开源点云数据集整理汇总
目录
- 一、ModelNet40
- 1. 网址
- 2. 模型
- 二、ShapeNet
- 1. 网址
- 2. 模型
- 三、S3DIS Dataset
- 1. 网址
- 2. 模型
- 四、ScanNet
- 1. 网址
- 2. 模型
- 五、RGB-D Object Dataset
- 1. 网址
- 2. 模型
- 六、 NYU Depth Dataset V2 (纽约大学深度数据集)
- 1. 网址
- 2. 模型
- 七、 The Stanford 3D Scanning Repository
- 1. 网址
- 2. 模型
- 八、悉尼城市目标数据集
- 1. 网址
- 2. 模型
- 九、ASL 数据集
- 1. 网址
- 2. 模型
- 十、大规模点云分类基准
- 1. 网址
- 2. 模型
- 十一、Oakland 3-D Point Cloud Dataset
- 1. 网址
- 2. 模型
- 十二、The KITTI Vision Benchmark Suite
- 1. 网址
- 2. 模型
- 十三、Robotic 3D Scan Repository
- 1. 网址
- 2. 模型
- 十四、WHU-TLS点云数据集
- 1. 网址
- 2. 模型
- 十五、Paris-rue-Madame数据集
- 1. 网址
- 2. 模型
- 十六、District of Columbia数据集
- 1. 网址
- 2. 模型
- 十七、Paris-Lille-3D数据集
- 1. 网址
- 2. 模型
- 十八、DublinCity数据集
- 1. 网址
- 2. 模型
- 十九、PCL官方测试数据集
- 1. 网址
- 2. 模型
- 二十、激光雷达数据源
- 1. Open Topography
- 2. USGS Earth Explorer
- 3. United States Interagency Elevation Inventory + Wikipedia LiDAR
- 4. NOAA Digital Coast
- 5. LIDAR Online
- 6. National Ecological Observatory Network
- 相关链接
一、ModelNet40
1. 网址
https://modelnet.cs.princeton.edu/#
2. 模型
没有颜色信息的飞机、杯子、椅子、吉他等40个模型。

二、ShapeNet
1. 网址
http://web.stanford.edu/~ericyi/project_page/part_annotation/index.html
2. 模型
没有颜色但有法向量且带有标注信息的飞机、杯子、帽子等16个类别的模型。


三、S3DIS Dataset
1. 网址
http://buildingparser.stanford.edu/dataset.html
2. 模型
室内分割数据集,模型为每个房间共计271个,房间内有13类物体。

四、ScanNet
1. 网址
http://www.scan-net.org/
2. 模型
1、 网格数据(.ply)
2、 RGB-D传感器留流数据(.sens)
3、 2D标注数据

五、RGB-D Object Dataset
1. 网址
http://rgbd-dataset.cs.washington.edu/
2. 模型
RGB-D对象数据集是一个包含300个常见家用对象的大型数据集。这些对象被组织成51个类别,使用WordNet上位词-下位词关系排列(类似于ImageNet)。该数据集是使用Kinect风格的3D相机记录的,该相机以30 Hz记录同步和对齐的640x480 RGB和深度图像。每个物体被放在一个转盘上,在一次完整的旋转中拍摄视频序列。对于每个物体,有3个视频序列,每个序列都是用安装在不同高度的摄像机记录的,以便从地平线的不同角度观察物体。

六、 NYU Depth Dataset V2 (纽约大学深度数据集)
1. 网址
https://cs.nyu.edu/~silberman/datasets/nyu_depth_v2.html
2. 模型

七、 The Stanford 3D Scanning Repository
1. 网址
http://graphics.stanford.edu/data/3Dscanrep/
2. 模型
包括:兔子、马、龙、菩萨等。

八、悉尼城市目标数据集
1. 网址
https://www.acfr.usyd.edu.au/papers/SydneyUrbanObjectsDataset.shtml
2. 模型
这个数据集包含用Velodyne HDL-64E LIDAR扫描的各种常见城市道路对象,收集于澳大利亚悉尼CBD。含有631个单独的扫描物体,包括车辆、行人、广告标志和树木等。可以用来测试匹配和分类算法。

九、ASL 数据集
1. 网址
https://projects.asl.ethz.ch/datasets/doku.php?id=home
2. 模型
这个数据集包含的数据比较多类,由Automonous Systems Lab提供的数据,一般数据集都有对应发表的论文成果。

十、大规模点云分类基准
1. 网址
http://www.semantic3d.net/
2. 模型
这个数据库是做大规模点云分类的,提供了一个大的自然场景标记的3D点云数据集,总计超过40亿点。涵盖了各种各样的城市场景:教堂、街道、铁路轨道、广场、村庄、足球场、城堡等等。

十一、Oakland 3-D Point Cloud Dataset
1. 网址
http://www.cs.cmu.edu/~vmr/datasets/oakland_3d/cvpr09/doc/
2. 模型
这个数据库的采集地点是在美国卡耐基梅隆大学周围,数据采集使用Navlab11,配备侧视SICK LMS激光扫描仪,用于推扫。其中包含了完整数据集、测试集、训练集和验证集。

十二、The KITTI Vision Benchmark Suite
1. 网址
https://www.cvlibs.net/datasets/kitti/
2. 模型
这个数据集来自德国卡尔斯鲁厄理工学院的一个项目,其中包含了利用KIT的无人车平台采集的大量城市环境的点云数据集(KITTI),这个数据集不仅有雷达、图像、GPS、INS的数据,而且有经过人工标记的分割跟踪结果,可以用来客观的评价大范围三维建模和精细分类的效果和性能。

十三、Robotic 3D Scan Repository
1. 网址
http://kos.informatik.uni-osnabrueck.de/3Dscans/
2. 模型
该存储库提供:
- 来自机器人实验的3D点云
- 机器人运行的日志文件
- 机器人社区的标准3D数据集

十四、WHU-TLS点云数据集
1. 网址
https://3s.whu.edu.cn/ybs/en/benchmark.htm
2. 模型
WHU-TLS基准数据集涵盖了地铁站、高铁站、山地、森林、公园、校园、住宅、河岸、文化遗产建筑、地下矿道、隧道等11种不同的环境,共包含115个测站、17.4亿个三维点以及点云之间的真实转换矩阵。

十五、Paris-rue-Madame数据集
1. 网址
https://people.cmm.minesparis.psl.eu/users/serna/rueMadameDataset.html
2. 模型
Paris-rue-Madame数据集包是由三维移动激光扫描仪收集得到。数据收集于法国巴黎第六区的一个街道rue Madame,试验区包含从rue Mézières至rue Vaugirard的160米长的街道;数据获取时间为2013年2于8日13:30。
这个数据集是在TerraMobilita项目的框架下开发的。它是由位于法国普里斯帕里斯蒂奇矿山的机器人实验室(CAOR)的LARA2-3D三维激光扫描仪获得的。数据标注是由法国枫丹白露矿业中心(MINES ParisTech)的数学形态学中心(CMM)以人工辅助的方式进行的。
数据集包含两个ply文件,每个ply文件包含有1000万个点。每个文件包含一个点列表(x, y, z, reflective, label, class),其中x, y, z对应于Lambert 93和altitude IGN1969(grid RAF09)参考坐标系中的地理参考坐标(E, N, U),reflective是激光强度,label是分割后获得的对象标签,class是对象类别。

十六、District of Columbia数据集
1. 网址
https://registry.opendata.aws/dc-lidar-2015/
2. 模型
该数据集由首席技术官办公室(OCTO)通过哥伦比亚特区地理信息系统计划管理,包含整个特区的平铺点云数据以及相关元数据。点云中的每个点都已根据以下模式进行了分类。
Class 1: Processed, but unclassified
Class 2: Bare earth
Class 7: Low noise
Class 9: Water
Class 10: Ignored ground
Class 11: Withheld
Class 17: Bridge decks
Class 18: High noise
十七、Paris-Lille-3D数据集
1. 网址
https://npm3d.fr/paris-lille-3d
2. 模型
Paris-Lille-3D是点云分类的数据集和基准。这些数据是由法国两个不同城市(巴黎和里尔)的移动激光系统(MLS)产生的。该点云已经完全由50个不同的类别手工标记,以帮助自动点云分割和分类算法的研究社区。

十八、DublinCity数据集
1. 网址
https://v-sense.scss.tcd.ie/DublinCity/
2. 模型
都柏林大学学院(UCD)的城市建模小组在2015年通过直升机执行的ALS设备扫描了都柏林市中心的主要区域(即大约 5.6 k m 2 5.6 km^2 5.6km2,包括部分覆盖区域)。然而,实际关注的区域大约是 2 k m 2 2 km^2 2km2,其中包含最密集的激光雷达点云和影像数据集。飞行高度大部分在300米左右,全程在41条跑道上进行。

十九、PCL官方测试数据集
1. 网址
https://github.com/PointCloudLibrary/data
2. 模型
包括二维、三维点云,配准、分割、滤波、建模等数据。

二十、激光雷达数据源
1. Open Topography
http://www.opentopography.org
2. USGS Earth Explorer
http://earthexplorer.usgs.gov
3. United States Interagency Elevation Inventory + Wikipedia LiDAR
https://en.wikipedia.org/wiki/National_Lidar_Dataset_(United_States)
4. NOAA Digital Coast
https://coast.noaa.gov/digitalcoast/tools/
5. LIDAR Online
https://www.lidar-online.com/
6. National Ecological Observatory Network
http://www.neonscience.org/data-resources
未完待续。。。
相关链接
[1] 三维点云数据集
[2] 点云数据集
[3] 三维点云开源数据集汇总
[4] 三维点云数据集—目标检测、分类、匹配
[5] 数据分享 | LiDAR点云数据汇总
相关文章:
开源点云数据集整理汇总
目录 一、ModelNet401. 网址2. 模型 二、ShapeNet1. 网址2. 模型 三、S3DIS Dataset1. 网址2. 模型 四、ScanNet1. 网址2. 模型 五、RGB-D Object Dataset1. 网址2. 模型 六、 NYU Depth Dataset V2 (纽约大学深度数据集)1. 网址2. 模型 七、 The Stanfo…...
【全栈开发指南】VUE前端路由设计及配置
我们在使用Vue.js时,创建单页面应用一定会用到路由,Vue Router 是 Vue.js 官方的路由管理器,我们在开发框架中过程中,需要结合Vue Router路由管理器提供的功能,设计和实现系统中菜单的配置。 一、实现原理 一级菜单r…...
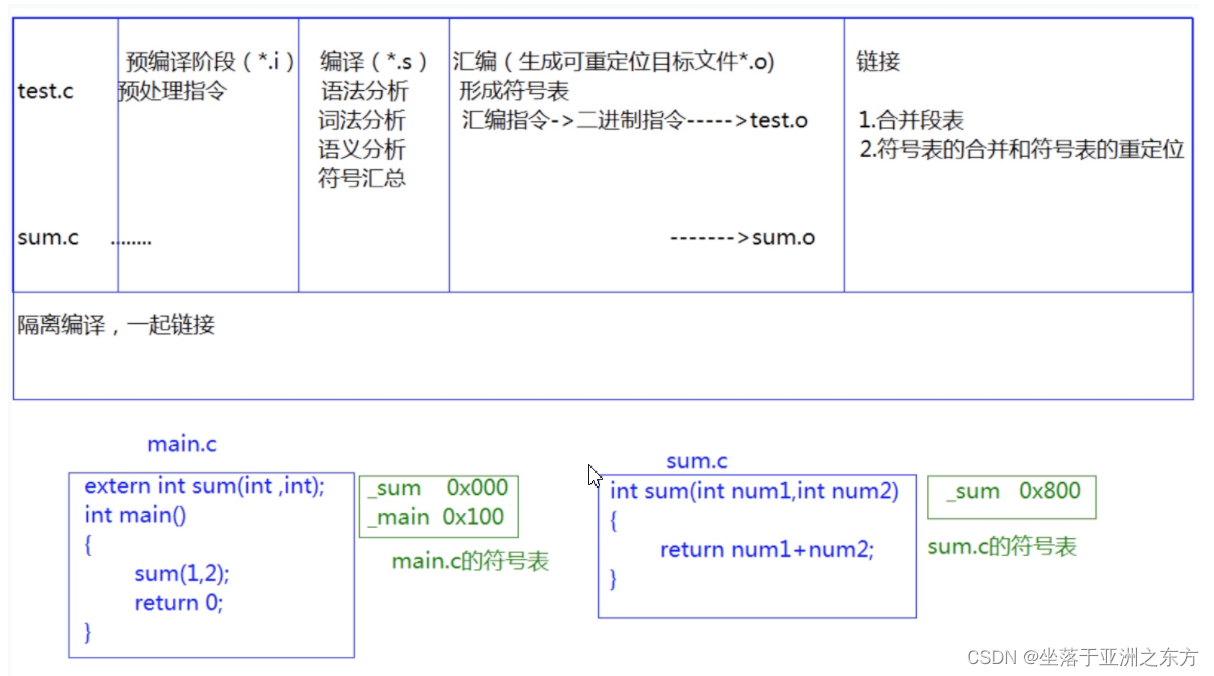
C语言程序环境和预处理
本章主要以图片和文字的形式给大家讲解 程序的翻译环境和程序的执行环境 在ANSI C的任何一种实现中,存在两个不同的环境。 第1种是翻译环境,在这个环境中源代码被转换为可执行的机器指令。 第2种是执行环境,它用于实际执行代码 2. 详解编译…...
为摸鱼助力:一份Vue3的生成式ElementPlus表单组件
目录 一、实现背景 二、简介 三、组织架构设计 四、实现方式 五、代码示例 六、示例代码效果预览 七、项目预览地址 & 项目源码地址 目前项目还有诸多待完善的地方,大家有好的想法、建议、意见等欢迎再次评论,或于github提交Issues 一、实现…...

数通工作中常见问题与解决方法
城域网,硬件,交换机开局 1、环路产生,现象,怎么解决 一般是物理拓扑存在环路,导致数据互传,Mac地址漂移,产生环路; Cpu利用率变高,端口流量接近100%,有mac…...
基于STM32+华为云IOT设计的智能浇花系统
一、前言 随着社会的不断发展和人们生活水平的逐渐提高,人们逐渐追求高质量的生活,很多人都会选择在家里或办公室种植一些花卉以净化家庭空气,陶冶情操,但是很多人忙于工作、学习、出差、旅游或者一些其他的原因,不能及时地对花卉进行照料,短时间内导致很多花卉因缺水分…...
是什么?)
回调函数(callback)是什么?
通俗易懂 你到一个商店买东西,刚好你要的东西没有货,于是你在店员那里留下了你的电话,过了几天店里有货了,店员就打了你的电话,然后你接到电话后就到店里去取了货。 在这个例子里,你的电话号码就叫回调函…...
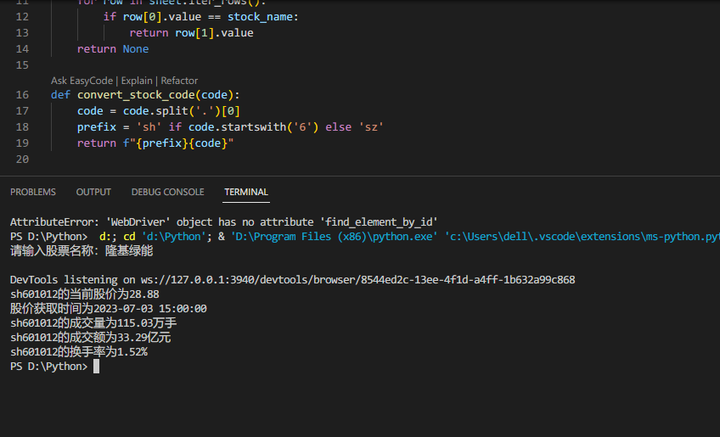
零代码量化投资:用ChatGPT获取新浪财经上的股票实时行情
现在很多免费的股票数据库,比如akshare,其实是从新浪财经或者东方财富网站上爬取下来的。如果能直接从新浪财经或者东方财富网站上爬取数据,可以获取更全面更即时的信息。 可以在ChatGPT中输入提示词如下: 写一段Python代码&…...

从GitLab拉取并运行项目
从GitLab拉取并运行项目 序Git项目运行运行报错 总结教训 序 搭建好前端基础环境后,开始尝试从单位项目组拉取项目尝试本地运行。 Git Git相关配置:一篇学会Git版本管理 先申请Git账号,随后由上级分配权限拉入该项目组。 通过git clone ……...

AI绘画结合GPT 把Ai绘画与摄影玩明白
一、绘画与摄影有什么关系? 绘画和摄影是两种不同的艺术形式,它们都以其自身独特的方式捕捉和表达现实。在某些方面,它们是相互联系的,而在其他方面,它们又有所不同。 相似之处:绘画和摄影都是创造性的…...

哈工大计算机网络课程数据链路层协议详解之:多路访问控制(MAC)协议
哈工大计算机网络课程数据链路层协议详解之:多路访问控制(MAC)协议 在上一小节介绍完数据链路层功能和所提供的服务后,接下来我们介绍一个在数据链路层非常重要的一个协议:多路访问控制MAC协议。 多路访问控制主要是…...

docker基本概念和相关命令
!!! 前面都是概念东西,可以直接跳到Docker命令就可以了(直接搜吧“Docker命令”,页内无法跳转,还在研究中……) 容器和虚拟化 容器包含应用和其所有的依赖包,但是与其他容器共享内核。容器在宿主机操作系统中,在用户…...
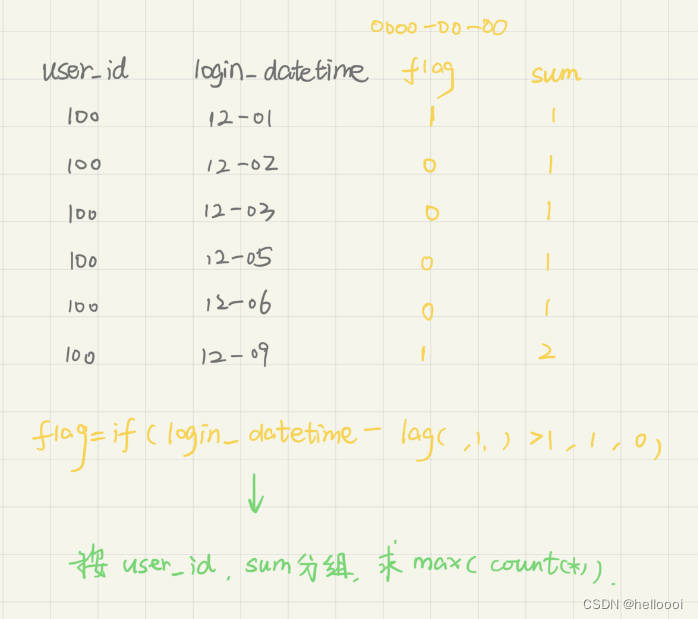
43. 间断连续登录用户问题
文章目录 题目需求思路一实现一题目来源 题目需求 现有各用户的登录记录表(login_events)如下,表中每行数据为:一个用户何时登录了平台。 现要求统计各用户最长的连续登录天数,间断一天也算作连续,例如&a…...
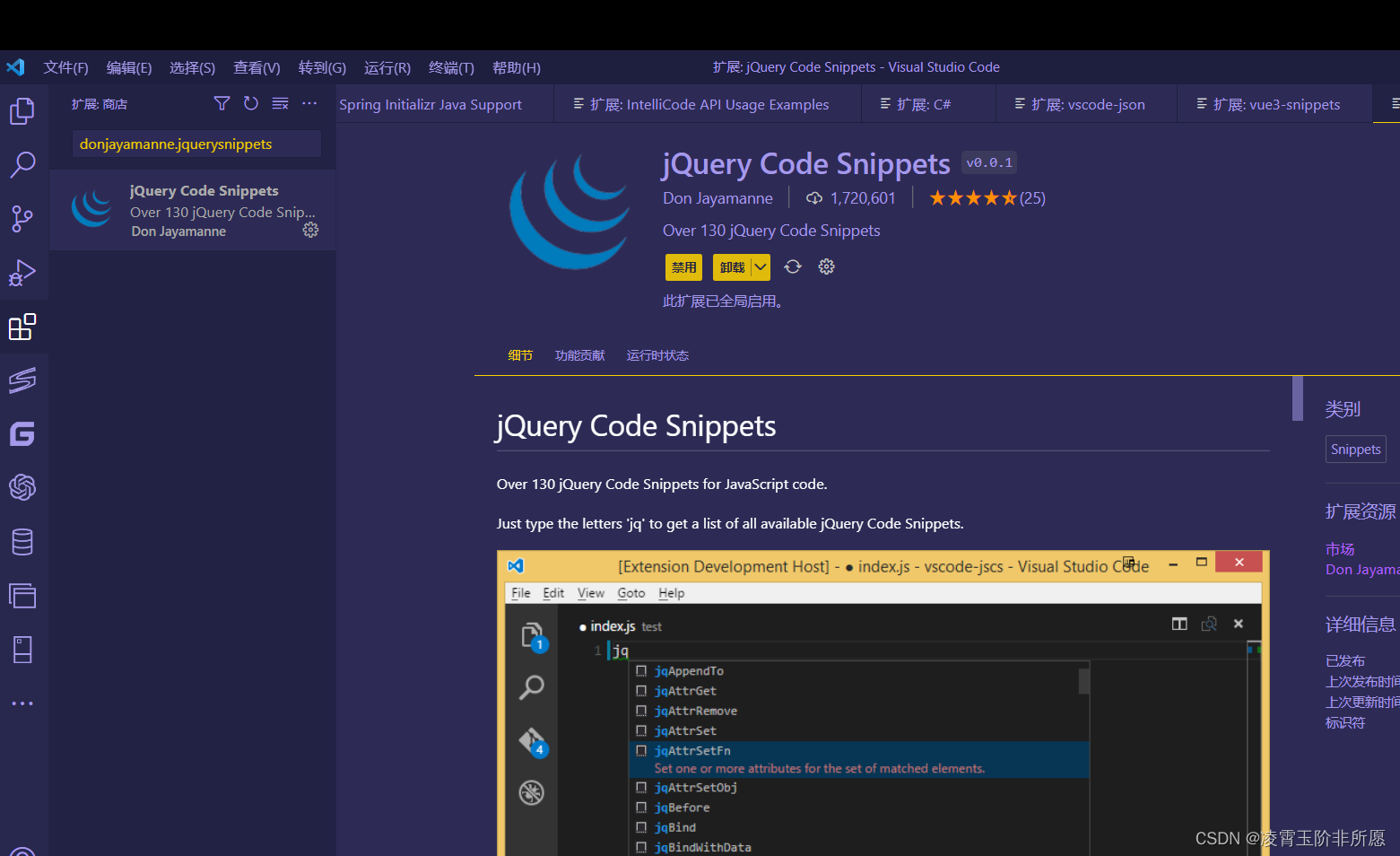
Visual Studio Code 编辑器实用插件简介
Visual Studio Code 编辑器插件 以下是一些常用的 Visual Studio Code 编辑器插件及其简短描述: 2gua.rainbow-brackets:在括号周围添加彩虹色的边框,以帮助区分不同层次的括号。adpyke.codesnap:将代码片段转换为漂亮的图片&am…...

微信小程序之Image那些事
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、使用场景二、使用方式1.动态读取image大小2.动态设置style3.动态赋值 总结 前言 小程序中 Image使用频率是非常高的 不同场景下 Image使用的属性也不一样 …...

【MySQL】不就是子查询
前言 今天我们来学习多表查询的下一个模块——子查询,子查询包括了标量子查询、列子查询、行子查询、表子查询,话不多说我们开始学习。 目录 前言 目录 一、子查询 1. 子查询的概念 2. 子查询语法格式 2.1 根据子查询结果不同可以分为:…...
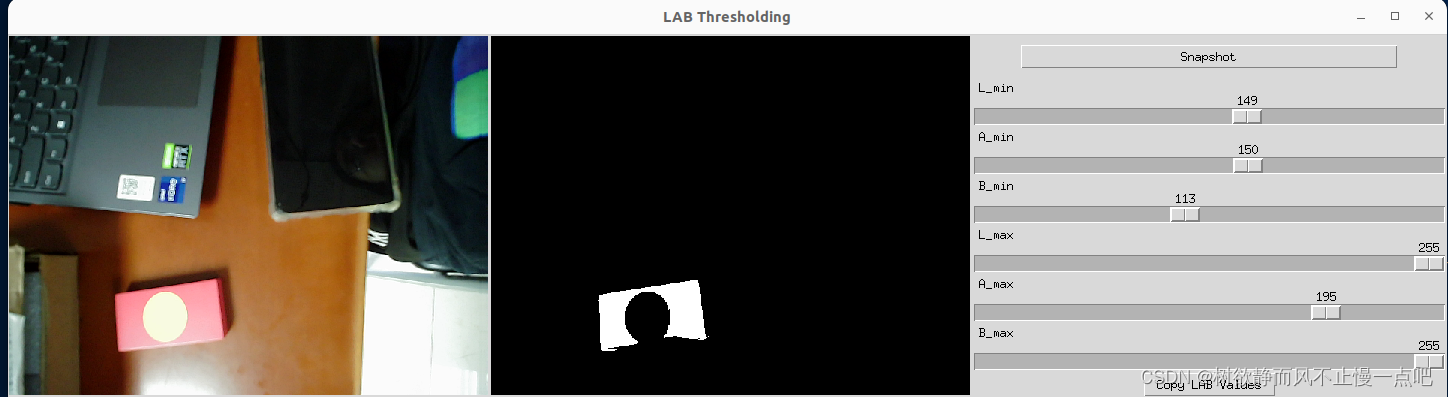
gpt4实现对摄像头帧缓冲区图像的LAB阈值选择界面(python-opencv)
代码全是GPT4写的,我就提出Prompt和要改的地方而已。 图形界面效果 可复制阈值:(xxx, xxx, xxx, xxx, xxx, xxx) 代码 import cv2 import numpy as np import time from tkinter import * from PIL import Image, ImageTk import pyperclip # new# G…...

Stable Diffusion WebUI 集成 LoRA模型,给自己做一张壁纸 Ubuntu22.04 rtx2060 6G
LoRA概念 LoRA的全称是LoRA: Low-Rank Adaptation of Large Language Models,可以理解为stable diffusion(SD)模型的一种插件,和hyper-network,controlNet一样,都是在不修改SD模型的前提下,利用少量数据训…...
Flink 读写Kafka总结
前言 总结Flink读写Kafka Flink 版本 1.15.4 Table API 本文主要总结Table API的使用(SQL),官方文档:https://nightlies.apache.org/flink/flink-docs-release-1.17/zh/docs/connectors/table/kafka/ kerberos认证相关配置 …...
LiDAR SLAM 闭环——BoW3D论文详解
标题:BoW3D: Bag of Words for Real-Time Loop Closing in 3D LiDAR SLAM 作者:Yunge Cui,Xieyuanli Chen,Yinlong Zhang,Jiahua Dong,Qingxiao Wu,Feng Zhu 机构:中科院沈阳自动化研究所 来源:2022 RAL 现算法已经开源&#…...

清单来了:2026年公认好用的专业AI论文网站
2026年AI论文写作工具已从“内容生成”进化为多维度学术支持系统,核心差异体现在文献真实性、格式合规性、长文本逻辑、查重降重、AIGC合规五大维度。本次测评覆盖6款主流工具,涵盖中文/英文、全流程/专项、免费/付费场景,让你高效筛选适合自…...

突破网盘下载限制:直链解析工具的技术实现与应用指南
突破网盘下载限制:直链解析工具的技术实现与应用指南 【免费下载链接】Online-disk-direct-link-download-assistant 可以获取网盘文件真实下载地址。基于【网盘直链下载助手】修改(改自6.1.4版本) ,自用,去推广&#…...

2026年程序员必看:AI Agent全面爆发,国产算力突围,这波技术红利别错过
🔥个人主页:北极的代码(欢迎来访) 🎬作者简介:java后端学习者 ❄️个人专栏:苍穹外卖日记,SSM框架深入,JavaWeb ✨命运的结局尽可永在,不屈的挑战却不可须臾或…...

三步掌握HiGHS线性优化求解器:从入门到实战
三步掌握HiGHS线性优化求解器:从入门到实战 【免费下载链接】HiGHS Linear optimization software 项目地址: https://gitcode.com/GitHub_Trending/hi/HiGHS 在数据分析与决策优化领域,如何高效解决资源分配、生产计划等线性规划问题一直是核心挑…...
)
嵌入式Linux开发板CH340驱动安装避坑指南(附详细步骤图)
嵌入式Linux开发板CH340驱动安装全流程解析与疑难排错 第一次接触嵌入式Linux开发板时,最让人头疼的往往不是代码编写,而是最基础的开发环境搭建。作为连接电脑与开发板的重要桥梁,CH340串口驱动的安装质量直接决定了后续调试效率。许多初学者…...

解决企业知识孤岛挑战:Outline多平台文档迁移架构与技术实现方案
解决企业知识孤岛挑战:Outline多平台文档迁移架构与技术实现方案 【免费下载链接】outline Outline 是一个基于 React 和 Node.js 打造的快速、协作式团队知识库。它可以让团队方便地存储和管理知识信息。你可以直接使用其托管版本,也可以自己运行或参与…...

LiuJuan20260223Zimage与Typora协作:智能化Markdown文档创作
LiuJuan20260223Zimage与Typora协作:智能化Markdown文档创作 每次打开Typora,看着那个简洁到极致的界面,我都会有种创作的冲动。但冲动归冲动,真到了要写一篇技术博客、整理一份项目文档,或者梳理一堆零散笔记的时候&…...
)
Copilot 命令行使用方式介绍(npm)
1. 什么是 Apache SeaTunnel? Apache SeaTunnel 是一个非常易于使用、高性能、支持实时流式和离线批处理的海量数据集成平台。它的目标是解决常见的数据集成问题,如数据源多样性、同步场景复杂性以及资源消耗高的问题。 核心特性 丰富的数据源支持&#…...

别只把Text2SQL当玩具:结合Spring AI与DeepSeek,我们这样用它优化了内部报表系统
别只把Text2SQL当玩具:结合Spring AI与DeepSeek,我们这样用它优化了内部报表系统 当业务团队每天提出十几个动态报表需求时,传统开发模式就像用勺子舀干涸的井水——我们团队曾连续三个月被SQL编写和接口开发压得喘不过气。直到将Text2SQL技术…...
)
出差党/远程办公必备:用OpenWrt软路由打造你的随身‘家庭办公室’(支持Windows远程唤醒与桌面)
移动办公革命:OpenWrt软路由构建高效远程办公系统 1. 现代远程办公的痛点与解决方案 作为一名常年奔波于各大城市的咨询顾问,我深刻理解移动办公的痛点:酒店网络不稳定、公共WiFi安全隐患、重要文件无法随时调取、高性能工作站闲置在家...直到…...