STM32队列
目录
什么是队列?
队列特点
1. 数据入队出队方式
2. 数据传递方式
3. 多任务访问
4. 出队、入队阻塞
队列相关 API 函数
1. 创建队列
参数:
2. 写队列
参数:
返回值:
3. 读队列
参数:
返回值:
实操
实验需求
cubeMX配置
代码实现
什么是队列?
队列特点
1. 数据入队出队方式
2. 数据传递方式
3. 多任务访问
4. 出队、入队阻塞
当任务向一个队列发送消息时,可以指定一个阻塞时间,假设此时当队列已满无法入队。
- 0:直接返回不会等待;
- 0~port_MAX_DELAY:等待设定的阻塞时间,若在该时间内还无法入队,超时后直接返回不
- 再等待;
- port_MAX_DELAY:死等,一直等到可以入队为止。出队阻塞与入队阻塞类似;
队列相关 API 函数
1. 创建队列
QueueHandle_t xQueueCreate ( UBaseType_t uxQueueLength , UBaseType_t uxItemSize );
参数:
2. 写队列
| 函数 | 描述 |
| xQueueSend() | 往队列的尾部写入消息 |
| xQueueSendToBack() | 同 xQueueSend() |
| xQueueSendToFront() | 往队列的头部写入消息 |
| xQueueOverwrite() | 覆写队列消息(只用于队列长度为 1 的情况) |
| xQueueSendFromISR() | 在中断中往队列的尾部写入消息 |
| xQueueSendToBackFromISR() | 同 xQueueSendFromISR() |
| xQueueSendToFrontFromISR() | 在中断中往队列的头部写入消息 |
| xQueueOverwriteFromISR() | 在中断中覆写队列消息(只用于队列长度为 1 的情况) |
BaseType_t xQueueSend (QueueHandle_t xQueue ,const void * pvItemToQueue ,TickType_t xTicksToWait);
参数:
- xQueue:队列的句柄,数据项将发送到此队列。
- pvItemToQueue:待写入数据
- xTicksToWait:阻塞超时时间
返回值:
3. 读队列
| 函数 | 描述 |
| xQueueReceive() | 从队列头部读取消息,并删除消息 |
| xQueuePeek() | 从队列头部读取消息,但是不删除消息 |
| xQueueReceiveFromISR() | 在中断中从队列头部读取消息,并删除消息 |
| xQueuePeekFromISR() | 在中断中从队列头部读取消息 |
BaseType_t xQueueReceive (QueueHandle_t xQueue ,void * pvBuffer ,TickType_t xTicksToWait);
参数:
- xQueue:待读取的队列
- pvItemToQueue:数据读取缓冲区
- xTicksToWait:阻塞超时时间
返回值:
实操
实验需求
cubeMX配置

代码实现
freertos.c
void StartTaskSend(void const * argument)
{/* USER CODE BEGIN StartTaskSend */uint16_t buf = 100;BaseType_t status;/* Infinite loop */for(;;){if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET){osDelay(20);if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET){ status = xQueueSend(myQueueHandle, &buf, 0);if (status == pdTRUE)printf("写入队列成功,写入值为%d\r\n", buf);elseprintf("写入队列失败\r\n");}while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET);
}
osDelay(10);}/* USER CODE END StartTaskSend */
}/* USER CODE BEGIN Header_StartTaskReceive */
/**
* @brief Function implementing the taskReceive thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTaskReceive */
void StartTaskReceive(void const * argument)
{/* USER CODE BEGIN StartTaskReceive */uint16_t buf;BaseType_t status;/* Infinite loop */for(;;){if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET){osDelay(20);if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET){status = xQueueReceive(myQueueHandle, &buf, 0);if (status == pdTRUE)printf("队列数据读取成功,读出值为%d\r\n", buf);elseprintf("队列读取失败\r\n");}while (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET);}osDelay(10);}/* USER CODE END StartTaskReceive */
}/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application *//* USER CODE END Application */
相关文章:
STM32队列
目录 什么是队列? 队列特点 1. 数据入队出队方式 2. 数据传递方式 3. 多任务访问 4. 出队、入队阻塞 队列相关 API 函数 1. 创建队列 参数: 2. 写队列 参数: 返回值: 3. 读队列 参数: 返回值…...
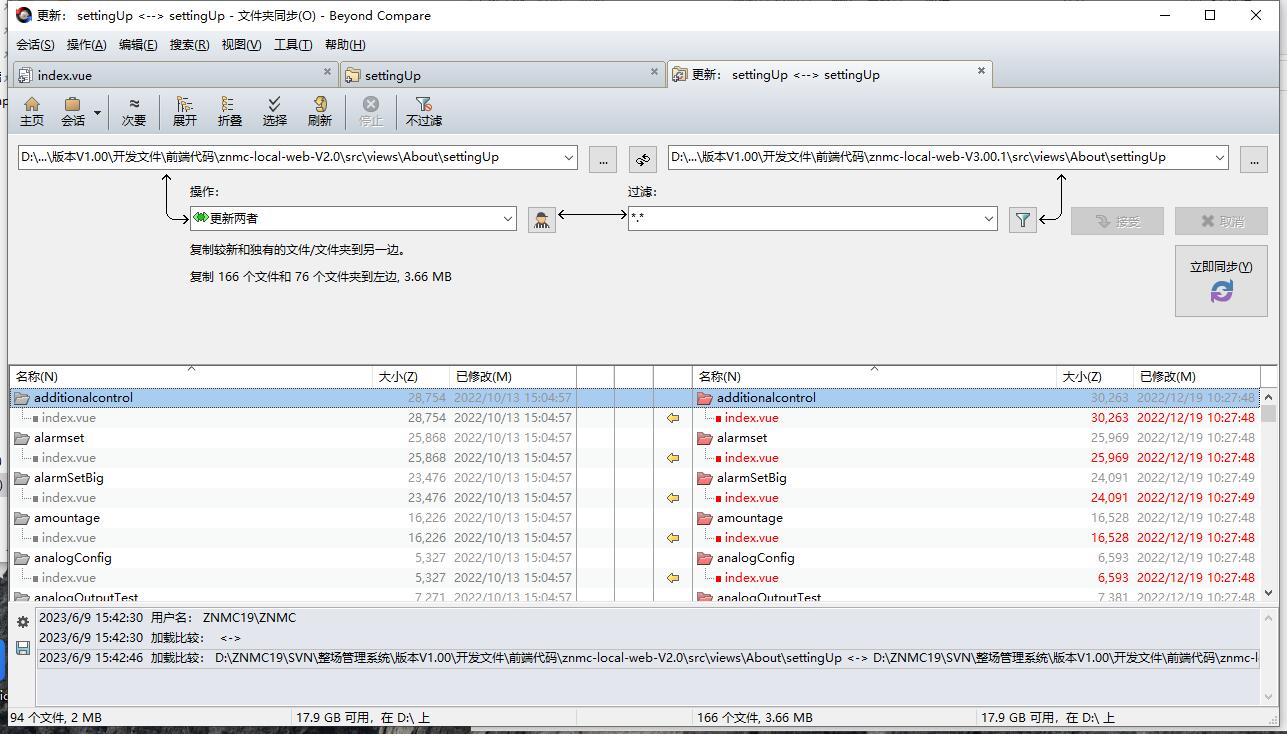
探索Beyond Compare:让文件比较和管理变得简单高效
在这个信息爆炸时代,我们的日常生活和工作中需要处理大量的数据和文档。在这个过程中,有时候我们会面临找出不同文件之间的差异、合并重复内容等需求。那么,有没有一款软件可以帮助我们轻松地完成这些任务呢?答案当然是肯定的&…...
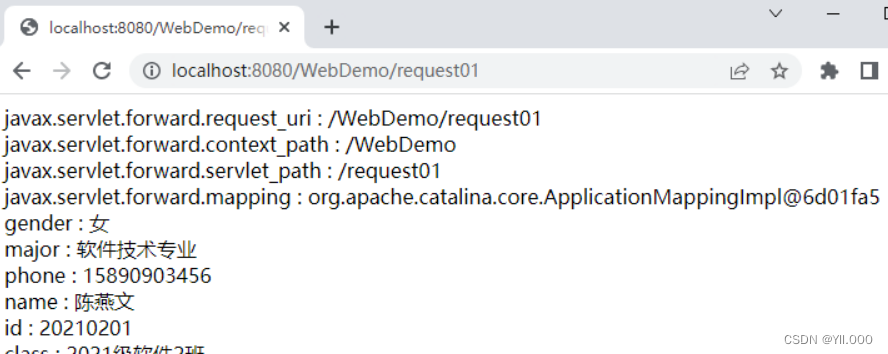
动态网站Servelt基础
文章目录 一、Servlet基础(一)Servlet概述1、Servlet是什么2、Servlet容器3、Servlet应用程序的体系结构 (二)Servlet的特点1、功能强大2、可移植3、性能高效4、安全性高5、可扩展 (三)Servlet接口1、Servl…...

Docker 网络
Docker 网络实现原理 Docker使用Linux桥接,在宿主机虚拟一个Docker容器网桥(docker0),Docker启动一个容器时会根据Docker网桥的网段分配给容器一个IP地址,称为Container-IP,同时Docker网桥是每个容器的默认网关。因为在同一宿主机…...
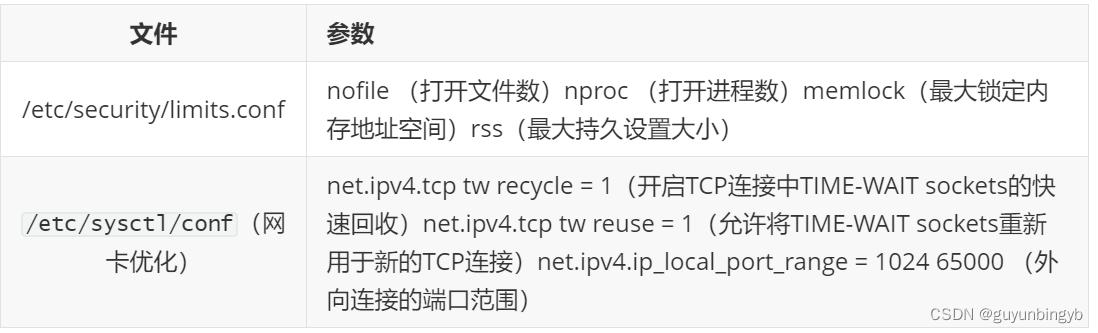
Tomcat的优化
Tomcat的优化 一、Tomcat 优化Tomcat 配置文件参数优化 二、系统内核优化三、Tomcat 配置 JVM 参数:参数含义 一、Tomcat 优化 Tomcat默认安装下的缺省配置并不适合生产环境,它可能会频繁出现假死现象需要重启,只有通过不断压测优化才能让它…...

一个问题来对比文心一言和chatgpt
问题: 请注意, 孩子不会说话,他无法用语言来回复妈妈的问题, 请生成以下剧本:一个妈妈和一岁不会说话的婴儿的日常vlog的剧本 文心一言 场景一:早晨 (妈妈和孩子在客厅里醒来) 妈妈&…...
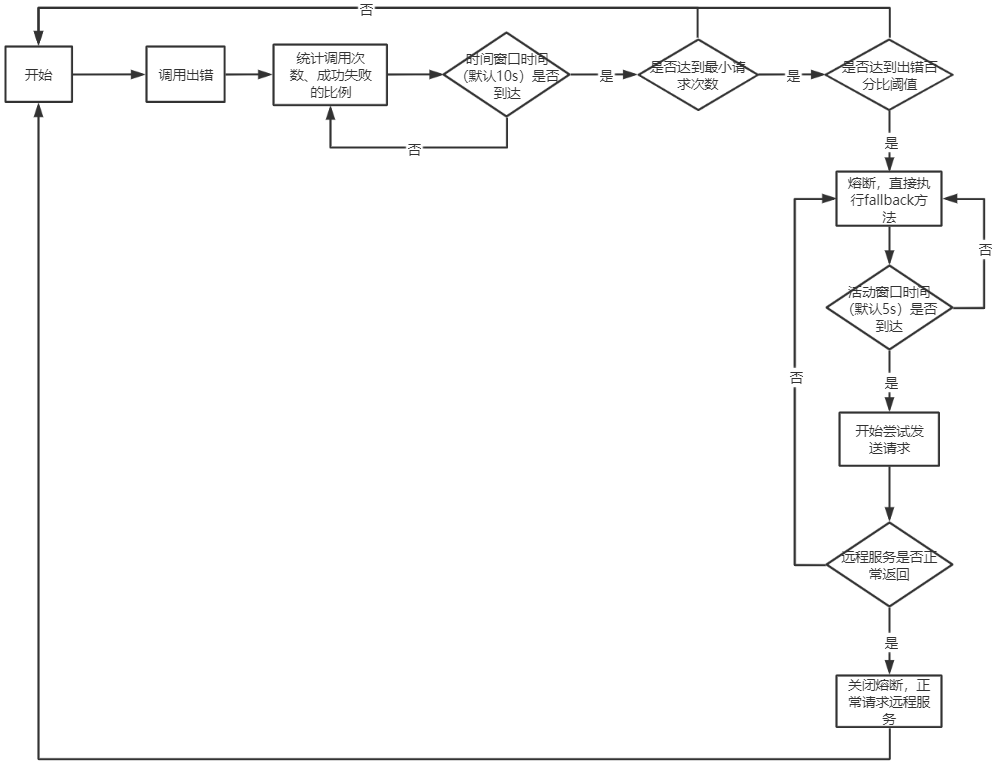
防雪崩利器之Hystrix
Hystrix作为一个容错组件,本文从它的作用、熔断设计、工作流程和应用方面一一道来,帮助大家了解如何使用。 1、什么是灾难性雪崩效应 要讲Hystrix,我们就要讲一种场景,在微服务架构中,如果底层服务出现故障࿰…...
)
机器学习复习(上)
严正声明:本文的答案是ChatGPT的回答,仅供参考,不代表就是正确答案!!! 1.解释什么是过拟合和欠拟合,如何降低过拟合? 过拟合(overfitting)指的是一个模型在训练数据上表…...

node笔记_express结合formidable实现前后端的文件上传
文章目录 ⭐前言⭐安装http请求的文件解析依赖库💖 安装 formidable💖 node formidable接受formData上传参数 ⭐上传的页面搭建💖 vue2 element upload💖 node 渲染 上传文件 ⭐后端生成api上传文件到指定目录💖完整的…...
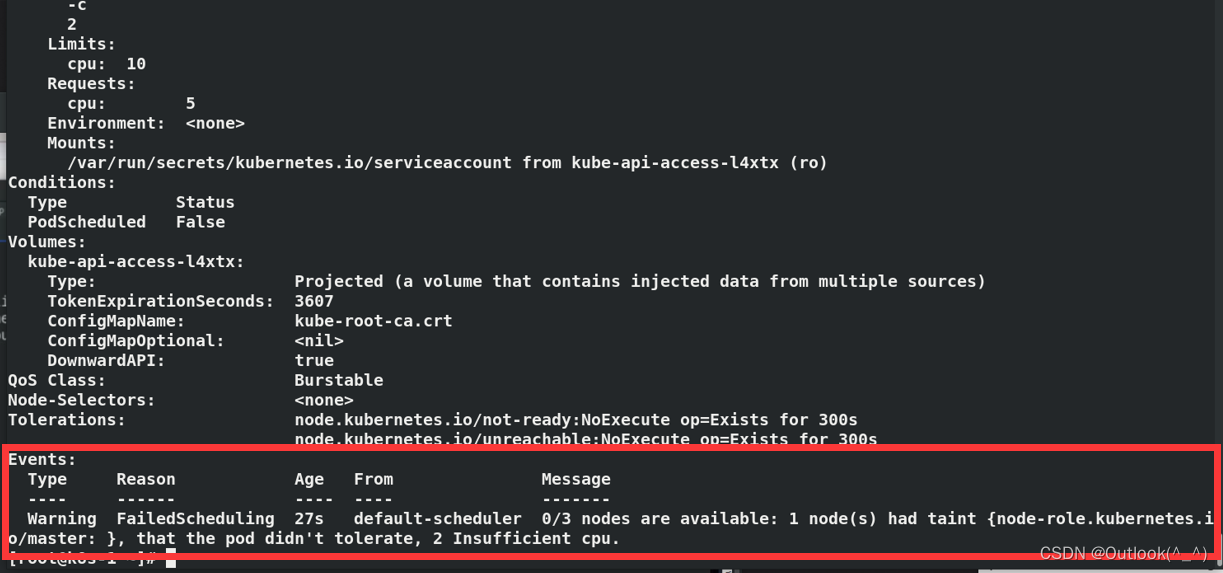
CKA 09_Kubernetes工作负载与调度 资源调度 三类QoS request 资源需求 limit 资源限额
文章目录 1. 资源调度1.1 准备工作1.2 为什么需要 request 和 limit1.3 内存限制1.3.1 Brustable1.3.2 Guaranteed1.3.3 BestEffort1.3.4 当容器申请的资源超出 limit 和 request 1.4 CPU限制 1. 资源调度 1.1 准备工作 Kubernetes 采用 request 和 limit 两种限制类型来对资源…...
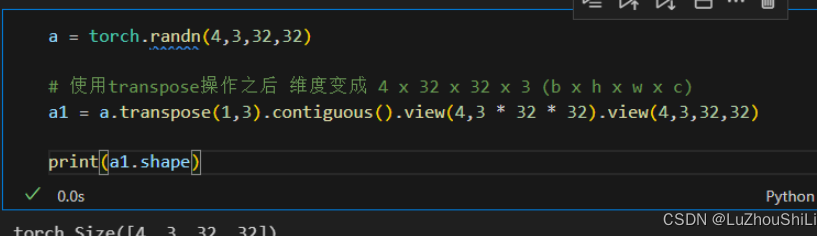
【pytorch】维度变换
【pytorch】维度变换 View操作unSqueeze操作图片处理的一个案例squeeze 维度删减操作维度扩展-expand维度扩展-repeat矩阵的转置操作-transpose View操作 将一个四维的张量(b x c x h x w)转换成一个二维的张量 对于四张图片 将每一张图像用一行向量进…...
)
vue3中的nextTick()
目录 nextTick() 方法用法回调函数方式使用await方式使用 实现原理使用nextTick() 方法时的注意事项 nextTick() 方法 nextTick() 方法是一个非常强大的工具,是一个等待下一次 DOM 更新刷新的工具方法。用于将一个函数以异步的方式推迟到下一个 DOM 更新周期执行。…...
高效学习传感器|霍尔式传感器
01、霍尔式传感器的工作原理 1●霍尔效应 霍尔式传感器的物理基础是霍尔效应。如图1所示,在一块长度为l、宽度为b、厚度为d的长方体导电板上,左、右、前、后侧面都安装上电极。在长度方向上通入电流I,在厚度方向施加磁感应强度为B的磁场。 ■…...
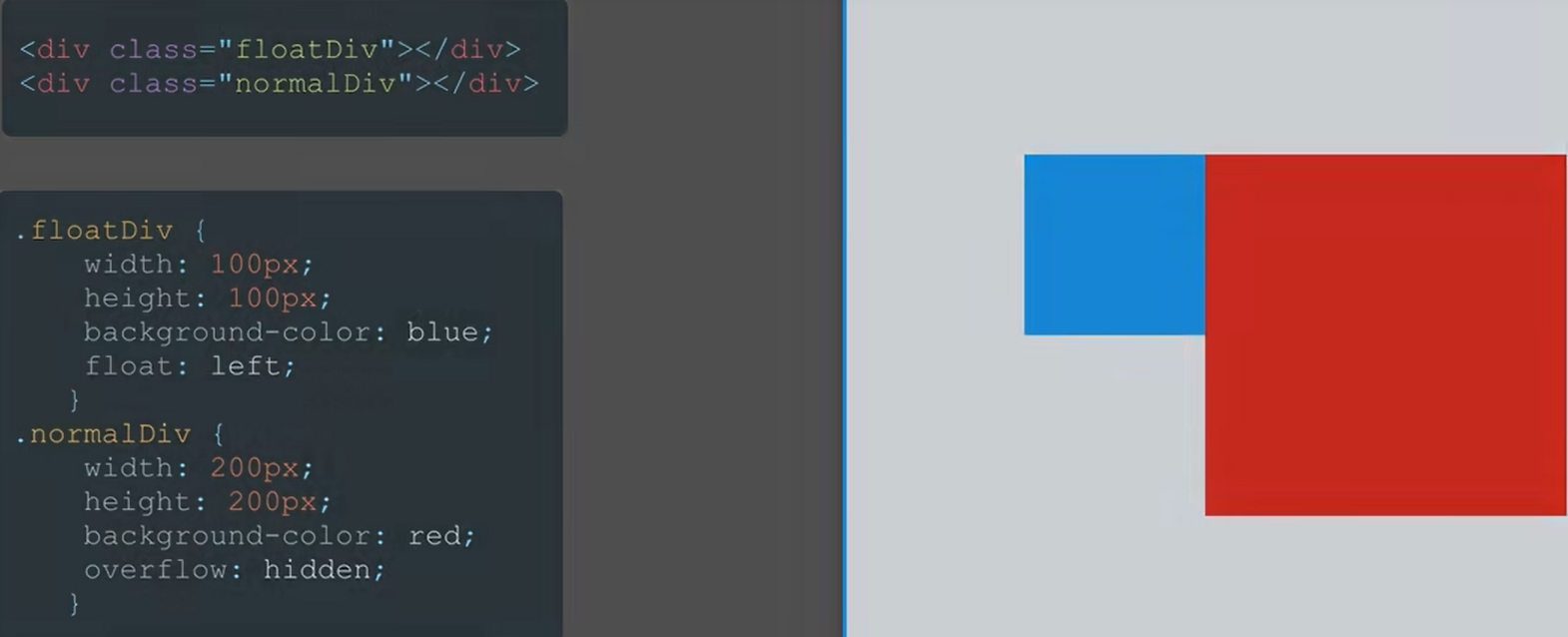
2023年前端面试高频考点HTML5+CSS3
目录 浏览器的渲染过程⭐⭐⭐ CSS 、JS 阻塞 DOM 解析和渲染 回流(重排)和重绘⭐⭐ 选择器 ID选择器、类选择器、标签选择器(按优先级高到低排序)⭐⭐ 特殊符号选择器(>,,~,空格࿰…...

企业开源测试项目实战(附全套实战项目教程+视频+源码)
接口测试项目 1. No matching distribution found for itypes1.1.0 Could not find a version that satisfies the requirement itypes1.1.0 (from -r requirements.txt (line 8)) (from versions: ) No matching distribution found for itypes1.1.0 (from -r requirements.…...

信创办公–基于WPS的EXCEL最佳实践系列 (创建表格)
信创办公–基于WPS的EXCEL最佳实践系列 (创建表格) 目录 应用背景操作步骤1、新建空白工作簿并命名为“奖牌榜”2、使用模板新建工作簿3、新增一张工作表,并将工作簿的标签更改为红色4、复制与隐藏工作表5、添加工作簿属性值6、更改工作簿主题…...

四、HAL_驱动机械按键
1、开发环境。 (1)KeilMDK:V5.38.0.0 (2)STM32CubeMX:V6.8.1 (3)MCU:STM32F407ZGT6 2、机械按键简介 (1)按键内部是机械结构,也就是内部是没有电路的。按键按下内部引脚导通,松开内部断开。 3、实验目的&原理…...
机器学习实战六步法之数据收集方法(四)
要落地一个机器学习的项目,是有章可循的,通过这六个步骤,小白也能搞定机器学习。 看我闪电六连鞭!🤣 数据收集 数据是机器学习的基础,没有数据一切都是空谈!数据集的数据量和数据的质量往往决…...
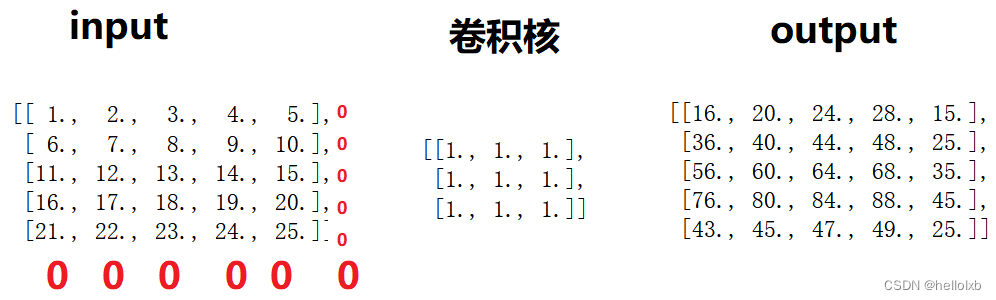
神经网络:CNN中的filter,kernel_size,strides,padding对输出形状的影响
输入数据在经过卷积层后,形状一般会发生改变,而形状的变化往往与以下四个超参数有关。 1,filter(out_channel) 该超参数控制着输入数据经过卷积层中需要与几个卷积核进行运算,而输入数据与每个卷积核进行…...
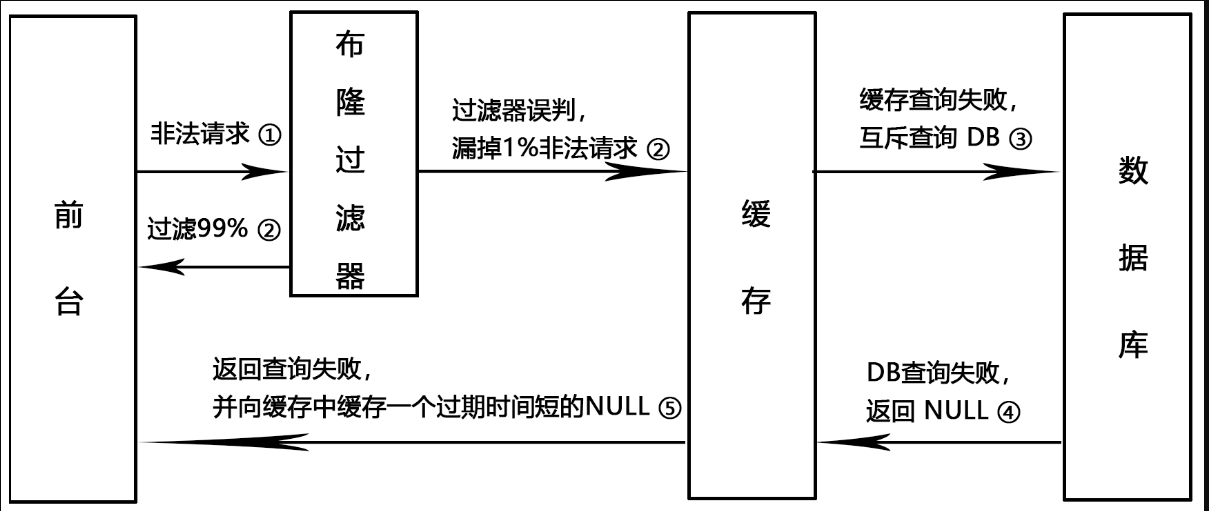
Spring Boot集成Redisson布隆过滤器案例
1 什么是布隆过滤器 布隆过滤器实际上是一个非常长的二进制向量(bitmap)和一系列随机哈希函数。那什么又叫哈希函数呢?哈希函数指将哈希表中元素的关键键值通过一定的函数关系映射为元素存储位置的函数。(HashMap源码) 布隆过滤器的优点&…...

Blender 3MF插件:终极指南 - 如何轻松实现3D打印设计一体化
Blender 3MF插件:终极指南 - 如何轻松实现3D打印设计一体化 【免费下载链接】Blender3mfFormat Blender add-on to import/export 3MF files 项目地址: https://gitcode.com/gh_mirrors/bl/Blender3mfFormat 你是否曾经在Blender中精心设计了3D模型ÿ…...

【AI研发知识管理终极指南】:SITS2026权威框架首次深度解密,3大认知盲区正在拖垮你的AI工程化落地?
更多请点击: https://intelliparadigm.com 第一章:SITS2026框架的诞生背景与范式革命 传统智能系统开发长期受限于异构协议耦合、时序语义模糊及跨域协同低效三大瓶颈。2024年全球工业智能峰会(GIISS)发布的《智能时序系统白皮书…...

WarcraftHelper魔兽争霸III优化工具:终极完整指南
WarcraftHelper魔兽争霸III优化工具:终极完整指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 你是否还在为《魔兽争霸III》的老旧限制…...

开源AI教练Sage Coach:基于提示词工程的认知引导系统设计与实践
1. 项目概述:当AI成为你的专属人生教练凌晨三点,创业第三年,账上资金只够撑两个月,合伙人刚刚离开。这不是电影情节,而是许多创业者、职场人乃至普通人可能遭遇的真实困境。在那个时刻,打开终端,…...

如何用Mermaid Live Editor构建企业级实时图表系统:架构师的技术选型指南
如何用Mermaid Live Editor构建企业级实时图表系统:架构师的技术选型指南 【免费下载链接】mermaid-live-editor Edit, preview and share mermaid charts/diagrams. New implementation of the live editor. 项目地址: https://gitcode.com/GitHub_Trending/me/m…...

基于MCP协议与Playwright的AI智能体网页抓取工具部署与实战
1. 项目概述:一个为AI智能体打造的“网页抓取工具箱” 如果你正在开发或使用基于MCP(Model Context Protocol)的AI智能体,并且经常需要让它们从网页上获取结构化数据,那么你很可能已经遇到了一个核心痛点: …...

WinForm + Modbus 上位机温湿度数据采集系统
前言工业自动化和环境监控领域,实时掌握现场的温湿度数据至关重要。传统的监控方式往往依赖人工记录或简单的报警装置,缺乏直观性和连续性。本文推荐一个基于WinForm开发的上位机温湿度采集系统,通过Modbus通信协议与下位机进行数据交互&…...

CANN/asc-devkit asc_le函数文档
asc_le 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 项目地址: https://gitcode.com/can…...

在Node.js后端服务中集成多模型API以提升应用灵活性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在Node.js后端服务中集成多模型API以提升应用灵活性 对于需要构建智能客服或内容生成功能的Node.js开发者而言,依赖单一…...

终极指南:Awoo Installer - Nintendo Switch游戏安装的免费开源解决方案
终极指南:Awoo Installer - Nintendo Switch游戏安装的免费开源解决方案 【免费下载链接】Awoo-Installer A No-Bullshit NSP, NSZ, XCI, and XCZ Installer for Nintendo Switch 项目地址: https://gitcode.com/gh_mirrors/aw/Awoo-Installer 还在为Switch游…...