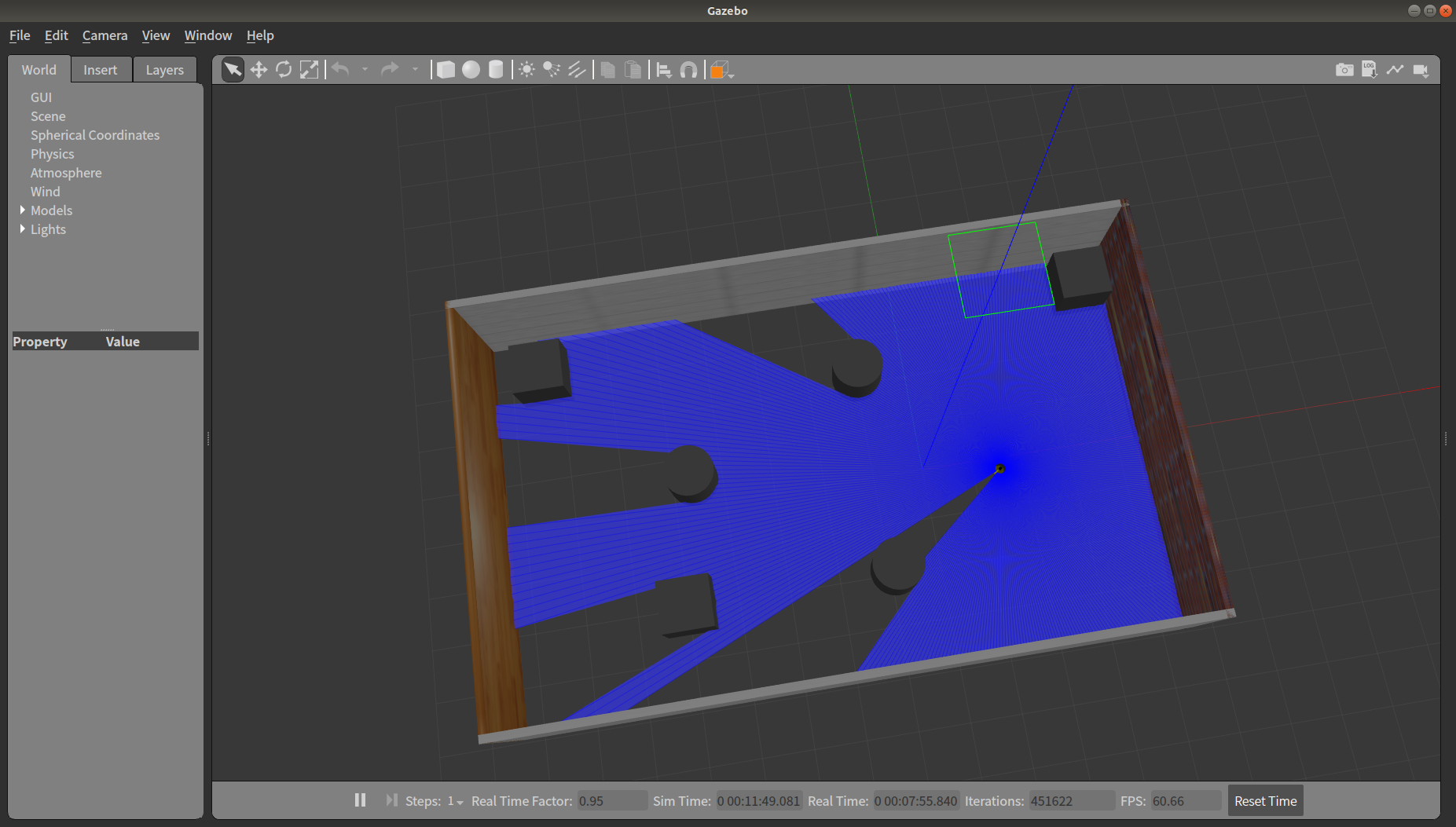
3.1先启动 Gazebo 仿真环境
roslaunch urdf02_gazebo deamo03_car_world.launch3.2启动键盘控制节点:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
3.3启动test_amcl.launch
上一步中集成地图服务、amcl 与 rviz 的 launch 文件;
roslaunch nav_demo test_amcl.launch3.4添加组件,显示效果
在启动的 rviz 中,添加RobotModel、Map组件,分别显示机器人模型与地图,添加 posearray 插件,设置topic为particlecloud来显示 amcl 预估的当前机器人的位姿,箭头越是密集,说明当前机器人处于此位置的概率越高;
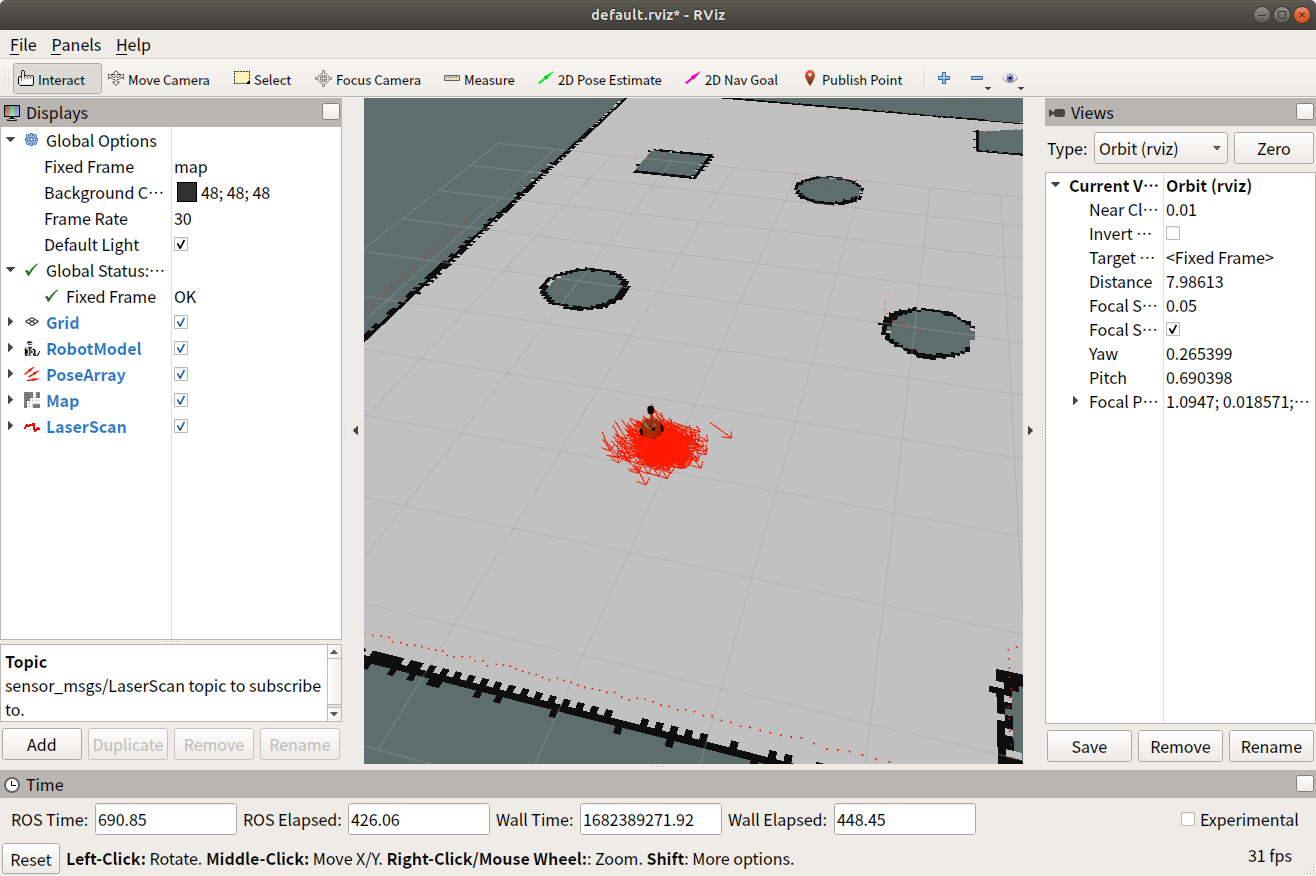
通过键盘控制机器人运动,会发现 posearray 也随之而改变。
相关文章:
ROS第四十三节——定位
https://download.csdn.net/download/qq_45685327/87725276 1.新建launch文件 关于launch文件的实现,在amcl功能包下的example目录已经给出了示例,可以作为参考,具体实现: roscd amcl ls examples gedit amcl_diff.launch 该目录下会列出两…...
2023年第二十届五一数学建模竞赛题目 C题详细思路
详细思路以及发布视频版,大家可以去观看,这里是对应的文字版,内容相差不多。 C题:“双碳”目标下低碳建筑研究 C题的问题设置其实是本次比赛最简单的一道,就是简单的综合评价预测模型。真正提升C题难度的其实是C题的…...

模块化编程原理示意图--CommonJS 模块编程--ES6 模块编程思路分析/图解--三种导出形式--全部代码示例
目录 模块化编程 基本介绍 模块化编程原理示意图 模块化编程分类 CommonJS 模块编程 介绍 应用实例 1. 需求说明 2. 思路分析/图解 3. 代码实现 function.js use.html use.js ES6 模块编程 介绍 需求说明 思路分析/图解 代码实现 common.js use_common.js …...
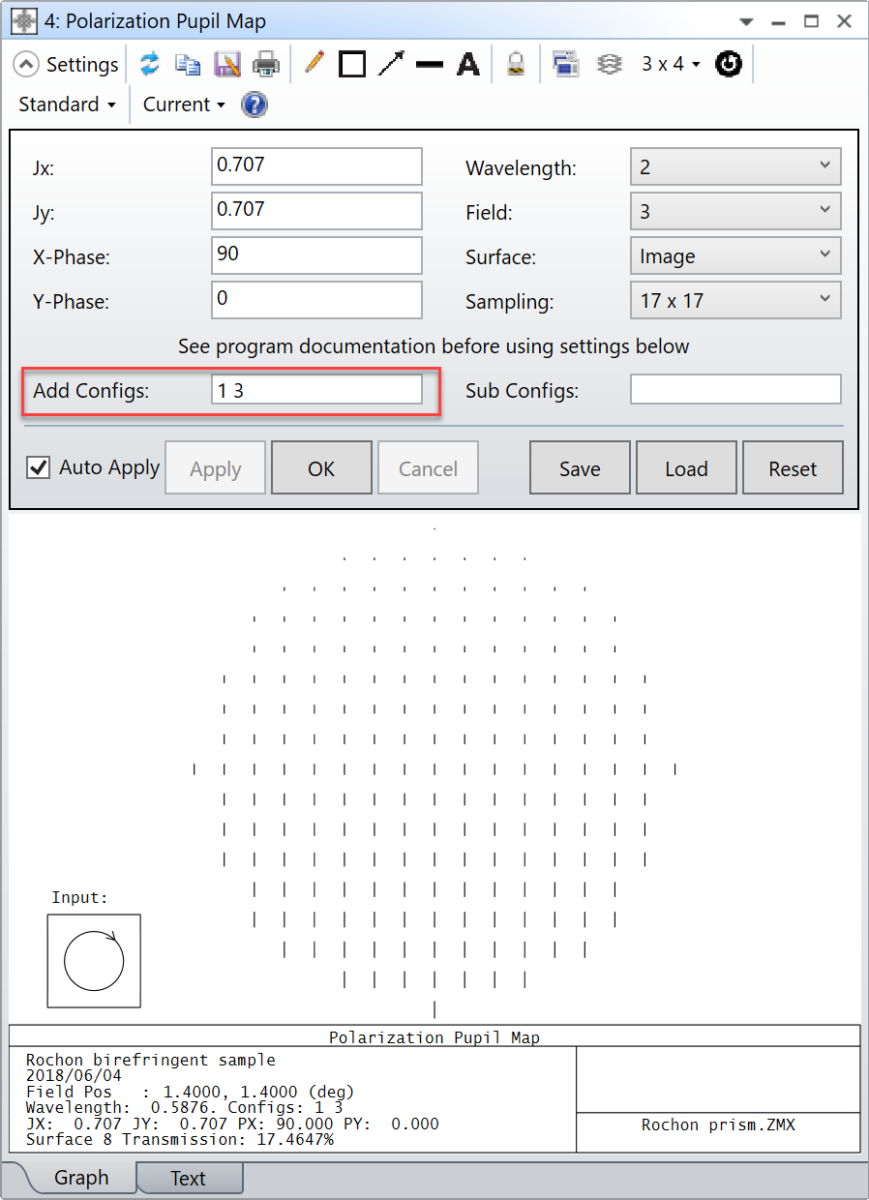
Ansys Zemax | 如何模拟双折射偏振器件
这篇文章介绍了什么是双折射现象、如何在OpticStudio中模拟双折射 (birefringence)、如何模拟双晶体的双折射偏振器以及如何计算偏振器的消光比。(联系我们获取文章附件) 什么是双折射现象 一般的光学材料都是均匀的各向同性的,也就是说无论光…...

Java关键字之:this
一、this关键字的使用 1、this可以用来修饰、调用:属性、方法、构造器 2、this修饰属性和方法 this理解为:当前对象 或 当前正在创建的对象 在类的方法中。我们可以使用“this.属性"或”this.方法“的方式。调用当前对象属性或者方法。但是&#…...
Linux中断)
嵌入式Linux驱动开发(九)Linux中断
1. Linux中断简介 1)中断号 linux内核中使用一个int变量表示中断号。 2)申请中断: 该函数可以自动激活中断,但是可能引起睡眠,所以需要小心使用。 int request_irq(unsigned int irq, //要申请中断的中断号irq_ha…...
数据库系统-并发控制
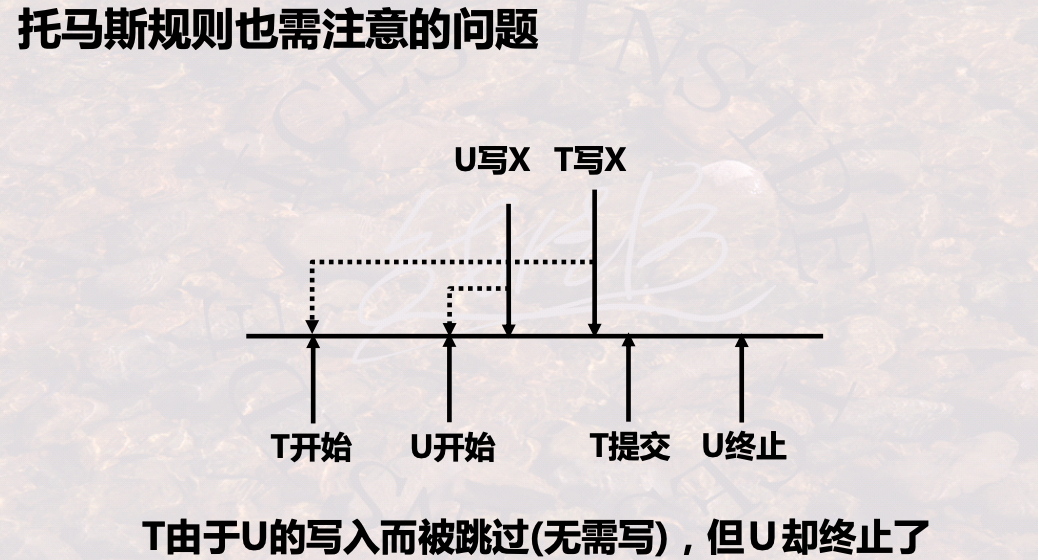
文章目录 一、为什么要并发控制1.2 并发控制解决的问题1.2.1 脏读1.2.2 幻读1.2.3 不可重复读1.2.4 数据丢失问题 二、事务调度及可串行性2.1 事务2.1.1 事务的宏观2.1.2 事务的微观2.1.3 事务的特性 ACID 2.2 事务调度与可串行性2.3 冲突可串行化判定 三、基于封锁的并发控制方…...

Java8 教程_编程入门自学教程_菜鸟教程-免费教程分享
教程简介 Java 8 (又称为 jdk 1.8) 是 Java 语言开发的一个主要版本。 Java 8 是oracle公司于2014年3月发布,可以看成是自Java 5 以来最具革命性的版本。Java 8为Java语言、编译器、类库、开发工具与JVM带来了大量新特性。 Java 8入门教程 - 从简单的步骤了解Java…...
从零开始学架构——高可用存储架构
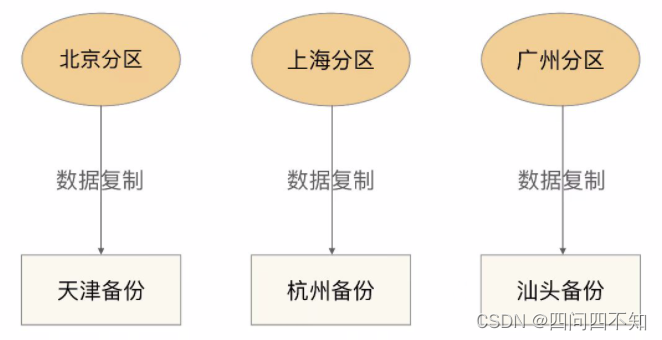
双机架构 存储高可用方案的本质都是通过将数据复制到多个存储设备,通过数据冗余的方式来实现高可用,其复杂性主要体现在如何应对复制延迟和中断导致的数据不一致问题。因此,对任何一个高可用存储方案,我们需要从以下几个方面去进…...

连ChatGPT都不懂的五一调休,到底怎么来的?
今天是周几? 你上了几天班了? 还要上几天班放假? 五一啥安排? 出行的票抢到了吗? 调休到底是谁发明的?! 五一劳动节是要劳动吗? 为什么昨天是周一,今天还是周一&a…...

AES工作流程
工作流程 模式 1:加密 ⚫ 复位EN 重置AES模块 ⚫ 设置模式寄存器mode[1:0]00,设置流数据处理模式寄存器CHMOD[1:0] ⚫ 写AES_KEYRx寄存器,CTR和CBC模式下写AES_IVRx寄存器 ⚫ 写EN1,使能AES ⚫ 写AES_DINR 寄存器4次 ⚫ 等待CCF标…...
C++11
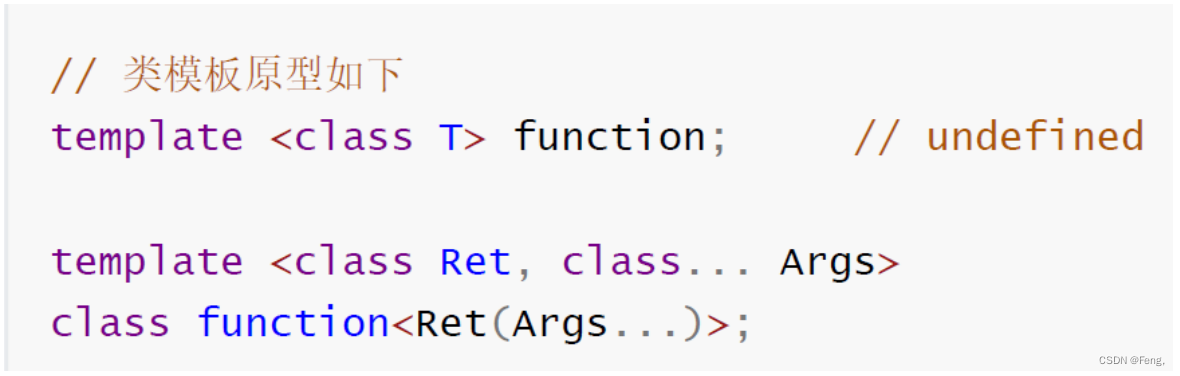
C11 统一的列表初始化 在介绍这里的列表初始化之前,首先我认为这是一个比较鸡肋的功能特性,而且使用起来会和之前C98时有些区别。 // 首先可以定义普通的内置类型的变量int x1 1;int x2 { 1 };int x3{ 1 }; // 这样看起来着实有些怪int arry1[] { 1,…...

ubuntu18.04 配置zlmediakit 支持ffmpeg转码记录
1、zlmediakt 默认不支持ffmepg转码,需要在根目录下的CamkeLists.txt里面option(ENABLE_FFMPEG "Enable FFmpeg" OFF) 将OFF改成ON, 删除原有的build目录,sudo mkdir build. cd build,cmake .. 这样在编译生成文件夹release/linux/debug/生…...

H68K配置路由功能
系统环境Armbian ubuntu系统 参考 如何使用Debian/Ubuntu等Linux做软路由(物理机版本,非虚拟机容器版) - 知乎 https://zhuanlan.zhihu.com/p/587068225 按照他操作的结果,就是只有一个网卡正常 最后一顿操作就出现了我这么个配置 更新源…...
*2.5 迭代法的收敛阶与加速收敛方法
学习目标: 了解迭代法的基本概念和原理。学习者需要理解迭代法的基本概念和原理,包括迭代过程、迭代格式、收敛性等基本概念。 熟练掌握迭代法的收敛阶和收敛速度。学习者需要了解迭代法的收敛阶和收敛速度,掌握如何计算迭代法的收敛阶和收敛…...

仪表板展示 | X-lab开放实验室GitHub开源项目洞察大屏
背景介绍 X-lab开放实验室是一个开源软件产业开放式创新的共同体,由来自国内外著名高校、创业公司、部分互联网与IT企业的专家学者与工程师所构成,目前已在包括开源治理标准制定、开源社区行为度量与分析、开源社区流程自动化、开源全域数据治理与洞察等…...
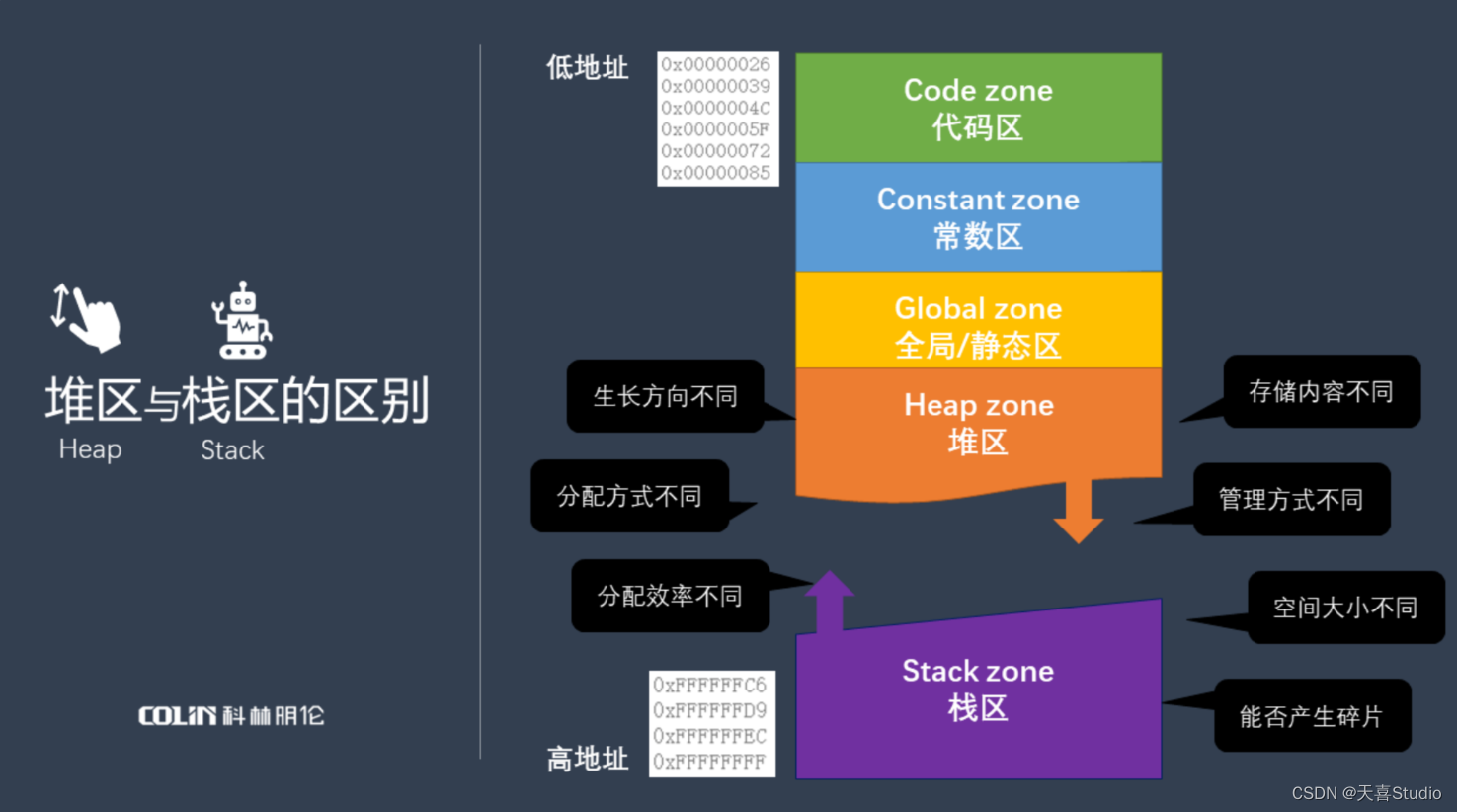
【c语言】五大内存区域 | 堆区详解
创作不易,本篇文章如果帮助到了你,还请点赞支持一下♡>𖥦<)!! 主页专栏有更多知识,如有疑问欢迎大家指正讨论,共同进步! 给大家跳段街舞感谢支持!ጿ ኈ ቼ ዽ ጿ ኈ ቼ ዽ ጿ ኈ ቼ ዽ ጿ…...
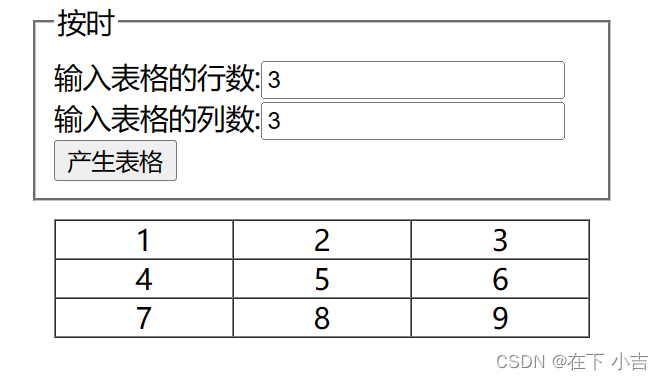
【JavaScript】动态表格
🎊专栏【 前端易错合集】 🍔喜欢的诗句:更喜岷山千里雪 三军过后尽开颜。 🎆音乐分享【如愿】 大一同学小吉,欢迎并且感谢大家指出我的问题🥰 🍔介绍 就是在输入框中输入数字后,再按…...
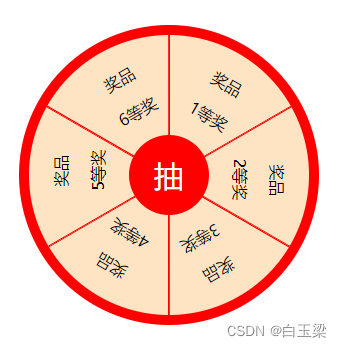
Css如何优雅的实现抽奖转盘
如图,抽奖转盘,可以拆分为几部分: 1.底部大圆; 2.中间小圆; 3.扇形区; 4.扇形内部奖品区; 5.抽奖按钮; 6.点击抽奖按钮时旋转动效及逻辑; 这其中,扇形区&am…...

在Java的小问题
问题1:如何在Java中创建一个对象? 解决方法: 在Java中,要创建一个对象,需要以下步骤: 创建一个类,定义对象的属性和行为。在类中定义一个构造函数,用于初始化对象的属性。在程序中…...

Textractor:3分钟掌握游戏文本提取,轻松跨越语言障碍!
Textractor:3分钟掌握游戏文本提取,轻松跨越语言障碍! 【免费下载链接】Textractor Extracts text from video games and visual novels. Highly extensible. 项目地址: https://gitcode.com/gh_mirrors/te/Textractor 还在为看不懂日…...

Auto.js开发环境搭建:用雷电模拟器替代真机,解决局域网IP不在同一网段的问题
Auto.js开发环境搭建:雷电模拟器网络架构深度解析与实战指南 当开发者手头没有备用安卓设备,或者真机与电脑的Wi-Fi连接频繁断开时,安卓模拟器成为了Auto.js脚本测试的救星。但模拟器的网络配置往往暗藏玄机——为什么雷电模拟器显示172.16.x…...

Ubuntu 22.04升级后,Chrome总提示‘连接中断’?别急着重装,试试检查这个代理设置
Ubuntu 22.04升级后Chrome连接中断的深度排查指南 最近不少Ubuntu 22.04用户在系统升级后遇到了一个令人困扰的问题——Chrome浏览器频繁提示"连接中断"。这个问题看似简单,实则可能隐藏着系统级网络配置变更的深层原因。本文将带你从多个维度全面排查&am…...

芯片HAST测试:通电工作下如何精准模拟极端环境挑战?
为了确保产品在高温、高湿等恶劣条件下仍能正常工作,HAST(Highly Accelerated Stress Test)测试成为不可或缺的一部分。本文将深入解析HAST测试,并探讨如何在通电工作状态下进行精准模拟,以应对极端环境挑战。什么是HA…...

3步彻底解决Windows程序启动失败:VisualCppRedist AIO终极修复指南
3步彻底解决Windows程序启动失败:VisualCppRedist AIO终极修复指南 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否遇到过新安装的软件无法启动…...

C51外部代码空间读取技术:CBYTE/CWORD宏详解
1. C51外部代码空间读取技术解析在8051单片机开发中,经常需要从外部程序存储器(Code Space)读取数据,这是嵌入式系统开发中的一项基础但关键的操作。许多开发者在使用Keil C51工具链时,会遇到如何正确读取外部程序存储器的问题。本文将深入解…...

基于Arduino与V-USB的红外转USB键盘接收器设计与实现
1. 项目概述:从游戏抢答器到通用输入设备的蜕变几年前,我在一个教育科技展会上看到了那种用于课堂抢答的无线按钮系统,一套动辄上千元的价格让我这个喜欢折腾硬件的玩家直摇头。当时我就在想,这玩意儿的核心不就是个红外发射接收加…...

强化学习入门:用Python实现Q-Learning算法
在软件测试领域,随着AI技术的不断渗透,掌握强化学习相关知识,能够帮助测试从业者更好地理解智能测试工具的底层逻辑,甚至开发出更高效的自动化测试方案。Q-Learning作为强化学习的经典入门算法,以其简洁的原理和广泛的…...
)
别再用时间机器了!用macOS恢复模式重装系统,保姆级图文教程(含抹盘避坑指南)
别再用时间机器了!用macOS恢复模式重装系统,保姆级图文教程(含抹盘避坑指南) 当你发现Mac运行速度明显变慢,或者准备转手出售设备时,彻底重装系统往往是最有效的解决方案。许多用户对macOS恢复模式存在本能…...
)
定点乘法避坑指南:做数字信号处理时,你的精度是怎么丢的?(附MATLAB/Python验证脚本)
定点乘法避坑指南:数字信号处理中的精度保卫战 在数字信号处理的世界里,定点乘法就像一位沉默的守护者——当它正常工作时,你几乎感受不到它的存在;但当它出错时,整个系统可能瞬间崩溃。想象一下这样的场景:…...