STM32定时器实现红外接收与解码
1.NEC协议
红外遥控是一种比较常用的通讯方式,目前红外遥控的编码方式中,应用比较广泛的是NEC协议。NEC协议的特点如下:
- 载波频率为 38KHz
- 8位地址和 8位指令长度
- 地址和命令2次传输(确保可靠性)
- PWM 脉冲位置调制,以发射红外载波的占空比代表“0”和“1”
其逻辑1与逻辑0的表示如图所示:
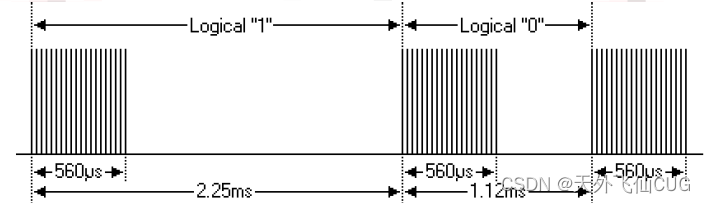
可以看到,逻辑1的位时间为2.25ms,脉冲时间560us;逻辑0的位时间为1.12ms,脉冲时间560us。
一个完整的NEC数据包如下:

首次发送的是9ms高电平+4.5ms低电平,为引导码。
接下来是8bit的地址码+8bit地址码的反码+8bit命令码+8bit命令码的反码。
以上是一个正常的数据包,但可能存在一种情况:当长按某个键时,发送的是以110ms为周期的重复码,如下图:

重复码由9ms高电平和2.25ms的低电平以及560us的高电平组成。
2.解码程序
在上面的图中可以看到,逻辑1和逻辑0的位时间是不同的,占空比也不同。所以我们可以根据位时间的长短来解码,也可以根据占空比的不同(1/2或1/4)来解码,或者二者同时作为解码条件。这里我们介绍根据位时间来解码。
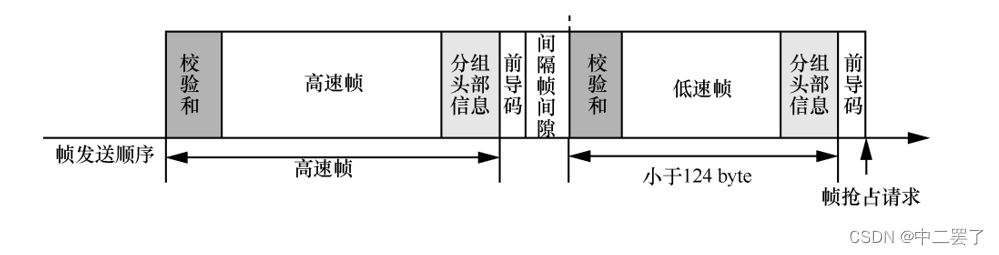
需要注意的是,很多红外一体接收头为了提高接受灵敏度。输入高电平,其输出的是相反的低电平。下图为示波器实际捕获的一组数据:
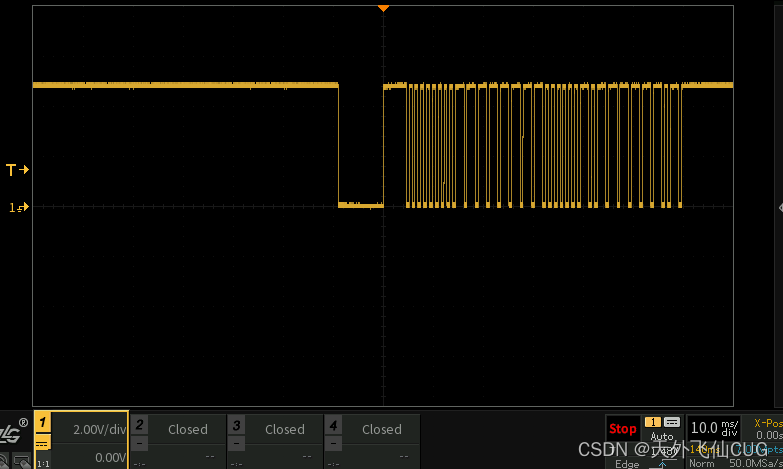
可以看到,空闲时为高电平,引导码为9ms低电平+4.5ms高电平。根据位时间解码的话,我们就不必关系高低电平各自的时间,只需关系总时间就行,即:引导码-13.5ms,逻辑1-2.25ms,逻辑0-1.12ms。
首先用STM32CubeMx配置定时器。系统时钟等的配置这里不在赘述,参考其它教程。
这里使用TIM3的Channel1作为捕获通道配置如下:
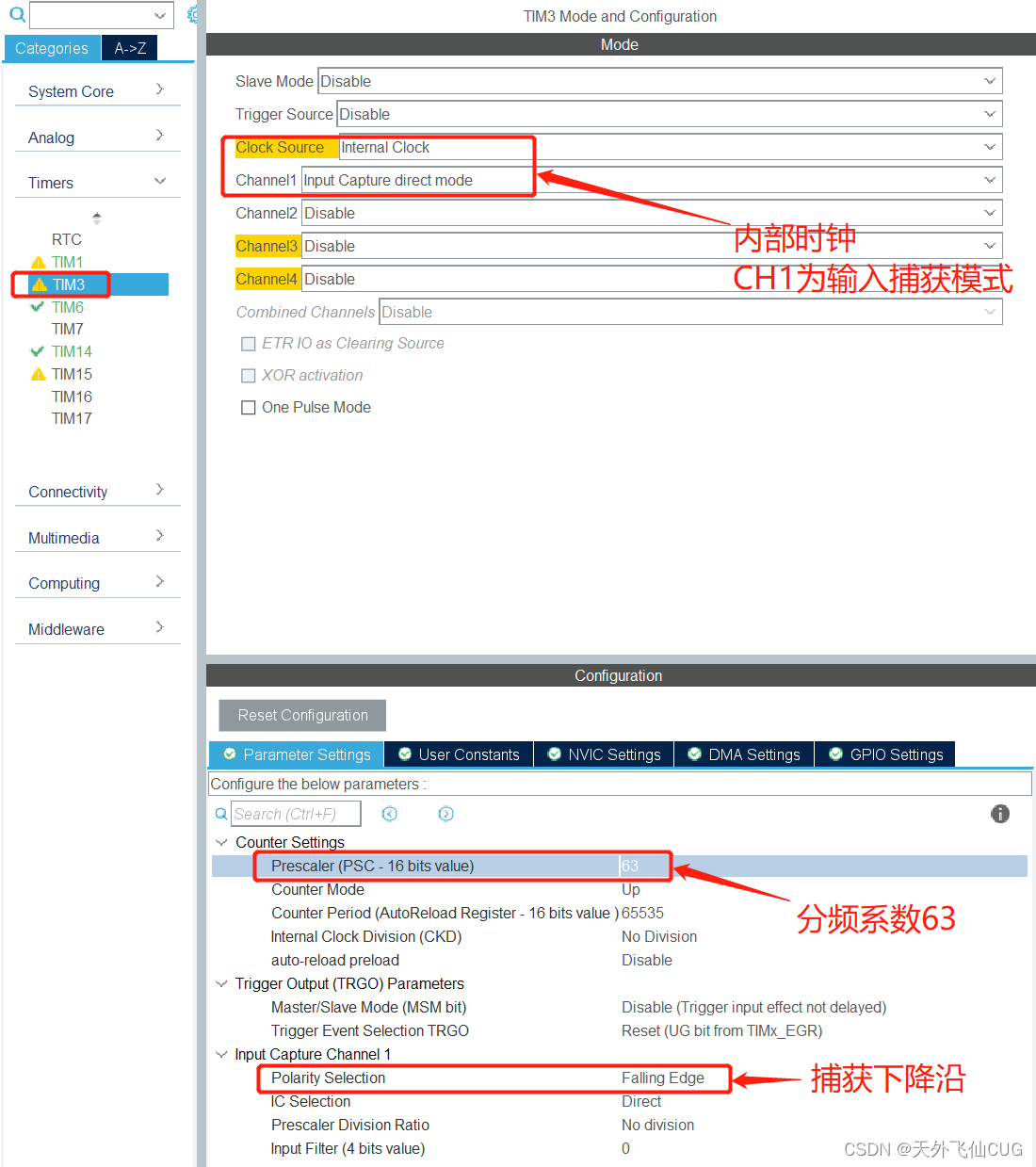
- 定时器时钟为内部时钟
- Channel1配置为输入捕获模式
- 分频系数为63,因为系统时钟为64M,这样定时器实际时钟为64/(63+1)=1M,主要是为了程序中方便计算。
- 捕获方式为下降沿捕获
- 最后别忘了打开定时器的中断

最后生成代码。在生成的TIM3中断函数中,屏蔽生成的中断处理还是,添加自己的解码程序如下:
uint32_t TIM3_Over_Cnt = 0;//tim3溢出次数
uint32_t TIM3_Sum_Cnt = 0;//两次下降沿之间的时间间隔
uint32_t cnt0 = 0;
uint8_t IR_Data[60];void TIM3_IRQHandler(void)
{/* USER CODE BEGIN TIM3_IRQn 0 *//* USER CODE END TIM3_IRQn 0 */
// HAL_TIM_IRQHandler(&htim3);/* USER CODE BEGIN TIM3_IRQn 1 */if(__HAL_TIM_GET_FLAG(&htim3, TIM_FLAG_UPDATE)) //定时器溢出中断{__HAL_TIM_CLEAR_FLAG(&htim3, TIM_FLAG_UPDATE); //清除中断标记TIM3_Over_Cnt++;}cnt0 = __HAL_TIM_GET_COUNTER(&htim3);TIM3_Sum_Cnt = (TIM3_Over_Cnt << 16) + cnt0;//获取计数器的值__HAL_TIM_SetCounter(&htim3,0);//清零重新计数TIM3_Over_Cnt = 0;//清零重新计数if (__HAL_TIM_GET_FLAG(&htim3, TIM_FLAG_CC1) != RESET)//TIM3CH1捕获中断{if(StartRevFlag == 1)//接收到引导码,开始解码{if(TIM3_Sum_Cnt > 36000)//大于36ms认为是结束{RevComplete = 1;//解码完成IR_Tick = 0;}else if(RevComplete == 0){if(TIM3_Sum_Cnt > 1000 && TIM3_Sum_Cnt < 1300)//1ms~1.3ms认为是低电平IR_Data[IR_Idx] = 0;else if(TIM3_Sum_Cnt > 2100 && TIM3_Sum_Cnt < 2400)//2.1ms~2.4ms认为是高电平IR_Data[IR_Idx] = 1;else //接收错误,重新开始StartRevFlag = 0;IR_Idx++;if(IR_Idx > 59)IR_Idx = 59;}}else{if(TIM3_Sum_Cnt > 13000 && TIM3_Sum_Cnt < 14000)//13~14ms引导码{StartRevFlag = 1;}IR_Tick = 0;RevComplete = 0;//解码完成标志置零IR_Idx = 0;//有效解码位TIM3_Over_Cnt = 0;TIM3_Sum_Cnt = 0;//定时器计数清零}__HAL_TIM_CLEAR_IT(&htim3, TIM_IT_CC1);}/* USER CODE END TIM3_IRQn 1 */
}解码程序根据每次捕获下降沿之间的间隔判断是引导码还是逻辑1或逻辑0。接收到引导码之后,再开始将解码的数据保存下来。最后通过也是时长来判断解码结束。这里没有判断重复码,有兴趣的小伙伴可以自己加上。
中断函数中,只是将每一位解码并保存,最后还需要在主程序中组合成字节并判断处理。
void IR_Rev()
{uint8_t num = IR_Idx / 8;uint8_t IRValue[8];if(RevComplete == 1 && StartRevFlag == 1 && IR_Tick > 20){if(num > 7)num = 7;for(uint8_t j=0;j<num;j++)//将每一位解码数据组合成字节数据{for(uint8_t i = 0;i< 8;i++){IRValue[j] = IRValue[j]>>1;if(IR_Data[j*8+i])IRValue[j] |= 0x80;}}if(IRValue[0] == 0x00 && IRValue[1] == 0xFF)//地址码正确{switch(IRValue[2])//判断数据码{case 0x46:KeyValue = S_key_Menu;break;case 0x43:KeyValue = S_key_Set;break;case 0x40:KeyValue = S_key_Rst;break;case 0x15:KeyValue = S_key_Down;break;case 0x09:KeyValue = S_key_Up;break;}}StartRevFlag = 0;RevComplete = 0;IR_Tick = 0;}
}
相关文章:
STM32定时器实现红外接收与解码
1.NEC协议 红外遥控是一种比较常用的通讯方式,目前红外遥控的编码方式中,应用比较广泛的是NEC协议。NEC协议的特点如下: 载波频率为 38KHz8位地址和 8位指令长度地址和命令2次传输(确保可靠性)PWM 脉冲位置调制&#…...
18- Adaboost梯度提升树 (集成算法) (算法)
Adaboost 梯度提升树: from sklearn.ensemble import AdaBoostClassifier model AdaBoostClassifier(n_estimators500) model.fit(X_train,y_train) 1、Adaboost算法介绍 1.1、算法引出 AI 39年(公元1995年),扁鹊成立了一家专治某疑难杂症…...
zlink 介绍
zlink 是一个基于 flink 开发的分布式数据开发工具,提供简单的易用的操作界面,降低用户学习 flink 的成本,缩短任务配置时间,避免配置过程中出现错误。用户可以通过拖拉拽的方式实现数据的实时同步,支持多数据源之间的…...

C++之std::string的resize与reverse
std::string的resize与reverse前言1.resize2.reserve前言 在C中我们经常用std::string 来保存字符串,其中有两个比较常用但是却平时容易被搞混的两个函数,分别是resize和reserve,模糊意识里,这两个方法都是对std::string的容量或元…...

在.net中运用ffmpeg 操作视频
using System;using System.Collections.Generic;using System.Diagnostics;using System.IO;using System.Text;namespace learun.util{/// <summary>/// ffmpeg视频相关处理的类/// </summary>public class FFmpegUtil{public static int Run(string cmd){try{//…...
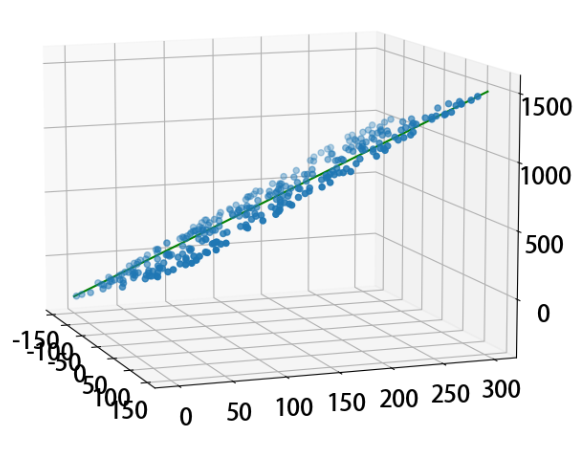
05- 线性回归算法 (LinearRegression) (算法)
线性回归算法(LinearRegression)就是假定一个数据集合预测值与实际值存在一定的误差, 然后假定所有的这些误差值符合正太分布, 通过方程求这个正太分布的最小均值和方差来还原原数据集合的斜率和截距。当误差值无限接近于0时, 预测值与实际值一致, 就变成了求误差的极小值。 fr…...

JAVA补充知识01之枚举enum
目录 1. 枚举类的使用 1.1 枚举类的理解 1.2 举例 1.3 开发中的建议: 1.4 Enum中的常用方法 1.5 熟悉Enum类中常用的方法 1.6 枚举类实现接口的操作 1.7 jdk5.0之前定义枚举类的方式 (了解即可) 1.8 jdk5.0之后定义枚举类的方式 1…...
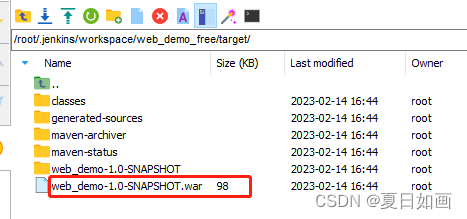
jenkins下配置maven
1. 先在jenkins服务器上安装maven 下载-解压-重命名-启动 [rootVM-0-12-centos local]# wget https://mirrors.aliyun.com/apache/maven/maven-3/3.9.0/binaries/apache-maven-3.9.0-bin.tar.gz [rootVM-0-12-centos local]# tar xf apache-maven-3.9.0-bin.tar.gz [rootVM-0…...

春季开学即将到来!大学生活必备数码清单奉上
马上就要开学了,你的返校装备是否已经准备齐全了呢?对于高校学生来说,很多数码产品都属于必备装备,比如下面这几款产品就受到了大量年轻消费者的喜爱,在它们的帮助下能够让大家的学习时光变得更快乐。1、不入耳黑科技骨…...

ubuntu18.04 天选2 R95900hx 3060显卡驱动安装
天选2 R95900hx 3060显卡驱动安装需求问题解决内核集显显卡驱动需求 外接显示器,安装nvidia驱动 问题 由于一开始直接在软件和更新中附加读懂安装了nvidia-470,导致系统黑屏。 解决 grub页面系统选择进入ubuntu recovery模式,选择root&a…...
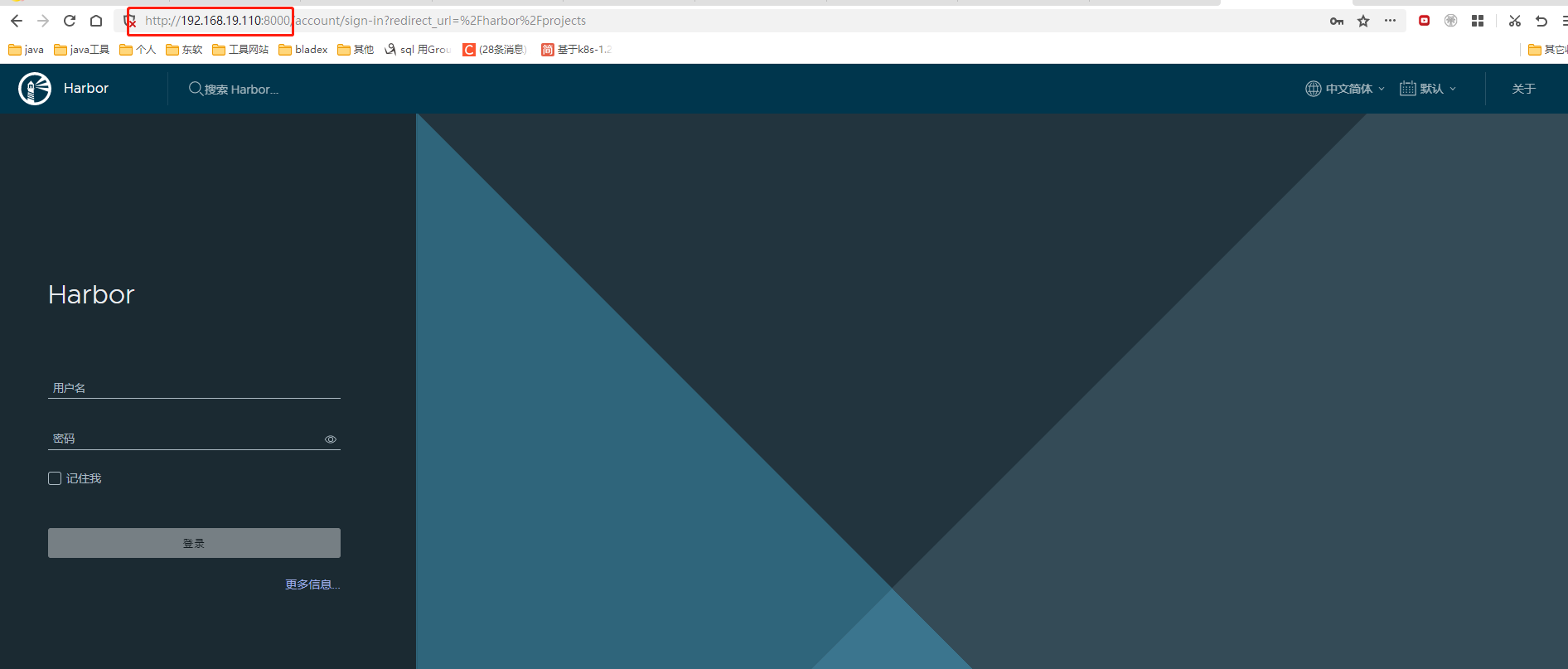
Harbor安装部署实战详细手册
文章目录前言一、安装docker二、安装docker-compose1.下载2.赋权3.测试三、安装harbor1.下载2.解压3.修改配置文件4.部署5.配置开机自启动6.登录验证7.补充说明四、harbor使用问题1.docker login问题:Error response from daemon: Get https://: http: server gave …...
)
华为OD机试真题JAVA实现【箱子之形摆放】真题+解题思路+代码(20222023)
🔥系列专栏 华为OD机试(JAVA)真题目录汇总华为OD机试(Python)真题目录汇总华为OD机试(C++)真题目录汇总华为OD机试(JavaScript)真题目录汇总文章目录 🔥系列专栏题目输入输出描述示例一输入输出说明备注解题思路Code运行结果版权说明...
| 真题+思路+考点+代码+岗位)
华为OD机试 - 事件推送(Python)| 真题+思路+考点+代码+岗位
事件推送 题目 同一个数轴 X 上有两个点的集合 A={A1, A2, …, Am} 和 B={B1, B2, …, Bn}, Ai 和 Bj 均为正整数,A、B 已经按照从小到大排好序,A、B 均不为空, 给定一个距离 R (正整数), 列出同时满足如下条件的所有(Ai, Bj)数对: Ai <= BjAi, Bj 之间的距离小于…...

【Linux】信号量
🎇Linux: 博客主页:一起去看日落吗分享博主的在Linux中学习到的知识和遇到的问题博主的能力有限,出现错误希望大家不吝赐教分享给大家一句我很喜欢的话: 看似不起波澜的日复一日,一定会在某一天让你看见坚持…...

android-java同步方法和异步方法
接口 Java接口是一系列方法的声明,是一些方法特征的集合,一个接口只有方法的特征没有方法的实现,因此这些方法可以在不同的地方被不同的类实现,而这些实现可以具有不同的行为(功能)。 两种含义:…...
:请求和响应)
Flask入门(5):请求和响应
目录5.请求和响应5.1 请求5.2 响应5.请求和响应 5.1 请求 request对象封装解析了请求报文中的数据,其大部分功能是由依赖包werkzeug完成的,并且每个request对象都是线程隔离的,保证了数据的安全性。 request对象的属性 1.request.method …...
记进组后第五次组会汇报
2023年2月14日 日记一、小组组会二、实验室组会1、汇报内容(1)参考文献(2)CQF机制a.研究现状b.相关思考(3)研究计划2、汇报反馈一、小组组会 上午十点整,小组组会开始,有两个同学我…...
)
nil Foundation的Placeholder证明系统(2)
前序博客: nil Foundation的Placeholder证明系统(1) nil; Foundation团队2022年11月论文《Placeholder证明系统》。[2022年11月29日版本] 8. 优化 8.1 Batched FRI 不同于单独检查每个commitment,可对其进行FRI聚合。如对多项…...
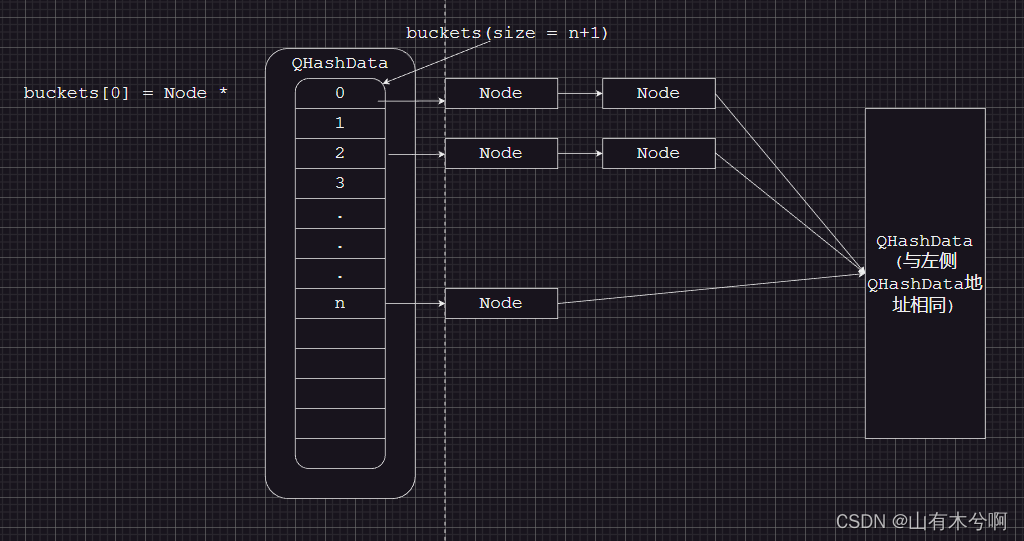
QHash源码解读
QT版本 v5.12.10 元素 // 重点说明QHashData的函数,QHashData是QHash的基础 struct QHashData {struct Node {Node *next;uint h;};Node *fakeNext; // 永为nullNode **buckets; // Node *数组QtPrivate::RefCount ref;int size; // node个数int nodeSize; /…...

【Unity细节】RigidBody中Dynamic和Kinematic的区别
👨💻个人主页:元宇宙-秩沅 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 本文由 秩沅 原创 收录于专栏:unity细节和bug ⭐Dynamic和Kinematic的区别⭐ 文章目录⭐Dynamic和Kinematic的区别⭐dz…...

VideoAgentTrek-ScreenFilter项目依赖管理:.NET生态下的客户端封装库开发
VideoAgentTrek-ScreenFilter项目依赖管理:.NET生态下的客户端封装库开发 最近在做一个视频处理相关的项目,需要频繁调用VideoAgentTrek-ScreenFilter的HTTP API。每次调用都得手动拼装HTTP请求、处理序列化、解析响应,代码里到处都是重复的…...

零基础部署Ostrakon-VL-8B:用Chainlit前端,轻松实现智能图片分析
零基础部署Ostrakon-VL-8B:用Chainlit前端,轻松实现智能图片分析 1. 为什么你需要Ostrakon-VL-8B? 想象一下,你经营着一家连锁便利店,每天需要检查几十家门店的商品陈列、价格标签和卫生状况。传统方法是让店长拍照发…...

嘎嘎降AI使用教程:手把手教你用嘎嘎降AI降论文ai率,从97%降到7%实操
嘎嘎降AI使用教程:手把手教你用嘎嘎降AI降论文ai率,从97%降到7%实操 说实话,我当时论文被检测出AI率97%的时候,整个人是懵的。导师直接把报告甩给我说"你这论文是不是全让AI写的",我那叫一个尴尬。后来折腾了…...

JavaScript DXF文件生成:在浏览器中创建CAD图纸的终极方案
JavaScript DXF文件生成:在浏览器中创建CAD图纸的终极方案 【免费下载链接】js-dxf JavaScript DXF writer 项目地址: https://gitcode.com/gh_mirrors/js/js-dxf 你是否需要在Web应用中集成工程图纸生成功能?JavaScript DXF文件生成库为你提供了…...
)
从4G到Wi-Fi:一文拆解VoLTE、ViLTE与VoWiFi的核心差异与切换实战(附配置要点)
从4G到Wi-Fi:VoLTE、ViLTE与VoWiFi技术全景解析与实战指南 在移动通信技术快速迭代的今天,高清语音和视频通话已成为用户体验的核心指标。VoLTE、ViLTE和VoWiFi作为三种主流的IMS(IP多媒体子系统)通信技术,正在重塑现代…...

告别环境配置!M2FP镜像开箱即用,快速体验人体语义分割
告别环境配置!M2FP镜像开箱即用,快速体验人体语义分割 1. 为什么选择M2FP镜像 1.1 人体语义分割的实用价值 人体语义分割是计算机视觉领域的重要技术,它能将图像中的人体细分为不同部位(如头部、上衣、裤子等)。这项…...
)
4个免费开源工具帮你省下OpenAI Deep Research的200美元月费(附详细配置指南)
4款开源工具实现专业级AI研究:零成本替代OpenAI Deep Research全攻略 当OpenAI推出Deep Research功能时,许多研究者和开发者的眼睛都亮了——自动完成复杂研究任务、整合海量信息并生成专业报告的能力,正是知识工作者的梦想工具。但每月200美…...

如何让Windows 11运行如飞?Win11Debloat系统优化工具全解析
如何让Windows 11运行如飞?Win11Debloat系统优化工具全解析 【免费下载链接】Win11Debloat 一个简单的PowerShell脚本,用于从Windows中移除预装的无用软件,禁用遥测,从Windows搜索中移除Bing,以及执行各种其他更改以简…...

从逗号到标签:用React 19 + TailwindCSS V4构建智能选项解析器
1. 为什么需要智能标签解析器? 在日常开发中,我们经常遇到这样的场景:用户需要输入多个选项,比如商品标签、兴趣关键词或者任务分类。传统做法是让用户手动输入每个标签后按回车,这种体验既笨拙又低效。而一个优秀的智…...

Qwen3-Embedding-4B开箱即用:SGlang部署避坑指南
Qwen3-Embedding-4B开箱即用:SGlang部署避坑指南 1. Qwen3-Embedding-4B简介 Qwen3-Embedding-4B是Qwen系列最新推出的文本嵌入模型,专为语义检索、文本分类等任务优化。作为4B参数量的中型模型,它在效果与效率之间取得了良好平衡ÿ…...