ORBBEC(奥比中光)AstraPro相机在ROS2下的标定与D2C(标定与配准)
文章目录
- 1.rgb、depth相机标定矫正
- 1.1.标定rgb相机
- 1.2.标定depth相机
- 1.3.rgb、depth相机一起标定(效果重复了,但是推荐使用)
- 1.4.取得标定结果
- 1.4.1.得到的标定结果的意义
- 1.5.IR、RGB相机分别应用标定结果
- 1.5.1.openCV应用标定结果
- 1.5.2.ros2工程应用标定结果
- 2.rgb、depth相机配准
- 2.1.求外参(R、T矩阵)
- 2.2.求两个相机之间的R、T矩阵
- 2.3.进行D2C操作
- 3.题外话
相机自带的D2C效果不好,颜色和点云没有很好地匹配上,自己按照下面的介绍手动匹配一下。
1.rgb、depth相机标定矫正
在下载来的sdk,里面没有标定的文件:ost.yaml.
需要自己进行标定、生成。
我所使用的相机型号是Astra_pro,它是一个单目结构光相机,有一个RGB摄像头+一个IR摄像头。实际上算是一个双目相机(rgb+ir)。【奥比中光Astra深度传感器工作原理】
在ros2(humble)中,需要先安装相机标定套件:
sudo apt install ros-humble-camera-*sudo apt install ros-humble-launch-testing-ament-cmake
在我的系统中,可以分别对这两个进行相机进行标定
在标定时,具体的参数(相机、话题、格子数等等)要根据你实际的情况进行填写。
1.1.标定rgb相机
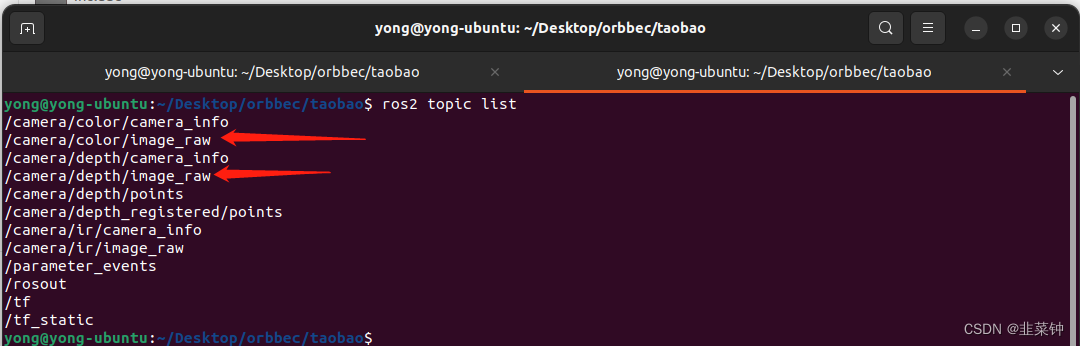
执行以下命令
ros2 run camera_calibration cameracalibrator --size 6x7 --square 0.015 --no-service-check image:=/camera/color/image_raw camera:=/camera/color
1.2.标定depth相机
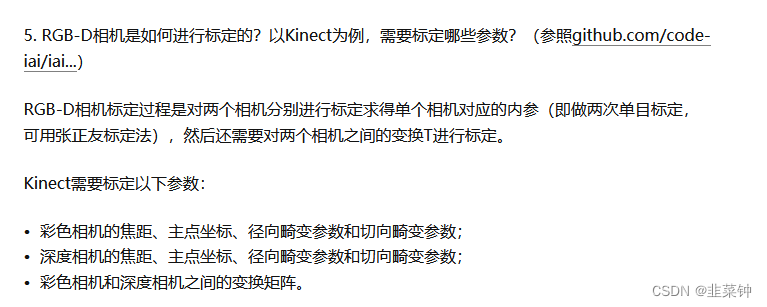
深度摄像头看起来和RGB摄像头差别很大,实际上有很多相似之处。就Kinect而言,其通过一个红外散斑发射器发射红外光束,光束碰到障碍物后反射回深度摄像头,然后通过返回散斑之间的几何关系计算距离。其实,Kinect的深度摄像头就是一个装了滤波片的普通摄像头,只对红外光成像的摄像头(可以这么认为)。因此要对其标定,只需用红外光源照射物体即可,LED红外光源在淘宝上就20元一个。还有一点必须注意,在拍摄红外照片时,要用黑胶带(或其他东西)将Kinect的红外发射器完全挡住,否则其发出的散斑会在红外照片中产生很多亮点,不利于棋盘角点的检测。
————————————————
原文链接:https://blog.csdn.net/aichipmunk/article/details/9264703
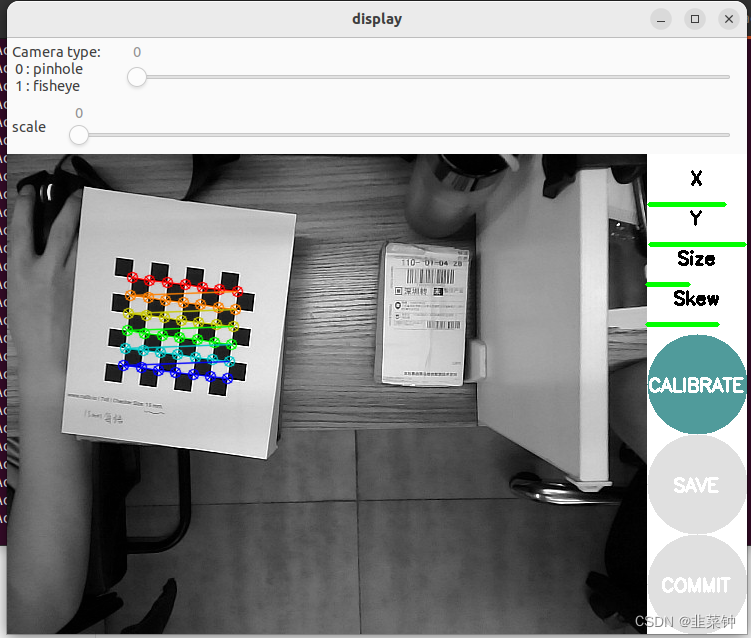
我这里就偷懒了,直接用自带的红外散斑发射器来标定。追求准确的同学,最好还是按照上面说的遮住红外发射器+买一个红外光源。
ros2 run camera_calibration cameracalibrator --size 6x7 --square 0.015 --no-service-check image:=/camera/ir/image_raw camera:=/camera/ir
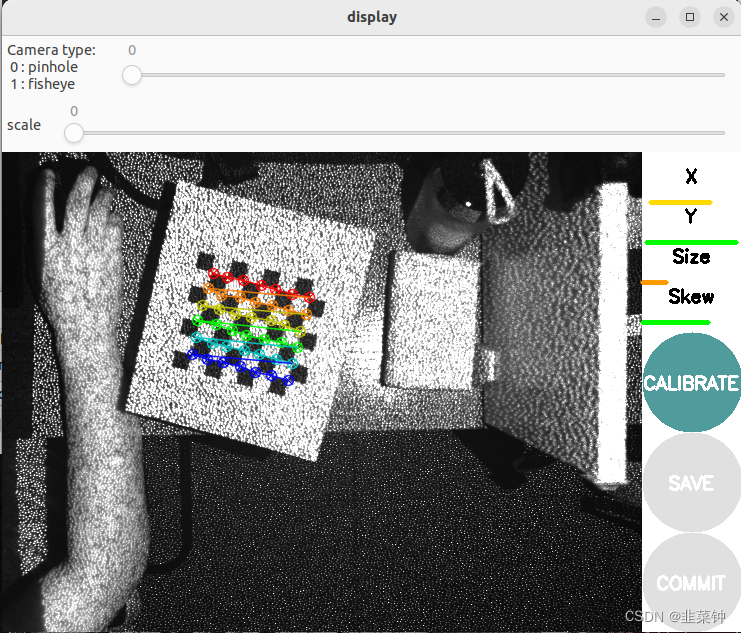
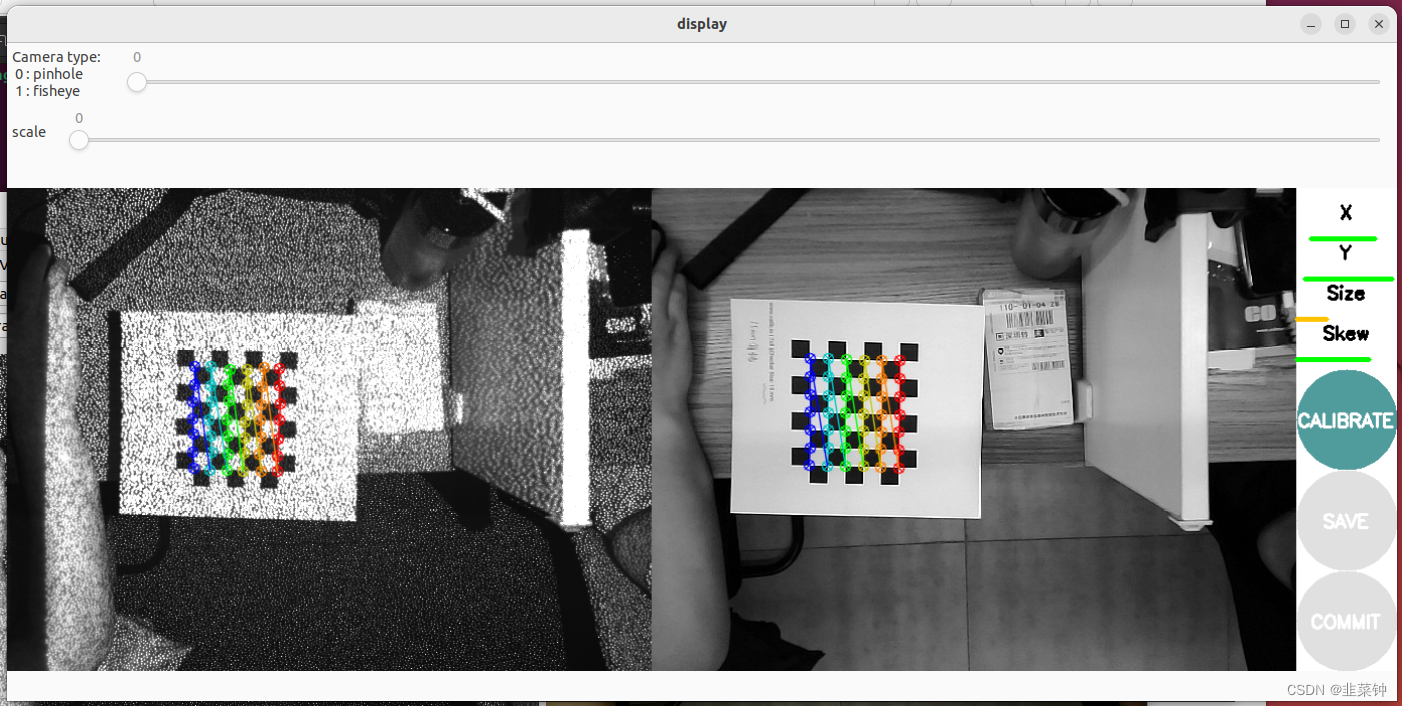
1.3.rgb、depth相机一起标定(效果重复了,但是推荐使用)
假如已经进行了上面rgb、depth相机的分别标定,这一步其实没必要进行,效果是一样的。
但是这个一起标定的话,有个好处:在后面计算外参时,可以直接拿到同一时刻两个相机分别拍到的图像。
【ROS下采用camera_calibration进行双目相机标定】
ros2 run camera_calibration cameracalibrator --size 6x7 --square 0.015 --approximate 0.1 --no-service-check left:=/camera/ir/image_raw left_camera:=/camera/ir right:=/camera/color/image_raw right_camera:=/camera/color
1.4.取得标定结果
参考上面提到的文章进行操作后,分别可以在/tmp目录下得到标定后的数据。
 无论是用camera_calibration进行单目标定和双目标定,貌似没有本质的区别,都是分别得到两个相机的内参。
无论是用camera_calibration进行单目标定和双目标定,貌似没有本质的区别,都是分别得到两个相机的内参。
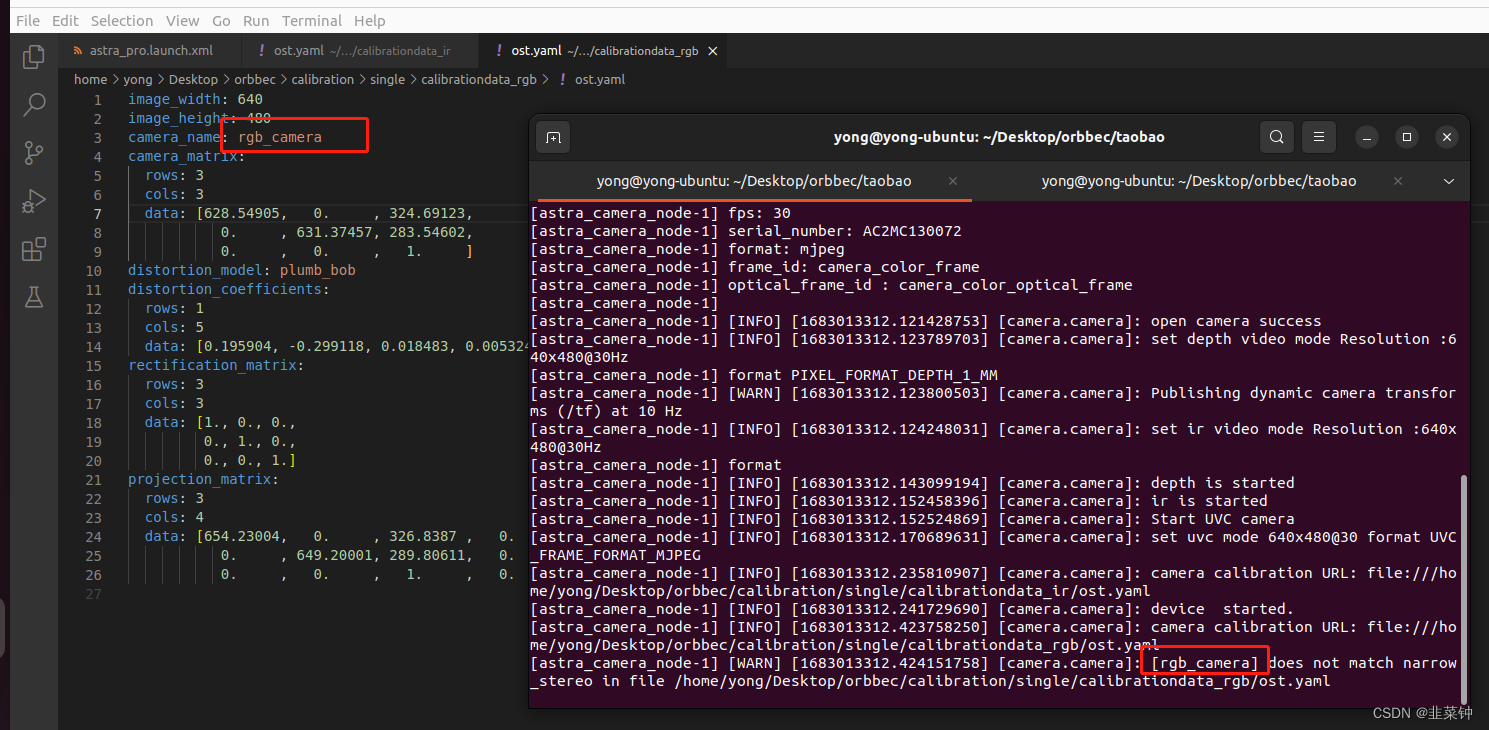
得到的相机内参入下图所示:
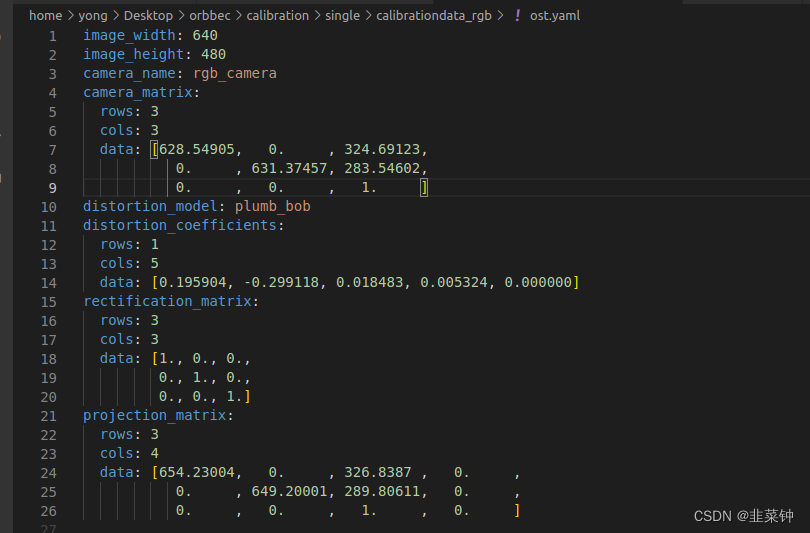
以上图为例,可以知道相机的内参fx=628.54905,fy=631.37457;这是说相机镜头的焦距为628.54905mm吗?
不是,这个是以像素为单位的,镜头的焦距为628.54905像素。那1像素代表多少mm呢(像元尺寸)?
这个要看相机感光芯片的尺寸及芯片的分辨率。假设感光芯片尺寸为WH(单位mm),分辨率为UV,那么像元尺寸为[W/U, H/V).
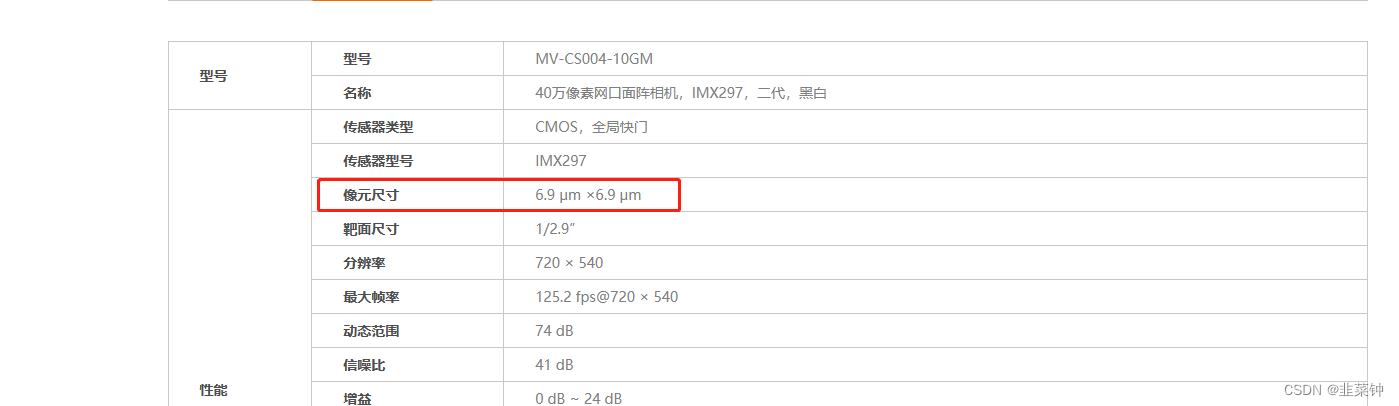 以上面的海康威视相机为例,假如我标定时使用的是这个相机(像元尺寸6.9um),然后得到的内参为fx=628.54905,fy=631.37457,那么,通过标定得知的镜头焦距:f=628.54905 * 6.9 um=4336.988445um=4.3mm。也就是说这个镜头大概是4.3mm的镜头。
以上面的海康威视相机为例,假如我标定时使用的是这个相机(像元尺寸6.9um),然后得到的内参为fx=628.54905,fy=631.37457,那么,通过标定得知的镜头焦距:f=628.54905 * 6.9 um=4336.988445um=4.3mm。也就是说这个镜头大概是4.3mm的镜头。
关于靶面、像元的介绍,可以看看这里:【相机和镜头选型需要注意哪些问题】、【相机靶面尺寸详解+工业相机选型】
1.4.1.得到的标定结果的意义
各标定参数的意义:
image_width、image_height代表图片的长宽
camera_name为摄像头名
camera_matrix规定了摄像头的内部参数矩阵
distortion_model指定了畸变模型
distortion_coefficients指定畸变模型的系数
rectification_matrix为矫正矩阵,一般为单位阵
projection_matrix为外部世界坐标到像平面的投影矩阵
也可以看看这个
【相机内参标定究竟标了什么?相机内参外参保姆级教程】
1.5.IR、RGB相机分别应用标定结果
得到标定结果后,有两种方法应用标定结果。
1.5.1.openCV应用标定结果
假如需要自己进行相机的画面矫正,可以使用opencv来进行。opencv只用到上面的camera_matrix、distortion_coefficients这两组数据
【opencv畸变校正的两种方法】
1.5.2.ros2工程应用标定结果
我这里可以直接修改卖家提供的源码里面的launch.xml文件的内容,让其加载标定结果。
设置好文件路径之后,出现 “Invalid camera calibration URL”的解决办法
要加上file://前缀,格式如下:
 假如出现 does not match narrow_stereo in时
假如出现 does not match narrow_stereo in时
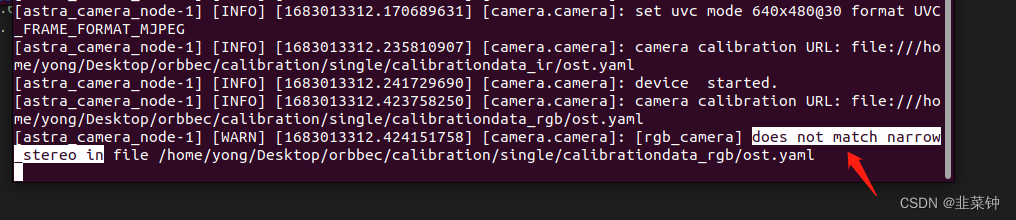 将ost.yaml里面相机的名字改成和报错的一致:
将ost.yaml里面相机的名字改成和报错的一致:
 由于AstraPro的rgb、ir镜头的畸变不明显,标定校准后,畸变的校准效果也不明显,这里就不贴对比图上来了。
由于AstraPro的rgb、ir镜头的畸变不明显,标定校准后,畸变的校准效果也不明显,这里就不贴对比图上来了。
2.rgb、depth相机配准
两个相机都标定完之后,就需要进行配准,也就是要得到从ir图到rgb图的映射(旋转矩阵R、平移矩阵T),从而得到对应深度点的颜色值。
【视觉SLAM十四讲(第二版)第5讲习题解答】
根据【Kinect深度图与RGB摄像头的标定与配准】里面分析到的,要求RT,就需要先求出外参。
2.1.求外参(R、T矩阵)
从【Opencv——相机标定】的介绍可以看到,opencv的函数calibrateCamera在根据若干组棋盘格点坐标,计算得到相机内参时,也可以得到每张图片的外参。但是我们目前是用ros的camera_calibration得到的相机内参(虽然内部也是opencv,但是camera_calibration没有给我们保存外参),所以不能够直接得到可用的外参。
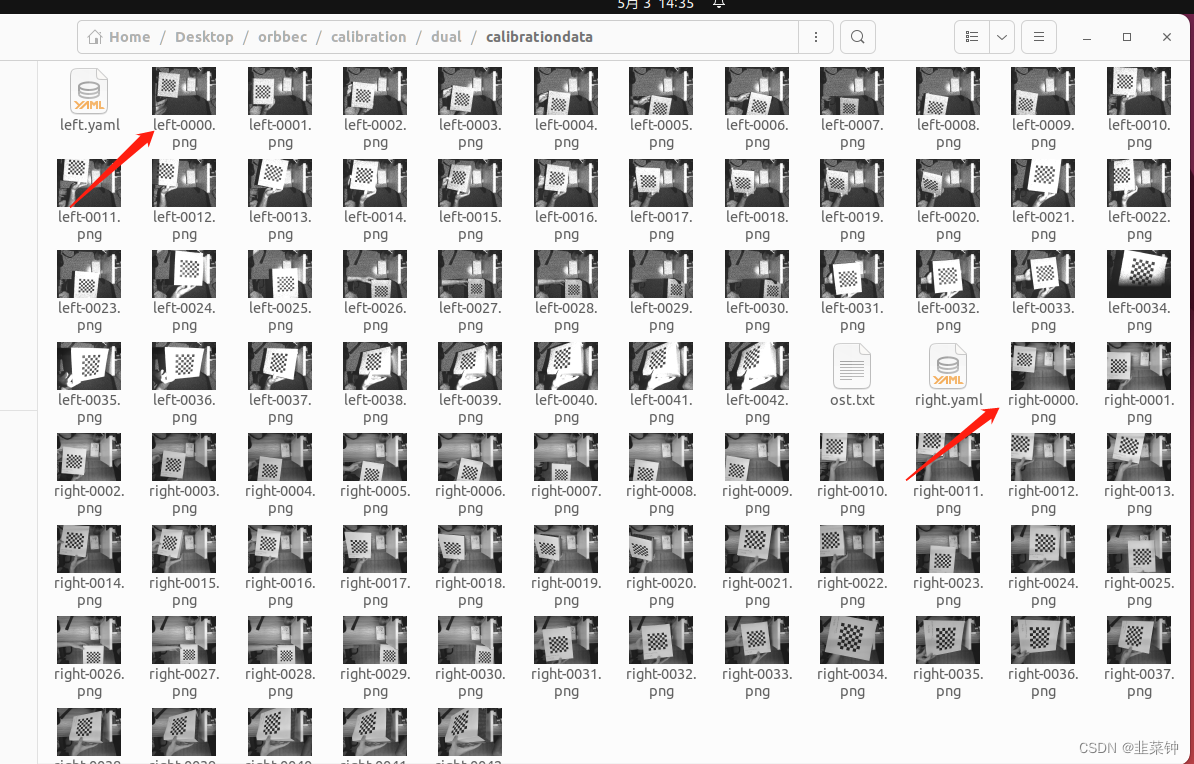
但是,我们可以从前面双目标定得到的结果中选取同一时刻拍摄的两张图片(一张是rgb相机的,一张是ir相机的)
 然后按照【OPENCV已知内参求外参】、【OPENCV标定外参】,利用上面的两张图片+各自相机的内参,分别算出每个相机的外参,主要代码如下:
然后按照【OPENCV已知内参求外参】、【OPENCV标定外参】,利用上面的两张图片+各自相机的内参,分别算出每个相机的外参,主要代码如下:
#include <opencv2/opencv.hpp>
#include <opencv2/calib3d.hpp>using namespace std;
using namespace cv;// 根据已知的信息计算外参
int calcExtrinsics(string fileName, Mat cameraMatrix, Mat distCoeffs, Size board_size, double rectWidth,Mat &R, Mat &T)
{vector<Point2f> image_points; /* 图像上检测到的角点 */Mat imageInput = imread(fileName, IMREAD_COLOR);cout << "image size:" << imageInput.cols << "," << imageInput.rows << endl;cout << "cameraMatrix:" << cameraMatrix << endl;cout << "distCoeffs:" << distCoeffs << endl;// 显示一下纠正后的图像,直观地检查一下传递进来的cameraMatrix、disCoeffs有没有问题Mat undistortMat;undistort(imageInput, undistortMat, cameraMatrix, distCoeffs);imshow("undistort mat", undistortMat);cout << "undistortMat size:" << undistortMat.cols << "," << undistortMat.rows << endl;/* 提取角点 */if (0 == findChessboardCorners(imageInput, board_size, image_points)){cout << "can not find chessboard corners!\n"; //找不到角点return -1;}else{Mat view_gray;cvtColor(imageInput, view_gray, COLOR_RGB2GRAY);/* 亚像素精确化 */find4QuadCornerSubpix(view_gray, image_points, Size(11,11)); //对粗提取的角点进行精确化// // 看看点的排列顺序// image_points_buf[0] += Point2f(-50, -100);// image_points_buf[8] += Point2f(-60, -100);/* 在图像上显示角点位置 */Mat displayImg = imageInput.clone();drawChessboardCorners(displayImg, board_size, image_points, true); //用于在图片中标记角点imshow("Camera Calibration", displayImg);//显示图片}// 上面已经得到了标定板的二维坐标,现在来填充三维坐标vector<Point3f> object_points;for(int i = 0; i < board_size.height; i++){for(int j = 0; j < board_size.width; j++){object_points.push_back(Point3f(rectWidth * j, rectWidth * i, 0));}}// cout << "object points:" << object_points << endl;cout << image_points.size() << " "<< object_points.size() << endl;//创建旋转矩阵和平移矩阵// Mat rvecs = Mat::zeros(3, 1, CV_64FC1);// Mat tvecs = Mat::zeros(3, 1, CV_64FC1);Mat rvec;Mat tvec;//求解pnpbool pnpResult = false;// pnpResult = solvePnP(object_points, image_points, cameraMatrix, distCoeffs, rvec, tvec);pnpResult = solvePnPRansac(object_points, image_points, cameraMatrix, distCoeffs, rvec, tvec);cout << "pnp result:" << pnpResult << endl;if(pnpResult == false){return -2;}Mat rotM;Rodrigues(rvec, rotM); //将旋转向量变换成旋转矩阵R = rotM;T = tvec;// 直观地检验一下计算到的R、T有没有问题{vector<Point2f> image_points2; /* 保存重新计算得到的投影点 */projectPoints(object_points, rvec, tvec, cameraMatrix, distCoeffs, image_points2);/* 在图像上显示角点位置 */Mat displayImg = imageInput.clone();drawChessboardCorners(displayImg, board_size, image_points2, true); //用于在图片中标记角点imshow("projectPoints image", displayImg);//显示图片}return 0;
}// 分别对两个相机进行外参计算
void calcExtrinsicsDemo()
{
//#define calc_rgb // 通过注释这个来切换// 图像路径std::string fileName;Size board_size = Size(7, 6); // 标定板上每行、列的角点数double rectWidth = 0.015; // 标定版棋盘格的大小,单位m//相机内参矩阵Mat cameraMatrix;//相机畸变系数Mat distCoeffs;#ifdef calc_rgbfileName = "/home/yong/Desktop/orbbec/calibration/dual/calibrationdata/right-0000.png"; // rgb 图像路径
#elsefileName = "/home/yong/Desktop/orbbec/calibration/dual/calibrationdata/left-0000.png"; // ir 图像路径
#endif#ifdef calc_rgb// rgb相机参数double camData[] = {628.549051, 0.000000, 324.691230,0.000000, 631.374570, 283.546017,0.000000, 0.000000, 1.000000};cameraMatrix = Mat(3, 3, CV_64F, camData);double distData[] = {0.195904,-0.299118,0.018483,0.005324,0.000000};distCoeffs = Mat(5, 1, CV_64F, distData);
#else// ir相机参数double camData[] = {588.560930, 0.000000 , 306.212790,0.000000 , 590.708852, 250.991143,0.000000 , 0.000000 , 1.000000};cameraMatrix = Mat(3, 3, CV_64F, camData);double distData[] = {-0.044573,0.212463,0.006501,-0.006851,0.000000};distCoeffs = Mat(5, 1, CV_64F, distData);
#endifMat R,T;calcExtrinsics(fileName, cameraMatrix, distCoeffs, board_size, rectWidth, R, T);cout << "R:" << R << endl;cout << "T:" << T << endl;}2.2.求两个相机之间的R、T矩阵
通过上面的代码,计算得到了rgb、ir(depth)相机的外参:
// rgb
//R:[0.9932208622695912, -0.104179968756072, -0.05156406561195055;
// 0.09876316392901367, 0.9902419675733234, -0.09831929163314773;
// 0.06130380251811834, 0.09256014134873089, 0.9938181242210883]
// T:[-0.1985727556503669;
// -0.1321870936778361;
// 0.5274038381890026]// ir
//R:[0.9949185009774844, -0.1001176653598934, 0.01065971367344506;
// 0.1005768682173857, 0.9931508653869539, -0.05946135014214975;
// -0.004633572304179904, 0.06023131796689411, 0.9981736914704138]
// T:[-0.1633382501071563;
// -0.1003269691775472;
// 0.5162717136103199]
然后我们根据【Kinect深度图与RGB摄像头的标定与配准】里面的公式:
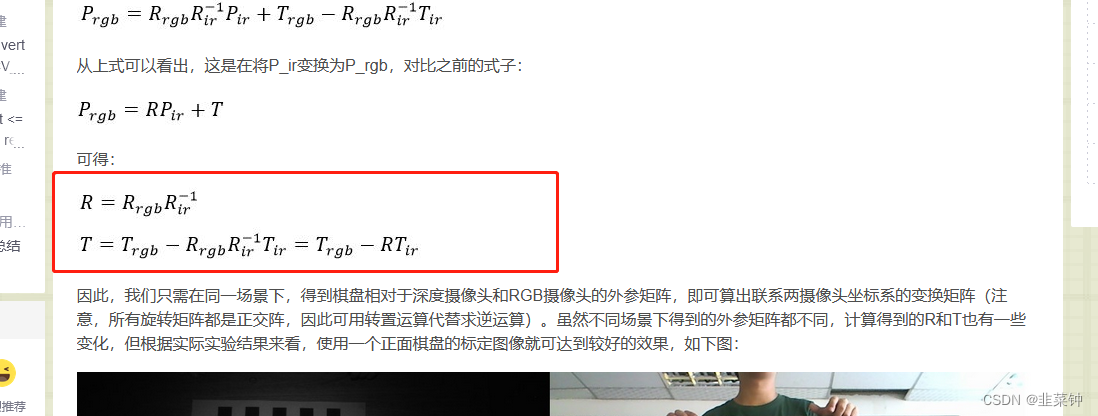 计算一下R、T:
计算一下R、T:
Mat R_rgb, T_rgb, R_ir, T_ir;{double data[] = {0.9932208622695912, -0.104179968756072, -0.05156406561195055,0.09876316392901367, 0.9902419675733234, -0.09831929163314773,0.06130380251811834, 0.09256014134873089, 0.9938181242210883};R_rgb = Mat(3, 3, CV_64F, data).clone();}{double data[] = {-0.1985727556503669, -0.1321870936778361, 0.5274038381890026};T_rgb = Mat(3, 1, CV_64F, data).clone();}{double data[] = {0.9949185009774844, -0.1001176653598934, 0.01065971367344506,0.1005768682173857, 0.9931508653869539, -0.05946135014214975,-0.004633572304179904, 0.06023131796689411, 0.9981736914704138};R_ir = Mat(3, 3, CV_64F, data).clone();}{double data[] = {-0.1633382501071563,-0.1003269691775472,0.5162717136103199};T_ir = Mat(3, 1, CV_64F, data).clone();}// cout << R_rgb << endl << T_rgb;Mat R, T;R = R_rgb * R_ir.inv();T = T_rgb - R*T_ir;cout << "R:" << R << endl;cout << "T:" << T << endl;/*
R:[0.9980544085026888, -0.0005053133907268852, -0.06234695122237745;-0.00192747042416588, 0.9992391545866735, -0.03895377772019822;0.06231919869600642, 0.03899816148599567, 0.9972940694071134]
T:[-0.003415024268825395;-0.01214055388563491;0.02662079621125524]*/
2.3.进行D2C操作
有了R和T,我们就可以用rgb来对点云着色),注意,此时我们不是用ir图了,而是用depth图了,depth图是16uc1类型的,其数值表示深度(单位mm)。
#include <Eigen/Core>
#include <Eigen/LU>void depthToColor(Mat depthMat, Mat bgrMat)
{Eigen::Matrix3f R_ir2rgb;R_ir2rgb <<0.9980544085026888, -0.0005053133907268852, -0.06234695122237745,-0.00192747042416588, 0.9992391545866735, -0.03895377772019822,0.06231919869600642, 0.03899816148599567, 0.9972940694071134;Eigen::Vector3f T_ir2rgb;T_ir2rgb <<-0.003415024268825395,-0.01214055388563491,0.02662079621125524;Eigen::Matrix3f K_ir; // ir内参矩阵K_ir <<588.560930, 0.000000 , 306.212790,0.000000 , 590.708852, 250.991143,0.000000 , 0.000000 , 1.000000;Eigen::Matrix3f K_rgb; // rgb内参矩阵K_rgb <<628.549051, 0.000000, 324.691230,0.000000, 631.374570, 283.546017,0.000000, 0.000000, 1.000000;// Eigen::Matrix3f R;
// Eigen::Vector3f T;
// R = K_rgb*parm->R_ir2rgb*K_ir.inverse();
// T = K_rgb*parm->T_ir2rgb;cout << "K_rgb:\n" << K_rgb << endl;cout << "K_ir:\n" << K_ir << endl;
// cout << "R:\n" << R << endl;
// cout << "T:\n" << T << endl;// 4.2 计算投影Mat result(480, 640, CV_8UC3);int i = 0;for (int row = 0; row < 480; row++){for (int col = 0; col < 640; col++){unsigned short* p = (unsigned short*)depthMat.data;unsigned short depthValue = p[row * 640 + col];//cout << "depthValue " << depthValue << endl;if (depthValue != std::numeric_limits<unsigned short>::infinity() &&depthValue != -std::numeric_limits<unsigned short>::infinity() &&depthValue != 0 &&depthValue != 65535){// 投影到彩色图上的坐标// 1)构造一个三维向量p_ir = (x, y, z),其中x,y是该点的像素坐标,z是该像素的深度值;Eigen::Vector3f p_ir(col, row, 1.0f);// 2)用Kinect内参矩阵H_ir的逆,乘以p_ir得到对应的空间点坐标P_ir,具体公式见上文第四部分(配准);Eigen::Vector3f P_ir = K_ir.inverse() * (p_ir * (depthValue / 1000.f)); // (除以1000,是为了从毫米变米)// 现在这个P_ir,可以放到点云去显示// 3)由于P_ir是该点在Kinect坐标系下的坐标,我们需要将其转换到RGB摄像头的坐标系下,具体的,就是乘以一个旋转矩阵R,再加上一个平移向量T,得到P_rgb;Eigen::Vector3f P_rgb = R_ir2rgb * P_ir + T_ir2rgb;// 4)用RGB摄像头的内参矩阵H_rgb乘以P_rgb,得到p_rgb,// p_rgb也是一个三维向量,其x和y坐标即为该点在RGB图像中的像素坐标,取出该像素的颜色,作为深度图像中对应像素的颜色;Eigen::Vector3f p_rgb = K_rgb * P_rgb;int X = static_cast<int>(p_rgb [0] / p_rgb [2]); // !!!Z_rgb*p_rgb -> p_rgbint Y = static_cast<int>(p_rgb [1] / p_rgb [2]); // !!!Z_rgb*p_rgb -> p_rgb//cout << "X: " << X << " Y: " << Y << endl;if ((X >= 0 && X < 640) && (Y >= 0 && Y < 480)){//cout << "X: " << X << " Y: " << Y << endl;result.data[i * 3] = bgrMat.data[3 * (Y * 640 + X)];result.data[i * 3 + 1] = bgrMat.data[3 * (Y * 640 + X) + 1];result.data[i * 3 + 2] = bgrMat.data[3 * (Y * 640 + X) + 2];}else{result.data[i * 3] = 0;result.data[i * 3 + 1] = 0;result.data[i * 3 + 2] = 0;}}else{result.data[i * 3] = 0;result.data[i * 3 + 1] = 0;result.data[i * 3 + 2] = 0;}i++;}}imshow("result", result);
}
根据原文的介绍:
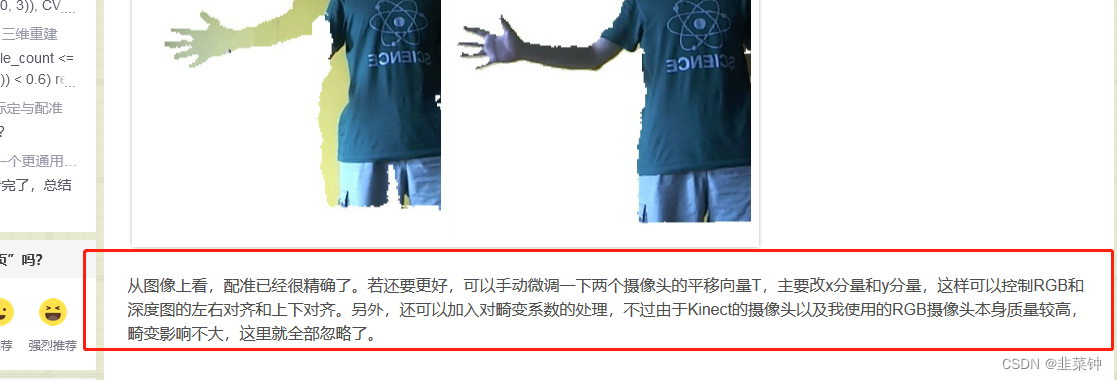
在应用R、T矩阵时,可以根据实际情况微调一下T矩阵的x、y
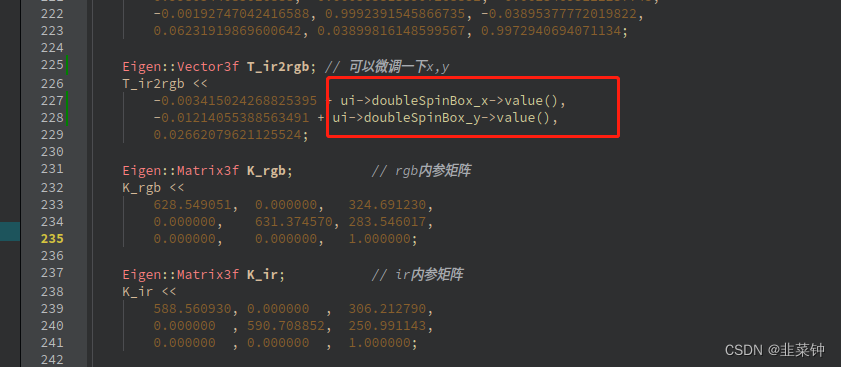
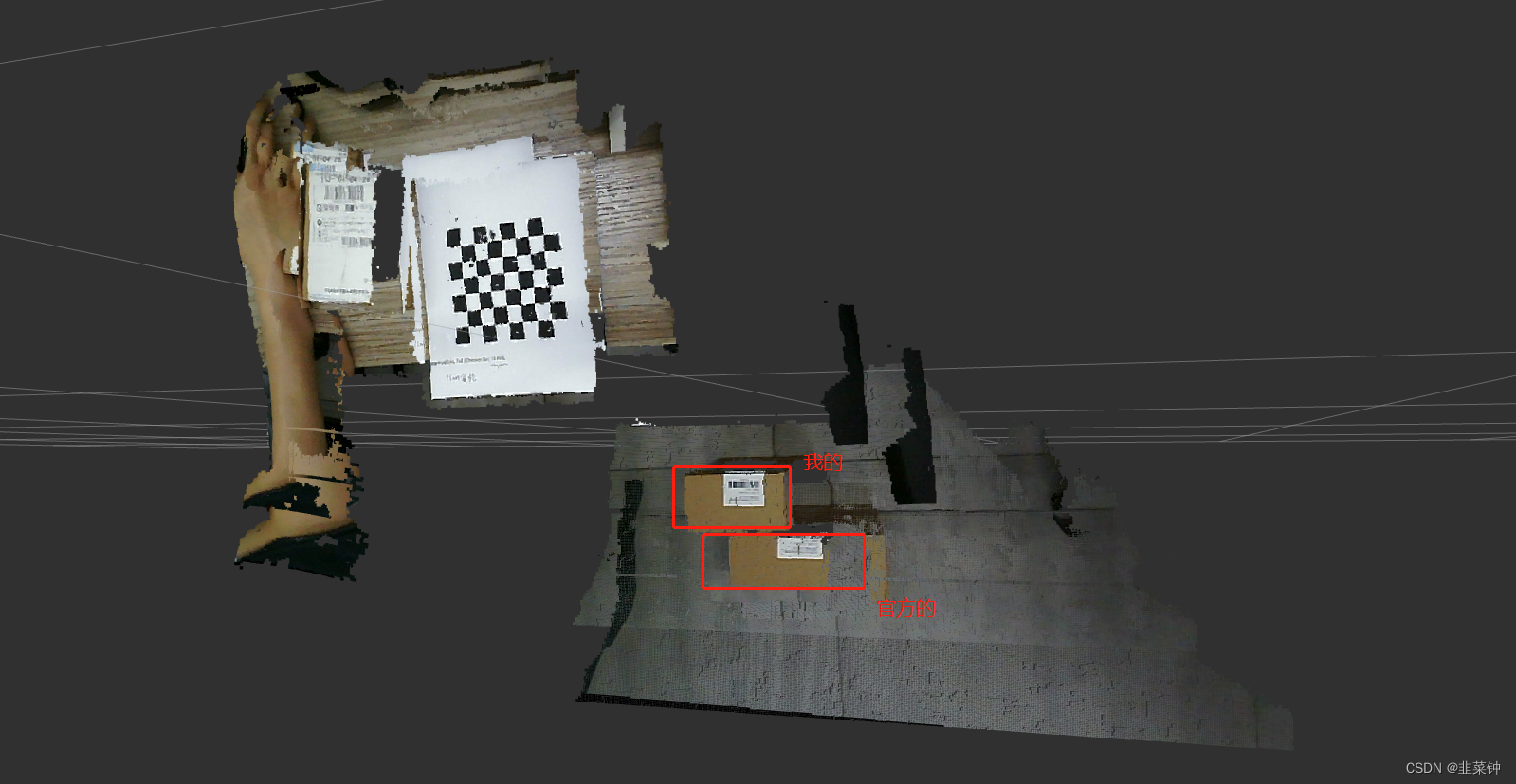
但是经过尝试,假如调好了近处的物体,远处的物体和颜色又对不齐;反之亦然。可能是硬件的问题。
另外,我用这种方式得到点云与官方的点云在X、Y方向有较大的偏差,可能是我通过标定得到的内参和官方的内参存在较大差异导致的。
3.题外话
我们用的点云来源自IR相机,点云的坐标(XYZ)是基于IR相机坐标系的。因此手眼标定时,要用IR相机去参与标定,而不是RGB相机。
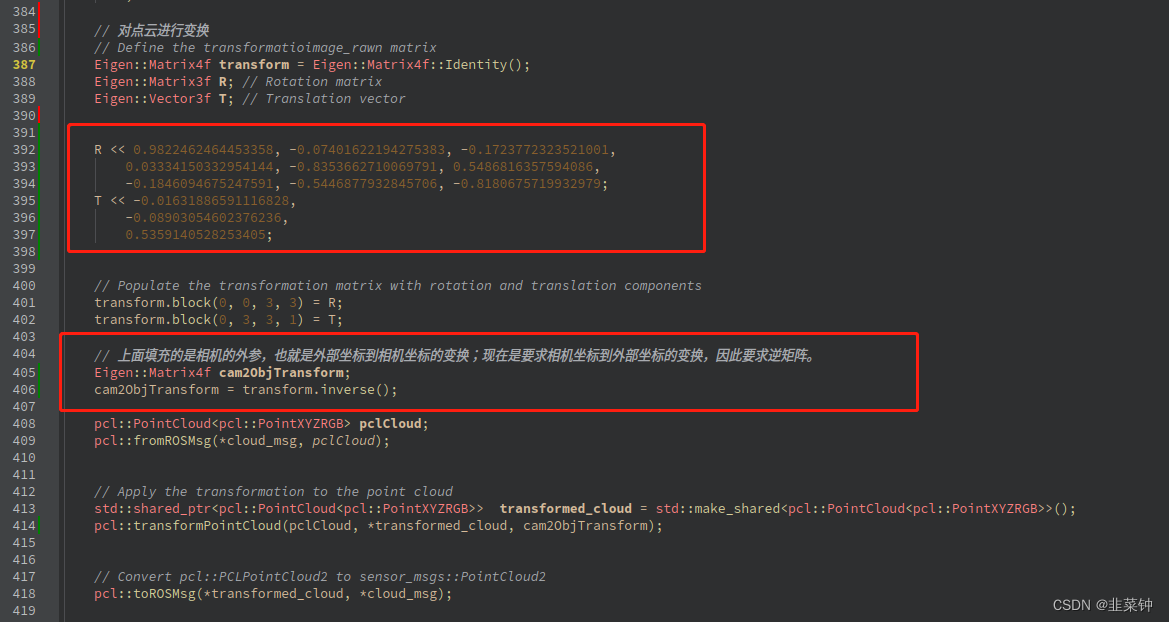
我们先小试牛刀,将点云的坐标变换到标定板坐标系下,效果如下:
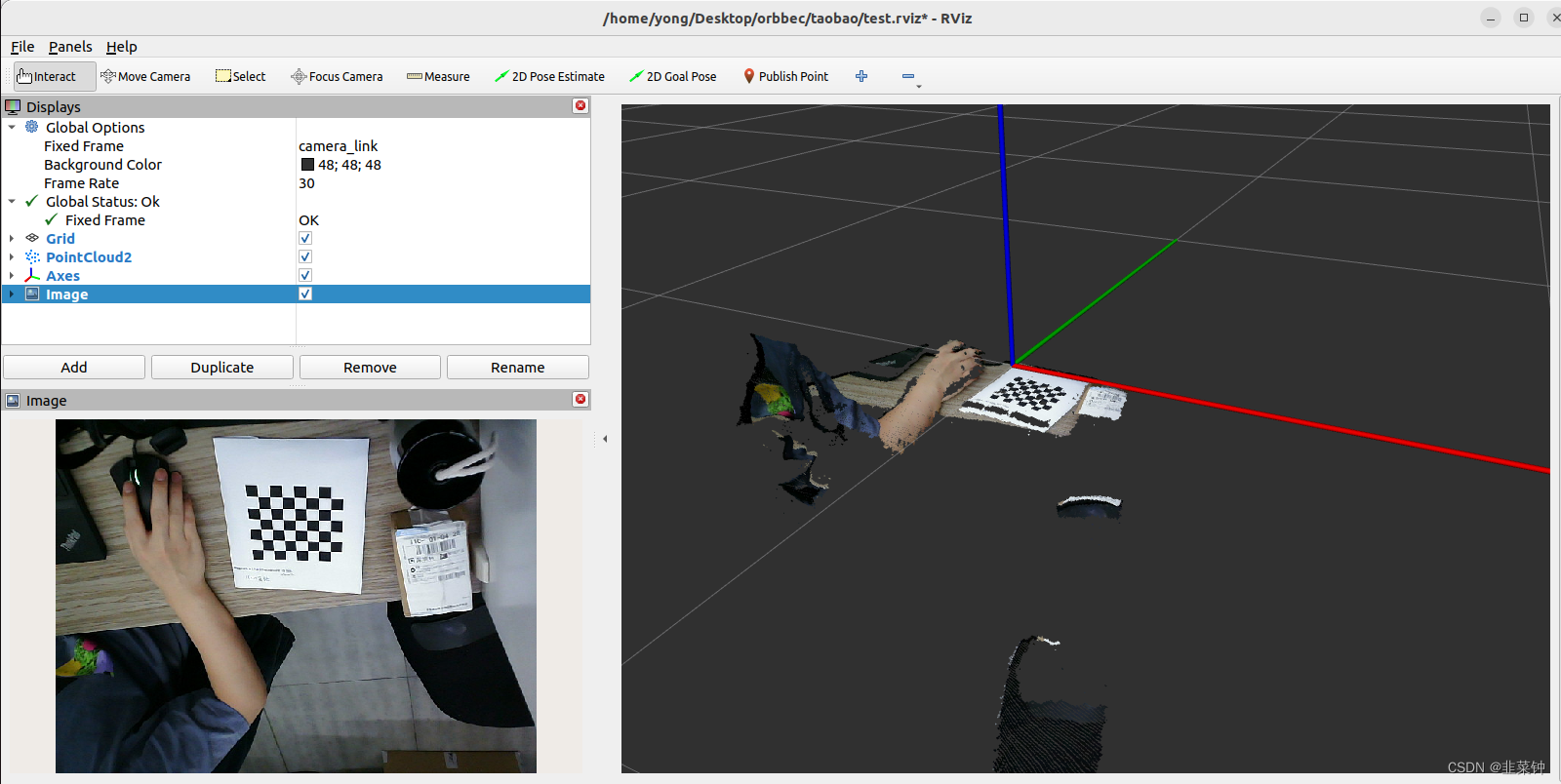
可以看到,我虽然斜着放置相机,但是经过标定后,点云的姿态是能够与标定板表示的坐标系基本对齐的。
方法其实也就是拿IR相机针对标定板得到的外参(R、T)组成变换矩阵transform,由于此时的transform是标定板到相机的变换,而我们要将相机坐标系下的坐标转变为标定板坐标系下的坐标,因此需要求逆矩阵cam2ObjTransform,然后用它来对点云作变换。
参考:
【1.Astra相机标定】
【【Nav2中文网】ROS2单目相机标定教程】
【深度图与彩色图的配准与对齐】
【Kinect深度图与RGB摄像头的标定与配准】
【RGBD相机实用问题】
【相机内参标定究竟标了什么?相机内参外参保姆级教程】
相关文章:
ORBBEC(奥比中光)AstraPro相机在ROS2下的标定与D2C(标定与配准)
文章目录 1.rgb、depth相机标定矫正1.1.标定rgb相机1.2.标定depth相机1.3.rgb、depth相机一起标定(效果重复了,但是推荐使用)1.4.取得标定结果1.4.1.得到的标定结果的意义 1.5.IR、RGB相机分别应用标定结果1.5.1.openCV应用标定结果1.5.2.ros…...

常量与变量:编程中重要的两种数据类型
常量与变量 在编程中,我们常常需要存储一些数据。这些数据有些是恒定不变的,有些却是可以随时变化的。对于恒定不变的数据,我们称之为常量;对于可以变化的数据,我们则称之为变量。这两种数据类型在程序中非常重要&…...

( 数组和矩阵) 287. 寻找重复数 ——【Leetcode每日一题】
❓287. 寻找重复数 难度:中等 给定一个包含 n 1 个整数的数组 nums ,其数字都在 [1, n] 范围内(包括 1 和 n),可知至少存在一个重复的整数。 假设 nums 只有 一个重复的整数 ,返回 这个重复的数 。 你…...

【学习笔记】「JOISC 2022 Day2」复制粘贴 3
看了正解。我觉得很厉害。虽然用减枝水过去了。 区间 d p dp dp。但是这个转移怎么看都不是 O ( 1 ) O(1) O(1)的。 border \text{border} border 那么 trick \text{trick} trick应该都能看出来。能进行剪切操作当且仅当 s [ l , p ] s [ q , r ] s_{[l,p]}s_{[q,r]} s[l,p]…...

武忠祥老师每日一题||定积分基础训练(三)
常用的基本不等式: sin x < x < t a n x , x ∈ ( 0 , π 2 ) \sin x<x<\ tan x,x\in(0,\frac{\pi}{2}) sinx<x< tanx,x∈(0,2π) e x ≥ 1 x , x ∈ ( − ∞ , ∞ ) e^x\ge1x,x\in(-\infty,\infty) ex≥1x,x∈(−∞,∞) x 1 x ≤ ln …...

Docker安装常用软件-Apollo(有问题)
零:apollo概念介绍 官网网站:GitHub - apolloconfig/apollo: Apollo is a reliable configuration management system suitable for microservice configuration management scenarios. gitee网址:mirrors / ctripcorp / apollo GitCode …...
f(x)与|f(x)|,f ‘ (x),F(x)常见关系。
1.f(x)与|f(x)|关系。 1.连续关系。(f(x)在"[a,b]上连续" > |f(x)|在"[a,b]连续") ①如果f(x)在[a,b]上连续。则|f(x)|在[a,b]上连续. (因为f(x)在x0的连续点>x0必为|f(x)|的连续点) 注:”[a,b]连续“包括&#…...

今天面了一个来字节要求月薪23K,明显感觉他背了很多面试题...
最近有朋友去字节面试,面试前后进行了20天左右,包含4轮电话面试、1轮笔试、1轮主管视频面试、1轮hr视频面试。 据他所说,80%的人都会栽在第一轮面试,要不是他面试前做足准备,估计都坚持不完后面几轮面试。 其实&…...
)
如何使用二元三次回归分析建立预测模型?(分析、原理、代码示例)
二元三次回归是一种用于建立两个自变量与一个因变量之间关系的回归模型,常用于数据分析和预测。下面我会更详细地解释一下二元三次回归的原理、分析和示例代码。 1、原理 二元三次回归分析用多项式回归建立预测模型,其中包括两个自变量(通常…...
面向万物智联的应用框架的思考和探索(上)
原文:面向万物智联的应用框架的思考和探索(上),点击链接查看更多技术内容。 应用框架,是操作系统连接开发者生态,实现用户体验的关键基础设施。其中,开发效率和运行体验是永恒的诉求,…...

《Python机器学习基础教程》第1章学习笔记
目录 第1章 引言 1.1 为何选择机器学习 1.1.1 机器学习能够解决的问题 第1章 引言 机器学习又称为预测分析或统计学习,是一个交叉学科,是从数据中提取知识。 1.1 为何选择机器学习 智能应用早期,使用专家设计的规则体系来设计。 缺点&…...

ClickHouse 内存管理是如何实现的
概述 本文介绍Clickhouse内存管理的实现原理。通过本文的分析,可以对Clickhouse的内存管理有一个概要的理解。 Clickouse内存管理组成 ClickHouse 使用内存管理系统来控制内存资源的分配和释放。内存管理系统的主要组成部分是: 内存池:Cl…...

docker容器技术
什么是docker Docker 使用 Google 公司推出的 Go 语言 进行开发实现,基于 Linux 内核的 cgroup,namespace,以及 OverlayFS 类的 Union FS 等技术,对进程进行封装隔离,属于 操作系统层面的虚拟化技术。由于隔离的进程独…...
设计模式七大设计原则
文章目录 1、什么是设计模式2、单一职责原则3、开闭原则4、接口隔离原则5、依赖倒置原则6、迪米特法则(最少知道原则)7、里式替换原则8、组合优于继承 设计模式主要是为了满足一个字 变,这个字,可能是需求变更、可能是场景变更&a…...
【Hello Network】TCP协议相关理解
作者:小萌新 专栏:网络 作者简介:大二学生 希望能和大家一起进步 本篇博客简介:补充下对于TCP协议的各种理解 TCP协议相关实验 TCP相关试验理解CLOSE_WAIT状态理解TIME_WAIT状态解决TIME_WAIT状态引起的bind失败的方法理解listen的…...

实施CRM目标有哪几步?如何制定CRM目标?
在当今竞争激烈的商业环境中,与客户建立持久的关系是企业重要的工作。CRM客户管理系统能有效帮助企业管理优化流程、管理客户,提高销售成功率,推动收入增长。那么您了解如何实施CRM吗?下面说说实施CRM目标是什么,如何设…...
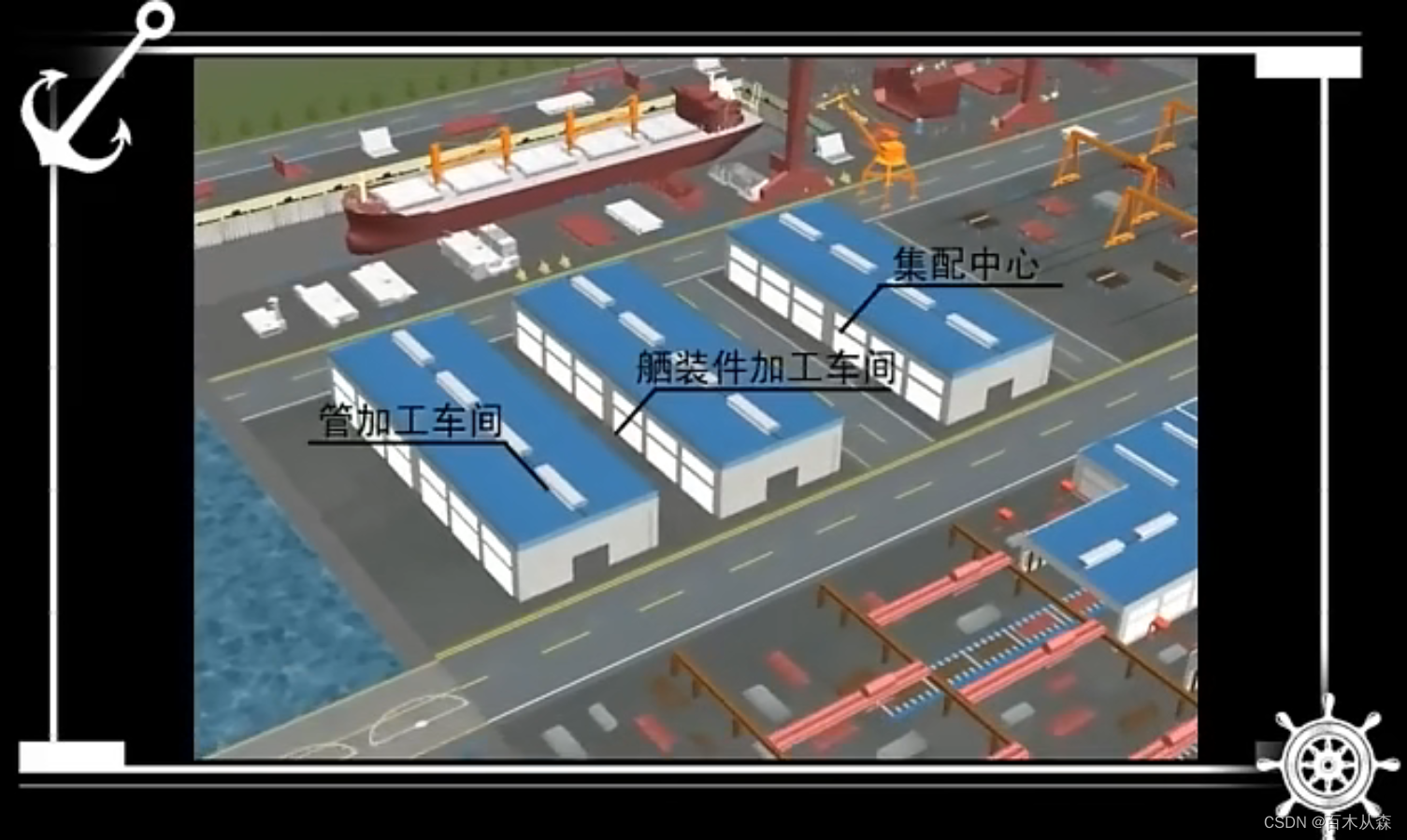
船舶建造概论(船舶建造工艺任务与现代造船模式)
船舶建造概论 1 船舶建造概论1.1 船舶建造工艺主要任务1.2 船舶建造流程(1)钢材料预处理(2) 钢材料加工(3)分段制作(4)总段制作(5)船台合拢(6&…...
项目内训(2023.5.6)
目录 Nacos是什么? 领域模型是什么? domain模块一般是干什么的? 在小乌龟中合并其他分支的作用是什么? nacos的配置文件 服务集群、服务提供、服务更加灵活庞大、消费服务、访问比较麻烦,A和B服务一起访问 系统结…...
【操作系统OS】学习笔记第二章 进程与线程(下)【哈工大李治军老师】
基于本人观看学习 哈工大李治军老师主讲的操作系统课程 所做的笔记,仅进行交流分享。 特此鸣谢李治军老师,操作系统的神作! 如果本篇笔记帮助到了你,还请点赞 关注 支持一下 ♡>𖥦<)!! 主页专栏有更多࿰…...
)
Linux命令集(Linux文件管理命令--rmdir指令篇)
Linux命令集(Linux文件管理命令--rmdir指令篇) Linux文件管理命令集(rmdir指令篇)5. rmdir(remove directory)1. 删除空的目录 folder12. 强制删除目录 folder1(包括非空目录)3. 递归删除目录及其目录下所有…...

MentalLLaMA:基于指令微调的可解释心理健康分析大模型实践
1. 项目概述:MentalLLaMA——一个面向社交媒体心理健康分析的指令微调大语言模型 如果你正在关注大语言模型在垂直领域的应用,特别是如何让AI模型在理解人类复杂情感和心理状态时,不仅能“判断”,还能“解释”,那么这个…...

运维实战:ESXi主机物理网卡闪断致部分VM网络中断的排查与应急恢复
1. 故障现象与初步判断 那天凌晨2点15分,值班手机突然响起刺耳的告警声。监控系统显示,ESXi主机上的三台关键业务虚拟机网络连接中断,而其他虚拟机却运行正常。这种部分VM断网的情况立刻引起了我的警觉——这通常意味着问题出在物理层而非虚拟…...

定制你的弹窗外观:WYPopoverController主题设置与颜色方案全攻略
定制你的弹窗外观:WYPopoverController主题设置与颜色方案全攻略 【免费下载链接】WYPopoverController WYPopoverController is for the presentation of content in popover on iPhone / iPad devices. Very customizable. 项目地址: https://gitcode.com/gh_mi…...

机器学习40讲-13:线性降维主成分的使用
分享一个大牛的人工智能 教程。零基础!通俗易懂!风趣幽默!希望你也加入到人工智能的队伍中来!请轻击人工智能教程https://www.captainai.net/troubleshooter 在前一篇文章中,我以岭回归和LASSO为例介绍了线性回归的正则化处理。这两种方法都属于收缩方法(shr…...

AI架构绘图副驾驶:用自然语言生成专业Excalidraw架构图
1. 项目概述与核心价值 如果你和我一样,每天都要面对陌生的、动辄几十个微服务的复杂代码库,或者需要向团队解释一个新系统的设计,那你一定理解那种“认知过载”的痛苦。在脑海里构建整个系统的架构图,试图理清服务间的调用关系和…...

5分钟掌握HunterPie:提升《怪物猎人:世界》狩猎效率的完整游戏辅助工具指南
5分钟掌握HunterPie:提升《怪物猎人:世界》狩猎效率的完整游戏辅助工具指南 【免费下载链接】HunterPie-legacy A complete, modern and clean overlay with Discord Rich Presence integration for Monster Hunter: World. 项目地址: https://gitcode…...

5G与4G LTE互操作:无缝衔接,共筑通信新生态
5G与4G LTE互操作:无缝衔接,共筑通信新生态 在移动通信技术日新月异的今天,5G作为新一代通信技术,正逐步融入我们的生活,与4G LTE形成互补共存的局面。5G与4G LTE之间的互操作,不仅关乎用户体验的连续性&am…...

突破大语言模型平滑诅咒:Emergence Codex语义架构与OpenClaw实战指南
1. 项目概述:什么是 Emergence Codex 与 OpenClaw Skill如果你和我一样,在深度使用大语言模型(LLM)构建智能体或进行复杂推理任务时,常常感到一种无力感——无论你怎么精心设计提示词(Prompt)&a…...

第三篇:变量
一.变量 1.变量的创建 (1)语法格式:data_type name; 补充:其中“data_type"是数据类型,”name"是变量名,变量名根据需求随意取即可,但尽量取得有意义 例如:int age 10;(创…...
)
Java数据结构6(队列和二叉树初步)
目录1,队列的性质2,循环队列3,队列链式存储4,树的性质5,二叉树的遍历6,代码实现一,队列的性质同样是线性表,队列有线性表的相关操作,不过不同的是队列的性质为先进先出&a…...