软件I2C读写MPU6050代码
1、硬件电路

- SCL引到了STM32的PB10号引脚,SDA引到了PB11号引脚
- 软件I2C协议: 用普通GPIO口,手动反转电平实现协议,不需要STM32内部的外设资源支持,故端口是可以任意指定
- MPU605在SCL和SDA自带了两个上拉电阻,故不需要额外接上拉电阻
- AD0引脚:修改从机地址的最低位,其内置了下拉电阻,故引脚悬空时,相当于接地
- INT:中断信号输出引脚,没用到,不接
2、I2C部分代码解释
(1)发送字节
void MyI2C_SendByte(uint8_t Byte)
{//先把数据放到SDA上面,然后SCL先置1,再置零,将SDA上面的数据送出去uint8_t i;for (i = 0; i < 8; i ++){MyI2C_W_SDA(Byte & (0x80 >> i));//先去最高位MyI2C_W_SCL(1);//驱动时钟走一个脉冲MyI2C_W_SCL(0);}
}
- 除了终止条件,SCL以高电平结束,所有单元以低电平结束,方便各个单元的拼接
- 趁着SCL是低电平,先把数据放在SDA上,再MyI2C_W_SCL(1);MyI2C_W_SCL(0);
- SCL是原本是低电平,此时先高电平再低电平,使得SDA走一个时钟,读取SCL的数据
(2)读取字节
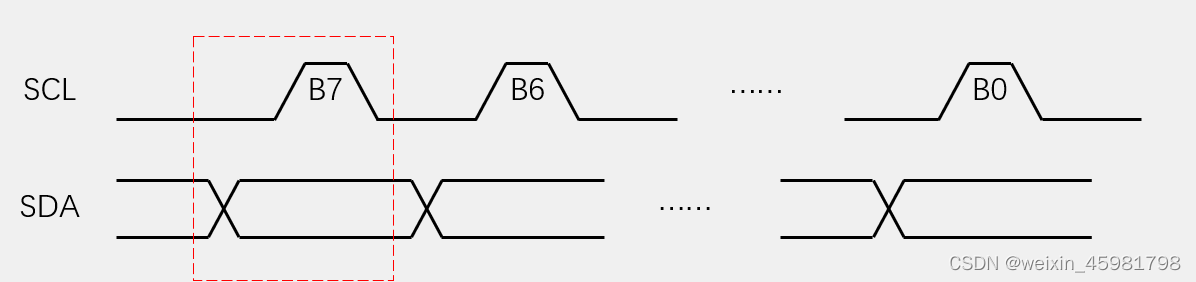
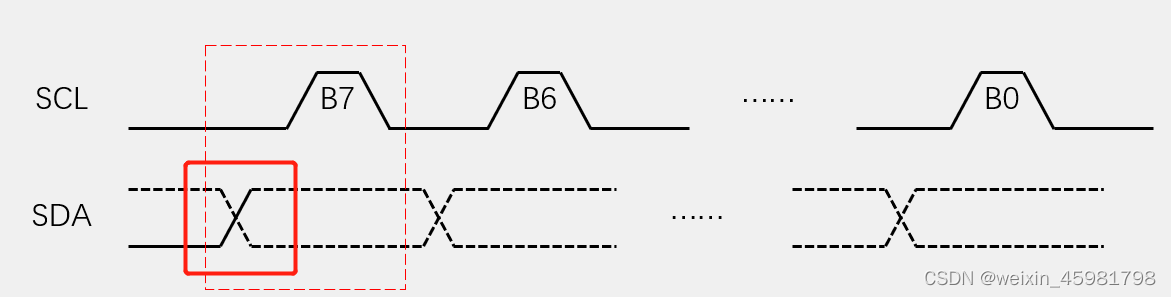
SCL低电平期间,从机将数据位依次放到SDA线上(高位先行)
uint8_t MyI2C_ReceiveByte(void)
{//SDA先置1,这个时候从机把第一个数据放到SDA上,然后SCL置1,读取从机的数据uint8_t i, Byte = 0x00;MyI2C_W_SDA(1);//主机释放SDA,从机把数据放到SDA,这时,主机释放SCL,SCL高电平,主机就能读取数据(高位先行)for (i = 0; i < 8; i ++){MyI2C_W_SCL(1);//SCL高电平,主机就可能读取数据了//置1之后读取SDA的数据if (MyI2C_R_SDA() == 1){Byte |= (0x80 >> i);}//如果不是高电平,就默认是写进0MyI2C_W_SCL(0);}return Byte;//把接收的字节放回过去
}
- 接收一个字节,开始时,SCL为低电平,从机把数据放在SDA,为了防止主机干扰从机写入数据
- 主机先释放SDA,释放SDA相当于切换为输入模式,故在SCL低电平时,从机会把数据放到SDA
- 如果从机想发1,就释放SDA,发0,拉低SDA,然后主机释放SCL,在SCL高电平期间,读取SDA
- 即在SCL为低电平的时候,SDA写入数据,等SCL释放时,读SDA数据,即为读写分离的方式
- 故在读写数据的时候,SCL是在SDA低电平的时候变化,在高电平的时候不变,
在起始和终止的时候,SCL是在SDA高电平的时候变化
(3)接收应答
- 函数进来时,SCL为低电平,主机释放SDA,防止干扰从机,同时从机把应答位放在SDA上,
- SCL高电平,主机读取应答位,SCL低电平,进入下一个时序单元
uint8_t MyI2C_ReceiveAck(void)
{//将SDA置1后,这个时候从机把应答位放在SDA上,这个时候只需要SCL置1,后置零,读取数据即可,记得是 //在SCL为高电平的时候读取数据,然后读取完之后SCL再置零uint8_t AckBit;MyI2C_W_SDA(1);MyI2C_W_SCL(1);AckBit = MyI2C_R_SDA();//此处不一定是1,MyI2C_W_SCL(0);return AckBit;
}
- AckBit = MyI2C_R_SDA();//此处不一定是1,
- 原因:I2C的引脚都是开漏输出+弱上拉配置,主机输出1,并不是强制SDA为高电平而是释放SDA
- I2C是在进行通信,主机释放SDA,从机在的情况下,有义务将SDA拉低,故读到0,代表从机给了应答,1则从机应答
3、MyI2C.c
#include "stm32f10x.h" // Device header
#include "Delay.h"//写SCL的函数
void MyI2C_W_SCL(uint8_t BitValue)
{GPIO_WriteBit(GPIOB, GPIO_Pin_10, (BitAction)BitValue);Delay_us(10);
}//写SDA的函数
void MyI2C_W_SDA(uint8_t BitValue)
{GPIO_WriteBit(GPIOB, GPIO_Pin_11, (BitAction)BitValue);Delay_us(10);
}//读SDA的函数
uint8_t MyI2C_R_SDA(void)//读
{uint8_t BitValue;BitValue = GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11);//读取SDA的线Delay_us(10);return BitValue;
}//MyI2C初始化
void MyI2C_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;//开漏输出模式(仍然可以输入,输入时,先输出1,再直接读取输入数据寄存器)GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);GPIO_SetBits(GPIOB, GPIO_Pin_10 | GPIO_Pin_11);//都为高电平,处于空闲状态
}//兼容起始条件和重复条件
void MyI2C_Start(void)
{MyI2C_W_SDA(1);//先确保释放数据线,再释放SCLMyI2C_W_SCL(1);MyI2C_W_SDA(0);//拉低数据线,触发通讯MyI2C_W_SCL(0);//拉低时钟线,方便数据线上的数据变化
}//终止条件
//确保释放的时候,能产生上升沿,需要先拉底数据线,后面在SCL是高电平的时候,再拉高SDA
void MyI2C_Stop(void)
{MyI2C_W_SDA(0);MyI2C_W_SCL(1);MyI2C_W_SDA(1);
}
//除了终止条件,SCL以高电平结束,所有单元以低电平结束,方便各个单元的拼接//发送一个字节的逻辑(以stm32为视角)
void MyI2C_SendByte(uint8_t Byte)
{uint8_t i;for (i = 0; i < 8; i ++){//除了终止条件,SCL以高电平结束,所有单元以低电平结束,方便各个单元的拼接//趁着SCL是低电平,先把数据放在SDA上,再让SDA走一个时钟MyI2C_W_SDA(Byte & (0x80 >> i));//先去最高位MyI2C_W_SCL(1);//驱动时钟走一个脉冲MyI2C_W_SCL(0);}
}//接收一个字节,开始时,SCL为低电平,从机把数据放在SDA,为了防止主机干扰从机写入数据
//主机先释放SDA,释放SDA相当于切换为输入模式,故在SCL低电平时,从机会把数据放到SDA
//如果从机想发1,就释放SDA,发0,拉低SDA,然后主机释放SCL,在SCL高电平期间,读取SDA
//即在SCL为低电平的时候,SDA写入数据,等SCL释放时,读SDA数据,即为读写分离的方式
//故在读写数据的时候,SCL是在SDA低电平的时候变化,在高电平的时候不变,
//在起始和终止的时候,SCL是在SDA高电平的时候变化
uint8_t MyI2C_ReceiveByte(void)
{uint8_t i, Byte = 0x00;MyI2C_W_SDA(1);//主机释放SDA,从机把数据放到SDA,这时,主机释放SCL,SCL高电平,主机就能读取数据(高位先行)for (i = 0; i < 8; i ++){MyI2C_W_SCL(1);//SCL高电平,主机就可能读取数据了if (MyI2C_R_SDA() == 1){Byte |= (0x80 >> i);}//如果不是高电平,就默认是写进0MyI2C_W_SCL(0);}return Byte;//把接收的字节放回过去
}//发送应答
//函数进来时,SCL为低电平,
void MyI2C_SendAck(uint8_t AckBit)
{MyI2C_W_SDA(AckBit);MyI2C_W_SCL(1);MyI2C_W_SCL(0);//进入下一个时序单元
}//接收应答
//函数进来时,SCL为低电平,主机释放SDA,防止干扰从机,同时,从机把应答位放在SDA上,
//SCL高电平,主机读取应答位,SCL低电平,进入下一个时序单元
uint8_t MyI2C_ReceiveAck(void)
{uint8_t AckBit;MyI2C_W_SDA(1);MyI2C_W_SCL(1);AckBit = MyI2C_R_SDA();//此处不一定是1,//原因:I2C的引脚都是开漏输出+弱上拉配置,主机输出1,并不是强制SDA为高电平而是释放SDA//I2C是在进行通信,主机释放SDA,从机在的情况下,有义务将SDA拉低,故读到0,代表从机给了应答,1则从机应答MyI2C_W_SCL(0);return AckBit;
}4、MPU6050.c 在这个代码当中写到了MPU读写寄存器等函数
#include "stm32f10x.h" // Device header
#include "MyI2C.h"
#include "MPU6050_Reg.h"#define MPU6050_ADDRESS 0xD0//基于I2C通信的模块,实现指定地址读、指定地址写,再实现写寄存器对芯片进行配置,读寄存器得到传感器数据//指定地址写
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{MyI2C_Start();MyI2C_SendByte(MPU6050_ADDRESS);MyI2C_ReceiveAck();//没有对应答位进行判断MyI2C_SendByte(RegAddress);MyI2C_ReceiveAck();//没有对应答位进行判断MyI2C_SendByte(Data);MyI2C_ReceiveAck();//没有对应答位进行判断MyI2C_Stop();
}//指定地址读
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{uint8_t Data;MyI2C_Start();MyI2C_SendByte(MPU6050_ADDRESS);MyI2C_ReceiveAck();MyI2C_SendByte(RegAddress);MyI2C_ReceiveAck();MyI2C_Start();MyI2C_SendByte(MPU6050_ADDRESS | 0x01);//读MyI2C_ReceiveAck();//若想要给多个数据,则用for循环接收,然后MyI2C_SendAck(0),最后再写1Data = MyI2C_ReceiveByte();MyI2C_SendAck(1);//1不给从机应答,0给从机应答(想读多个字节,给应答),如果在这里给了应答,那么从机就会源源不断发送数据MyI2C_Stop();return Data;//地址
}//目前的配置:解除睡眠、选择陀螺仪时钟,6个轴均不待机,采样分频为10
//滤波参数给最大,陀螺仪个加速度计都选择最大量程
void MPU6050_Init(void)
{MyI2C_Init();MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01);//电源管理寄存器1:翻手册:一位一位赋值,不复位,解除睡眠,不需要循环,温度传感器失能,001:选择x轴的螺旋仪时钟MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00);//电源管理寄存器2:00:不需要循环模式唤醒频率,后6位,每个轴的待机位,全部给0,不需要待机MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09);//10分频//采样率分频,这8位决定了数据的快慢,值越小越快,根据实际的需求来,MPU6050_WriteReg(MPU6050_CONFIG, 0x06);//配置寄存器:前两位:没用,第3位到5位:000不需要外部同步,最后三位:110,最平滑的数字低通滤波器MPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18);//陀螺仪配置寄存器:前面三位:自测使能,不自测;4、5位:满量程选择,11,选择最大量程,后面三位无关位MPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18);//加速度计配置寄存器:自测给000,满量程给最大量程11,用不到高通滤波器00
}uint8_t MPU6050_GetID(void)
{return MPU6050_ReadReg(MPU6050_WHO_AM_I);
}/*
获取数据
加速度传感器的输出数据(x轴y轴和z轴的加速度)
陀螺仪传感器的输出数据(x轴y轴和z轴的角速度)
改变MPU6050传感器的姿态,6个数据就会对应变化
*/
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{uint8_t DataH, DataL;DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);*AccX = (DataH << 8) | DataL;DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);*AccY = (DataH << 8) | DataL;DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);*AccZ = (DataH << 8) | DataL;DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);*GyroX = (DataH << 8) | DataL;DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);*GyroY = (DataH << 8) | DataL;DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);*GyroZ = (DataH << 8) | DataL;
}5、MPU6050_Reg.c
#ifndef __MPU6050_REG_H
#define __MPU6050_REG_H#define MPU6050_SMPLRT_DIV 0x19//采样率分频
#define MPU6050_CONFIG 0x1A//配置寄存器
#define MPU6050_GYRO_CONFIG 0x1B//陀螺仪配置寄存器
#define MPU6050_ACCEL_CONFIG 0x1C//加速度计配置寄存器#define MPU6050_ACCEL_XOUT_H 0x3B//加速度寄存器X轴的高8位
#define MPU6050_ACCEL_XOUT_L 0x3C//加速度寄存器X轴的低8位
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43//陀螺仪的x轴
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48#define MPU6050_PWR_MGMT_1 0x6B//电源管理寄存器1,地址是0x6B
#define MPU6050_PWR_MGMT_2 0x6C//电源管理寄存器2,地址是0x6B
#define MPU6050_WHO_AM_I 0x75#endif6、main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MPU6050.h"uint8_t ID;
int16_t AX, AY, AZ, GX, GY, GZ;
//写好I2C底层的GPIO初始化和6各时序基本单元
//起始、终止、发送一个字节、接受一个字节、发送应答和接收应答int main(void)
{OLED_Init();MPU6050_Init();OLED_ShowString(1, 1, "ID:");ID = MPU6050_GetID();OLED_ShowHexNum(1, 4, ID, 2);while (1){MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ);OLED_ShowSignedNum(2, 1, AX, 5);OLED_ShowSignedNum(3, 1, AY, 5);OLED_ShowSignedNum(4, 1, AZ, 5);OLED_ShowSignedNum(2, 8, GX, 5);OLED_ShowSignedNum(3, 8, GY, 5);OLED_ShowSignedNum(4, 8, GZ, 5);}
}7、从机地址
该设备中只有AD0一个引脚,故只有两个名字,若有AD0和AD1两个引脚,则有4个名字
最后一位为0,否则就是把控制权交出去
I2C从机地址:1101000(AD0=0)——>1101 0000 0xD0
1101001(AD0=1)——>1101 0010 0xD2
8、验证结果
将陀螺仪 放在水平位置上
显示屏读出的六个数据是
+00130 -00018
-00017 -00003
+01943 -00007
验证数据
配置的是量程最大的18g,故1943/32768=x/16g x=0.949g,接近1
把设备上倾,x轴正值,下倾,x轴负值
相关文章:
软件I2C读写MPU6050代码
1、硬件电路 SCL引到了STM32的PB10号引脚,SDA引到了PB11号引脚软件I2C协议: 用普通GPIO口,手动反转电平实现协议,不需要STM32内部的外设资源支持,故端口是可以任意指定MPU605在SCL和SDA自带了两个上拉电阻,…...

销售/回收DSOS254A是德keysight MSOS254A混合信号示波器
Agilent DSOS254A、Keysight MSOS254A、 混合信号示波器,2.5 GHz,20 GSa/s,4 通道,16 数字通道。 Infiniium S 系列示波器 信号保真度方面树立新标杆 500 MHz 至 8 GHz 出色的信号完整性使您可以看到真实显示的信号࿱…...

RIDGID里奇金属管线检测仪故障定位仪维修SR-20KIT
里奇RIDGID管线定位仪/检测仪/探测仪维修SR-20 SR-24 SR-60 美国里奇SeekTech SR-20管线定位仪对于初次使用定位仪的用户或经验丰富的用户,都同样可以轻易上手使用SR-20。SR-20提供许多设置和参数,使得大多数复杂的定位工作变得很容易。此外,…...
NodeJs之调试
关于调试 当我们只专注于前端的时候,我们习惯性F12,这会给我们带来安全与舒心的感觉。 但是当我们使用NodeJs来开发后台的时候,我想噩梦来了。 但是也别泰国担心,NodeJs的调试是很不方便!这是肯定的。 但是还好&…...
Java面试知识点(全)- Java并发-多线程JUC二-原子类/锁
Java面试知识点(全) 导航: https://nanxiang.blog.csdn.net/article/details/130640392 注:随时更新 JUC原子类 什么是CAS CAS的全称为Compare-And-Swap,直译就是对比交换。是一条CPU的原子指令,其作用是让CPU先进行比较两个值…...

CSS--移动web基础
01-移动 Web 基础 谷歌模拟器 模拟移动设备,方便查看页面效果 屏幕分辨率 分类: 物理分辨率:硬件分辨率(出厂设置)逻辑分辨率:软件 / 驱动设置 结论:制作网页参考 逻辑分辨率 视口 作用&a…...
Appuploader 常见错误及解决方法
转载:Appuploader 常见错误及解决方法 问题解决秘籍 遇到问题,第一个请登录苹果开发者官网 检查一遍账号是否有权限,是否被停用,是否过期,是否有协议需要同意,并且在右上角切换账号后检查所有关联的账号是否…...
消息通知之系统层事件发布相关流程
前言 Openharmony 3.1Release中存在消息通知的处理,消息通知包括系统层事件发布、消息订阅、消息投递与处理,为了开发者能够熟悉消息的处理流程,本篇文章主要介绍系统层事件发布的相关流程。 整体流程 代码流程 发布消息 { eventAction)w…...
Elsevier Ocean Engineering Guide for Authors 解读
文章目录 ★Types of contributions★Submission checklistEthics in publishing★Declaration of competing interestDeclaration of generative AI in scientific writingSubmission declaration and verificationPreprint posting on SSRNUse of inclusive languageReportin…...
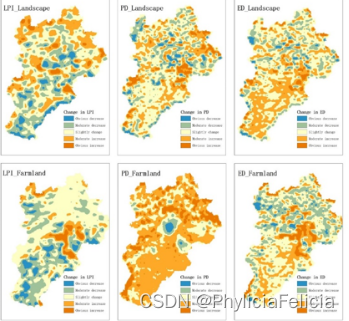
基于Fragstats的土地利用景观格局分析
土地利用以及景观格局是当前全球环境变化研究的重要组成部分及核心内容,其对区域的可持续发展以及区域土地管理有非常重要的意义。通过对土地利用时空变化规律进行分析可以更好的了解土地利用变化的过程和机制,并且通过调整人类社会经济活动,…...

ffmpeg-转码脚本02
ffmpeg-转码脚本详解 高级脚本 以下为主要部分 更高级优化要见git上 mkv转码电影脚本 ECHO OFF REM 以下参数不可乱填 SET FFMPEG%~DP0\ffmpeg.exe ::------------------------------------------------------------------------------ CALL:PRO_LOOPDIR ::CALL:PRO_LOOPDIR_SU…...

SharedPreferences
Android轻量级数据存储 import android.content.Context; import android.content.SharedPreferences;public class SharedPreferencesUtil {private SharedPreferences sharedPreferences;private SharedPreferences.Editor editor;public SharedPreferencesUtil(Context con…...
服务(第二十五篇)redis的优化和持久化
持久化的功能:Redis是内存数据库,数据都是存储在内存中,为了避免服务器断电等原因导致Redis进程异常退出后数据的永久丢失,需要定期将Redis中的数据以某种形式(数据或命令)从内存保存到硬盘;当下…...
David Silver Lecture 7: Policy Gradient
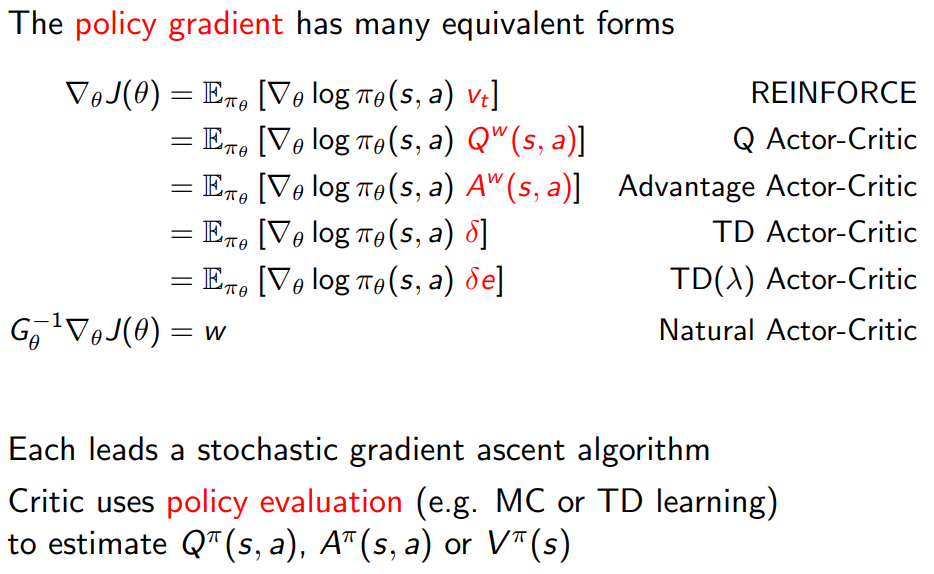
1 Introduction 1.1 Policy-Based Reinforcement Learning 1.2 Value-based and policy based RL 基于值的强化学习 在基于值的 RL 中,目标是找到一个最优的值函数,通常是 Q 函数或 V 函数。这些函数为给定的状态或状态-动作对分配一个值,表…...

知识图谱学习笔记——(五)知识图谱推理
一、知识学习 声明:知识学习中本文主体按照浙江大学陈华钧教授的《知识图谱》公开课讲义进行介绍,并个别地方加入了自己的注释和思考,希望大家尊重陈华钧教授的知识产权,在使用时加上出处。感谢陈华钧教授。 (一&…...

用vs2010编译和调试多个arx版本的arx项目
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、一级标题二级标题三级标题四级标题五级标题六级标题升级原先vs2008版本的项目文件到2010,或直接用vs2010新建一个arx项目; vs中查看项目属性:Project menu -> Properties,项目名上右…...

安全相关词汇
• DEW: Data Encryption Workshop • HSM: Hardware Security Module • KMS: Key Management System • KAM: Key Account Management • DHSM: Dedicated Hardware Security Module • KPS: Key Pair Service • CSMS: Cloud Secret Management Service • PCI-DSS: …...

最新入河排污口设置论证、水质影响预测与模拟、污水处理工艺分析及典型建设项目入河排污口方案报告书
随着水资源开发利用量不断增大,全国废污水排放量与日俱增,部分河段已远远超出水域纳污能力。近年来,部分沿岸入河排污口设置不合理,超标排污、未经同意私设排污口等问题逐步显现,已威胁到供水安全、水环境安全和水生态安全&#x…...

2023年认证杯二阶段C题数据合并python以及matlab多途径实现代码
对于每种心率下给出的数据,我们需要进行合并才能方便后续处理,这里为大家展示利用python以及matlab分别实现合并的代码 import pandas as pd import os# 创建一个空的DataFrame对象 merged_data pd.DataFrame()# 设置数据文件所在的文件夹路径 folder_…...
Win11校园网不弹出登录页面怎么回事?
Win11校园网不弹出登录页面怎么回事?最近有用户在使用校园网的时候遇到了一些问题,访问登录网站的时候,一直无法显示登录的界面。那么遇到这个情况如何去进行解决呢?一起来看看以下的解决方法分享吧。 解决方法如下: 方…...

ARM指令追踪技术及TRCVICTLR寄存器详解
1. ARM指令追踪技术概述在嵌入式系统开发和调试过程中,指令追踪(Instruction Trace)是一项至关重要的技术。它通过硬件机制记录处理器的执行流程,为开发者提供程序运行的完整轨迹。ARM架构从v7开始引入嵌入式跟踪宏单元࿰…...

物联网与云技术赋能咖啡后处理:CeriTech 的实时监控系统实践
1. 项目概述:用物联网与云技术重塑咖啡后处理在印尼的咖啡农场里,传统的发酵与干燥过程很大程度上依赖“感觉”和“经验”。一位有经验的农人可能会用手触摸、用鼻子闻,或者根据天气和日照时间来估算发酵是否完成、干燥是否均匀。这种方法固然…...

终极艾尔登法环帧率解锁指南:轻松突破60FPS限制
终极艾尔登法环帧率解锁指南:轻松突破60FPS限制 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirrors/el/EldenRing…...

科华UPS电源全品类汇总:选型与场景适配指南
科华UPS电源作为国内智慧电能领域的主流产品,覆盖家用、办公、机房、工业等全场景,产品系列丰富、规格齐全,但多数用户在选型时,常因分不清系列差异、功率适配、架构类型而踩坑。本文系统汇总科华UPS电源的核心分类、主流系列、核…...

uWSGI目录穿越漏洞CVE-2018-7490深度利用与防御实战
1. 这不是“读文件”那么简单:uWSGI目录穿越在真实攻防链中的定位与误判代价你刚在Vulfocus靶场里跑通了CVE-2018-7490的PoC,用curl "http://target:8080/?p../../../../etc/passwd"成功读出了root:x:0:0:root:/root:/bin/bash,截…...
)
别再只用鼠标了!用Leap Motion手势控制Unity游戏,保姆级配置避坑指南(2024版)
2024年Unity手势交互开发实战:Leap Motion从配置到游戏逻辑全解析在游戏开发领域,交互方式的创新往往能带来全新的体验。想象一下,玩家不再需要键盘鼠标,仅凭自然的手部动作就能操控游戏角色——这正是Leap Motion手势识别技术为U…...

在Node.js服务中集成Taotoken实现稳定的大模型能力调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Node.js服务中集成Taotoken实现稳定的大模型能力调用 对于需要在后端服务中集成AI功能的Node.js开发者而言,直接对接…...

超低功耗电池电压监控电路设计:从LM324到LPV324的硬件方案优化
1. 项目概述与核心需求解析在捣鼓各种电池供电的电子设备时,无论是自己做的无线传感器节点、便携式小工具,还是给孩子改装的玩具,有一个问题总是绕不开:你怎么知道电池快没电了?总不能每次都等到设备彻底罢工ÿ…...

如何让旧款Mac运行最新系统:OpenCore Legacy Patcher完整指南
如何让旧款Mac运行最新系统:OpenCore Legacy Patcher完整指南 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 想让你的老旧Mac设备重新焕发活力&a…...

3步搞定B站缓存视频转换:m4s转MP4的终极解决方案
3步搞定B站缓存视频转换:m4s转MP4的终极解决方案 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 你是否曾经在B站缓存了珍贵的视频&a…...