【EasyX】实时时钟
目录
- 实时时钟
- 1. 绘制静态秒针
- 2. 秒针的转动
- 3. 根据实际时间转动
- 4. 添加时针和分针
- 5. 添加表盘刻度
实时时钟
本博客介绍利用EasyX实现一个实时钟表的小程序,同时学习时间函数的使用。
本文源码可从github获取
1. 绘制静态秒针
第一步定义钟表的中心坐标center,它也是秒针的起点;定义秒针的长度secondLength、秒针的终点坐标secondEnd;利用setlinestyle函数设定线的型号和宽度,调用line函数绘制秒针。
#include <graphics.h>
#include <conio.h>
#include <cmath>using namespace std;struct Point
{int x;int y;
};#define High 480
#define Width 640int main(void)
{initgraph(Width, High);Point center, secondEnd;center.x = Width / 2;center.y = High / 2;int sencondLenth = Width / 5;secondEnd.x = center.x + sencondLenth;secondEnd.y = center.y;// 画秒针setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素setcolor(WHITE);line(center.x, center.y, secondEnd.x, secondEnd.y);_getch();closegraph();return 0;
}
2. 秒针的转动
第二步实现秒针的转动,定义secondAngle为秒针对应的角度,利用三角几何知识求出秒针的终点坐标:
secondEnd.x = center.x + secondLenth * sin(secondAngle);
secondEnd.y = center.y - secondLenth * cos(secondAngle);
让角度循环变化,则实现了秒针转动的动画效果。
#include <graphics.h>
#include <conio.h>
#include <cmath>using namespace std;struct Point
{int x;int y;
};#define High 480
#define Width 640
#define PI 3.1415926int main(void)
{initgraph(Width, High);Point center, secondEnd;center.x = Width / 2;center.y = High / 2;int secondLenth = Width / 5;secondEnd.x = center.x + secondLenth;secondEnd.y = center.y;double secondAngle = 1.0; while (true){// 由角度决定终点坐标secondEnd.x = center.x + secondLenth * sin(secondAngle);secondEnd.y = center.y - secondLenth * cos(secondAngle);// 画秒针setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素setcolor(WHITE);line(center.x, center.y, secondEnd.x, secondEnd.y);Sleep(100);setcolor(BLACK);line(center.x, center.y, secondEnd.x, secondEnd.y);// 秒针角度变化secondAngle = secondAngle * 2 * PI / 60 + 1;}_getch();closegraph();return 0;
}
3. 根据实际时间转动
第三步定义系统变量(SYSTEMTIME ti),通过GetLocalTime(&ti)获取当前时间,秒针的角度由实际时间决定,即secondAngle = ti.wSecond * 2 * PI/60。
#include <graphics.h>
#include <conio.h>
#include <cmath>using namespace std;struct Point
{int x;int y;
};#define High 480
#define Width 640
#define PI 3.1415926int main(void)
{initgraph(Width, High);Point center, secondEnd;center.x = Width / 2;center.y = High / 2;int secondLenth = Width / 5;secondEnd.x = center.x + secondLenth;secondEnd.y = center.y;double secondAngle;SYSTEMTIME ti;while (true){GetLocalTime(&ti);secondAngle = ti.wSecond * 2 * PI / 60;// 由角度决定终点坐标secondEnd.x = center.x + secondLenth * sin(secondAngle);secondEnd.y = center.y - secondLenth * cos(secondAngle);// 画秒针setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素setcolor(WHITE);line(center.x, center.y, secondEnd.x, secondEnd.y);Sleep(100);setcolor(BLACK);line(center.x, center.y, secondEnd.x, secondEnd.y);}_getch();closegraph();return 0;
}

4. 添加时针和分针
第四步添加时针、分针,和秒针变化相比,他们的长度、宽度、颜色、旋转速度有一定的不同。
#include <graphics.h>
#include <conio.h>
#include <cmath>using namespace std;struct Point
{int x;int y;
};#define High 480
#define Width 640
#define PI 3.1415926int main(void)
{initgraph(Width, High);Point center, secondEnd, minuteEnd, hourEnd;center.x = Width / 2;center.y = High / 2;int secondLenth = Width / 5;int minuteLenth = Width / 6;int hourLenth = Width / 8;double secondAngle;double minuteAngle;double hourAngle;SYSTEMTIME ti;while (true){GetLocalTime(&ti);secondAngle = ti.wSecond * 2 * PI / 60;minuteAngle = ti.wMinute * 2 * PI / 60;hourAngle = (ti.wHour % 12) * 2 * PI / 12;// 由角度决定秒针终点坐标secondEnd.x = center.x + secondLenth * sin(secondAngle);secondEnd.y = center.y - secondLenth * cos(secondAngle);// 由角度决定分针终点坐标minuteEnd.x = center.x + minuteLenth * sin(minuteAngle);minuteEnd.y = center.y - minuteLenth * cos(minuteAngle);// 由角度决定时针终点坐标hourEnd.x = center.x + hourLenth * sin(hourAngle);hourEnd.y = center.y - hourLenth * cos(hourAngle);// 画秒针setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素setcolor(WHITE);line(center.x, center.y, secondEnd.x, secondEnd.y);// 画分针setlinestyle(PS_SOLID, 4); // 画实线,宽度为4个像素setcolor(BLUE);line(center.x, center.y, minuteEnd.x, minuteEnd.y);// 画时针setlinestyle(PS_SOLID, 6); // 画实线,宽度为6个像素setcolor(RED);line(center.x, center.y, hourEnd.x, hourEnd.y);Sleep(10); // 延时10毫秒setcolor(BLACK);setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素line(center.x, center.y, secondEnd.x, secondEnd.y);setlinestyle(PS_SOLID, 4); // 画实线,宽度为4个像素line(center.x, center.y, minuteEnd.x, minuteEnd.y);setlinestyle(PS_SOLID, 6); // 画实线,宽度为6个像素line(center.x, center.y, hourEnd.x, hourEnd.y);}int c = _getch();closegraph();return 0;
}
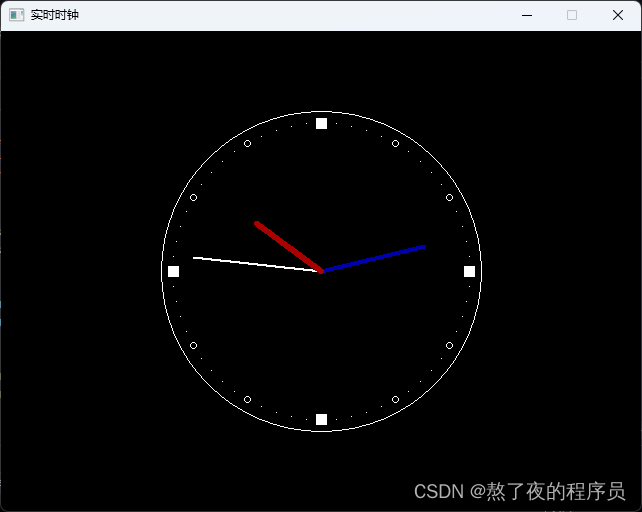
5. 添加表盘刻度
第五步绘制表盘,并可以利用outtextxy()函数在画面中输出文字,为了让时针、分针的转动更自然,对求解时针、分针的角度进行了改进。
#include <graphics.h>
#include <conio.h>
#include <cmath>using namespace std;struct Point
{int x;int y;
};#define High 480
#define Width 640
#define PI 3.1415926int main(void)
{initgraph(Width, High);Point center, secondEnd, minuteEnd, hourEnd;center.x = Width / 2;center.y = High / 2;int secondLenth = Width / 5;int minuteLenth = Width / 6;int hourLenth = Width / 8;double secondAngle;double minuteAngle;double hourAngle;SYSTEMTIME ti;BeginBatchDraw();while (true){// 绘制一个简单的表盘setlinestyle(PS_SOLID, 1); // 画实线,宽度为1个像素setcolor(WHITE);circle(center.x, center.y, Width / 4);// 画刻度int x, y, i;for (i = 0; i < 60; i++){x = center.x + int(Width/4.3*sin(PI*2*i/60));y = center.y - int(Width/4.3*cos(PI*2*i/60));if (i % 15 == 0) {bar(x - 5, y -5, x + 5, y + 5);}else if (i % 5 == 0) {circle(x, y, 3);}else {putpixel(x, y, WHITE);}}GetLocalTime(&ti);secondAngle = ti.wSecond * 2 * PI / 60;minuteAngle = ti.wMinute * 2 * PI / 60 + secondAngle / 60;hourAngle = ti.wHour*2*PI/12 + minuteAngle / 12;// 由角度决定秒针终点坐标secondEnd.x = center.x + secondLenth * sin(secondAngle);secondEnd.y = center.y - secondLenth * cos(secondAngle);// 由角度决定分针终点坐标minuteEnd.x = center.x + minuteLenth * sin(minuteAngle);minuteEnd.y = center.y - minuteLenth * cos(minuteAngle);// 由角度决定时针终点坐标hourEnd.x = center.x + hourLenth * sin(hourAngle);hourEnd.y = center.y - hourLenth * cos(hourAngle);// 画秒针setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素setcolor(WHITE);line(center.x, center.y, secondEnd.x, secondEnd.y);// 画分针setlinestyle(PS_SOLID, 4); // 画实线,宽度为4个像素setcolor(BLUE);line(center.x, center.y, minuteEnd.x, minuteEnd.y);// 画时针setlinestyle(PS_SOLID, 6); // 画实线,宽度为6个像素setcolor(RED);line(center.x, center.y, hourEnd.x, hourEnd.y);FlushBatchDraw();Sleep(10); // 延时10毫秒setcolor(BLACK);setlinestyle(PS_SOLID, 2); // 画实线,宽度为2个像素line(center.x, center.y, secondEnd.x, secondEnd.y);setlinestyle(PS_SOLID, 4); // 画实线,宽度为4个像素line(center.x, center.y, minuteEnd.x, minuteEnd.y);setlinestyle(PS_SOLID, 6); // 画实线,宽度为6个像素line(center.x, center.y, hourEnd.x, hourEnd.y);}EndBatchDraw();int c = _getch();closegraph();return 0;
}
至此完成。
相关文章:
【EasyX】实时时钟
目录 实时时钟1. 绘制静态秒针2. 秒针的转动3. 根据实际时间转动4. 添加时针和分针5. 添加表盘刻度 实时时钟 本博客介绍利用EasyX实现一个实时钟表的小程序,同时学习时间函数的使用。 本文源码可从github获取 1. 绘制静态秒针 第一步定义钟表的中心坐标center&a…...

基于XC7Z100的PCIe采集卡(GMSL FMC采集卡)
GMSL 图像采集卡 特性 ● PCIe Gen2.0 X8 总线; ● 支持V4L2调用; ● 1路CAN接口; ● 6路/12路 GMSL1/2摄像头输入,最高可达8MP; ● 2路可定义相机同步触发输入/输出; 优势 ● 采用PCIe主卡与FMC子…...
Kibana:使用 Kibana 自带数据进行可视化(一)
在今天的练习中,我们将使用 Kibana 自带的数据来进行一些可视化的展示。希望对刚开始使用 Kibana 的用户有所帮助。 前提条件 如果你还没有安装好自己的 Elastic Stack,你可以参考如下的视频来开启 Elastic Stack 并进行下面的练习。你可以开通阿里云检…...
MySQL数据库基础 07
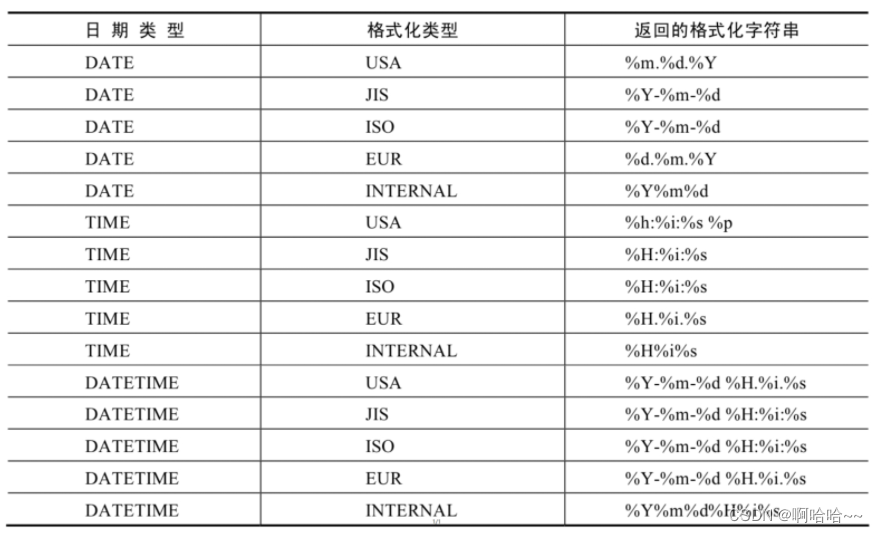
第七章 单行函数 1. 函数的理解1.1 什么是函数1.2 不同DBMS函数的差异1.3 MySQL的内置函数及分类 2. 数值函数2.1 基本函数2.2 角度与弧度互换函数2.3 三角函数2.4 指数与对数2.5 进制间的转换 3. 字符串函数4. 日期和时间函数4.1 获取日期、时间 4.2 日期与时间戳的转换 4.3 获…...

JVM | JVM垃圾回收
JVM | JVM垃圾回收 1、堆空间的基本结构2、内存分配和回收原则2.1、对象优先在 Eden 区分配2.2、大对象直接进入老年代2.3、长期存活的对象将进入老年代2.4、主要进行 gc 的区域2.5、空间分配担保3、死亡对象判断方法3.1、引用计数法3.2、可达性分析算法3.3、引用类型总结3.4、…...

avive零头撸矿
Avive 是一个透明的、自下而上替代自上而下的多元网络,旨在克服当前生态系统的局限性,实现去中心化社会。 aVive:一个基于 SBT 和市场的 deSoc,它使 dapps 能够与分散的位置 oracle 和 SBT 关系进行互操作。您的主权社交网络元宇宙…...

openGauss5.0之学习环境 Docker安装
文章目录 0.前言1. 准备软硬件安装环境1.1 软硬件环境要求1.2 修改操作系统配置1.2.1 关闭操作系统防火墙 1.3 设置字符集参数1.4 设置时区和时间(可选)关闭swap交换内存1.5 关闭RemoveIPC1.6 关闭HISTORY记录 2. 容器安装2. 1支持的架构和操作系统版本2…...

数据可视化大屏人员停留系统的开发实录(默认加载条件筛选、单击加载、自动刷新加载、异步加载数据)
项目需求 录入进入房间的相关数据;从进入时间开始计时,计算滞留房间的时间;定时刷新数据,超过30分钟的人数,进行红色告警; 实现流程 为了完整地实现上述需求,我们可以按照以下步骤开发&#…...

【Linux】-关于调试器gdb的介绍和使用
作者:小树苗渴望变成参天大树 作者宣言:认真写好每一篇博客 作者gitee:gitee 如 果 你 喜 欢 作 者 的 文 章 ,就 给 作 者 点 点 关 注 吧! 文章目录 前言一、Linux中的debug和release二、gdb的使用**1.进入调试****2.显示代码*…...

项目开发经验
hadoop 1.namenode中有专门的工作线程池用于处理与datanode的心跳信号 dfs.namenode.handler.count20 * log2(Clust 2.编辑日志存储路径 dfs.namenode.edits.dir 设置与镜像文件存储路径 dfs.namenode分开存放,可以达到提高并发 3.yarn参数调优,单个服…...

STM32——05-按键、时钟控制、中断复位 点亮LED灯
如何点亮一颗LED灯 编程实现点灯 常用的 GPIO HAL 库函数: void HAL_GPIO_Init ( GPIO_TypeDef * GPIOx , GPIO_InitTypeDef * GPIO_Init ); void HAL_GPIO_WritePin ( GPIO_TypeDef * GPIOx , uint16_t GPIO_Pin , GPIO_PinState PinState ); void HAL_GPIO_Togg…...

VBA下载二进制文件,文本读写
这里使用了vba如下两个对象: Microsoft.XMLHTTP:文件读写,可读写二进制,可指定编码,对于utf-8编码文本文件使用FSO的TextStream对象打开,读取到的内容可能会出现乱码,可以使用该对象打开;前期绑定添加引用…...

MongoDB结合Robo 3T 1.4.3的简单操作
MongoDB的简单操作结合Robo 3T 1.4.3工具进行查询。 常用的正则表达式 /* 29 */ 正则表达式 /\* [0-9]* \*/ "_id" : ObjectId("5f3d05cdfd2aa9a8a7"), 正则表达式 \"([^\"]*_id)\".*, 使用方法:查询结果去掉注释和不需要…...

【学习笔记】[AGC048D] Pocky Game
这是一个非平等博弈。但是只要求你判断胜负,本身也不是一道结论题,所以可以用 D P DP DP来解决。 结论:第一堆石子剩的越多,先手玩家获胜的概率越大。这直接引出了一个非常感性的结论:每次取石子时要么取一堆…...
Qgis中进行Shp和Excel属性连接实现百强县公共预算空间分析
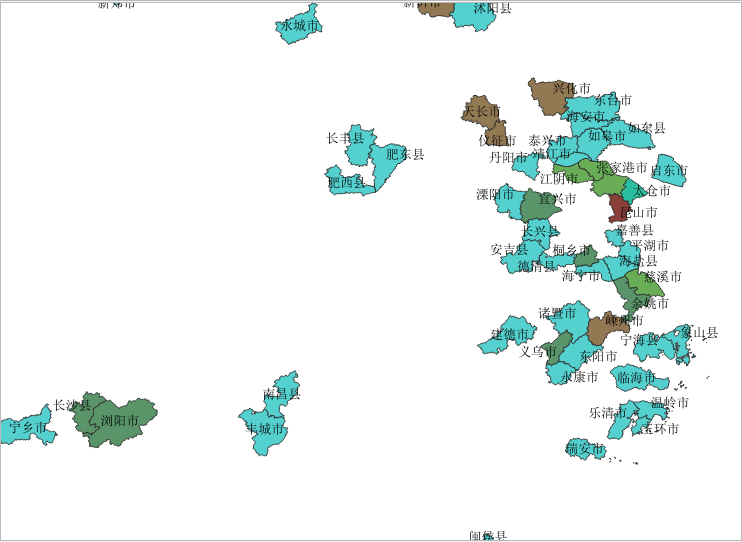
前言 在之前的博文中,将2022的全国百强县一般公共预算收入的数据下载到了本地,博客原文地址:一种使用Java的快速将Web中表格转换成Excel的方法。对于不关注时空位置关系的一般分析,到此也就基本够用了。但是,如果站在全…...

ES6 新增的循环方法
在 ES6(ECMAScript 2015)中,新增了一些循环方法,这些方法可以帮助我们更方便地遍历数组、字符串、Set、Map 等数据结构。本文将介绍一些常用的 ES6 循环方法。 for…of 循环 for…of 循环是一种遍历可迭代对象的方法,…...

移动端事件300ms延迟解决
有移动端与PC端的项目开发,那么移动端和PC端开发上是存在差异的,比如 click 事件的300ms 延迟,即移动Web页面上的click事件响应都要慢上300ms,移动设备访问Web页面时往往需要 “双击” 或者 “捏开” 来放大页面看清页面的具体内容…...
NRF52832的DFU
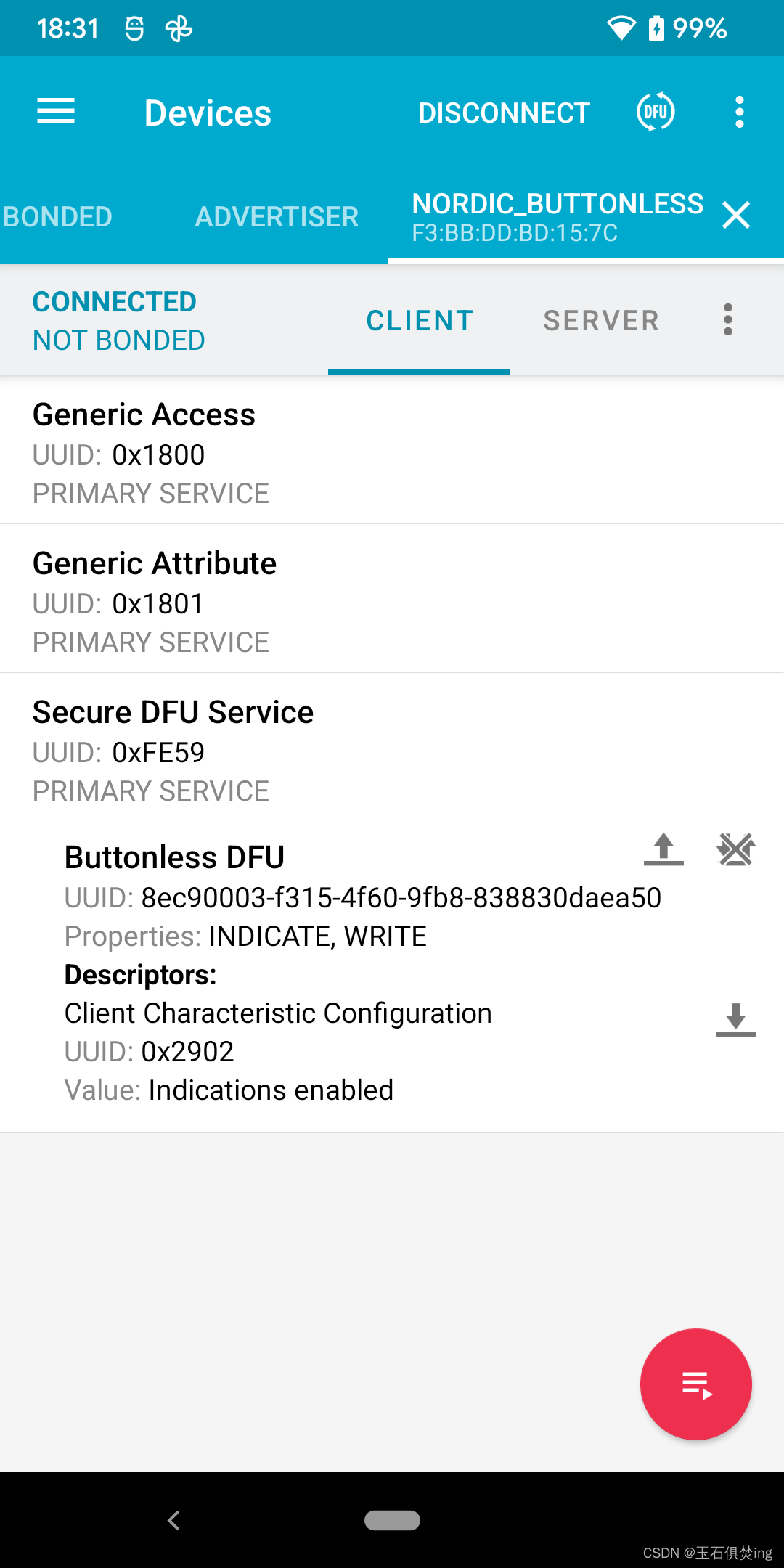
开发环境: Winsodw:10 nRF5_SDK:17.1.0 1 工具安装 1.1 gcc-arm-none-eabi Downloads | GNU Arm Embedded Toolchain Downloads – Arm Developer 下载“gcc-arm-none-eabi-10.3-2021.10-win32.exe”,接提示安装。注意安装完…...
开源WebRTC库放大器模式在采集桌面图像时遇到的DPI缩放与内存泄漏问题排查
目录 1、在非100%的显示比例下放大器采集到的桌面图像不全问题 1.1、通过manifest文件禁止系统对软件进行缩放 1.2、调用SetThreadDpiAwarenessContext函数,禁止系统对目标线程中的窗口进行缩放 1.3、使用winver命令查看Windows的年月版本 2、使用放大器模式遇…...

敲黑板!java反射机制和原理
获取Class对象:首先,你需要获取表示要操作的类的Class对象。可以使用以下三种方式之一来获取Class对象: Class.forName()方法:使用类的全限定名获取Class对象,例如:Class<? Class<?> clazz MyC…...

从“共和国之辉”到AI原生应用:一个关于“哥布林”诞生的技术启示录
从“共和国之辉”到AI原生应用:一个关于“哥布林”诞生的技术启示录 2025年7月,一篇名为《Where the goblins came from》的文章在Hacker News上引发了超过710票的热议。当大多数技术评论者将目光聚焦于AI模型的最新突破时,这篇来自OpenAI的文…...

德国工业4.0:从顶层设计到车间实践的制造业数字化转型
1. 工业4.0浪潮下的欧洲:一场由德国引领的深度变革提到德国制造,很多人脑海里蹦出来的词是“严谨”、“保守”甚至“刻板”。没错,德国人对于工业流程、制造工艺和质量标准的执着,有时近乎偏执。但正是这种对“传统”的极致坚守&a…...

深度解析:HS2-HF Patch如何通过模块化架构彻底重塑游戏体验
深度解析:HS2-HF Patch如何通过模块化架构彻底重塑游戏体验 【免费下载链接】HS2-HF_Patch Automatically translate, uncensor and update HoneySelect2! 项目地址: https://gitcode.com/gh_mirrors/hs/HS2-HF_Patch HS2-HF Patch作为《Honey Select 2》最全…...
全量上线及直连 API 体验指南)
AI 绘图新进展:GPTimage2 系列(含 4K 超清版)全量上线及直连 API 体验指南
随着 AIGC(人工智能生成内容)技术的快速迭代,近期备受关注的 GPTimage2 系列模型已全量上线。作为 AI 绘图领域的新晋生力军,GPTimage2 在图像生成质量、细节刻画上展现出了极强的竞争力。特别值得一提的是,本次不仅上…...

机器学习之随机森林详解
摘要随机森林(Random Forest)是一种基于Bagging集成学习思想的 ensemble method,通过构建多棵决策树并综合其预测结果来实现分类和回归任务。本文详细介绍了随机森林的核心原理、关键超参数、OOB误差估计机制,以及其在特征重要性分…...
)
告别玄学调试:手把手教你用Vivado配置Xilinx SRIO IP核(附完整工程源码)
告别玄学调试:手把手教你用Vivado配置Xilinx SRIO IP核(附完整工程源码) 在FPGA开发领域,高速串行通信一直是工程师们又爱又恨的技术难点。特别是当项目需要实现芯片间高速数据交互时,Serial RapidIO(SRIO…...

【研报 A111】中国生命科学AI行业发展蓝皮书:三阶段演进,2026年进入创造应用期
摘要:生命科学领域的AI赋能正迎来产业跃迁,AI4LS作为AIforScience最核心的应用场景,凭借处理多维复杂数据的天然优势,破解生命科学研发周期长、数据庞杂的痛点。当前行业正处于2.0预测阶段向3.0创造阶段的过渡期,Alpha…...

影刀RPA高阶架构:告别“连点器”思维,内置原生指纹浏览器重塑全域店群防封底座
大家好,我是林焱,一名专注电商底层业务逻辑与企业级 RPA 自动化架构定制的独立开发者。 在技术社区和各大电商交流群里,我经常会遇到使用影刀 RPA 的开发者提出这样一个痛点:“林大,我用影刀写了一套逻辑非常严密的自…...

ArcGIS符号库“隐身”之谜:从DAO组件缺失到完整恢复的实战指南
1. 当符号选择器突然"罢工":一个GISer的崩溃瞬间 那天早上我正赶着完成客户的地图项目,准备给水系图层换个漂亮的蓝色符号。像往常一样双击图层打开属性窗口,点击Symbol Selector准备挑选样式时,整个人瞬间僵住了——本…...

从‘相似三角形’到3D点云:手把手用Python+OpenCV模拟激光三角法三维重建
从相似三角形到3D点云:PythonOpenCV激光三角法三维重建实战 激光三角测量法在工业检测、逆向工程等领域有着广泛应用。本文将带您从零开始,用Python和OpenCV实现一个完整的激光三角法三维重建系统。不同于简单的位移测量,我们将重点放在如何通…...