【ROS】ROS1工具详解
1、roscore
1.1 说明
运行roscore,将会启动三个功能:ROS Master主节点、ROS参数服务器和记录ROS日志输出节点
1.2 用法
roscore [可选参数]
1.3 参数详解
-
-h, --help,帮助信息
-
-p PORT, --port=PORT,指定端口号,默认是11311,如果指定了端口,需要设置环境变量ROS_MASTER_URI,让其它节点知道这个端口,例如: export ROS_MASTER_URI=http://YourPC:1234/
-
-v,打印详细信息 ,加上-v,启动时多了如下几行
… loading XML file [/opt/ros/melodic/etc/ros/roscore.xml]
… executing command param [rosversion roslaunch]
Added parameter [/rosversion]
… executing command param [rosversion -d]
Added parameter [/rosdistro]
Added core node of type [rosout/rosout] in namespace [/] -
-w NUM_WORKERS, --numworkers=NUM_WORKERS,自定义工作线程个数
-
-t TIMEOUT, --timeout=TIMEOUT,自定义socket连接超时时间,单位秒
-
–master-logger-level=MASTER_LOGGER_LEVEL设置日志等级(‘debug’, ‘info’, ‘warn’, ‘error’, ‘fatal’)
-
–sigint-timeout=SIGINT_TIMEOUT,使用SIGINT信号来杀死核心core的超时时间,单位秒
-
–sigterm-timeout=SIGTERM_TIMEOUT,使用SIGTERM信号来杀死核心core的超时时间,单位秒
2、rosrun
2.1 说明
rosrun先加载包,然后尝试在包里找可执行程序;如果找到了就运行这个可执行程序
2.2 用法
rosrun [--prefix cmd] [--debug] 包名 可执行程序 [可执行程序的参数]
2.3 参数详解
-
–debug,打印调试信息,例如在运行小乌龟时,添加–debug后,增加的信息如下:
$ rosrun --debug turtlesim turtlesim_node
[rosrun] Looking in catkin libexec dirs:
/opt/ros/melodic/lib/turtlesim
/opt/ros/melodic/share/turtlesim
[rosrun] Looking in rospack dir: /opt/ros/melodic/share/turtlesim
[rosrun] Searching for turtlesim_node with permissions /111
[rosrun] Running /opt/ros/melodic/lib/turtlesim/turtlesim_node -
–prefix,rosrun调用exec执行命令,例如使用gdb调试时
$ rosrun --prefix ‘gdb -ex run --args’ turtlesim turtle_teleop_key
GNU gdb (Ubuntu 8.1.1-0ubuntu1) 8.1.1
……
Use arrow keys to move the turtle. ‘q’ to quit.
Thread 1 “turtle_teleop_k” received signal SIGINT, Interrupt.
……
(gdb)
3、rostopic
3.1 说明
rostopic用来打印ROS的话题信息
例如:列出小乌龟的话题
~$ rostopic list
/rosout
/rosout_agg
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose
3.2 用法
rostopic后跟子命令,子命令如下:
- rostopic bw 按主题显示使用的带宽
- rostopic delay 显示主题相对于时间戳的延迟
- rostopic echo 将消息打印到屏幕
- rostopic find 按类型查找主题
- rostopic hz 显示主题的发布率
- rostopic info 打印有关活动主题的信息
- rostopic list 列出活动主题
- rostopic pub 将数据发布到主题
- rostopic type 打印主题或字段类型
3.3 参数详解
3.3.1 rostopic bw
- -h 打印帮助信息,下面的命令相同,不再赘述
- -w 设置统计次数,当超过这个次数后,就不再打印带宽信息,默认是100
3.3.2 rostopic delay
- -w 设置统计次数,当超过这个次数后,就不再打印延时信息,默认是100
- –tcpnodelay,使用TCP_NODELAY,禁用Nagle算法,Nagle算法的作用是减少小包的数量
3.3.3 rostopic echo
- -b BAGFILE, --bag=BAGFILE,从 .bag文件中获取信息
- -p,使用友好的格式打印
-w NUM_WIDTH,固定宽度的数值
–filter=FILTER-EXPRESSION,筛选信息
–nostr 不显示非字符串
–noarr 不现实数组
-c, --clear打印下一条时,先清理屏幕
-a, --all,显示.bag文件的所有信息,必须和-b一起使用
-n COUNT,显示指定个数的信息
–offset,显示和当前时间的偏移,单位秒
3.3.4 rostopic hz
用法:rostopic hz [options] /topic_0 [/topic_1 [topic_2 […]]]
参数:
- -w WINDOW, --window=WINDOW,统计屏率
- –filter=EXPR,过滤
- –wall-time使用现实时间
- –tcpnodelay,使用TCP_NODELAY,禁用Nagle算法,Nagle算法的作用是减少小包的数量
3.3.5 rostopic list
- -b BAGFILE, --bag=BAGFILE 列出在 .bag 中的主题
- -v, --verbose列出主题的详细信息
- -p,只列出发布者
- -s,只列出订阅者
- –host列出主机名
~$ rostopic list --host
Host [lesen-system-product-name]:/rosout/rosout_agg
3.3.6 rostopic pub
用法: rostopic pub /topic type [args…]
参数:
- -v,打印详细信息
- -r RATE, --rate=RATE,发布速率
- -1, --once ,发布一次然后退出
- -f FILE, --file=FILE,从YAML文件中读取
- -l, --latch,使能锁存
- -s, --substitute-keywords,添加关键字
- –use-rostime使用rostime作为时间戳,否则使用walltime(实际时间)
4、rosservice
4.1 说明
rosservice用来管理ROS本身的服务
4.2 用法
rosservice后跟子命令,子命令如下:
- rosservice args,打印服务参数
- rosservice call,使用提供的参数调用服务
- rosservice find,按服务类型查找服务
- rosservice info,打印有关服务的信息
- rosservice list,列出活动服务
- rosservice type,打印服务类型
- rosservice uri,打印服务ROSRPC的uri
5、rosnode
5.1 说明
rosnode用来打印节点信息
5.2 用法
rosnode后跟子命令,子命令如下:
- rosnode ping,测试是否能和节点ping通
- rosnode list,列出活跃的节点
- rosnode info,打印节点信息
- rosnode machine,列出在特定计算机上运行的节点
- rosnode kill,杀死指定的节点
- rosnode cleanup,清除无法访问节点的注册信息
6、rosparam
6.1 说明
rosparam用从ROS参数服务上获取、设置、删除参数
6.2 用法
rosparam后跟子命令,子命令如下:
- rosparam set,设置参数
- rosparam get,获取参数
- rosparam load,从文件中加载参数
- rosparam dump,将参数写入文件
- rosparam delete,删除参数
- rosparam list,列出所有参数的名字
7、rosmsg
7.1 说明
rosmsg用于显示ROS消息的信息
7.2 用法
rosmsg后跟子命令,子命令如下:
- rosmsg show,显示消息内容
- rosmsg info,列出消息的别名
- rosmsg list,列出所有的消息
- rosmsg md5,显示消息的md5值
- rosmsg package,列出指定包中的消息
- rosmsg packages,列出指定多个包中的消息
8、rossrv
8.1 说明
rossrv用于显示ROS的服务类型
8.2 用法
rossrv后跟子命令,子命令如下:
- rossrv show,显示服务描述
- rossrv info,显示服务别名
- rossrv list,列出所有的服务类型
- rossrv md5,显示服务类型md5值
- rossrv package,列出指定包的服务类型
- rossrv packages,列出指定多个包的服务类型
9、robbag
9.1 说明
bag是ROS中的一种文件格式,用于存储ROS消息数据。rosbag命令可以记录、回放和操作bag。
9.2 用法
robbag后跟子命令,子命令如下:
- robbag check,确定一个bag是否可以在当前系统中播放,或者是否可以迁移
- robbag compress,压缩一个或多个bag文件
- robbag decompress,解压缩一个或多个bag文件
- robbag decrypt,解密缩一个或多个bag文件
- robbag encrypt,加密缩一个或多个bag文件
- robbag filter,过滤bag里的指定内容
- robbag fix,修复bag文件中的消息,以便在当前系统中播放
- robbag info,总结一个或多个bag文件的内容
- robbag play,以时间同步的方式播放一个或多个bag文件的内容
- robbag record,记录指定主题的bag文件
- robbag reindex,重新索引一个或多个bag过滤器
10、rospack
10.1 说明
rospack用于查看包信息
10.2 用法
- -q,不输出错误报告
rospack后跟子命令,子命令如下:
- rospack cflags-only-I [–deps-only] [package]
- rospack cflags-only-other [–deps-only] [package]
- rospack depends [package] (alias: deps)
- rospack depends-indent [package] (alias: deps-indent)
- rospack depends-manifests [package] (alias: deps-manifests)
- rospack depends-msgsrv [package] (alias: deps-msgsrv)
- rospack depends-on [package]
- rospack depends-on1 [package]
- rospack depends-why --target= [package] (alias: deps-why)
- rospack depends1 [package] (alias: deps1)
- rospack export [–deps-only] --lang= --attrib= [package]
- rospack find [package]
- rospack langs
- rospack libs-only-L [–deps-only] [package]
- rospack libs-only-l [–deps-only] [package]
- rospack libs-only-other [–deps-only] [package]
- rospack list
- rospack list-duplicates
- rospack list-names
- rospack plugins --attrib= [–top=] [package]
- rospack profile [–length=] [–zombie-only]
- rospack rosdep [package] (alias: rosdeps)
- rospack rosdep0 [package] (alias: rosdeps0)
- rospack vcs [package]
- rospack vcs0 [package]
相关文章:

【ROS】ROS1工具详解
1、roscore 1.1 说明 运行roscore,将会启动三个功能:ROS Master主节点、ROS参数服务器和记录ROS日志输出节点 1.2 用法 roscore [可选参数]1.3 参数详解 -h, --help,帮助信息 -p PORT, --portPORT,指定端口号,默认…...

论Plant Simulation中的Init的使用及调用顺序
往期内容回顾: 一文搞懂Plant Simulation中的Rotation设置 Plant Simulation与python之Socket通信的数据交互问题 自主移动机器人模型制作 写在开头 在阅读之前,可以先尝试回答一下如下问题,如果都能答得上来,这篇文章就可以忽略不看了。 Q1:对于主模型中包括多…...
nginx实现正向代理
1.下载nginx nginx: download 选择自己需要的版版本下载下来 2.解压文件修改ngixn.conf配置文件 events { worker_connections 1024; } http { include mime.types; default_type application/octet-stream; sendfile on; keepalive_timeout…...

【spark】
实验5 Spark Structured Streaming编程实践 实验内容和要求 0.结构化流练习任务 0.1 讲义文件源-json数据任务。按照讲义中json数据的生成及分析,复现实验,并适当分析。 (1)创建程序生成JSON格式的File源测试数据 import osimp…...

ADO.NET 面试题
这里写自定义目录标题 什么是 ADO.NET?ADO.NET 的主要特点有哪些?ADO.NET 的四个组件分别是什么?什么是 Connection 串?Connection 的状态有哪些?什么是 DataAdapter?DataAdapter 的作用是什么?…...

第三篇、基于Arduino uno,用oled0.96寸屏幕显示dht11温湿度传感器的温度和湿度信息——结果导向
0、结果 说明:先来看看拍摄的显示结果,如果是你想要的,可以接着往下看。 1、外观 说明:本次使用的oled是0.96寸的,别的规格的屏幕不一定适用本教程,一般而言有显示白色、蓝色和蓝黄一起显示的࿰…...

什么是npu算力盒子,算力是越大越好吗?
一、什么是npu算力盒子?该怎么选? NPU(神经处理单元)算力盒子是一种专门用于进行人工智能计算的硬件设备,其中集成了高性能的NPU芯片。NPU是一种针对深度学习任务进行优化的处理器,具备高度并行计算和低功…...

后端返回文件流时,前端如何处理并成功下载流文件以及解决下载后打开显示不支持此文件格式
一、文件和流的关系 文件(File)和流(Stream)是既有区别又有联系的两个概念。 文件 是计算机管理数据的基本单位,同时也是应用程序保存和读取数据的一个重要场所。 存储介质:文件是指在各种存储介质上(如硬盘、可…...
Ansible的脚本-playbook 剧本
目录 1.剧本(playbook) 1.playbook介绍 2. playbooks 的组成 3.案例:编写httpd的playbook 4.定义、引用变量 5.指定远程主机sudo切换用户 6.when条件判断 7.迭代 2.playbook的模块 1.Templates 模块 2.tags 模块 3.Roles 模块 1.…...

python lambda表达式表达式详解及应用
目录 Python Lambda表达式的优势 Lambda表达式用法 1. 当作参数传递 2. 使用Lambda表达式过滤列表 3. 使用Lambda表达式计算数学表达式 4. 使用Lambda表达式作为返回值 5. 实现匿名回调函数 Lambda表达式注意事项 总结 Lambda表达式是Python中的一种匿名函数ÿ…...

Windows 10计算机性能优化:让你的电脑更流畅
Windows 10是目前最流行的操作系统之一,但在长期使用过程中,可能会出现一些性能方面的问题。本文将为你介绍如何选择合适的Windows 10版本,并提供一些优化技巧,使你的电脑性能更加流畅。此外,还将特别关注游戏用户和工…...

SpringMVC底层原理源码解析
SpringMVC的作用毋庸置疑,虽然我们现在都是用SpringBoot,但是SpringBoot中仍然是在使用SpringMVC来处理请求。 我们在使用SpringMVC时,传统的方式是通过定义web.xml,比如: <web-app><servlet><servle…...
【CSS系列】第八章 · CSS浮动
写在前面 Hello大家好, 我是【麟-小白】,一位软件工程专业的学生,喜好计算机知识。希望大家能够一起学习进步呀!本人是一名在读大学生,专业水平有限,如发现错误或不足之处,请多多指正࿰…...
janus videoroom 对接freeswitch conference 篇1
janus videoroom 实时性非常好, freeswitch conference的功能也很多 ,有没办法集成到一块呢 让很多sip 视频终端也能显示到videoroom 里面, 实现方式要不两种 1.改源码实现 (本文忽略 难度高) 2.找一个videoroom管…...
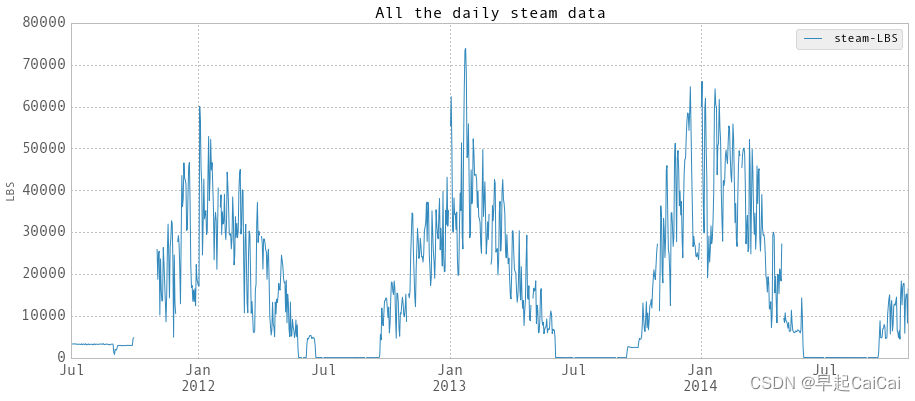
cs109-energy+哈佛大学能源探索项目 Part-2.1(Data Wrangling)
博主前期相关的博客见下: cs109-energy哈佛大学能源探索项目 Part-1(项目背景) 这次主要讲数据的整理。 Data Wrangling 数据整理 在哈佛的一些大型建筑中,有三种类型的能源消耗,电力,冷冻水和蒸汽。 冷冻…...
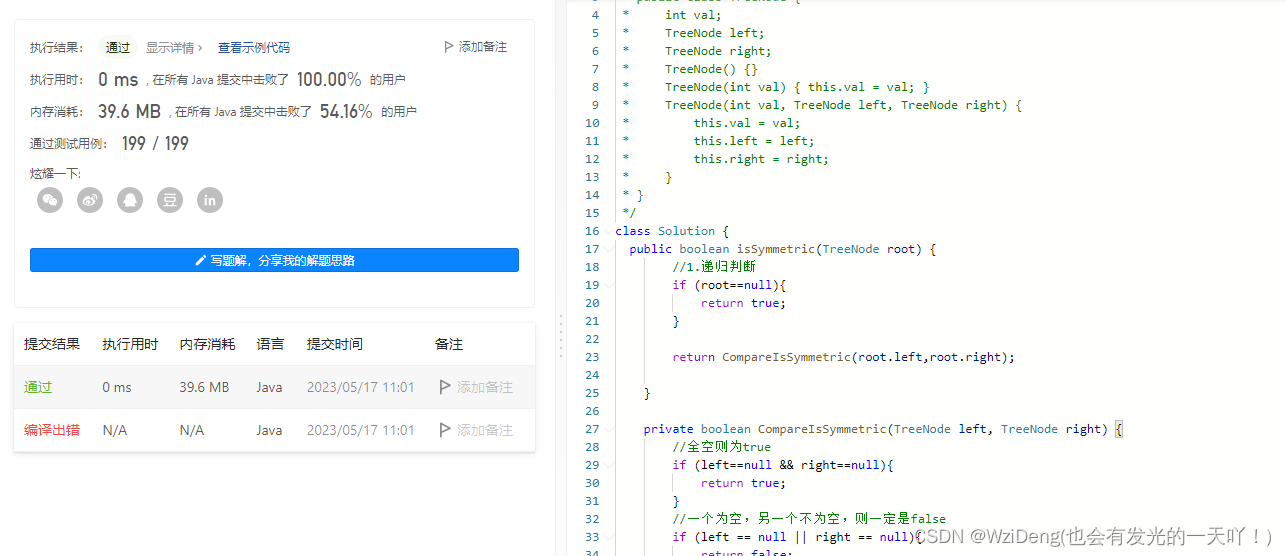
__101对称二叉树------进阶:你可以运用递归和迭代两种方法解决这个问题吗?---本题还没用【迭代】去实现
101对称二叉树 原题链接:完成情况:解题思路:参考代码: 原题链接: 101. 对称二叉树 https://leetcode.cn/problems/symmetric-tree/ 完成情况: 解题思路: 递归的难点在于:找到可以…...
怎么取消只读模式?硬盘进入只读模式怎么办?
案例:电脑磁盘数据不能修改怎么办? 【今天工作的时候,我想把最近的更新的资料同步到电脑上的工作磁盘,但是发现我无法进行此操作,也不能对磁盘里的数据进行改动。有没有小伙伴知道这是怎么一回事?】 在使…...

如何使用Java生成Web项目验证码
使用Java编写Web项目验证码 验证码是Web开发中常用的一种验证方式,可以防止机器恶意攻击。本文将介绍如何使用Java编写Web项目验证码,包括步骤、示例和测试。 步骤 1. 添加依赖 首先需要在项目中添加以下依赖: <dependency><groupId>com.google.code.kaptc…...

【读书笔记】《亲密关系》
作者:美国的罗兰米勒 刚拿到这本书的时候,就被最后将近100页的参考文献折服了,让我认为这本书极具专业性。 作者使用了14章,从人与人之间是如何相互吸引的,讲到如何相处与沟通,后又讲到如何面对冲突与解决矛…...

面试季,真的太狠了...
金三银四面试季的复盘,真的太狠了… 面试感受 先说一个字 是真的 “ 累 ” 安排的太满的后果可能就是一天只吃一顿饭,一直奔波在路上 不扯这个了,给大家说说面试吧,我工作大概两年多的时间,大家可以参考下 在整个面…...

对称与负电源测试:动态直流电子负载的设计、原理与应用
1. 项目概述:对称与负电源的静态与动态直流负载在电子实验室里,测试一个电源的性能,尤其是它的动态响应能力,是件既基础又关键的事。我们常说的“直流电子负载”就是这个领域的核心工具。我之前设计并分享过一个用于正电源测试的静…...

13456
12356...
做电影评论情感分类)
告别数据饥荒:用PyTorch手把手实现原型网络(Prototypical Networks)做电影评论情感分类
告别数据饥荒:用PyTorch手把手实现原型网络做电影评论情感分类 在自然语言处理领域,情感分析一直是热门研究方向,但现实中的开发者常面临一个尴尬困境:标注数据太少。传统深度学习方法动辄需要成千上万的标注样本,而实…...

什么情况下会核销贷款
贷款核销的核心前提是:贷款被认定为 “损失类” 且经 “穷尽追偿” 仍无法收回,银行按监管与会计规则从账面冲销,但债权不消灭、仍可追偿。一、核心认定条件(满足其一即可)破产 / 注销 / 吊销:借款人和担保…...

AI 如何改变软件工程:Martin Fowler 视角 + 实战洞见
AI 如何改变软件工程:Martin Fowler 视角 实战洞见 AI(尤其是 LLM)是软件工程自高级语言(从汇编到 C/Fortran)以来最大的转变。它引入了非确定性(Non-deterministic)编程,改变了从编…...

概率论:常见分布的期望与方差、中心极限定理、切比雪夫不等式
目录 一、0、1分布 二、二项分布 三、泊松分布 四、均匀分布 五、指数分布 六、正态分布 七、中心极限定理及其应用 (1)中心极限定理的定义 (2)使用示例 八、切比雪夫不等式 (1)切比雪夫不…...
)
内存申请和使用的场景分析(以AP->kernal->ISP为例)
在 ISP(Image Signal Processor)系统中,AP 与 ISP 之间的内存交互本质上是一个**“AP 申请可 DMA 访问的共享内存 → 内核建立映射 → 硬件寻址读写 → 同步与回收”**的过程。下面按数据流分层详细拆解。一、ISP 内存需求的特殊性 与普通应用…...

3分钟掌握抖音视频批量下载:解放双手的素材收集革命
3分钟掌握抖音视频批量下载:解放双手的素材收集革命 【免费下载链接】douyinhelper 抖音批量下载助手 项目地址: https://gitcode.com/gh_mirrors/do/douyinhelper 还在为一个个手动保存抖音视频而烦恼吗?想要高效收集创作者素材却苦于没有合适的…...

忆阻储层计算:预处理优化与硬件实现
1. 项目概述在当今人工智能快速发展的时代,神经形态计算正成为突破传统冯诺依曼架构瓶颈的重要方向。储层计算(Reservoir Computing,RC)作为一种特殊的循环神经网络架构,因其仅需训练输出层而显著降低了计算开销&#…...
HSTracker:macOS上炉石传说玩家的免费智能助手终极指南
HSTracker:macOS上炉石传说玩家的免费智能助手终极指南 【免费下载链接】HSTracker A deck tracker and deck manager for Hearthstone on macOS 项目地址: https://gitcode.com/gh_mirrors/hs/HSTracker 还在为炉石传说对战中记不住对手卡牌而烦恼吗&#x…...