U-Boot移植 (2)- LCD 驱动修改和网络驱动修改
文章目录
- 1. LCD 驱动修改
- 1.1 修改c文件配置
- 1.2 修改h文件配置
- 1.3 编译测试
- 2. 网络驱动修改
- 2.1 I.MX6U-ALPHA 开发板网络简介
- 2.2 网络 PHY 地址修改
- 2.3 删除 uboot 中 74LV595 的驱动代码
- 2.4 添加开发板网络复位引脚驱动
- 2.5 更新 PHY 的连接状态和速度
- 2.6 烧写调试
- 2.7 测试一下 ENET1
- 2.8 其他需要修改的地方
1. LCD 驱动修改
一般 uboot 中修改驱动基本都是在 xxx.h 和 xxx.c 这两个文件中进行的, xxx 为板子名称,即board/freescale/mx6ull_myboard/mx6ull_myboard.c和 include/configs/mx6ull_myboard.h这两个文件。
一般修改 LCD 驱动重点注意以下几点:
- LCD 所使用的 GPIO,查看 uboot 中 LCD 的 IO 配置是否正确
- LCD 背光引脚 GPIO 的配置
- LCD 配置参数是否正确
正点原子的 I.MX6U-ALPHA 开发板 LCD 原理图和 NXP 官方 I.MX6ULL 开发板一致,也就是 LCD 的 IO 和背光 IO 都一样的,所以 IO 部分就不用修改了。
1.1 修改c文件配置
需要修改的之后 LCD 参数,打开文件 mx6ull_myboard.c,找到如下所示内容:
struct display_info_t const displays[] = {{.bus = MX6UL_LCDIF1_BASE_ADDR,.addr = 0,.pixfmt = 24,.detect = NULL,.enable = do_enable_parallel_lcd,.mode = {.name = "TFT43AB",.xres = 480,.yres = 272,.pixclock = 108695,.left_margin = 8,.right_margin = 4,.upper_margin = 2,.lower_margin = 4,.hsync_len = 41,.vsync_len = 10,.sync = 0,.vmode = FB_VMODE_NONINTERLACED
} } };
先来分析一下这段代码,该代码定义了一个变量displays,类型为display_info_t,这个结构体是LCD信息结构体,其中包括了LCD的分辨率,像素格式,LCD的各个参数等。
display_info_t 定义在文件 arch/arm/include/asm/imx-common/video.h 中,定义如下:
struct display_info_t {int bus;int addr;int pixfmt;int (*detect)(struct display_info_t const *dev);void (*enable)(struct display_info_t const *dev);struct fb_videomode mode;
};
这里的pixfmt是像素格式,也就是一个像素点是多少位,如果是RGB565的话就是16位,如果是RGB888的话就是24位,一般使用 RGB888。
结构体display_info_t还有个mode成员变量,此成员变量也是个结构体,为fb_videomode,定义在文件 include/linux/fb.h 中,定义如下:
struct fb_videomode {const char *name; /* optional */u32 refresh; /* optional */u32 xres;u32 yres;u32 pixclock;u32 left_margin;u32 right_margin;u32 upper_margin;u32 lower_margin;u32 hsync_len;u32 vsync_len;u32 sync;u32 vmode;u32 flag;
};
结构体b_videomode里面的成员变量为LCD的参数,这些成员变量函数如下:
name:LCD 名字,要和环境变量中的 panel 相等xres 、yres:LCD X 轴和 Y 轴像素数量pixclock:像素时钟,每个像素时钟周期的长度,单位为皮秒left_margin:HBP(horizontal back porch),水平同步后肩right_margin:HFP(horizontal front porch),水平同步前肩upper_margin:VBP(vertical back porch),垂直同步后肩lower_margin:VFP(vertical front porch),垂直同步前肩hsync_len:HSPW(horizontal sync pulse width),行同步脉宽vsync_len:VSPW(vertical sync pulse width),垂直同步脉宽vmode:大多数使用 FB_VMODE_NONINTERLACED,也就是不使用隔行扫描。
这些参数需要与实用的LCD的参数一致,唯一不同的像素时钟 pixclock 的含义不同 。
「正点原子的7寸RGB屏幕」(ATK7016,1024x600)的一些参数如下:
| 参数 | 值 |
|---|---|
| width | 1024 |
| height | 600 |
| HBP | 140 |
| HFP | 160 |
| VBP | 20 |
| VFP | 12 |
| HSPW | 20 |
| VSPW | 3 |
像素时钟
像素时钟就是 RGB LCD 的时钟信号,以 ATK7016 这款屏幕为例,显示一帧图像所需要的时钟数就是:
= (VSPW+VBP+LINE+VFP) * (HSPW + HBP + HOZVAL + HFP)
= (3 + 20 + 600 + 12) * (20 + 140 + 1024 + 160)
= 635 * 1344
= 853440。
显示一帧图像需要853440个时钟数,那么显示60帧就是: 853440 * 60 = 51206400≈51.2M,所以像素时钟就是 51.2MHz。 因此:
pixclock=(1/51200000)*10^12=19531
在根据其他的屏幕参数,可以得出 ATK7016 屏幕的配置参数如下:
struct display_info_t const displays[] = {{.bus = MX6UL_LCDIF1_BASE_ADDR,.addr = 0,.pixfmt = 24,.detect = NULL,.enable = do_enable_parallel_lcd,.mode = {.name = "TFT7016",.xres = 1024,.yres = 600,.pixclock = 19531,.left_margin = 100, //HBPD.right_margin = 88, //HFPD.upper_margin = 39, //VBPD.lower_margin = 21, //VFBD.hsync_len = 48, //HSPW.vsync_len = 3, //VSPW.sync = 0,.vmode = FB_VMODE_NONINTERLACED
} } };
1.2 修改h文件配置
另外还要修改include/configs/路径下的mx6ull_myboard.h,找到所有如下语句:
panel=TFT43AB
将其改为:
panel=TFT7016
也就是设置 panel 为 TFT7016, panel 的值要与displays.name 成员变量的值一致。修改完成以后重新编译一遍 uboot 并烧写到 SD 中启动
1.3 编译测试
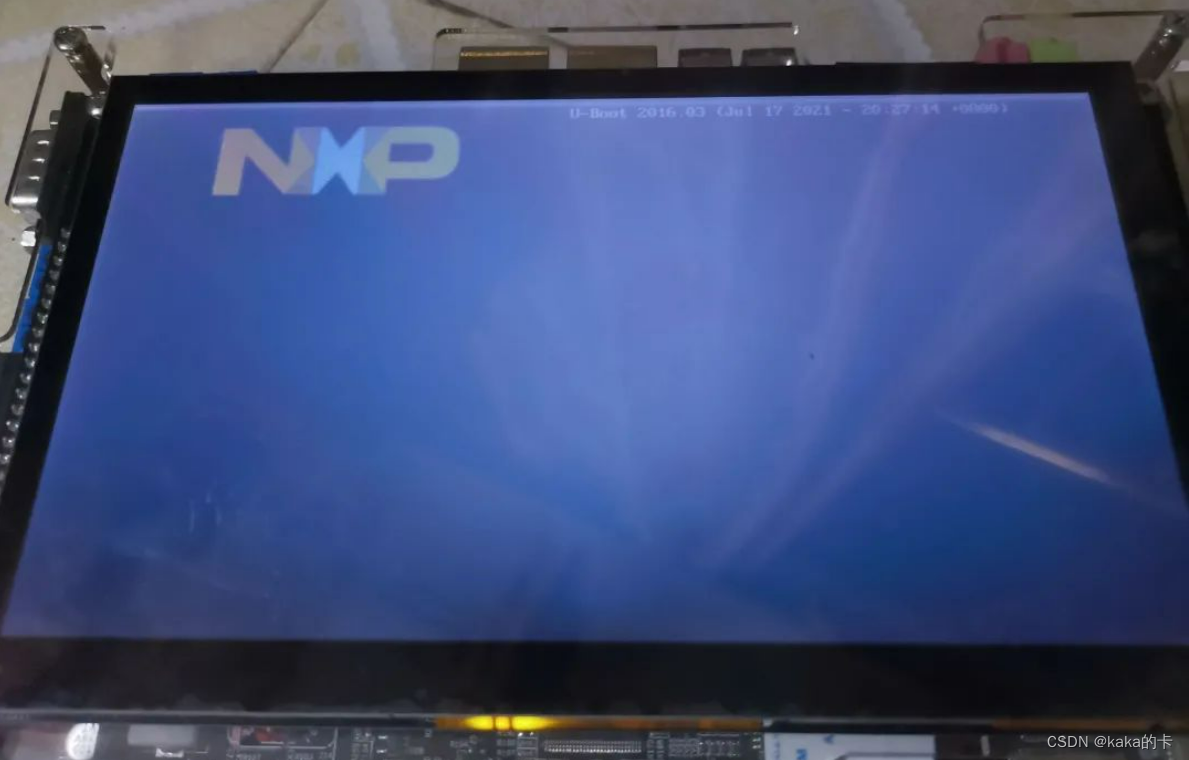
将修改后的uboot编译下载以后,LCD 驱动一般就会工作正常了,LCD 上会显示 NXP 的 logo
U-Boot 2016.03 (Jun 26 2023 - 22:21:59 +0800)CPU: Freescale i.MX6ULL rev1.1 69 MHz (running at 396 MHz)
CPU: Industrial temperature grade (-40C to 105C) at 48C
Reset cause: WDOG
Board: MX6ULL 14x14 EVK
I2C: ready
DRAM: 512 MiB
MMC: FSL_SDHC: 0, FSL_SDHC: 1
Display: TFT7016 (1024x600)
Video: 1024x600x24
In: serial
Out: serial
Err: serial
switch to partitions #0, OK
mmc0 is current device
Net: Board Net Initialization Failed
No ethernet found.
Normal Boot
Hit any key to stop autoboot: 0
2. 网络驱动修改
2.1 I.MX6U-ALPHA 开发板网络简介
I.MX6ULL内部有个以太网MAC外设,也就是ENET,需要外接一个PHY芯片来实现网络通信功能,也就是 「内部MAC+外部PHY芯片」 的方案。
I.MX6UL/ULL 有两个网络接口 ENET1 和 ENET2,正点原子的 I.MX6U-ALPHA 开发板提供了这两个网络接口,其中 ENET1 和 ENET2 都使用 LAN8720A 作为 PHY 芯片。 NXP 官方的I.MX6ULL EVK 开发板使用 KSZ8081 这颗 PHY 芯片。更换 PHY 芯片以后需要调整网络驱动,使网络工作正常。
ENET1
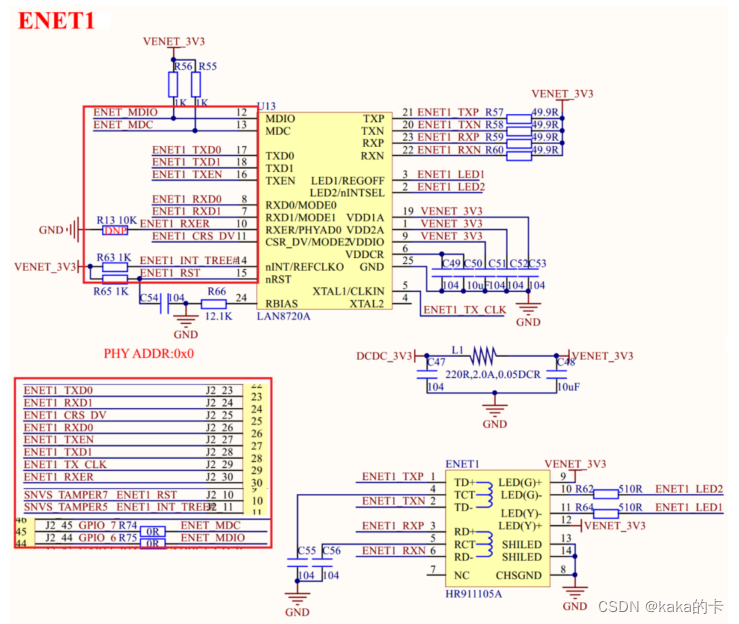
ENET1 的网络 PHY 芯片为 LAN8720A,通过 RMII 接口与 I.MX6ULL 相连,正点原子I.MX6U-ALPHA 开发板的 ENET1 引脚与 NXP 官方的 I.MX6ULL EVK 开发板基本一样,唯独复位引脚不同。正点原子I.MX6U-ALPHA 开发板的 ENET1 复位引脚ENET1_RST 接到了 I.M6ULL 的 SNVS_TAMPER7 这个引脚上。
I.MX6ULL 通过 MDIO接口来读取 PHY 芯片的内部寄存器, MDIO 接口有两个引脚, ENET_MDC 和 ENET_MDIO,ENET_MDC 提供时钟, ENET_MDIO 进行数据传输。一个 MDIO 接口可以管理 32 个 PHY 芯片,同一个 MDIO 接口下的这些 PHY 使用不同的器件地址来做区分, MIDO 接口通过不同的器件地址即可访问到相应的 PHY 芯片。
I.MX6U-ALPHA 开发板 ENET1 上连接的 LAN8720A器件地址为 0X0,所示要修改 ENET1 网络驱动重点就三点:
①、 ENET1 复位引脚初始化。
②、 LAN8720A 的器件 ID。
③、 LAN8720 驱动
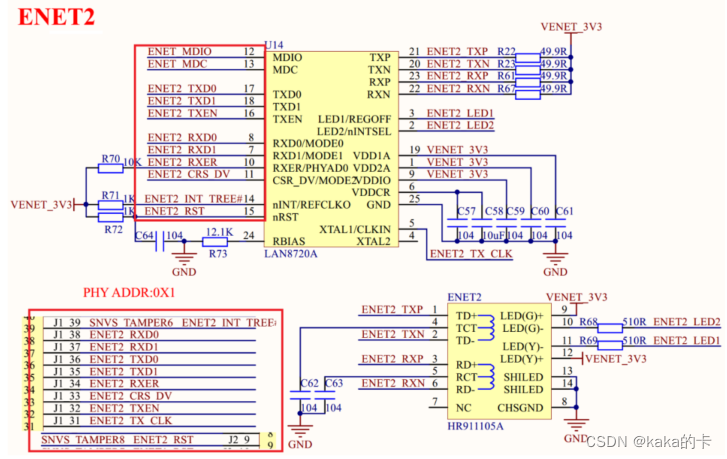
ENET2
关于 ENET2 网络驱动的修改也注意一下三点:
①、 ENET2 的复位引脚,ENET2 的复位引脚 ENET2_RST 接到了I.MX6ULL 的 SNVS_TAMPER8 上。
②、 ENET2 所使用的 PHY 芯片器件地址,PHY 器件地址为 0X1。
③、 LAN8720 驱动, ENET1 和 ENET2 都使用的 LAN8720,所以驱动是一样的。
2.2 网络 PHY 地址修改
首先修改 uboot 中的 ENET1 和 ENET2 的 PHY 地址和驱动,打开 mx6ull_myboard.h这个文件,找到如下代码:
#define CONFIG_FEC_ENET_DEV 1#if (CONFIG_FEC_ENET_DEV == 0)
#define IMX_FEC_BASE ENET_BASE_ADDR
#define CONFIG_FEC_MXC_PHYADDR 0x2
#define CONFIG_FEC_XCV_TYPE RMII
#elif (CONFIG_FEC_ENET_DEV == 1)
#define IMX_FEC_BASE ENET2_BASE_ADDR
#define CONFIG_FEC_MXC_PHYADDR 0x1
#define CONFIG_FEC_XCV_TYPE RMII
#endif
#define CONFIG_ETHPRIME "FEC"#define CONFIG_PHYLIB
#define CONFIG_PHY_MICREL
#endif
-
第 331 行的宏 CONFIG_FEC_ENET_DEV 用于选择使用哪个网口,默认为 1,也就是选择ENET2
-
第 335 行为 ENET1 的 PHY 地址,默认是 0X2
-
第 339 行为 ENET2 的 PHY 地址,默认为 0x1
根据前面的分析可知,正点原子的 I.MX6U-ALPHA 开发板 ENET1 的 PHY 地址为0X0, ENET2 的 PHY 地址为 0X1,所以需要将第 335 行的宏 CONFIG_FEC_MXC_PHYADDR改为 0x0。
如果要使用 LAN8720A,那么就得将 CONFIG_PHY_MICREL 改为 CONFIG_PHY_SMSC,也就是使能 uboot 中的 SMSC 公司中的 PHY 驱动,因为 LAN8720A 就是 SMSC 公司生产的。
所以示例代码有三处要修改:
①、修改 ENET1 网络 PHY 的地址。
②、修改 ENET2 网络 PHY 的地址。
③、使能 SMSC 公司的 PHY 驱动。
修改后的网络 PHY 地址参数如下所示:
#define CONFIG_FEC_ENET_DEV 1#if (CONFIG_FEC_ENET_DEV == 0)
#define IMX_FEC_BASE ENET_BASE_ADDR
#define CONFIG_FEC_MXC_PHYADDR 0x0
#define CONFIG_FEC_XCV_TYPE RMII
#elif (CONFIG_FEC_ENET_DEV == 1)
#define IMX_FEC_BASE ENET2_BASE_ADDR
#define CONFIG_FEC_MXC_PHYADDR 0x1
#define CONFIG_FEC_XCV_TYPE RMII
#endif
#define CONFIG_ETHPRIME "FEC"#define CONFIG_PHYLIB
#define CONFIG_PHY_SMSC
#endif
2.3 删除 uboot 中 74LV595 的驱动代码
1、uboot 中网络 PHY 芯片地址修改完成以后就是网络复位引脚的驱动修改了,打开mx6ull_myboard.c,找到如下代码:
#define IOX_SDI IMX_GPIO_NR(5, 10)
#define IOX_STCP IMX_GPIO_NR(5, 7)
#define IOX_SHCP IMX_GPIO_NR(5, 11)
#define IOX_OE IMX_GPIO_NR(5, 8)
以 IOX 开头的宏定义是 74LV595 的相关 GPIO,因为 NXP 官方I.MX6ULL EVK 开发板使用 74LV595 来扩展 IO,两个网络的复位引脚就是由 74LV595 来控制的。正点原子的 I.MX6U-ALPHA 开发板并没有使用 74LV595,因此我们将代码的代码删除掉,替换为
#define ENET1_RESET IMX_GPIO_NR(5, 7)
#define ENET2_RESET IMX_GPIO_NR(5, 8)
NET1 的复位引脚连接到 SNVS_TAMPER7 上,对应 GPIO5_IO07, ENET2 的复位引脚连接到 SNVS_TAMPER8 上,对应 GPIO5_IO08。
2、继续在 mx6ull_myboard.c 中找到如下代码:
static iomux_v3_cfg_t const iox_pads[] = {/* IOX_SDI */MX6_PAD_BOOT_MODE0__GPIO5_IO10 | MUX_PAD_CTRL(NO_PAD_CTRL),/* IOX_SHCP */MX6_PAD_BOOT_MODE1__GPIO5_IO11 | MUX_PAD_CTRL(NO_PAD_CTRL),/* IOX_STCP */MX6_PAD_SNVS_TAMPER7__GPIO5_IO07 | MUX_PAD_CTRL(NO_PAD_CTRL),/* IOX_nOE */MX6_PAD_SNVS_TAMPER8__GPIO5_IO08 | MUX_PAD_CTRL(NO_PAD_CTRL),
};
示例代码是 74LV595 的 IO 配置参数结构体,将其删除掉。
3、继续在mx6ull_myboard.c 中找到函数 iox74lv_init
static void iox74lv_init(void)
{int i;gpio_direction_output(IOX_OE, 0);............gpio_direction_output(IOX_STCP, 1);
};void iox74lv_set(int index)
{int i;............gpio_direction_output(IOX_STCP, 1);
};
iox74lv_init 函数是 74LV595 的初始化函数, iox74lv_set 函数用于控制 74LV595 的 IO 输出电平,将这两个函数全部删除掉!
4、在 mx6ull_myboard.c 中找到 board_init 函数,此函数是板子初始化函数,会被board_init_r 调用, board_init 函数内容如下:
int board_init(void)
{.......imx_iomux_v3_setup_multiple_pads(iox_pads, ARRAY_SIZE(iox_pads));iox74lv_init();.......return 0;
}
board_init 会调用 imx_iomux_v3_setup_multiple_pads 和 iox74lv_init 这两个函数来初始化74lv595 的 GPIO,将这两行删除掉。
至此, mx6ull_myboard.c 中关于 74LV595 芯片的驱动代码都删除掉了,接下来就是添加 I.MX6U-ALPHA 开发板两个网络复位引脚了。
2.4 添加开发板网络复位引脚驱动
在 mx6ull_myboard.c 中找到如下所示代码:
static iomux_v3_cfg_t const fec1_pads[] = {MX6_PAD_GPIO1_IO06__ENET1_MDIO | MUX_PAD_CTRL(MDIO_PAD_CTRL),MX6_PAD_GPIO1_IO07__ENET1_MDC | MUX_PAD_CTRL(ENET_PAD_CTRL),........MX6_PAD_ENET1_RX_ER__ENET1_RX_ER | MUX_PAD_CTRL(ENET_PAD_CTRL),MX6_PAD_ENET1_RX_EN__ENET1_RX_EN | MUX_PAD_CTRL(ENET_PAD_CTRL),
};static iomux_v3_cfg_t const fec2_pads[] = {MX6_PAD_GPIO1_IO06__ENET2_MDIO | MUX_PAD_CTRL(MDIO_PAD_CTRL),MX6_PAD_GPIO1_IO07__ENET2_MDC | MUX_PAD_CTRL(ENET_PAD_CTRL),........MX6_PAD_ENET2_RX_EN__ENET2_RX_EN | MUX_PAD_CTRL(ENET_PAD_CTRL),MX6_PAD_ENET2_RX_ER__ENET2_RX_ER | MUX_PAD_CTRL(ENET_PAD_CTRL),
};
结构体数组 fec1_pads 和 fec2_pads 是 ENET1 和 ENET2 这两个网口的 IO 配置参数,在这两个数组中添加两个网口的复位 IO 配置参数,完成以后如下所示:
static iomux_v3_cfg_t const fec1_pads[] = {MX6_PAD_GPIO1_IO06__ENET1_MDIO | MUX_PAD_CTRL(MDIO_PAD_CTRL),MX6_PAD_GPIO1_IO07__ENET1_MDC | MUX_PAD_CTRL(ENET_PAD_CTRL),........MX6_PAD_ENET1_RX_ER__ENET1_RX_ER | MUX_PAD_CTRL(ENET_PAD_CTRL),MX6_PAD_ENET1_RX_EN__ENET1_RX_EN | MUX_PAD_CTRL(ENET_PAD_CTRL),MX6_PAD_SNVS_TAMPER7__GPIO5_IO07 | MUX_PAD_CTRL(NO_PAD_CTRL), /* 初始化ETH1 RESET引脚 */
};static iomux_v3_cfg_t const fec2_pads[] = {MX6_PAD_GPIO1_IO06__ENET2_MDIO | MUX_PAD_CTRL(MDIO_PAD_CTRL),MX6_PAD_GPIO1_IO07__ENET2_MDC | MUX_PAD_CTRL(ENET_PAD_CTRL),........MX6_PAD_ENET2_RX_EN__ENET2_RX_EN | MUX_PAD_CTRL(ENET_PAD_CTRL),MX6_PAD_ENET2_RX_ER__ENET2_RX_ER | MUX_PAD_CTRL(ENET_PAD_CTRL),MX6_PAD_SNVS_TAMPER8__GPIO5_IO08 | MUX_PAD_CTRL(NO_PAD_CTRL), /* 初始化ETH2 RESET引脚 */
};
别是 ENET1 和 ENET2 的复位 IO 配置参数。
继续在文件 mx6ull_myboard.c 中找到函数 setup_iomux_fec,此函数默认代码如下:
static void setup_iomux_fec(int fec_id)
{if (fec_id == 0)imx_iomux_v3_setup_multiple_pads(fec1_pads,ARRAY_SIZE(fec1_pads));elseimx_iomux_v3_setup_multiple_pads(fec2_pads,ARRAY_SIZE(fec2_pads));
}
函数 setup_iomux_fec 就是根据 fec1_pads 和 fec2_pads 这两个网络 IO 配置数组来初始化I.MX6ULL 的网络 IO。需要在其中添加网络复位 IO 的初始化代码,并且复位一下 PHY 芯片,修改后的 setup_iomux_fec 函数如下:
static void setup_iomux_fec(int fec_id)
{if (fec_id == 0){imx_iomux_v3_setup_multiple_pads(fec1_pads,ARRAY_SIZE(fec1_pads));gpio_direction_output(ENET1_RESET, 1);gpio_set_value(ENET1_RESET, 0);mdelay(100);gpio_set_value(ENET1_RESET, 1);}else{imx_iomux_v3_setup_multiple_pads(fec2_pads,ARRAY_SIZE(fec2_pads));gpio_direction_output(ENET2_RESET, 1);gpio_set_value(ENET2_RESET, 0);mdelay(100);gpio_set_value(ENET2_RESET, 1);}}
分别对应 ENET1 和 ENET2 的复位 IO 初始化,将这两个 IO 设置为输出并且硬件复位一下 LAN8720A
2.5 更新 PHY 的连接状态和速度
打开文件drivers/net/phy/phy.c,找到函数 genphy_update_link,这是个通用 PHY 驱动函数,此函数用于更新 PHY 的连接状态和速度。使用 LAN8720A 的时候需要在此函数中添加一些代码,修改后的函数 genphy_update_link 如下所示:
nt genphy_update_link(struct phy_device *phydev)
{unsigned int mii_reg;
#ifdef CONFIG_PHY_SMSCstatic int lan8720_flag = 0;int bmcr_reg = 0;if(lan8720_flag == 0){bmcr_reg = phy_read(phydev, MDIO_DEVAD_NONE, MII_BMCR); /* Read the default value of BCMR register */phy_write(phydev, MDIO_DEVAD_NONE, MII_BMCR, BMCR_RESET); /* Software reset*/mdelay(10);phy_write(phydev, MDIO_DEVAD_NONE, MII_BMCR, bmcr_reg); /* Write the default value to BCMR register */lan8720_flag = 1;}
#endif
2.6 烧写调试
至此网络的复位引脚驱动修改完成,重新编译 uboot,然后将 u-boot.bin 烧写到 SD 卡中并启动, uboot 启动信息
U-Boot 2016.03 (Jun 26 2023 - 22:07:29 +0800)U-Boot 2016.03 (Jun 26 2023 - 22:21:59 +0800)CPU: Freescale i.MX6ULL rev1.1 69 MHz (running at 396 MHz)
CPU: Industrial temperature grade (-40C to 105C) at 48C
Reset cause: WDOG
Board: MX6ULL 14x14 EVK
I2C: ready
DRAM: 512 MiB
MMC: FSL_SDHC: 0, FSL_SDHC: 1
Display: TFT7016 (1024x600)
Video: 1024x600x24
In: serial
Out: serial
Err: serial
switch to partitions #0, OK
mmc0 is current device
Net: FEC1
Error: FEC1 address not set.Normal Boot
Hit any key to stop autoboot: 0
可以看到“Net: FEC1”这一行,提示当前使用的 FEC1 这个网口,也就是 ENET2。
配置u-boot中环境变量设置命令如下所示:
setenv ipaddr 192.168.1.50
setenv ethaddr b8:ae:1d:01:00:00
setenv gatewayip 192.168.1.1
setenv netmask 255.255.255.0
setenv serverip 192.168.1.253
saveenv
=> ping 192.168.1.253
FEC1 Waiting for PHY auto negotiation to complete.... done
Using FEC1 device
host 192.168.1.253 is alive
有“host 192.168.1.250 is alive”这句,说明 ping 主机成功,说明ENET2网络工作正常。
2.7 测试一下 ENET1
打开 mx6ull_alientek_emmc.h,将 CONFIG_FEC_ENET_DEV 改为 0,然后重新编译一下 uboot 并烧写到 SD 卡中重启。重启开发板,
U-Boot 2016.03 (Jun 26 2023 - 22:21:59 +0800)CPU: Freescale i.MX6ULL rev1.1 69 MHz (running at 396 MHz)
CPU: Industrial temperature grade (-40C to 105C) at 48C
Reset cause: WDOG
Board: MX6ULL 14x14 EVK
I2C: ready
DRAM: 512 MiB
MMC: FSL_SDHC: 0, FSL_SDHC: 1
Display: TFT7016 (1024x600)
Video: 1024x600x24
In: serial
Out: serial
Err: serial
switch to partitions #0, OK
mmc0 is current device
Net: FEC0
Normal Boot
Hit any key to stop autoboot: 0
有“Net: FEC0”这一行,说明当前使用的 FEC0 这个网卡,也就是ENET1,同样的 ping 一下主机
=> ping 192.168.1.253
FEC0 Waiting for PHY auto negotiation to complete.... done
Using FEC0 device
host 192.168.1.253 is alive
ping 主机也成功,说明 ENET1 网络也工作正常,至此, I.MX6UALPHA 开发板的两个网络都工作正常了
2.8 其他需要修改的地方
在 uboot 启动信息中会有“Board: MX6ULL 14x14 EVK”这一句,也就是说板子名字为“ MX6ULL 14x14 EVK”,要将其改为我们所使用的板子名字,比如“ MX6ULL MYBOARD”。打开文件 mx6ull_myboard.c,找到函数checkboard,将其改为如下所示内容:
int checkboard(void)
{if (is_mx6ull_9x9_evk())puts("Board: MX6ULL 9x9 EVK\n");elseputs("Board: MX6ULL MYBOARD\n");return 0;
}
U-Boot 2016.03 (Jun 26 2023 - 22:39:30 +0800)CPU: Freescale i.MX6ULL rev1.1 69 MHz (running at 396 MHz)
CPU: Industrial temperature grade (-40C to 105C) at 42C
Reset cause: POR
Board: MX6ULL MYBOARD
I2C: ready
DRAM: 512 MiB
MMC: FSL_SDHC: 0, FSL_SDHC: 1
Display: TFT7016 (1024x600)
Video: 1024x600x24
In: serial
Out: serial
Err: serial
switch to partitions #0, OK
mmc0 is current device
Net: FEC1
Normal Boot
Hit any key to stop autoboot: 0
相关文章:
U-Boot移植 (2)- LCD 驱动修改和网络驱动修改
文章目录 1. LCD 驱动修改1.1 修改c文件配置1.2 修改h文件配置1.3 编译测试 2. 网络驱动修改2.1 I.MX6U-ALPHA 开发板网络简介2.2 网络 PHY 地址修改2.3 删除 uboot 中 74LV595 的驱动代码2.4 添加开发板网络复位引脚驱动2.5 更新 PHY 的连接状态和速度2.6 烧写调试2.7 测试一下…...

Ubuntu 23.10 现在由Linux内核6.3提供支持
对于那些希望在Ubuntu上尝试最新的Linux 6.3内核系列的人来说,今天有一个好消息,因为即将发布的Ubuntu 23.10(Mantic Minotaur)已经重新基于Linux内核6.3。 Ubuntu 23.10的开发工作于4月底开始,基于目前的临时版本Ubu…...

Python 学习之NumPy(一)
文章目录 1.为什么要学习NumPy2.NumPy的数组变换以及索引访问3.NumPy筛选使用介绍筛选出上面nb数组中能被3整除的所有数筛选出数组中小于9的所有数提取出数组中所有的奇数数组中所有的奇数替换为-1二维数组交换2列生成数值5—10,shape 为(3,5)的二维随机浮点数 NumP…...
Nftables栈溢出漏洞(CVE-2022-1015)复现
背景介绍 Nftables Nftables 是一个基于内核的包过滤框架,用于 Linux 操作系统中的网络安全和防火墙功能。nftables 的设计目标是提供一种更简单、更灵活和更高效的方式来管理网络数据包的流量。 钩子点(Hook Point) 钩子点的作用是拦截数…...
【C++】 Qt-事件(上)(事件、重写事件、事件分发)
文章目录 事件重写事件事件分发 事件 事件(event)是由系统或Qt本身在不同的时刻发出的。比如,当用户按下鼠标,敲下键盘,或窗口需要重新绘制的时候,都会发出一个相应的事件。一些事件是在对用户操作做出响应…...
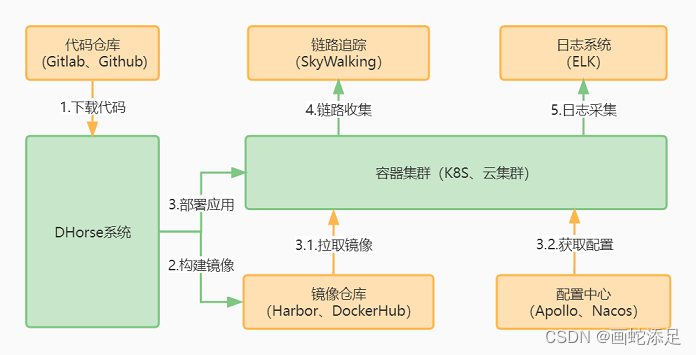
k8s部署springboot
前言 首先以SpringBoot应用为例介绍一下k8s的部署步骤。 1.从代码仓库下载代码,比如GitLab; 2.接着是进行打包,比如使用Maven; 3.编写Dockerfile文件,把步骤2产生的包制作成镜像; 4.上传步骤3的镜像到远程…...

备战秋招002(20230704)
文章目录 前言一、今天学习了什么?二、关于问题的答案1.线程池2.synchronized关键字3、volatile 总结 前言 提示:这里为每天自己的学习内容心情总结; Learn By Doing,Now or Never,Writing is organized thinking. …...

游泳买耳机买什么的比较好,列举几款实战性好的游泳耳机
对于运动用户来说,在运动时都会选择听一些节奏感比较强的音乐,让自己运动是更有活力。现在已经是三伏天中的前伏期间,不少人会选择在三伏天的日子里进行减肥瘦身,耳游泳已经成为很多人都首选运动,游泳是非常好的有氧运…...
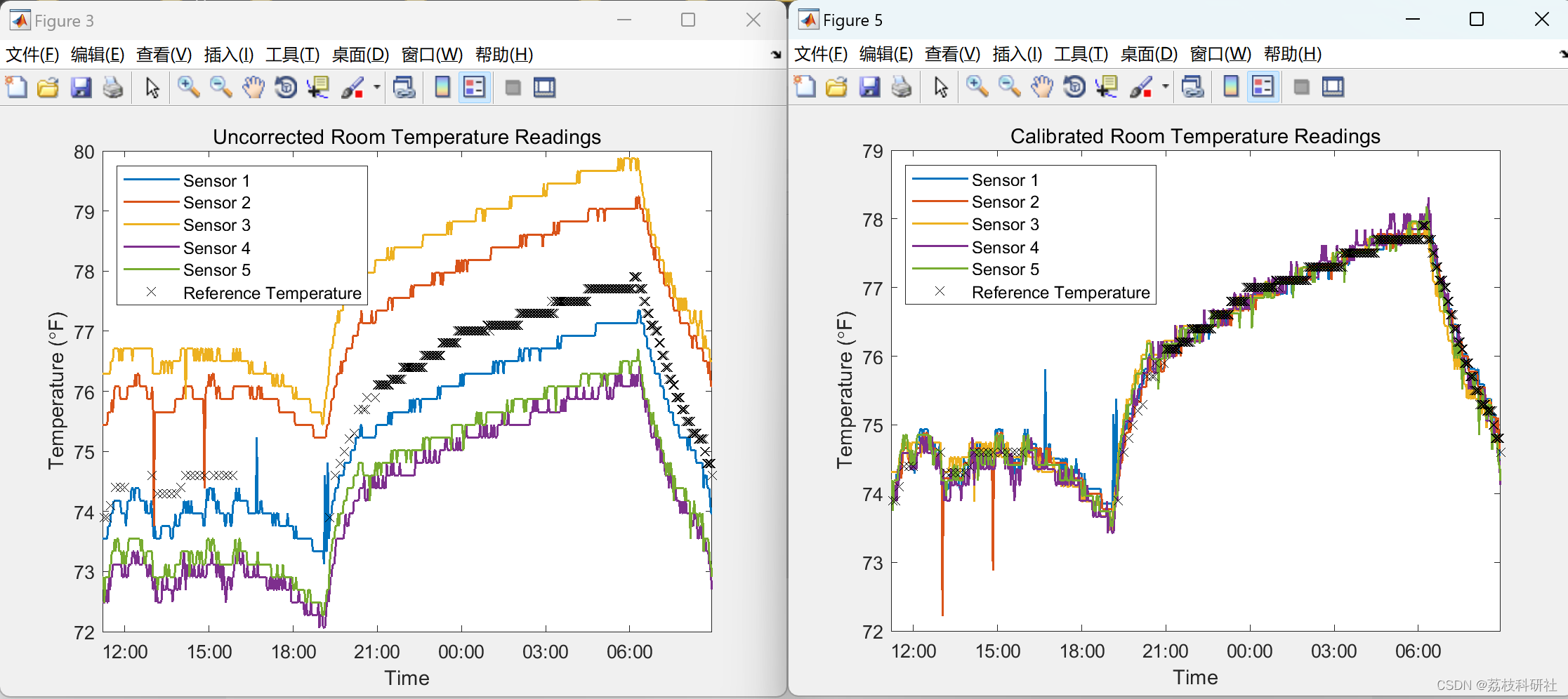
【无线传感器】使用 MATLAB和 XBee连续监控温度传感器无线网络研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

Java基础-多线程JUC-生产者和消费者
1. 生产者与消费者 实现线程轮流交替执行的结果; 实现线程休眠和唤醒均要使用到锁对象; 修改标注位(foodFlag); 代码实现: public class demo11 {public static void main(String[] args) {/*** 需求&#…...
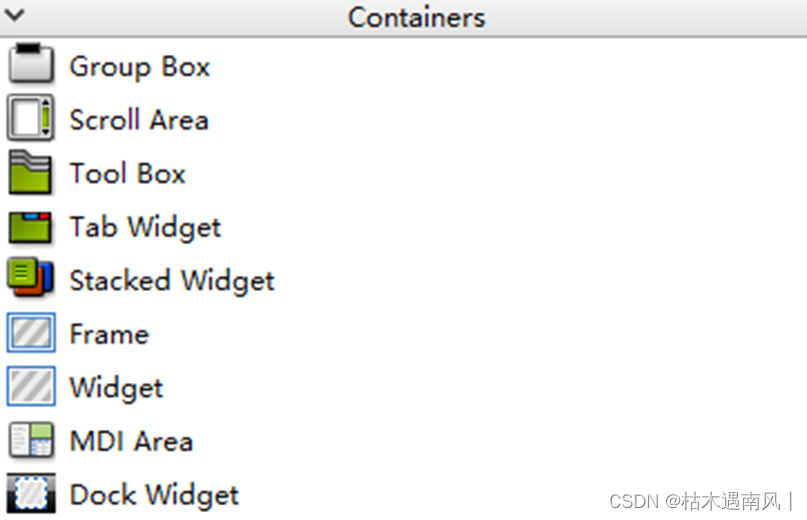
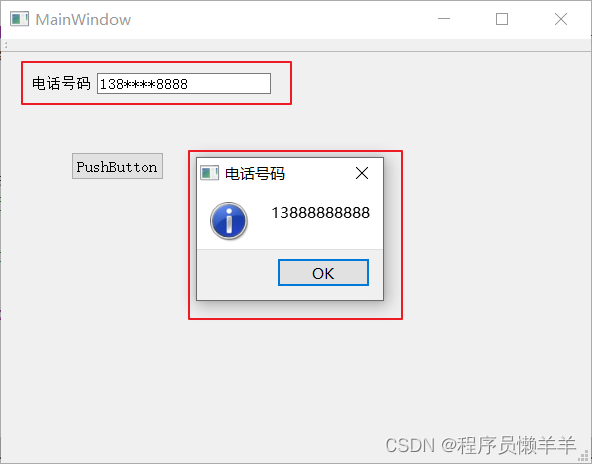
day2 QT按钮与容器
目录 按钮 1、QPushButton 2、QToolButton 3、QRadioButton 4、QCheckBox 示例 容器 编辑 1. QGroupBox(分组框) 2. QScrollArea(滚动区域) 3. QToolBox(工具箱) 4. QTabWidget(选…...
JPA 批量插入较大数据 解决性能慢问题
JPA 批量插入较大数据 解决性能慢问题 使用jpa saveAll接口的话需要了解原理: TransactionalOverridepublic <S extends T> List<S> saveAll(Iterable<S> entities) {Assert.notNull(entities, "Entities must not be null!");List<…...

为啥离不了 linux
Linux与Windows都是十分常见的电脑操作系统,相信你对它们二者都有所了解!在你的使用过程中,是否有什么事让你觉得在Linux上顺理成章,换到Windows上就令你费解?亦或者关于这二者你有任何想要分享的,都可以在…...

基于分形的置乱算法和基于混沌系统的置乱算法哪种更安全?
在信息安全领域中,置乱算法是一种重要的加密手段,它可以将明文进行混淆和打乱,从而实现保密性和安全性。常见的置乱算法包括基于分形的置乱算法和基于混沌系统的置乱算法。下面将从理论和实践两方面,对这两种置乱算法进行比较和分…...

pve使用cloud-image创建ubuntu模板
首先连接pve主机的终端 下载ubuntu22.04的cloud-image镜像 wget -P /opt https://mirrors.cloud.tencent.com/ubuntu-cloud-images/jammy/current/jammy-server-cloudimg-amd64.img创建虚拟机,id设为9000,使用VirtIO SCSI控制器 qm create 9000 -core…...
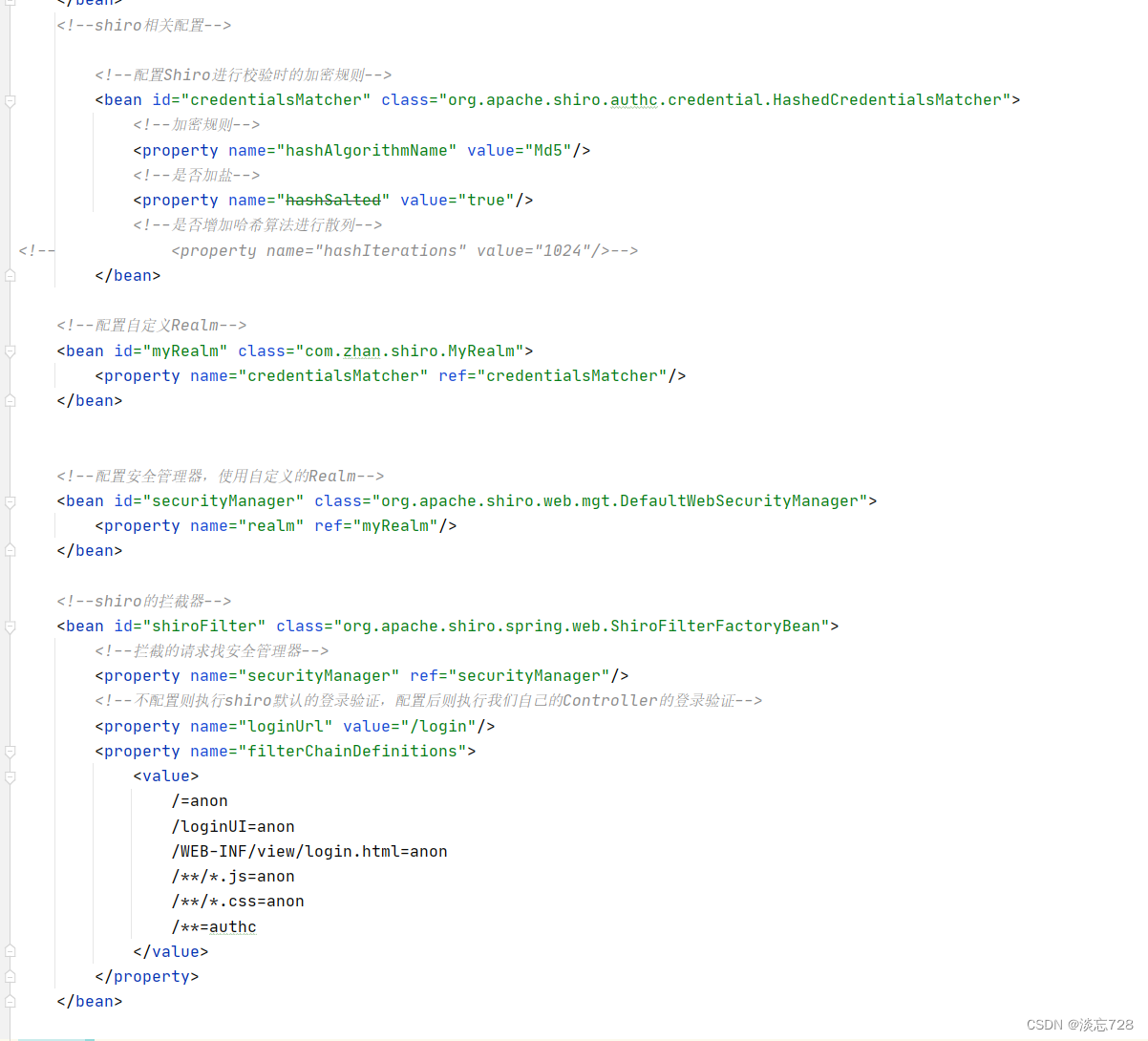
shiro入门
1、概述 Apache Shiro 是一个功能强大且易于使用的 Java 安全(权限)框架。借助 Shiro 您可以快速轻松地保护任何应用程序一一从最小的移动应用程序到最大的 Web 和企业应用程序。 作用:Shiro可以帮我们完成 :认证、授权、加密、会话管理、与 Web 集成、…...
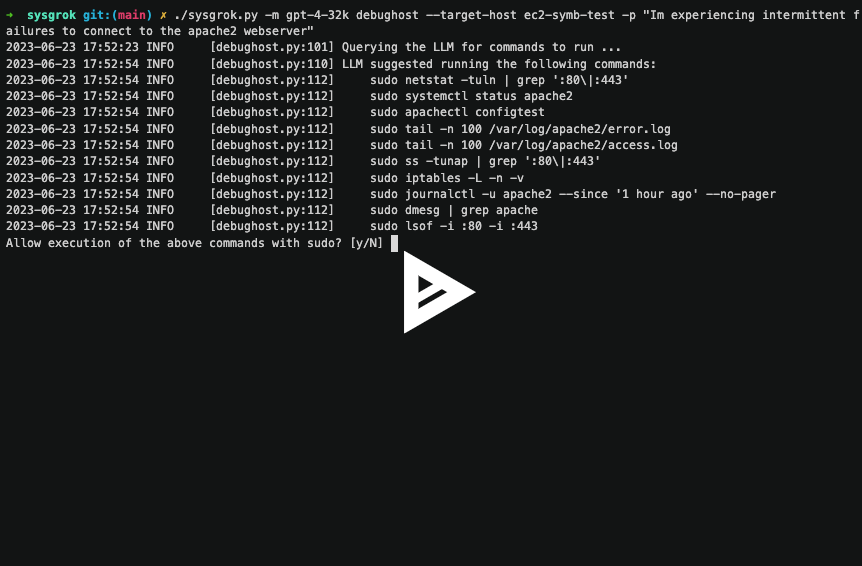
开源 sysgrok — 用于分析、理解和优化系统的人工智能助手
作者:Sean Heelan 在这篇文章中,我将介绍 sysgrok,这是一个研究原型,我们正在研究大型语言模型 (LLM)(例如 OpenAI 的 GPT 模型)如何应用于性能优化、根本原因分析和系统工程领域的问题。 你可以在 GitHub …...

Gitlab保护分支与合并请求
目录 引言 1、成员角色指定 1、保护分支设置 2、合并请求 引言 熟悉了Git工作流之后,有几个重要的分支,如Master(改名为Main)、Develop、Release分支等,是禁止开发成员随意合并和提交的,在此分支上的提交和推送权限仅限项目负责…...

ad18学习笔记九:输出文件
一般来说提供给板卡厂的文件里要包括以下这些文件 1、装配图 2、bom文件 3、gerber文件 4、转孔文件 5、坐标文件 6、ipc网表 AD_PCB:Gerber等各类文件的输出 - 哔哩哔哩 原点|钻孔_硬件设计AD 生成 Gerber 文件 1、装配图 如何输出装配图? 【…...

PostgreSQL 内存配置 与 MemoryContext 的生命周期
PostgreSQL 内存配置与MemoryContext的生命周期 PG/GP 内存配置 数据库可用的内存 gp_vmem 整个 GP 数据库可用的内存 gp_vmem: >>> RAM 128 * GB >>> gp_vmem ((SWAP RAM) - (7.5*GB 0.05 * RAM)) / 1.7 >>> print(gp_vmem / G…...

Ostrakon-VL-8B LaTeX文档自动化:将手写公式草图转换为排版代码
Ostrakon-VL-8B LaTeX文档自动化:将手写公式草图转换为排版代码 每次写论文或者报告,最头疼的部分是什么?对我而言,绝对是敲那些复杂的LaTeX公式。一个积分符号、一个分式结构,往往要花上好几分钟去回忆语法、调整括号…...

从工作流到超级智能体,Claude Code 重构AI应用底层逻辑
从工作流到超级智能体,Claude Code 重构AI应用底层逻辑 当AI应用从简单的对话交互,逐步演进到复杂的自动化工作流,再到如今的自主智能体时代,行业始终在探寻更高效、更智能的系统架构范式。Anthropic推出的Claude Code,…...

从云端到指尖:巧用Aspose组件实现Office/PDF文档秒级HTML预览,攻克移动端大文件访问瓶颈
1. 移动端大文件预览的痛点与解决思路 最近接手一个企业级项目时,遇到了一个非常典型的场景:用户通过PC端上传各种办公文档(Word、Excel、PPT、PDF),需要在移动端随时查看。但当文件体积较大时(比如超过50M…...
)
避坑指南:QT5的QListView复选框居中/对齐问题解决方案(含TableView对比)
QT5复选框对齐终极指南:从QListView到TableView的完美排版方案 在QT5界面开发中,复选框控件的视觉对齐问题堪称"程序员强迫症终结者"——明明功能已经实现,却总在UI细节上栽跟头。本文将带您深入解决QListView和TableView中复选框居…...

炉石传说自动化脚本终极指南:从3小时到3分钟的游戏体验革命
炉石传说自动化脚本终极指南:从3小时到3分钟的游戏体验革命 【免费下载链接】Hearthstone-Script Hearthstone script(炉石传说脚本)(2024.01.25停更至国服回归) 项目地址: https://gitcode.com/gh_mirrors/he/Heart…...

Lingbot-Depth-Pretrain-ViTL-14 Anaconda环境搭建:创建隔离的Python开发与推理环境
Lingbot-Depth-Pretrain-ViTL-14 Anaconda环境搭建:创建隔离的Python开发与推理环境 你是不是也遇到过这种情况:好不容易跟着教程跑通了一个AI项目,结果过两天想跑另一个项目时,发现各种库版本冲突,报错满天飞&#x…...

正交试验DOE在算法参数优化中的高效应用
1. 正交试验DOE:算法调参的"聪明捷径" 第一次接触算法参数优化时,我像大多数人一样陷入了暴力搜索的陷阱。记得当时调一个简单的随机森林模型,5个参数各试5个值,总共需要3125次训练!直到发现正交试验设计&am…...

QRCoder:开发者必备的二维码生成解决方案全攻略
QRCoder:开发者必备的二维码生成解决方案全攻略 【免费下载链接】QRCoder A pure C# Open Source QR Code implementation 项目地址: https://gitcode.com/gh_mirrors/qr/QRCoder 在数字化时代,二维码已成为信息传递的重要桥梁,但如何…...

NetCoreServer高级特性揭秘:自定义协议、会话管理和扩展机制
NetCoreServer高级特性揭秘:自定义协议、会话管理和扩展机制 【免费下载链接】NetCoreServer Ultra fast and low latency asynchronous socket server & client C# .NET Core library with support TCP, SSL, UDP, HTTP, HTTPS, WebSocket protocols and 10K c…...

抖音内容一键保存:3分钟搞定无水印批量下载完整指南
抖音内容一键保存:3分钟搞定无水印批量下载完整指南 【免费下载链接】douyin-downloader 项目地址: https://gitcode.com/GitHub_Trending/do/douyin-downloader 你是不是也遇到过这样的烦恼?看到精彩的抖音视频想保存下来反复学习,却…...