有仰拍相机和俯拍相机时,俯拍相机中心和吸嘴中心的标定
俯拍相机中心和吸嘴中心的标定
文章目录
- 俯拍相机中心和吸嘴中心的标定
- 前言
- 适用模型如下:
- 一、使用一个标定片进行标定
- 1.关键注意:
- 2.标定步骤:
- 二、使用一个L型的工件
- 1.关键注意:
- 2.标定步骤:
- 总结
前言
在自动化设备领域,使用相机进行定位是很普遍存在的,而使用相机定位就必定会用到标定,本文介绍两种关于吸嘴上方的俯拍相机和吸嘴中心的标定方法(前提是带有仰拍相机和俯拍相机)。【还有很多相机的使用场景的标定方法将在以后的文章中进行阐述】
适用模型如下:

一、使用一个标定片进行标定
1.关键注意:
关键是使用两个相机的中心和识别偏差,得到两个相机的中心固定偏差。
注:后续俯拍相机拍物料识别得到的偏差以吸嘴中心在俯拍相机中心的位置为基准进行补偿即可。
2.标定步骤:
- 取料头吸嘴在仰拍相机中PR识别,并移动到相机中心。记录此时的位置为A(x,y)。
- 在俯拍相机视野中放个标定玻璃片,识别并取得PR结果保存为offset1(x1,y1)。
- 控制吸嘴移动到标定玻璃片上方,吸取玻璃片并移动到点A,然后识别得到offset2(x2,y2)。
- 综合使用点A位置和两个offset可计算得到俯拍相机中心和仰拍相机中心的偏差,此偏差为固定安装偏差,由于在仰拍相机中可以识别一下吸嘴中心,再加上两个相机之间的偏差,就可以推算得到吸嘴中心在俯拍相机中心的位置。
二、使用一个L型的工件
1.关键注意:
需要镂空此L型工件识别区域,使得俯拍相机和仰拍相机都能识别到同一个位置的特征。如下图所示:

2.标定步骤:
- 移动吸嘴,使得识别特征在俯拍相机中识别一下,记录此时轴的识别位置A和PR返回偏差offset1(x1,y1)。(由此可计算得到将识别特征中心移动到俯拍相机中心的位置P1)。
- 移动吸嘴,使得识别特征在仰拍相机中识别一下,记录此时轴的识别位置B和PR返回偏差offset(x2,y2)。(由此可以计算得到将识别特征中心移动到仰拍相机中心的位置P2)。
- 由P2减去P1可得到两个相机的安装偏差。
总结
建议使用L型工件进行标定,因为进行俯拍相机的比例标定时,是肯定需要用到一个L型工件从吸嘴延伸出来,使得俯拍相机能识别到进行标定的,只是工件需要镂空并放上可以两个相机都识别得到的玻璃片。
相关文章:
有仰拍相机和俯拍相机时,俯拍相机中心和吸嘴中心的标定
俯拍相机中心和吸嘴中心的标定 文章目录 俯拍相机中心和吸嘴中心的标定 前言适用模型如下:一、使用一个标定片进行标定1.关键注意:2.标定步骤: 二、使用一个L型的工件1.关键注意:2.标定步骤: 总结 前言 在自动化设备领…...

【Vue学习笔记5】Vue3中的响应式:ref和reactive、watchEffect和watch
所谓响应式就是界面和数据同步,能实现实时更新。 Vue 中用过三种响应式解决方案,分别是 defineProperty、Proxy 和 value setter。Vue 2 使用的方案是 defineProperty API。Vue3中使用的方案是Proxy和value setter。 1. ref和reactive vue3中实现响应…...

自动化测试工具的基本原理以及应用场景
自动化测试工具是现代软件开发流程中必不可少的组成部分,它可以通过编写脚本或使用图形用户界面工具自动化测试过程,提高测试的效率和准确性。本文将介绍自动化测试工具的基本原理以及应用场景。 自动化测试工具的基本原理 自动化测试工具通常采用的原理…...
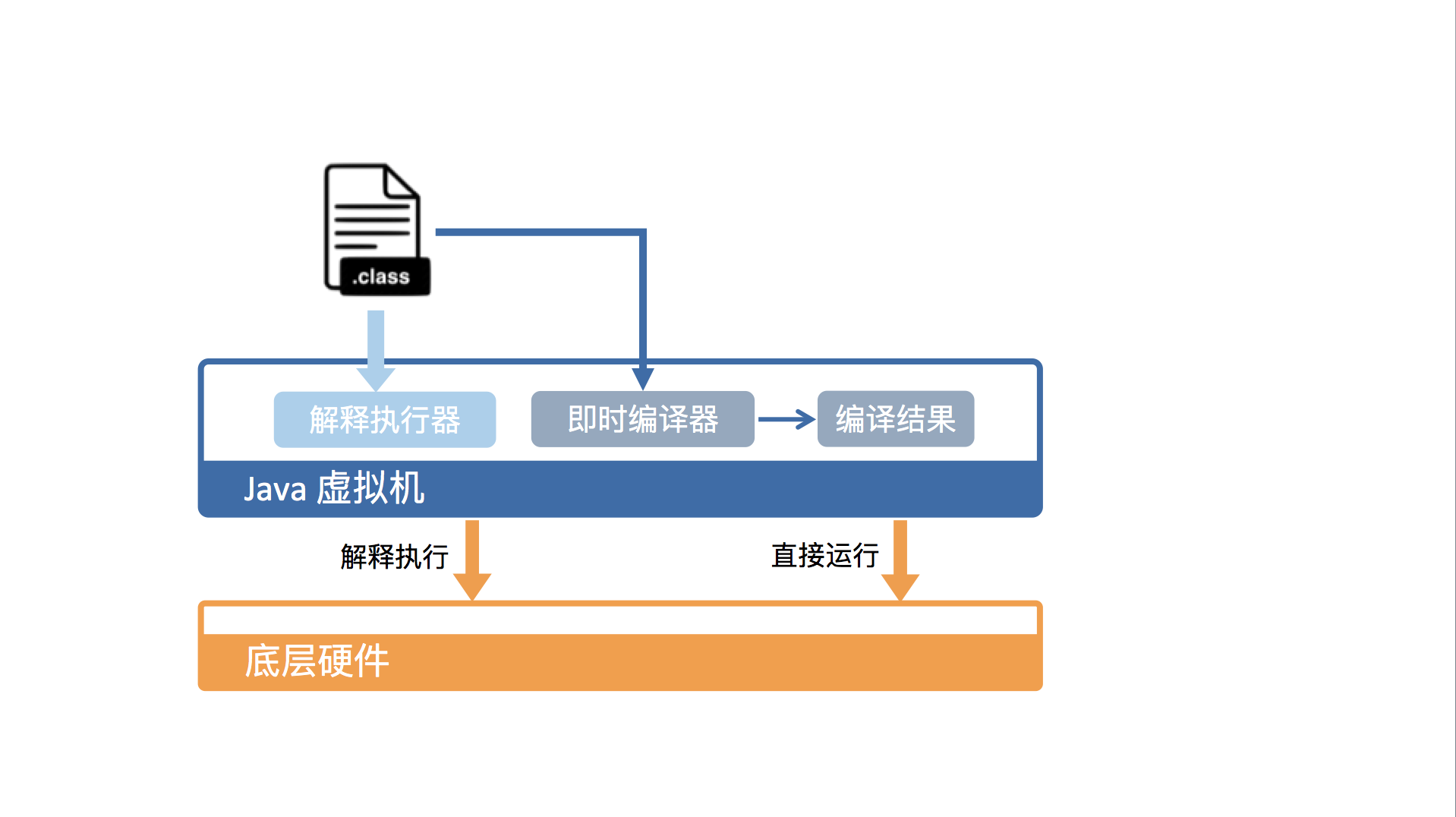
《Java虚拟机学习》 java代码的运行过程
1. Java文件转换 当我们保存java文件后,首先由编译器编译成class文件,然后通过Java虚拟机将class文件转换成字节码文件 2.Java虚拟机是怎么运行Java文件 首先将java文件加载到java虚拟机中,然后由虚拟机将类元信息存储在 虚拟机的方法区中。…...

关于Intel处理器架构中AVX2里Gather特性的说明
在 Intel Haswell 架构里引入了 Gather 特性。它使得CPU可以使用向量索引存储器编址从存储器取非连续的数据元素。这些gather指令引入了一种新的存储器寻址形式,该形式由一个 基地址寄存器(仍然是通用目的寄存器)和通过一个 向量寄存器&#…...
)
UNIX常用命令(C站最全,一文通关)
unix常见命令列举如下,除了看还要会用: ls - 列出目录下的文件 cd - 切换目录 pwd - 显示当前目录 mkdir - 创建目录 rm - 删除文件或目录 rmdir - 删除空目录 cp - 复制文件或目录 mv - 移动文件或目录,或重命名 cat - 显示文件内容 less - 分…...

Vue监听属性详细讲解
文章目录 定义要监听的属性定义 watch修改监听的属性值监听数组变化监听对象变化监听计算属性变化监听事件变化监听路由变化 在 Vue 中,可以使用 watch/$watch 方法监听数据、计算属性、事件和路由的变化,从而实现数据绑定、事件监听和路由控制等功能。需…...

网申形式一览:这三种投递方式,你了解吗?
银行校招是个滚动的过程,每家银行的网申期并不一致。想要在看重的银行网申期投出一份漂亮的简历,简历自身要“过硬”。是不是还有同学不清楚网申简历形式? 从如信银行考试中心了解到,银行网申,尤其是大行网申ÿ…...

vue项目将多张图片生成一个gif动图
当前做项目有一个需求是将多张图片生成一个gif动图的形式 类似下面图片几张图片叠加生成一个gif动图 图片涉及工作隐私,就不公开啦 我们要引入一个gif.js的引入包,但是他没有直接引入的方式,只能从官方下载文件包,下载地址&#…...

开心档之Go 语言常量
Go 语言常量 常量是一个简单值的标识符,在程序运行时,不会被修改的量。 常量中的数据类型只可以是布尔型、数字型(整数型、浮点型和复数)和字符串型。 常量的定义格式: const identifier [type] value你可以省略类…...
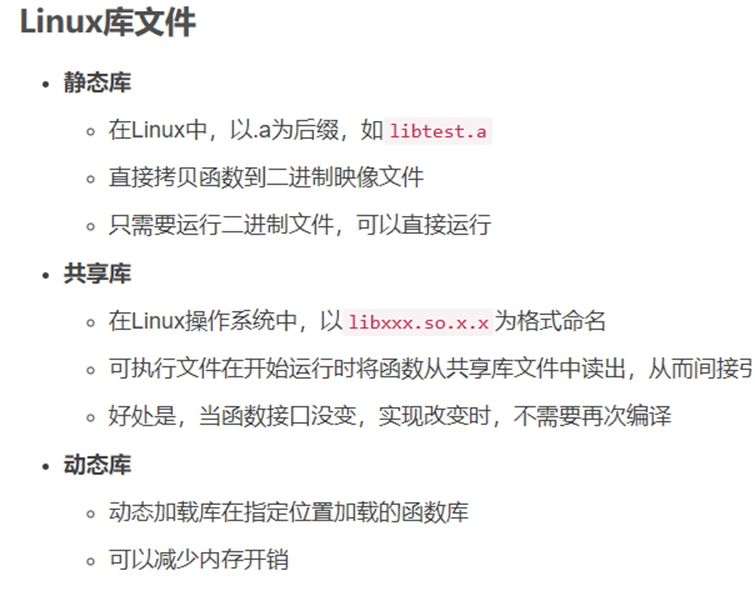
动态库和静态库的使用
一、什么是库? 库是一种可执行代码的二进制形式,可以被操作系统载入内存执行。就是将源代码转化为二进制格式的源代码,相当于进行了加密,别人可以使用库,但是看不到库中的内容。 常见的库类型 共享库 静态库 动态库…...
前端:20 个常见的前端算法题
现在面试中,算法出现的频率越来越高了,大厂基本必考 今天给大家带来 20 个常见的前端算法题,重要的地方已添加注释,如有不正确的地方,欢迎多多指正 💕 1、两数之和 题目: 给定一个数组 nums …...
【Linux】多线程 --- 线程概念 控制 封装
从前种种,譬如昨日死。从后种种,往如今日生。 文章目录 一、线程概念1.重新理解用户级页表1.1 进程资源如何进行分配呢?(地址空间页表)1.2 虚拟地址如何转换到物理地址?(页目录页表项࿰…...

最长递增子序列的长度 _ 贪心+二分查找 _ 20230510
最长递增子序列的长度 _ 贪心二分查找 _ 20230510 前言 最长递增子序列的程序一般采用动态规划方式,使用bottom-up的数组记忆方式比较容易理解,当然也可以采用top-down的递归模式。本文主要讨论如何利用贪心策略,同时辅助以二分查找的方式实…...

VMware ESXi 7.0 U3m Unlocker OEM BIOS 集成网卡驱动和 NVMe 驱动 (集成驱动版)
ESXi 7 U3 标准版集成 Intel 网卡、USB 网卡 和 NVMe 驱动 请访问原文链接:https://sysin.org/blog/vmware-esxi-7-u3-sysin/,查看最新版。原创作品,转载请保留出处。 作者主页:sysin.org 2023-05-03,发布 ESXi 7.0U…...

Scrum敏捷开发和项目管理流程及工具
Scrum是全球运用最广泛的敏捷管理框架,Leangoo基于Scrum框架提供了一系列的流程和模板,可以帮助敏捷团队快速启动Scrum敏捷开发。 这里可以介绍一下在scrum中单团队敏捷开发如何管理,单团队敏捷开发主要是针对10-15人以下,只有一…...

微服务之配置中心
文章目录 1什么是配置2什么是配置中心3为什么我们要用配置中心4特点 1什么是配置 就是springboot中的application.yml/properties文件 比如:项目名、端口号、数据库连接参数、启动参数等。 2什么是配置中心 配置中心就是用来管理项目当中所有配置的系统ÿ…...
windows下安装OpenCL
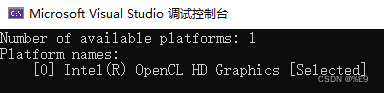
由于我的电脑是windows10,显卡是集显Intel UHD Graphics 630。 下载Intel的SDK for OpenCL,下载地址https://software.intel.com/en-us/opencl-sdk/choose-download,也可以在我的资源里面直接下载https://download.csdn.net/download/qq_363…...
前端项目的通用优化策略
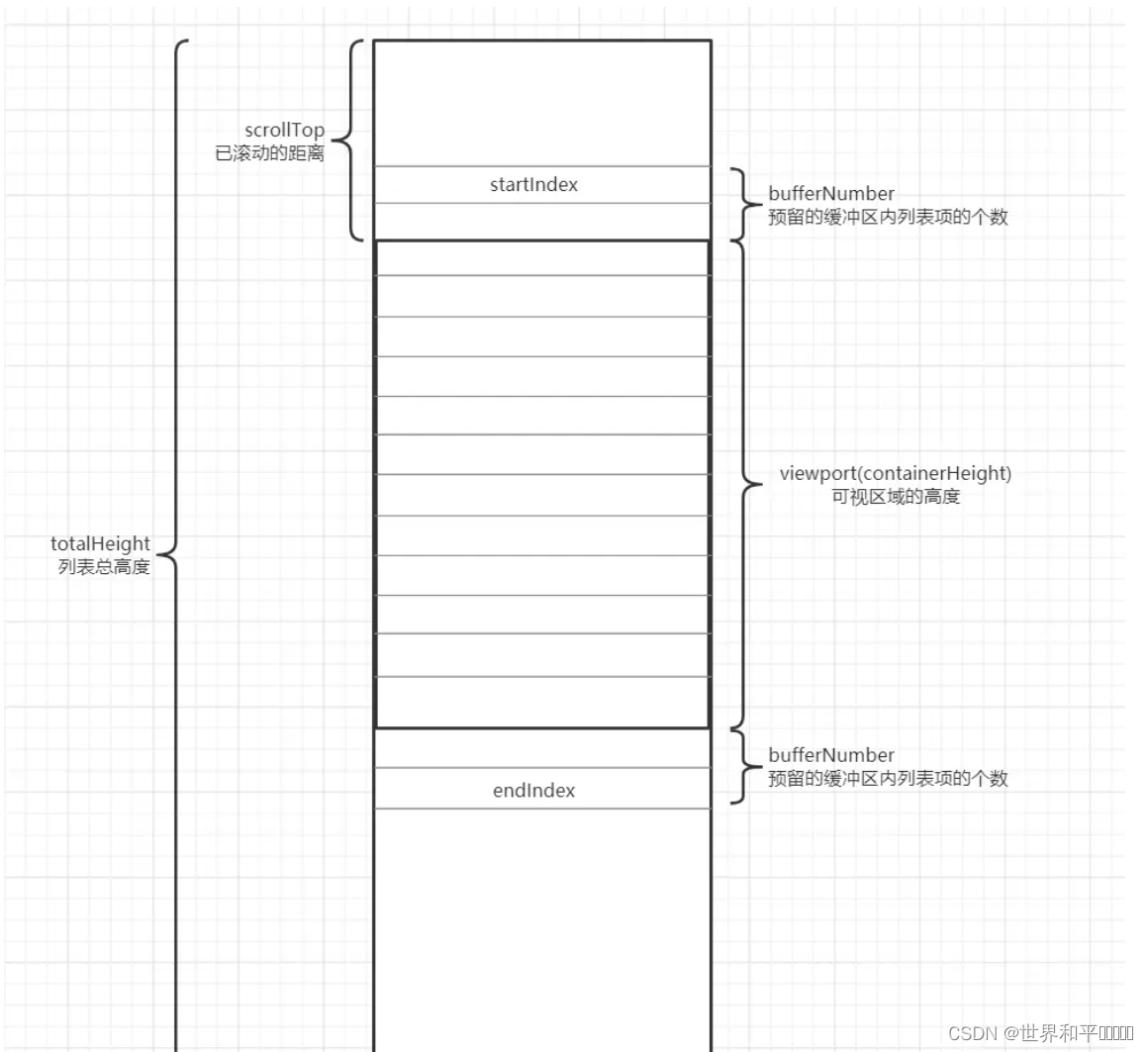
一、虚拟滚动 当我们开发的时候,遇到大数据加载,页面卡顿的问题应该如何处理?大多数情况下,我们都是尽量通过分页的方式处理这类问题,但是总有一些特殊的情况我们必须把数据全部加载到前端进行处理。我曾经遇到过一个…...
关于 IO、存储、硬盘和文件系统
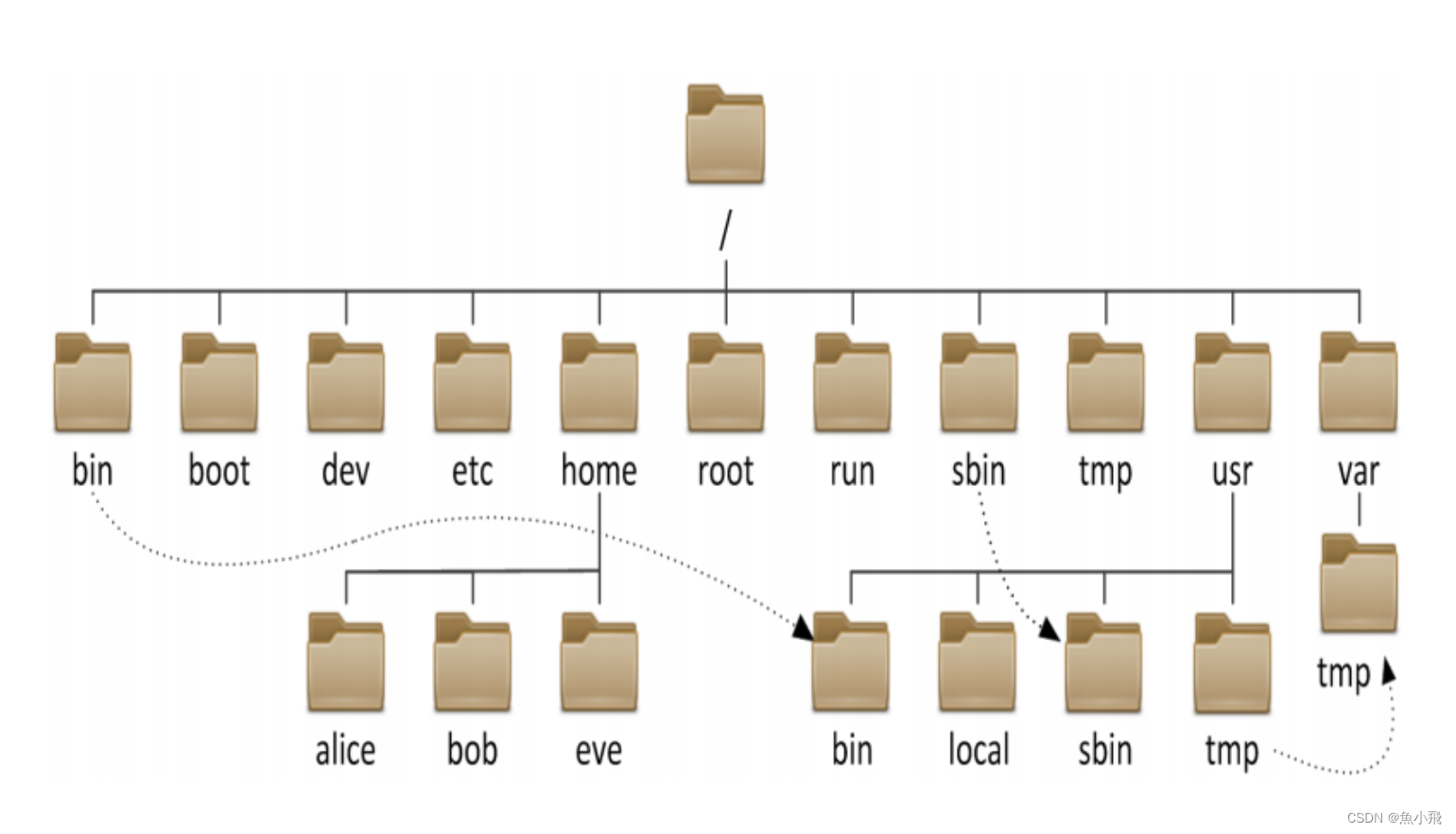
关于IO、存储、硬盘和文件系统 0.引入1.了解IO1.1.存储器IO1.2.设备IO 2.存储介质和存储类型2.1.内存2.2.硬盘2.3.固态硬盘(SSD)2.4.U盘 3.硬盘的工作原理3.1.磁头3.2.盘片3.3.电动机3.4.硬盘的读写操作 4.文件系统概述4.1.文件系统的类型4.2.文件系统的…...
)
Veo 2提示词效能跃迁实战(工业级Prompt链构建全图谱)
更多请点击: https://codechina.net 第一章:Veo 2提示词编写的核心范式演进 Veo 2作为新一代视频生成模型,其提示词(prompt)工程已从早期的“关键词堆叠”转向结构化、语义分层与意图对齐的复合范式。这一演进并非简…...

Ubuntu经常安装软件
1、垃圾清理工具stacer sudo apt updatesudo apt install stacer apt cleanapt autocleanapt autoremove 2、类似与everything的工具Fsearcch 1sudo add-apt-repository ppa:christian-boxdoerfer/fsearch-stable 2sudo apt update 3sudo apt install fsearch (注…...

保姆级教程:在Windows 10上用QEMU+Kylin搭建可内外网访问的完整开发环境
在Windows 10上构建QEMUKylin全功能开发环境的终极指南当开发者需要在本地快速搭建一个隔离的国产操作系统开发环境时,QEMU虚拟化方案配合银河麒麟系统能提供高度灵活的沙箱体验。本文将手把手带你完成从零配置到内外网联通的完整工作流,涵盖虚拟化环境部…...

观察Token消耗明细,Taotoken用量看板如何帮助控制预算
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 观察Token消耗明细,Taotoken用量看板如何帮助控制预算 对于个人开发者或项目管理者而言,在使用大模型API时…...

如何快速实现U盘文件自动备份:USBCopyer终极指南
如何快速实现U盘文件自动备份:USBCopyer终极指南 【免费下载链接】USBCopyer 😉 用于在插上U盘后自动按需复制该U盘的文件。”备份&偷U盘文件的神器”(写作USBCopyer,读作USBCopier) 项目地址: https://gitcode.…...

三步破解百度网盘限速:免费获取真实下载链接的终极指南
三步破解百度网盘限速:免费获取真实下载链接的终极指南 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 还在为百度网盘几十KB的龟速下载而苦恼吗?想要彻…...

第十五章:Agent产品的监控与可观测性:如何构建“看得见、管得住“的AI系统
导读 想象一下:你上线了一个客服Agent,第一个月运行平稳。第二个月开始,你陆续收到用户投诉说"答案不对"。但你的监控系统显示:请求量正常、延迟正常、错误率正常。你打开日志,发现Agent确实"成功"处理了每个请求——只是它给错了答案。 这不是监控…...

VisualCppRedist AIO:Windows系统依赖问题终极解决方案,一键修复所有VC++运行库
VisualCppRedist AIO:Windows系统依赖问题终极解决方案,一键修复所有VC运行库 【免费下载链接】vcredist AIO Repack for latest Microsoft Visual C Redistributable Runtimes 项目地址: https://gitcode.com/gh_mirrors/vc/vcredist 你是否曾经…...

KMS智能激活工具:如何一键永久激活Windows和Office的完整指南
KMS智能激活工具:如何一键永久激活Windows和Office的完整指南 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为Windows和Office激活问题而烦恼吗?每次系统重装后都要…...

基于傅里叶神经算子的含时密度泛函理论加速模拟
1. 项目概述与核心思路在计算材料科学和量子化学领域,模拟电子在激光等外场驱动下的动力学行为,是理解光催化、光电转换、甚至量子计算基础过程的关键。含时密度泛函理论(TDDFT)是处理这类问题的“金标准”之一,它通过…...