stm32驱动MCP2515芯片,项目已通过测试
最近公司做一个项目,需要3路can通道,但是stm32看了很久,最多也就只有2个can,所以找到了一款MCP2515芯片,可以用spi驱动can。
已经实现了can的发送和接收,接收采用的是外部中断接收的方式。和单片机本身带的can功能一样。
还有就是要注意的是CAN的接收是通过外部中断引脚下拉来确定接收缓冲器接收到数据,可以通过设置接收屏蔽和滤波。
spi的初始化就不介绍 直接放出MCP2515的关键代码
首先是MCP2515的头文件 主要是一些宏定义和API
#ifndef MCP2515_H_
#define MCP2515_H_
#include "stm32f10x.h"#define USE_INT_STAT 1 // use INT pin indicate recived data//MCP2515 RX/TX buffers selection
#define MCP2515_RX_BUF_0 0
#define MCP2515_RX_BUF_1 1
#define MCP2515_TX_BUF_0 0
#define MCP2515_TX_BUF_1 1
#define MCP2515_TX_BUF_2 2//MCP2515 SPI instructions
#define MCP2515_RESET 0xC0
#define MCP2515_READ 0x03
#define MCP2515_READ_BUF_RXB0SIDH 0x90 //read data from begin address of Standard ID (MSB) of RX buffer 0
#define MCP2515_READ_BUF_RXB0D0 0x92 //read data from begin address of data byte 0 of RX buffer 0
#define MCP2515_READ_BUF_RXB1SIDH 0x94 //...RX buffer 1
#define MCP2515_READ_BUF_RXB1D0 0x96 //...RX buffer 1
#define MCP2515_WRITE 0x02
#define MCP2515_LOAD_BUF_TXB0SIDH 0x40 //load data from begin address of Standard ID (MSB) of TX buffer 0
#define MCP2515_LOAD_BUF_TXB0D0 0X41 //load data from begin address of data byte 0 of TX buffer 0
#define MCP2515_LOAD_BUF_TXB1SIDH 0x42 //...TX buffer 1
#define MCP2515_LOAD_BUF_TXB1D0 0X43 //...TX buffer 1
#define MCP2515_LOAD_BUF_TXB2SIDH 0x44 //...TX buffer 2
#define MCP2515_LOAD_BUF_TXB2D0 0X45 //...TX buffer 2
#define MCP2515_RTS_TXB0 0x81 //activate the RTS of TX buffer 0.
#define MCP2515_RTS_TXB1 0x82 //...TX buffer 1.
#define MCP2515_RTS_TXB2 0x84 //...TX buffer 2.
#define MCP2515_RTS_ALL 0x87 //...TX buffer 0, 1 and 2.
#define MCP2515_READ_RXTX_STATUS 0xA0
#define MCP2515_RX_STATUS 0xB0
#define MCP2515_BIT_MODIFY 0x05//MCP2515 control settings register address.
//All can be used with the Bit Modify command, except the CANSTAT register.
#define MCP2515_BFPCTRL 0x0C //RXnBF pin control/status
#define MCP2515_TXRTSCTRL 0x0D //TXnRTS pin control/status
#define MCP2515_CANSTAT 0x0E //CAN status. any addr of MSB will give the same info???
#define MCP2515_CANCTRL 0x0F //CAN control status. any addr of MSB will give the same info???
#define MCP2515_TEC 0x1C //Transmit Error Counter
#define MCP2515_REC 0x1D //Receive Error Counter
#define MCP2515_CNF3 0x28 //Phase segment 2
#define MCP2515_CNF2 0x29 //Propagation segment & Phase segment 1 & n sample setting
#define MCP2515_CNF1 0x2A //Baud rate prescaler & Sync Jump Width
#define MCP2515_CANINTE 0x2B //CAN interrupt enable
#define MCP2515_CANINTF 0x2C //Interrupt flag
#define MCP2515_EFLG 0x2D //Error flag
#define MCP2515_TXB0CTRL 0x30 //TX buffer 0 control
#define MCP2515_TXB1CTRL 0x40 //TX buffer 1 control
#define MCP2515_TXB2CTRL 0x50 //TX buffer 2 control
#define MCP2515_RXB0CTRL 0x60 //RX buffer 0 control
#define MCP2515_RXB1CTRL 0x70 //RX buffer 1 control//MCP2515 relate to CAN settings/status register address.
//Only the most used are listed below. please see the datasheet MCP2515.pdf p61 for complete info.
#define MCP2515_RXF0SIDH 0x00 //RX standard ID (High bits) filter 0
#define MCP2515_RXF0SIDL 0x01 //RX standard ID (Low bits) filter 0
#define MCP2515_RXF0EID8 0x02 //RX Extended ID (High bits) filter 0 ->can be reached by bust read/write Standard ID then Ext. ID
#define MCP2515_RXF0EID0 0x03 //RX Extended ID (Low bits) filter 0
#define MCP2515_RXF1SIDH 0x04 //RX standard ID (High bits) filter 1
#define MCP2515_RXF1SIDL 0x05 //RX standard ID (Low bits) filter 1
#define MCP2515_RXF1EID8 0x06 //RX Extended ID (High bits) filter 1
#define MCP2515_RXF1EID0 0x07 //RX Extended ID (Low bits) filter 1
#define MCP2515_RXF2SIDH 0x08 //RX standard ID (High bits) filter 2
#define MCP2515_RXF2SIDL 0x09 //RX standard ID (Low bits) filter 2
#define MCP2515_RXF2EID8 0x0A //RX Extended ID (High bits) filter 2
#define MCP2515_RXF2EID0 0x0B //RX Extended ID (Low bits) filter 2
#define MCP2515_RXF3SIDH 0x10 //RX standard ID (High bits) filter 3
#define MCP2515_RXF3SIDL 0x11 //RX standard ID (Low bits) filter 3
#define MCP2515_RXF3EID8 0x12 //RX Extended ID (High bits) filter 3
#define MCP2515_RXF3EID0 0x13 //RX Extended ID (Low bits) filter 3
#define MCP2515_RXF4SIDH 0x14 //RX standard ID (High bits) filter 4
#define MCP2515_RXF4SIDL 0x15 //RX standard ID (Low bits) filter 4
#define MCP2515_RXF4EID8 0x16 //RX Extended ID (High bits) filter 4
#define MCP2515_RXF4EID0 0x17 //RX Extended ID (Low bits) filter 4
#define MCP2515_RXF5SIDH 0x18 //RX standard ID (High bits) filter 5
#define MCP2515_RXF5SIDL 0x19 //RX standard ID (Low bits) filter 5
#define MCP2515_RXF5EID8 0x1A //RX Extended ID (High bits) filter 5
#define MCP2515_RXF5EID0 0x1B //RX Extended ID (Low bits) filter 5
#define MCP2515_RXM0SIDH 0x20 //RX standard ID (High bits) mask filter 0
#define MCP2515_RXM0SIDL 0x21 //RX standard ID (Low bits) mask filter 0
#define MCP2515_RXM0EID8 0x22 //RX Extended ID (High bits) mask filter 0
#define MCP2515_RXM0EID0 0x23 //RX Extended ID (Low bits) mask filter 0
#define MCP2515_RXM1SIDH 0x24 //RX standard ID (High bits) mask filter 1
#define MCP2515_RXM1SIDL 0x25 //RX standard ID (Low bits) mask filter 1
#define MCP2515_RXM1EID8 0x26 //RX Extended ID (High bits) mask filter 1
#define MCP2515_RXM1EID0 0x27 //RX Extended ID (Low bits) mask filter 1
#define MCP2515_RXB0SIDH 0x61 //RX buffer 0 standard ID (High bits)
#define MCP2515_RXB0SIDL 0x62 //RX buffer 0 standard ID (Low bits)
#define MCP2515_RXB0EID8 0x63 //RX buffer 0 Extended ID (High bits) ->can be reached by bust read/write Standard ID then Ext. ID
#define MCP2515_RXB0EID0 0x64 //RX buffer 0 Extended ID (Low bits)
#define MCP2515_RXB0DLC 0x65 //RX buffer 0 DLC ->can be reached by bust read/write Standard ID, Ext. ID then DLC
#define MCP2515_RXB0D0 0x66 //RX buffer 0 data byte0
#define MCP2515_RXB1SIDH 0x71 //RX buffer 1 standard ID (High bits)
#define MCP2515_RXB1SIDL 0x72 //RX buffer 1 standard ID (Low bits)
#define MCP2515_RXB1EID8 0x73 //RX buffer 1 Extended ID (High bits)
#define MCP2515_RXB1EID0 0x74 //RX buffer 1 Extended ID (Low bits)
#define MCP2515_RXB1DLC 0x75 //RX buffer 1 DLC
#define MCP2515_RXB1D0 0x76 //RX buffer 1 data byte0#define MCP2515_TXB0SIDH 0x31 //TX buffer 0 standard ID (High bits)
#define MCP2515_TXB0SIDL 0x32 //TX buffer 0 standard ID (Low bits)
#define MCP2515_TXB0EID8 0x33 //TX buffer 0 Extended ID (High bits) ->can be reached by bust read/write Standard ID then Ext. ID
#define MCP2515_TXB0EID0 0x34 //TX buffer 0 Extended ID (Low bits)
#define MCP2515_TXB0DLC 0x35 //TX buffer 0 DLC ->can be reached by bust read/write Standard ID, Ext. ID then DLC
#define MCP2515_TXB0D0 0x36 //TX buffer 0 data byte0
#define MCP2515_TXB1SIDH 0x41 //TX buffer 1 standard ID (High bits)
#define MCP2515_TXB1SIDL 0x42 //TX buffer 1 standard ID (Low bits)
#define MCP2515_TXB1EID8 0x43 //TX buffer 1 Extended ID (High bits)
#define MCP2515_TXB1EID0 0x44 //TX buffer 1 Extended ID (Low bits)
#define MCP2515_TXB1DLC 0x45 //TX buffer 1 DLC
#define MCP2515_TXB1D0 0x46 //TX buffer 1 data byte0
#define MCP2515_TXB2SIDH 0x51 //TX buffer 2 standard ID (High bits)
#define MCP2515_TXB2SIDL 0x52 //TX buffer 2 standard ID (Low bits)
#define MCP2515_TXB2EID8 0x53 //TX buffer 2 Extended ID (High bits)
#define MCP2515_TXB2EID0 0x54 //TX buffer 2 Extended ID (Low bits)
#define MCP2515_TXB2DLC 0x55 //TX buffer 2 DLC
#define MCP2515_TXB2D0 0x56 //TX buffer 2 data byte0//MCP2515 limit values
#define MCP2515_MIN_TQ 0x07 //7 = Minimum TQ in 1 bit of CAN bus time
#define MCP2515_MAX_TQ 0x19 //25 = Maximum TQ in 1 bit of CAN bus time
#define MCP2515_MIN_BRP 0x00 //0 = Minimum baud rate prescaler clock
#define MCP2515_MAX_BRP 0x3F //63 = Maximum baud rate prescaler clock
#define MCP2515_MAX_SJW 0x03 //4 = Maximum Synchronization Jump Width. 4-1 = 3 actually
#define MCP2515_MAX_BYTE_CANFRM 0x08//8 = Maximun bytes in a CAN frame//MCP2515 register values: CANCTRL register
#define MCP2515_MODE_NORMAL 0x00
#define MCP2515_MODE_SLEEP 0x20
#define MCP2515_MODE_LOOPBACK 0x40
#define MCP2515_MODE_LISTENONLY 0x60
#define MCP2515_MODE_CONFIG 0x80
#define MCP2515_ABORT_TX 0x10
#define MCP2515_MODE_MASK 0xE0
#define MCP2515_MODE_ONESHOT 0x08
#define MCP2515_CLKOUT_ENABLE 0x04
#define MCP2515_CLKOUT_PS1 0x00 //Set CLK out prescaler to 1. Note: not the same as the CAN CLK prescaler.
#define MCP2515_CLKOUT_PS2 0x01 //... to 2
#define MCP2515_CLKOUT_PS4 0x02 //... to 4
#define MCP2515_CLKOUT_PS8 0x03 //... to 8//MCP2515 CAN Status Register bits (CANSTAT 0xXE, ICOD)
#define MCP2515_CANSTAT_NO_INT 0x00
#define MCP2515_CANSTAT_ERR_INT 0x02
#define MCP2515_CANSTAT_WAK_INT 0x04 //Wake-up Interrupt
#define MCP2515_CANSTAT_TXB0_INT 0x06
#define MCP2515_CANSTAT_TXB1_INT 0x08
#define MCP2515_CANSTAT_TXB2_INT 0x0A
#define MCP2515_CANSTAT_RXB0_INT 0x0C
#define MCP2515_CANSTAT_RXB1_INT 0x0E//MCP2515 CAN Interrupt Flag Define
#define MCP2515_CANINTF_MERRF 0x80
#define MCP2515_CANINTF_WAKIF 0x40
#define MCP2515_CANINTF_ERRIF 0x20
#define MCP2515_CANINTF_TX2IF 0x10
#define MCP2515_CANINTF_TX1IF 0x08
#define MCP2515_CANINTF_TX0IF 0x04
#define MCP2515_CANINTF_RX1IF 0x02
#define MCP2515_CANINTF_RX0IF 0x01#define MCP2515_CANINT_MERR 0x80
#define MCP2515_CANINT_WAKI 0x40
#define MCP2515_CANINT_ERRI 0x20
#define MCP2515_CANINT_TX2I 0x10
#define MCP2515_CANINT_TX1I 0x08
#define MCP2515_CANINT_TX0I 0x04
#define MCP2515_CANINT_RX1I 0x02
#define MCP2515_CANINT_RX0I 0x01#define MCP2515_CAN_Standard (0) /*!< Standard Id */
#define MCP2515_CAN_Extended (8) /*!< Extended Id */
/** * @brief MCP2515_CAN Tx message structure definition */typedef struct
{uint32_t StdId; /*!< Specifies the standard identifier.This parameter can be a value between 0 to 0x7FF. */uint32_t ExtId; /*!< Specifies the extended identifier.This parameter can be a value between 0 to 0x1FFFFFFF. */unsigned char IDE; /*!< Specifies the type of identifier for the message that will be transmitted. This parameter can be a value of @ref CAN_identifier_type */unsigned char RTR; /*!< Specifies the type of frame for the message that will be transmitted. This parameter can be a value of @ref CAN_remote_transmission_request */unsigned char DLC; /*!< Specifies the length of the frame that will be transmitted. This parameter can be a value between 0 to 8 */unsigned char Data[8]; /*!< Contains the data to be transmitted. It ranges from 0 to 0xFF. */
}MCP2515_CanTxMsg;/** * @brief MCP2515_CAN Rx message structure definition */typedef struct
{uint32_t StdId; /*!< Specifies the standard identifier.This parameter can be a value between 0 to 0x7FF. */uint32_t ExtId; /*!< Specifies the extended identifier.This parameter can be a value between 0 to 0x1FFFFFFF. */unsigned char IDE; /*!< Specifies the type of identifier for the message that will be received. This parameter can be a value of @ref CAN_identifier_type */unsigned char RTR; /*!< Specifies the type of frame for the received message.This parameter can be a value of @ref CAN_remote_transmission_request */unsigned char DLC; /*!< Specifies the length of the frame that will be received.This parameter can be a value between 0 to 8 */unsigned char Data[8]; /*!< Contains the data to be received. It ranges from 0 to 0xFF. */unsigned char FMI; /*!< Specifies the index of the filter the message stored in the mailbox passes through. This parameter can be a value between 0 to 0xFF */
}MCP2515_CanRxMsg;extern MCP2515_CanRxMsg MCP2515_Rxmsg;
extern MCP2515_CanTxMsg MCP2515_Txmsg;/*KEY API*/
void MCP2515_CAN_Init(unsigned char brp,unsigned char ps1,unsigned char ps2);
unsigned char MCP2515_CAN_ReceiveData(MCP2515_CanRxMsg * rxmsg);
void MCP2515_CAN_SendData(MCP2515_CanTxMsg *txmsg);
void CANINT_GPIO_Init(void);/*General API*/
void MCP2515_Reset(void);
unsigned char MCP2515_ReadByte(unsigned char addr);
void MCP2515_WriteByte(unsigned char addr,unsigned char data);
void MCP2515_BitModify(unsigned char Addr, unsigned char MASK, unsigned char data);
uint8_t MCP2515_Get_ReadStatus(void);
uint8_t MCP2515_Get_RxStatus(void);
void MCP2515_RTS(unsigned char TxBn);/*Set MCP2515*/
void MCP2515_SetCNF1(unsigned char data);
void MCP2515_SetCNF2(unsigned char data);
void MCP2515_SetCNF3(unsigned char data);
void MCP2515_SetMode(unsigned char data);
unsigned char MCP2515_GetCanStatus(void);/*TX API*/
void MCP2515_SetTXID(unsigned char TxBnID,MCP2515_CanTxMsg *txmsg);
void MCP2515_SetTXDLC(unsigned char TxBnDLC,MCP2515_CanTxMsg *txmsg);
void MCP2515_SetTXDATA(unsigned char TxBnDm,MCP2515_CanTxMsg *txmsg);/*RX API*/#endif /*MCP2515_H_*/接下来就是MCP2515的源文件代码 和头文件是对应的
#include "mcp2515.h"
#include "spi.h"
#include "System/Utils.h"
#include "GPIO/GPIO.h"
#include <stdio.h>MCP2515_CanRxMsg MCP2515_Rxmsg;
MCP2515_CanTxMsg MCP2515_Txmsg;void EXTI9_5_IRQHandler(void)
{if(!GPIO_ReadInputDataBit(GPIOD,GPIO_Pin_9)){/*can中断*/MCP2515_CAN_ReceiveData(&MCP2515_Rxmsg);}EXTI_ClearITPendingBit(EXTI_Line9); //清除LINE9上的中断标志位
}
void CANINT_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStructure;EXTI_InitTypeDef EXTI_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD|RCC_APB2Periph_AFIO,ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入GPIO_Init(GPIOD, &GPIO_InitStructure);//中断线以及中断初始化配置 下降沿触发GPIO_EXTILineConfig(GPIO_PortSourceGPIOD,GPIO_PinSource9); EXTI_InitStructure.EXTI_Line=EXTI_Line9;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitStructure.NVIC_IRQChannel = EXTI9_5_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x01; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure); }/********* * @brief MCP2515_CAN_Init* @param brp:0~63* @param ps1:0~7* @param ps2:1~7* Baudrate=Fosc/( 2+ (ps1+1) + (ps2+1) ) * 2*(1+brp) )* eg:brp=1 ps1=3 ps2=1Baudrate=8Mhz/(2+(3+1)+(1+1))*2*(1+1) =250Khz* eg:brp=0 ps1=3 ps2=1Baudrate=8Mhz/(2+(1+1)+(1+1))*2*(1+1) =250Khz* @retval none*/
void MCP2515_CAN_Init(unsigned char brp,unsigned char ps1,unsigned char ps2)
{这个是CAN初始化的代码 主要是配置CAN的波特率 模式 通道等具体代码可以小窗找我
}/********* * @brief Receive n bytes from MCP2515 RXB0* @param rxmsg:RxDataStruct* @retval Data:return the effectively data from RXB0*/
unsigned char MCP2515_CAN_ReceiveData(MCP2515_CanRxMsg * rxmsg)
{这个是CAN的接收函数 可以在中断中来读取这个API 得到接收的can数据具体代码可以小窗找我}
/********* * @brief Send n bytes to MCP2515 txb0* @param txmsg: data to be sent * @retval None*/
void MCP2515_CAN_SendData(MCP2515_CanTxMsg *txmsg)
{这个是CAN的发送函数 代入CAN的结构体参数就可以具体代码可以小窗找我
}//功能:复位MCP2515
void MCP2515_Reset(void)
{MC2515_CS(0);SPI_MCP2515_Write_Read(MCP2515_RESET);MC2515_CS(1);
}
//功能:读MCP2515的数据
//入口参数:Addr:寄存器地址
//返回值:寄存器地址中的数据
unsigned char MCP2515_ReadByte(unsigned char addr)
{unsigned char ReadData;MC2515_CS(0);SPI_MCP2515_Write_Read(MCP2515_READ);SPI_MCP2515_Write_Read(addr);ReadData=SPI_MCP2515_Write_Read(0xff);MC2515_CS(1);return ReadData;
}
//功能:读MCP2515的寄存器
//入口参数:Addr:寄存器地址 data:数据字节
void MCP2515_WriteByte(unsigned char addr,unsigned char data)
{MC2515_CS(0);SPI_MCP2515_Write_Read(MCP2515_WRITE);SPI_MCP2515_Write_Read(addr);SPI_MCP2515_Write_Read(data);MC2515_CS(1);
}
//功能:只修改寄存器中的某些位
//入口参数:Addr:寄存器地址 MASK:屏蔽字 data:数据字节
void MCP2515_BitModify(unsigned char Addr, unsigned char MASK, unsigned char data)
{MC2515_CS(0);SPI_MCP2515_Write_Read(MCP2515_BIT_MODIFY);SPI_MCP2515_Write_Read(Addr);SPI_MCP2515_Write_Read(MASK);SPI_MCP2515_Write_Read(data);MC2515_CS(1);
}
//功能:获取读状态指令中的数据
//返回值:读状态指令中的数据
uint8_t MCP2515_Get_ReadStatus(void)
{unsigned char ReadData;MC2515_CS(0); ReadData=SPI_MCP2515_Write_Read(MCP2515_READ_RXTX_STATUS);MC2515_CS(1);return ReadData;
}
//功能:获取读状态指令中的数据
//返回值:读状态指令中的数据
uint8_t MCP2515_Get_RxStatus(void)
{unsigned char ReadData;MC2515_CS(0); ReadData=SPI_MCP2515_Write_Read(MCP2515_RX_STATUS);MC2515_CS(1);return ReadData;
}
//功能:请求发送功能
//入口参数:TxBn 发送缓冲器序号
//MCP2515_RTS_TXB0/MCP2515_RTS_TXB1/MCP2515_RTS_TXB2/MCP2515_RTS_ALL
void MCP2515_RTS(unsigned char TxBn)
{MC2515_CS(0); SPI_MCP2515_Write_Read(TxBn);MC2515_CS(1);
}
/*
bit 7-6 SJW:同步跳转宽度位 <1:0>11 = 长度 = 4 x TQ10 = 长度 = 3 x TQ01 = 长度 = 2 x TQ00 = 长度 = 1 x TQ
bit 5-0 BRP:波特率预分频比位 <5:0>TQ = 2 x (BRP + 1)/FOSC
*/
void MCP2515_SetCNF1(unsigned char data)
{MCP2515_WriteByte(MCP2515_CNF1,data);
}/*
bit 7 BTLMODE:相位缓冲段 PS2 位时间长度位1 = PS2 时间长度由 CNF3 的 PHSEG22:PHSEG20 位决定0 = PS2 时间长度为 PS1 和 IPT (2 TQ)两者的较大值
bit 6 SAM:采样点配置位1 = 在采样点对总线进行三次采样0 = 在采样点对总线进行一次采样
bit 5-3 PHSEG1:相位缓冲段 PS1 位时间长度位 <2:0>(PHSEG1 + 1) x TQ
bit 2-0 PRSEG:传播段长度位 <2:0>(PRSEG + 1) x TQ
*/
void MCP2515_SetCNF2(unsigned char data)
{MCP2515_WriteByte(MCP2515_CNF2,data);
}/*
bit 7 SOF:起始帧信号位如果 CANCTRL.CLKEN = 1:1 = CLKOUT 引脚使能为 SOF 信号0 = CLKOUT 引脚使能为时间输出功能如果 CANCTRL.CLKEN = 0,该位为任意状态 .
bit 6 WAKFIL:唤醒滤波使能位1 = 唤醒滤波器使能0 = 唤醒滤波器禁止
bit 2-0 PHSEG2:相位缓冲段 PS2 长度 <2:0>(PHSEG2 + 1) x TQ 注: PS2 的最小有效值为 2 TQ
*/
void MCP2515_SetCNF3(unsigned char data)
{MCP2515_WriteByte(MCP2515_CNF3,data);
}/*
bit 7-5 REQOP<2:0>:请求工作模式的位000 = 设定为正常工作模式001 = 设定为休眠模式010 = 设定为环回模式011 = 设定为仅监听模式100 = 设定为配置模式REQOP 位不应设置为其他值,因为这些值都是无效的。
注: 上电时, REQOP = b’111’
bit 4 ABAT:中止所有当前报文发送的位1 = 请求中止所有当前报文发送的缓冲器0 = 终止对所有报文发送中止的请求
bit 3 OSM:单触发模式位1 = 使能。报文仅尝试发送一次0 = 禁止。如有需要,报文会重新发送。
bit 2 CLKEN:CLKOUT 引脚使能位1 = CLKOUT 引脚使能0 = CLKOUT 引脚禁止 (引脚处于高阻态)
bit 1-0 CLKPRE<1:0>:CLKOUT 引脚预分频比位00 =FCLKOUT = 系统时钟频率 /101 =FCLKOUT = 系统时钟频率 /210 =FCLKOUT = 系统时钟频率 /411 =FCLKOUT = 系统时钟频率 /8
*/
void MCP2515_SetMode(unsigned char data)
{MCP2515_WriteByte(MCP2515_CANCTRL,data);
}/*
bit 7-5 OPMOD:工作模式位 <2:0>000 = 器件处于正常工作模式001 = 器件处于休眠模式010 = 器件处于环回模式011 = 器件处于仅监听模式100 = 器件处于配置模式
bit 4 未用:读为 0
bit 3-1 ICOD:中断标志代码位 <2:0>000 = 无中断001 = 出错中断010 = 唤醒中断011 = TXB0 中断100 = TXB1 中断101 = TXB2 中断110 = RXB0 中断111 = RXB1 中断bit 0 未用:读为 0
*/
unsigned char MCP2515_GetCanStatus(void)
{return MCP2515_ReadByte(MCP2515_CANSTAT);
}void MCP2515_SetTXID(unsigned char TxBnID,MCP2515_CanTxMsg *txmsg)
{unsigned char HSID,LSID,EID8,EID0;unsigned int SendId[2];if(txmsg->IDE==MCP2515_CAN_Standard){SendId[0]=txmsg->StdId;HSID=(unsigned char)(SendId[0]>>3);LSID=(unsigned char)((SendId[0]<<5)&0xE0); MCP2515_WriteByte(MCP2515_TXB0SIDH,HSID);MCP2515_WriteByte(MCP2515_TXB0SIDL,LSID); MCP2515_WriteByte(MCP2515_TXB0DLC,txmsg->DLC);}else if(txmsg->IDE==MCP2515_CAN_Extended){SendId[0]=(txmsg->ExtId)>>18;SendId[1]=(txmsg->ExtId)&0x03FFFF;HSID=(unsigned char)(SendId[0]>>3);LSID=((unsigned char)((SendId[0]<<5)&0xE0) | MCP2515_CAN_Extended | (unsigned char)((SendId[1]>>16)&0x03) );EID8=(unsigned char)(SendId[1]>>8);EID0=(unsigned char)SendId[1];
// printf("\r\nHSID=%x HSID=%x EID8=%x EID0=%x",HSID,LSID,EID8,EID0);MCP2515_WriteByte(MCP2515_TXB0SIDH,HSID);MCP2515_WriteByte(MCP2515_TXB0SIDL,LSID); MCP2515_WriteByte(MCP2515_TXB0EID8,EID8);MCP2515_WriteByte(MCP2515_TXB0EID0,EID0); }
}void MCP2515_SetTXDLC(unsigned char TxBnDLC,MCP2515_CanTxMsg *txmsg)
{if(txmsg->DLC>=8)txmsg->DLC=8;MCP2515_WriteByte(TxBnDLC,txmsg->DLC|0x40);//默认数据帧
}/*
TXBnDM7:TXBnDM0:发送缓冲器 n 数据字段字节 m
*/
void MCP2515_SetTXDATA(unsigned char TxBnDm,MCP2515_CanTxMsg *txmsg)
{for(unsigned char i=0;i<txmsg->DLC;i++){MCP2515_WriteByte(TxBnDm+i,txmsg->Data[i]);}
}相关文章:

stm32驱动MCP2515芯片,项目已通过测试
最近公司做一个项目,需要3路can通道,但是stm32看了很久,最多也就只有2个can,所以找到了一款MCP2515芯片,可以用spi驱动can。 已经实现了can的发送和接收,接收采用的是外部中断接收的方式。和单片机本身带的…...
Nginx部署前后端分离项目
dev.env.js解释 //此文件时开发环境配置文件 use strice//使用严格模式 const merge require(webpacl-merge)//合并对象 const prodEnv require(./prod.env)//导出 module.exports merge(prodEnv,{//合并两个配置文件对象并生成一个新的配置文件,如果合并的过程…...
pytorch多分类问题 CrossEntropyLoss()函数的输入size/shape不一致问题
在使用pytorch实现一个多分类任务的时候,许多多分类任务在训练过程中都会有如下的代码: criterion nn.CrossEntropyLoss() loss criterion(output, target) # output.size : [batch_size, class_num] # target.size : [batch_size]许多的初学者会卡在…...

硬盘或者U盘提示需要格式化的解决办法
插入硬盘之后提示: 使用驱动器 G:中的光盘之前需要将其格式化 是否要将其格式化? 如下图所示 顿时慌了啊,里面还有比较重要的东西呢,这一下子完蛋? 遇事找某宝,上面估计有这种技术服务。果然有这一类的技术服务&…...

Clip-Path
前言 借助clip-path,我们可以实现一些复杂的animation动画效果,我们先来简单概述一下它的特性,如MDN所描述的。 The clip-path CSS property creates a clipping region that sets what part of an element should be shown. Parts that are inside the region are shown, whi…...
Matlab绘图系列教程-Matlab 34 种绘图函数示例(下)
Matlab绘图系列教程:揭秘高质量科学图表的绘制与优化 文章目录 Matlab绘图系列教程:揭秘高质量科学图表的绘制与优化第一部分:入门指南1.1 简介关于本教程的目的与范围Matlab绘图在科学研究中的重要性 1.2 准备工作安装Matlab及其工具箱 1.3 …...

【Vue+Django】Training Management Platform Axios并发请求 - 20230703
需求陈述 由于API是特定单位/特定类别/特定教学方式的数据,故汇总数据需要循环请求不同单位/不同类别/不同教学方式。 技术要点 1.axios并发请求 2.JS for循环 3.Vue数组中出现 ob :Observer无法取值问题的解决方法 4.将数据转化为数组 5.一次请求所有数据后&…...
smart Spring:自定义注解、拦截器的使用(更新中...)
文章目录 〇、使用自定义注解的好处和工作原理一、如何使用自定义注解1.自定义一个注解2.在类、属性、方法上进行使用3.元注解 二、使用拦截器的好处和工作原理三、如何使用拦截器参考 本博客源码: 〇、使用自定义注解的好处和工作原理 自定义注解是Java语言提供的…...

php导出pdf
插件官网:TCPDF 博主用的是tp6框架 、tcpdf插件 composer require tecnickcom/tcpdf --ignore-platform-reqs 后面是忽略平台要求的参数 ---------------中文乱码start------------------ 关于中文乱码问题: 网上说的下载字体放入fonts 利用tools…...

【ECMAScript6_2】字符串
1、字符的Unicode表示法 ES6 加强了对 Unicode 的支持,允许采用\uxxxx形式表示一个字符,其中xxxx表示字符的 Unicode 码点。(\u0000-\uFFFF) 码点超过取值范围之后不能正确解读,但是只要给码点加上{}就可以正确解读。 …...
37.RocketMQ之Broker消息存储源码分析
highlight: arduino-light 消息存储文件 rocketMQ的消息持久化在我们在搭建集群时都特意指定的文件存储路径,进入指定的store目录下就可以看到。 下面介绍各文件含义 CommitLog 存储消息的元数据。produce发出的所有消息都会顺序存入到CommitLog文件当中。 CommitLog由多个文件…...
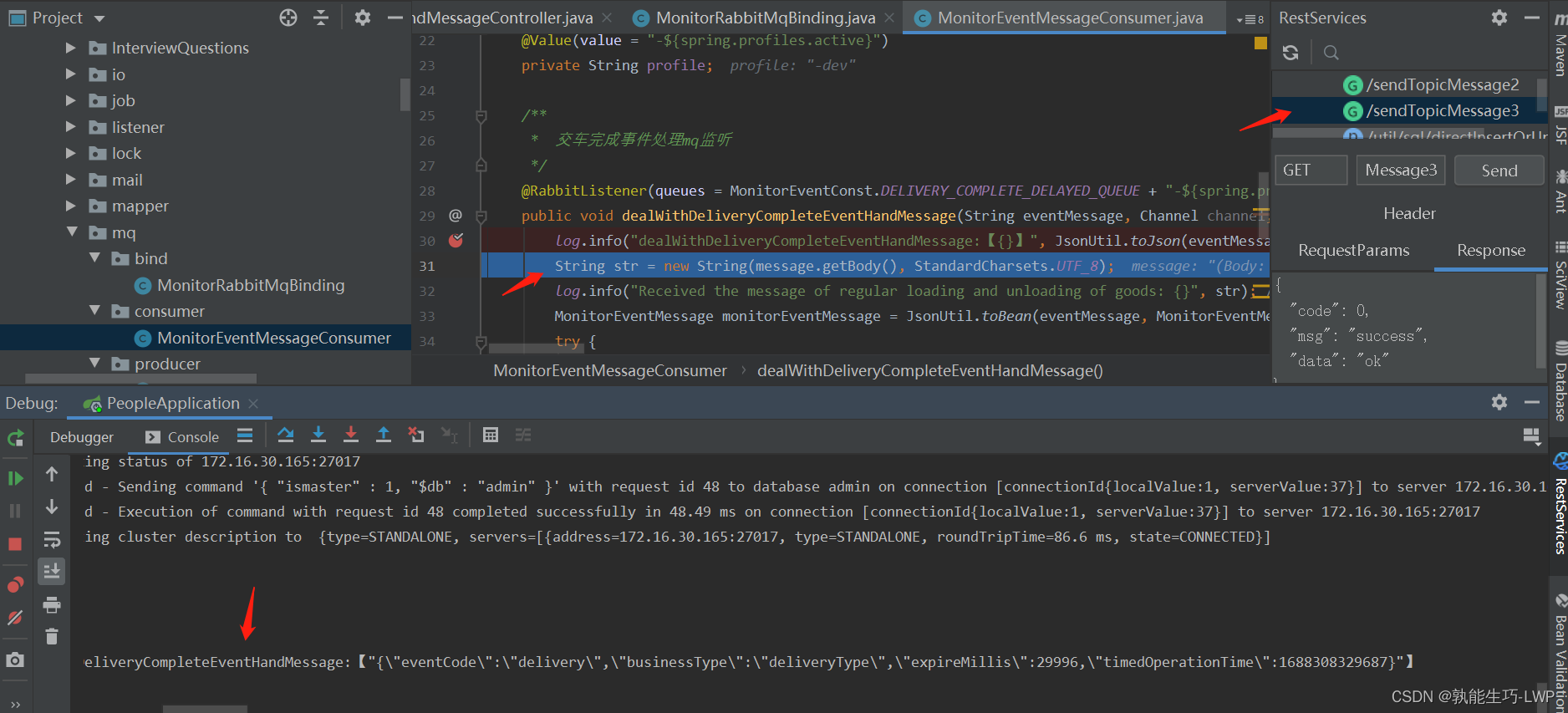
RabbitMq应用延时消息
一.建立绑定关系 package com.lx.mq.bind;import com.lx.constant.MonitorEventConst; import lombok.extern.slf4j.Slf4j; import org.springframework.amqp.core.*; import org.springframework.beans.factory.annotation.Value; import org.springframework.context.annota…...

【WEB自动化测试】- 浏览器操作方法
一、常用方法 1. maximize_window() 最大化窗口 (重点) 说明:如果能够在打开页面时,全屏显示页面,就能尽最大可能加载更多的页面,提高可定位性 2. set_window_size(width, height) 设置浏览器窗口的大小 (了解) 场景࿱…...

VSCode设置鼠标滚轮滑动设置字体大小
1:打开"文件->首选项->设置 2 :打开settings.json文件 英文版这里有个坑 一般点击我下图右上角那个{ } 就可以打开了 在 设置的json 文件中加入如下 “editor.mouseWheelZoom”: true { “editor.mouseWheelZoom”: true, “json.schemas”: [ ]}...
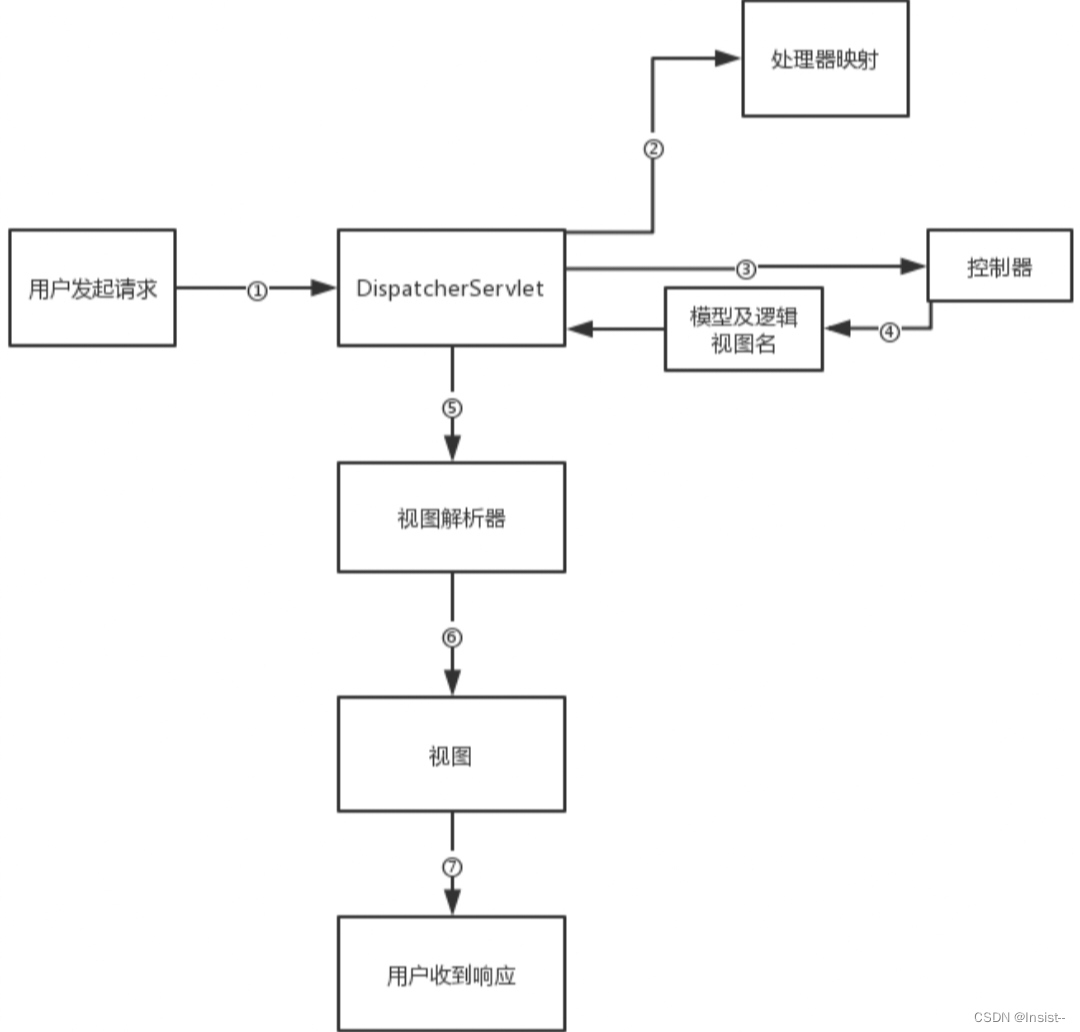
Spring MVC是什么?详解它的组件、请求流程及注解
作者:Insist-- 个人主页:insist--个人主页 作者会持续更新网络知识和python基础知识,期待你的关注 前言 本文将讲解Spring MVC是什么,它的优缺点与九大组件,以及它的请求流程与常用的注解。 目录 一、Spring MVC是什…...

基于Spring Boot的广告公司业务管理平台设计与实现(Java+spring boot+MySQL)
获取源码或者论文请私信博主 演示视频: 基于Spring Boot的广告公司业务管理平台设计与实现(Javaspring bootMySQL) 使用技术: 前端:html css javascript jQuery ajax thymeleaf 后端:Java springboot框架 …...

docker 基本命令安装流程
docker 基本命令安装流程 1.更新Ubuntu的apt源索引 $ sudo apt-get update2.安装包允许apt通过HTTPS使用仓库 $ sudo dpkg --configure -a $ sudo apt-get install apt-transport-https ca-certificates curl software-properties-common3.添加Docker官方GPG key $ curl -f…...
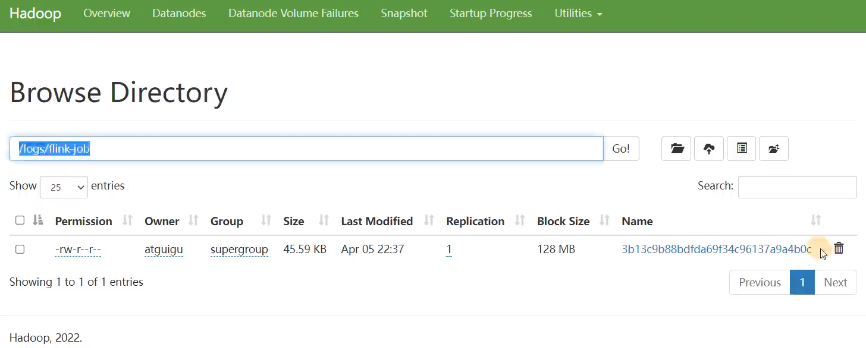
尚硅谷大数据Flink1.17实战教程-笔记02【Flink部署】
尚硅谷大数据技术-教程-学习路线-笔记汇总表【课程资料下载】视频地址:尚硅谷大数据Flink1.17实战教程从入门到精通_哔哩哔哩_bilibili 尚硅谷大数据Flink1.17实战教程-笔记01【Flink概述、Flink快速上手】尚硅谷大数据Flink1.17实战教程-笔记02【Flink部署】尚硅谷…...

【LeetCode每日一题合集】2023.7.3-2023.7.9
文章目录 2023.7.3——445. 两数相加 II(大数相加/高精度加法)2023.7.4——2679. 矩阵中的和2023.7.5——2600. K 件物品的最大和(贪心)代码1——贪心模拟代码2——Java一行 2023.7.6——2178. 拆分成最多数目的正偶数之和&#x…...

java企业工程项目管理系统平台源码
工程项目管理软件(工程项目管理系统)对建设工程项目管理组织建设、项目策划决策、规划设计、施工建设到竣工交付、总结评估、运维运营,全过程、全方位的对项目进行综合管理 工程项目各模块及其功能点清单 一、系统管理 1、数据字典&#…...

WAN2.2文生视频效果实测对比:不同SDXL风格对动态连贯性的影响分析
WAN2.2文生视频效果实测对比:不同SDXL风格对动态连贯性的影响分析 最近在玩WAN2.2文生视频模型时,我发现一个挺有意思的现象:虽然模型本身很强大,但生成的视频效果好不好,很大程度上取决于你选的“风格”。WAN2.2集成…...
)
别再纠结选哪个了!实测对比PP-OCRv4、v3、读光等主流开源OCR模型(附完整代码与数据集)
主流开源OCR模型实战评测:从技术指标到业务落地的全维度解析 每次打开GitHub搜索OCR项目时,总会被琳琅满目的模型搞得眼花缭乱——PP-OCR系列、读光、DBNet...每个项目主页都宣称自己"精度最高"、"速度最快"。但当你真正把这些模型部…...

Yi-Coder-1.5B代码生成实战:快速搭建本地AI编程助手
Yi-Coder-1.5B代码生成实战:快速搭建本地AI编程助手 1. 引言:你的私人编程助手,本地就能跑 还在为写重复的样板代码而烦恼吗?或者面对一个新框架的API文档,不知道从何下手?如果你是一名开发者,…...

终极指南:如何利用 babel-loader 与 @babel/preset-env 实现现代浏览器智能编译
终极指南:如何利用 babel-loader 与 babel/preset-env 实现现代浏览器智能编译 【免费下载链接】babel-loader 📦 Babel loader for webpack 项目地址: https://gitcode.com/gh_mirrors/ba/babel-loader 在现代前端开发中,JavaScript …...

基于Flowable全局监听器实现智能节点跳过:告别重复审批
1. 为什么需要智能跳过重复审批节点? 想象一下这样的场景:你设计了一个采购审批流程,部门经理需要先后审批"采购申请"和"采购确认"两个节点。但当这两个节点都分配给同一位经理时,他会在系统里看到两个完全相…...

[RAG在LangChain中的实现]常用的向量存储和基于向量存储的检索器
向量存储是RAG解决方案的核心,目前市面上由很多向量存储产品,由免费开源的,也有商业闭源的;有本地部署的,也有完全云托管的;有传统数据库产品推出的针对向量存储的扩展,也有新势力专门针对向量存…...

这个网站,我愿称之为生信云平台天花板
刚入门生信的你,是否也曾被这些问题折磨得想摔键盘?• Linux 环境配置:conda install 报错到怀疑人生,环境冲突让你原地崩溃。• 硬件瓶颈: 实验室服务器要排队,自己的轻薄本跑个比对就能当暖气片。• 代码…...

【Frida Android】实战篇:Frida-Trace 进阶追踪——JNI 函数调用栈与参数解析
1. 深入理解JNI函数调用栈追踪 第一次用Frida-Trace追踪JNI函数时,最让我困惑的就是如何看清整个调用链路。记得当时分析一个金融类APP,发现它调用了十几个so库,函数调用关系像蜘蛛网一样复杂。后来通过反复实践,终于摸索出一套完…...

黑客入侵终端设备的五种常见方式
黑客入侵终端设备的五种常见方式 网络安全重磅福利:入门&进阶全套282G学习资源包免费分享! 黑客的攻击方式并非都是复杂繁琐的。当黑客发起网络攻击时仅为了牟利而已,并不是都需要掌握高超的技术。他们的动机大体上可以分为两种ÿ…...
Unity3D物体缩放避坑指南:为什么你的Transform.localScale总是不生效?
Unity3D物体缩放避坑指南:为什么你的Transform.localScale总是不生效? 在Unity3D开发中,Transform.localScale属性看似简单,却隐藏着许多让开发者头疼的陷阱。不少开发者都遇到过这样的场景:明明代码里设置了localScal…...