Pytorch迁移学习使用Resnet50进行模型训练预测猫狗二分类
目录
1.ResNet残差网络
1.1 ResNet定义
1.2 ResNet 几种网络配置
1.3 ResNet50网络结构
1.3.1 前几层卷积和池化
1.3.2 残差块:构建深度残差网络
1.3.3 ResNet主体:堆叠多个残差块
1.4 迁移学习猫狗二分类实战
1.4.1 迁移学习
1.4.2 模型训练
1.4.3 模型预测
1.ResNet残差网络
1.1 ResNet定义
深度学习在图像分类、目标检测、语音识别等领域取得了重大突破,但是随着网络层数的增加,梯度消失和梯度爆炸问题逐渐凸显。随着层数的增加,梯度信息在反向传播过程中逐渐变小,导致网络难以收敛。同时,梯度爆炸问题也会导致网络的参数更新过大,无法正常收敛。
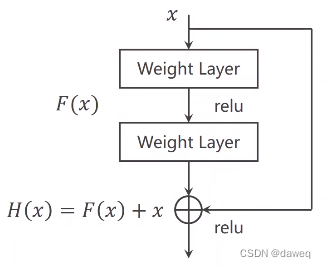
为了解决这些问题,ResNet提出了一个创新的思路:引入残差块(Residual Block)。残差块的设计允许网络学习残差映射,从而减轻了梯度消失问题,使得网络更容易训练。
下图是一个基本残差块。它的操作是把某层输入跳跃连接到下一层乃至更深层的激活层之前,同本层输出一起经过激活函数输出。
1.2 ResNet 几种网络配置
如下图:

1.3 ResNet50网络结构
ResNet-50是一个具有50个卷积层的深度残差网络。它的网络结构非常复杂,但我们可以将其分为以下几个模块:
1.3.1 前几层卷积和池化
import torch
import torch.nn as nnclass ResNet50(nn.Module):def __init__(self, num_classes=1000):super(ResNet50, self).__init__()self.conv1 = nn.Conv2d(in_channels=3, out_channels=64, kernel_size=7, stride=2, padding=3, bias=False)self.bn1 = nn.BatchNorm2d(64)self.relu = nn.ReLU(inplace=True)self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
1.3.2 残差块:构建深度残差网络
class ResidualBlock(nn.Module):def __init__(self, in_channels, out_channels, stride=1, downsample=None):super(ResidualBlock, self).__init__()self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride, bias=False)self.bn1 = nn.BatchNorm2d(out_channels)self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1, bias=False)self.bn2 = nn.BatchNorm2d(out_channels)self.conv3 = nn.Conv2d(out_channels, out_channels * 4, kernel_size=1, stride=1, bias=False)self.bn3 = nn.BatchNorm2d(out_channels * 4)self.relu = nn.ReLU(inplace=True)self.downsample = downsampledef forward(self, x):identity = xout = self.conv1(x)out = self.bn1(out)out = self.relu(out)out = self.conv2(out)out = self.bn2(out)out = self.relu(out)out = self.conv3(out)out = self.bn3(out)if self.downsample is not None:identity = self.downsample(x)out += identityout = self.relu(out)return out
1.3.3 ResNet主体:堆叠多个残差块
在ResNet-50中,我们堆叠了多个残差块来构建整个网络。每个残差块会将输入的特征图进行处理,并输出更加丰富的特征图。堆叠多个残差块允许网络在深度方向上进行信息的层层提取,从而获得更高级的语义信息。代码如下:
class ResNet50(nn.Module):def __init__(self, num_classes=1000):# ... 前几层代码 ...# 4个残差块的block1self.layer1 = self._make_layer(ResidualBlock, 64, 3, stride=1)# 4个残差块的block2self.layer2 = self._make_layer(ResidualBlock, 128, 4, stride=2)# 4个残差块的block3self.layer3 = self._make_layer(ResidualBlock, 256, 6, stride=2)# 4个残差块的block4self.layer4 = self._make_layer(ResidualBlock, 512, 3, stride=2)
利用make_layer函数实现对基本残差块Bottleneck的堆叠。代码如下:
def _make_layer(self, block, channel, block_num, stride=1):"""block: 堆叠的基本模块channel: 每个stage中堆叠模块的第一个卷积的卷积核个数,对resnet50分别是:64,128,256,512block_num: 当期stage堆叠block个数stride: 默认卷积步长"""downsample = None # 用于控制shorcut路的if stride != 1 or self.in_channel != channel*block.expansion: # 对resnet50:conv2中特征图尺寸H,W不需要下采样/2,但是通道数x4,因此shortcut通道数也需要x4。对其余conv3,4,5,既要特征图尺寸H,W/2,又要shortcut维度x4downsample = nn.Sequential(nn.Conv2d(in_channels=self.in_channel, out_channels=channel*block.expansion, kernel_size=1, stride=stride, bias=False), # out_channels决定输出通道数x4,stride决定特征图尺寸H,W/2nn.BatchNorm2d(num_features=channel*block.expansion))layers = [] # 每一个convi_x的结构保存在一个layers列表中,i={2,3,4,5}layers.append(block(in_channel=self.in_channel, out_channel=channel, downsample=downsample, stride=stride)) # 定义convi_x中的第一个残差块,只有第一个需要设置downsample和strideself.in_channel = channel*block.expansion # 在下一次调用_make_layer函数的时候,self.in_channel已经x4for _ in range(1, block_num): # 通过循环堆叠其余残差块(堆叠了剩余的block_num-1个)layers.append(block(in_channel=self.in_channel, out_channel=channel))return nn.Sequential(*layers) # '*'的作用是将list转换为非关键字参数传入
1.4 迁移学习猫狗二分类实战
1.4.1 迁移学习
迁移学习(Transfer Learning)是一种机器学习和深度学习技术,它允许我们将一个任务学到的知识或特征迁移到另一个相关的任务中,从而加速模型的训练和提高性能。在迁移学习中,我们通常利用已经在大规模数据集上预训练好的模型(称为源任务模型),将其权重用于新的任务(称为目标任务),而不是从头开始训练一个全新的模型。
迁移学习的核心思想是:在解决一个新任务之前,我们可以先从已经学习过的任务中获取一些通用的特征或知识,并将这些特征或知识迁移到新任务中。这样做的好处在于,源任务模型已经在大规模数据集上进行了充分训练,学到了很多通用的特征,例如边缘检测、纹理等,这些特征对于许多任务都是有用的。
1.4.2 模型训练
首先,我们需要准备用于猫狗二分类的数据集。数据集可以从Kaggle上下载,其中包含了大量的猫和狗的图片。
在下载数据集后,我们需要将数据集划分为训练集和测试集。训练集文件夹命名为train,其中建立两个文件夹分别为cat和dog,每个文件夹里存放相应类别的图片。测试集命名为test,同理。然后我们使用ResNet50网络模型,在我们的计算机上使用GPU进行训练并保存我们的模型,训练完成后在测试集上验证模型预测的正确率。
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision.transforms as transforms
from torch.utils.data import DataLoader, Dataset
from torchvision.datasets import ImageFolder
from torchvision.models import resnet50# 设置随机种子
torch.manual_seed(42)# 定义超参数
batch_size = 32
learning_rate = 0.001
num_epochs = 10# 定义数据转换
transform = transforms.Compose([transforms.Resize((224, 224)),transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))
])# 加载数据集
train_dataset = ImageFolder("train", transform=transform)
test_dataset = ImageFolder("test", transform=transform)train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=batch_size)# 加载预训练的ResNet-50模型
model = resnet50(pretrained=True)
num_ftrs = model.fc.in_features
model.fc = nn.Linear(num_ftrs, 2) # 替换最后一层全连接层,以适应二分类问题device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model.to(device)# 定义损失函数和优化器
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(model.parameters(), lr=learning_rate, momentum=0.9)# 训练模型
total_step = len(train_loader)
for epoch in range(num_epochs):for i, (images, labels) in enumerate(train_loader):images = images.to(device)labels = labels.to(device)# 前向传播outputs = model(images)loss = criterion(outputs, labels)# 反向传播和优化optimizer.zero_grad()loss.backward()optimizer.step()if (i + 1) % 100 == 0:print(f"Epoch [{epoch+1}/{num_epochs}], Step [{i+1}/{total_step}], Loss: {loss.item()}")
torch.save(model,'model/c.pth')
# 测试模型
model.eval()
with torch.no_grad():correct = 0total = 0for images, labels in test_loader:images = images.to(device)labels = labels.to(device)outputs = model(images)print(outputs)_, predicted = torch.max(outputs.data, 1)total += labels.size(0)correct += (predicted == labels).sum().item()breakprint(f"Accuracy on test images: {(correct / total) * 100}%")
1.4.3 模型预测
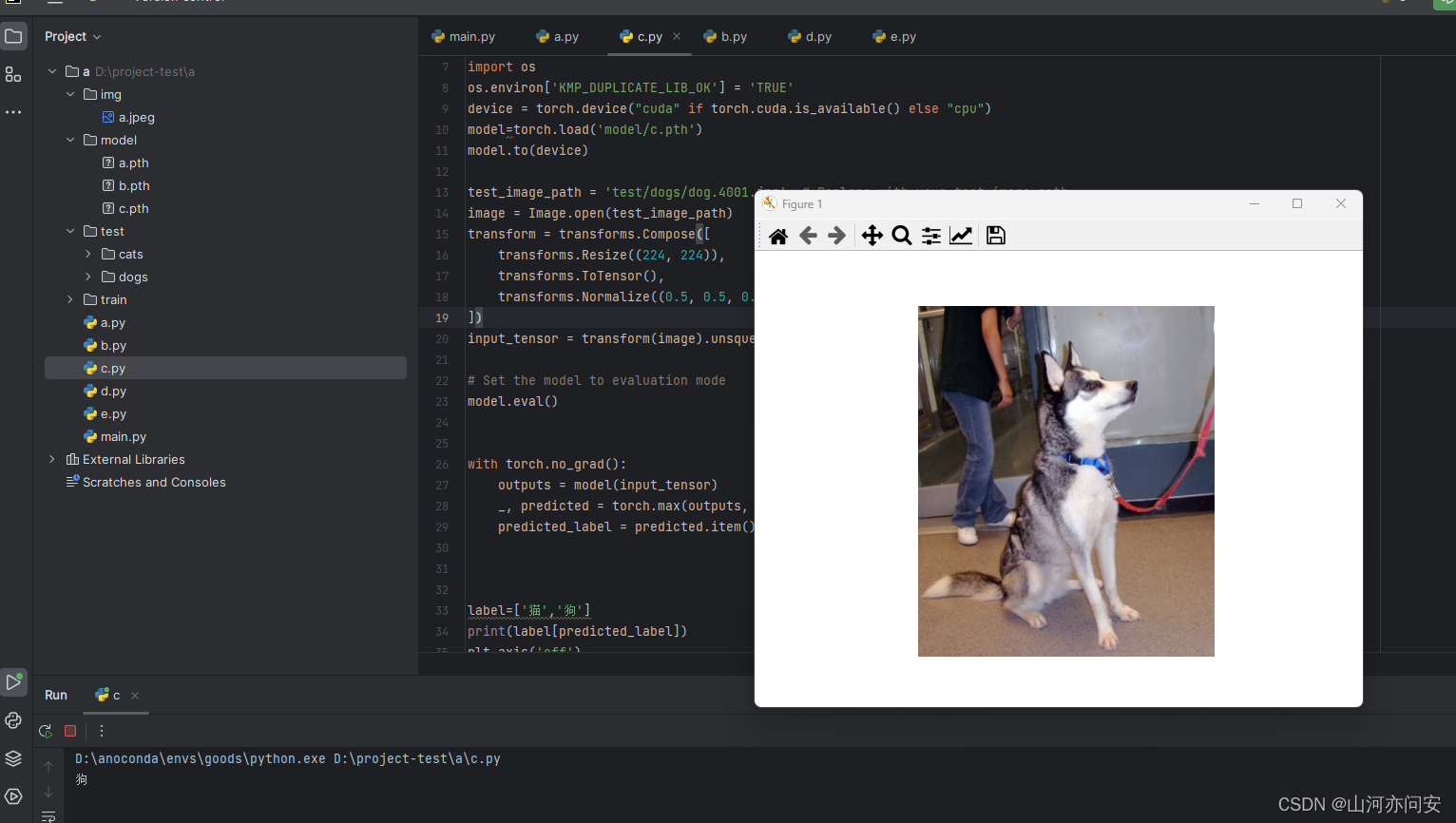
首先加载我们保存的模型,这里我们进行单张图片的预测,并把预测结果打印日志。
import cv2 as cv
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import torchvision.transforms as transforms
import torch
from PIL import Image
import os
os.environ['KMP_DUPLICATE_LIB_OK'] = 'TRUE'
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model=torch.load('model/c.pth')
print(model)
model.to(device)test_image_path = 'test/dogs/dog.4001.jpg' # Replace with your test image path
image = Image.open(test_image_path)
transform = transforms.Compose([transforms.Resize((224, 224)),transforms.ToTensor(),transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))
])
input_tensor = transform(image).unsqueeze(0).to(device) # Add a batch dimension and move to GPU# Set the model to evaluation mode
model.eval()with torch.no_grad():outputs = model(input_tensor)_, predicted = torch.max(outputs, 1)predicted_label = predicted.item()label=['猫','狗']
print(label[predicted_label])
plt.axis('off')
plt.imshow(image)
plt.show()
运行截图
至此这篇文章到此结束。
相关文章:
Pytorch迁移学习使用Resnet50进行模型训练预测猫狗二分类
目录 1.ResNet残差网络 1.1 ResNet定义 1.2 ResNet 几种网络配置 1.3 ResNet50网络结构 1.3.1 前几层卷积和池化 1.3.2 残差块:构建深度残差网络 1.3.3 ResNet主体:堆叠多个残差块 1.4 迁移学习猫狗二分类实战 1.4.1 迁移学习 1.4.2 模型训练 1.…...

HTML与XHTML的不同和各自特点
HTML和XHTML都是用于创建Web页面的标记语言。HTML是一种被广泛使用的标记语言,而XHTML是HTML的严格规范化版本。在本文中,我们将探讨HTML与XHTML之间的不同之处,以及它们各自的特点。 HTML与XHTML的不同之处 HTML和XHTML之间最大的不同在于它…...

微服务如何治理
微服务远程调用可能有如下问题: 注册中心宕机; 服务提供者B有节点宕机; 服务消费者A和注册中心之间的网络不通; 服务提供者B和注册中心之间的网络不通; 服务消费者A和服务提供者B之间的网络不通; 服务提供者…...
一本通1919:【02NOIP普及组】选数
这道题感觉很好玩。 正文: 先放题目: 信息学奥赛一本通(C版)在线评测系统 (ssoier.cn)http://ybt.ssoier.cn:8088/problem_show.php?pid1919 描述 已知 n 个整数 x1,x2,…,xn,以及一个整数 k(k&#…...

Kubernetes 集群管理和编排
文章目录 总纲第一章:引入 Kubernetes什么是容器编排和管理?容器编排和管理的重要性Kubernetes作为容器编排和管理解决方案 Kubernetes 的背景和发展起源和发展历程Kubernetes 项目的目标和动机 Kubernetes 的作用和优势作用优势 Kubernetes 的特点和核心…...

DDS协议--[第六章][Discovery]
DDS协议–Discovery 文章目录 DDS协议--Discovery侦听通告DDS提供发现协议参与者发现阶段(PDP)端点发现阶段(EDP)Fast DDS提供如下四种发现机制:简单发现机制简单发现机制步骤:侦听 侦听定位器用于接收DomainParticipant上的传入流量,是DDS发现机制和数据传输机制的关键…...

如何设置iptables,让网络流量转发给内部容器mysql
1.创建一个mysql ,无法外部访问 docker run -d --name mysql_container -e MYSQL_ROOT_PASSWORDliuyunshengsir -v /path/to/mysql_data:/var/lib/mysql mysql2.设置规则外部直接可访问 要使用 iptables 将网络流量转发给内部容器中的 MySQL 服务,你可…...
数字IC实践项目(7)—CNN加速器的设计和实现(付费项目)
数字IC实践项目(7)—基于Verilog的CNN加速器(付费项目) 写在前面的话项目整体框图神经网络框图完整电路框图 项目简介和学习目的软件环境要求 资源占用&板载功耗总结 写在前面的话 项目介绍: 卷积神经网络硬件加速…...

基于深度学习的高精度80类动物目标检测系统(PyTorch+Pyside6+YOLOv5模型)
摘要:基于深度学习的高精度80类动物目标检测识别系统可用于日常生活中或野外来检测与定位80类动物目标,利用深度学习算法可实现图片、视频、摄像头等方式的80类动物目标检测识别,另外支持结果可视化与图片或视频检测结果的导出。本系统采用YO…...

海康摄像头开发笔记(一):连接防爆摄像头、配置摄像头网段、设置rtsp码流、播放rtsp流、获取rtsp流、调优rtsp流播放延迟以及录像存储
文为原创文章,转载请注明原文出处 本文章博客地址:https://hpzwl.blog.csdn.net/article/details/131679108 红胖子(红模仿)的博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV、OpenGL、ffmpeg、OSG、单片机、软硬结…...

【NCNN】NCNN中Mat与CV中Mat的使用区别及相互转换方法
目录 相同点与不同点cv::Mat转ncnn::Matcv::Mat CV_8UC3 -> ncnn::Mat 3 channel swap RGB/BGRcv::Mat CV_8UC3 -> ncnn::Mat 1 channel do RGB2GRAY/BGR2GRAYcv::Mat CV_8UC1 -> ncnn::Mat 1 channel ncnn::Mat转cv::Mancnn::Mat 3 channel -> cv::Mat CV_8UC3 …...

Android 13 设置自动进入wifi adb模式
Android 13 设置自动进入wifi adb模式 文章目录 Android 13 设置自动进入wifi adb模式一、前言:二、解决Android 13 wifi adb每次重启自动重置问题方法1、分析系统中每次重置wifi adb属性的代码2、在开机广播里面进行设置wifi adb 相关属性(1)…...
插入排序)
(笔记)插入排序
插入排序 插入排序是一种简单且常见的排序算法,它通过重复将一个元素插入到已经排好序的一组元素中,来达到排序的目的。在插入排序算法中,将待排序序列分为已排序和未排序两个部分。初始时,已排序部分只包含一个记录,…...
结构型模式 - 组合模式
概述 对于这个图片肯定会非常熟悉,上图我们可以看做是一个文件系统,对于这样的结构我们称之为树形结构。在树形结构中可以通过调用某个方法来遍历整个树,当我们找到某个叶子节点后,就可以对叶子节点进行相关的操作。可以将这颗树理…...

EDM营销过时了?不,这才是跨境电商成功的最佳工具
根据最近的一项研究,电子邮件仍然是最具说服力的营销工具和沟通形式之一。虽然即时通讯等其他渠道正在扎根,但电子邮件仍然是影响最深远的商业交流形式。到2023年,每天发送和接收的电子邮件总数可能会超过333亿封。所以,如果您希望…...

【大数据之Hive】二十五、HQL语法优化之小文件合并
1 优化说明 小文件优化可以从两个方面解决,在Map端输入的小文件合并,在Reduce端输出的小文件合并。 1.1 Map端输入文件合并 合并Map端输入的小文件是指将多个小文件分到同一个切片中,由一个Map Task处理,防止单个小文件启动一个M…...

spring 连接oracle数据库报错{dataSource-1} init error解决,电脑用户名问题
错误描述: 连接oracle数据就报错,同样的代码其他电脑不会报错。 报错如下: {dataSource-1} init error java.sql.SQLRecoverableException: IO 错误: Undefined Error com.alibaba.druid.pool.DruidDataSource-1049[main]ERROR: {dataSourc…...

行业视野::人工智能与机器人
控制和机器人领域非常重要的quote:莫拉维克悖论(Moravecs paradox) It is comparatively easy to make computers exhibit adult level performance on intelligence tests or playing checkers,and difficult or impossible to give them th…...

【Python入门系列】第十七篇:Python大数据处理和分析
【Python入门系列】第十七篇:Python大数据处理和分析 文章目录 前言一、数据处理和分析步骤二、Python大数据处理和分析库三、Python大数据处理和分析应用1、数据清洗和转换2、数据分析和统计3、数据可视化4、机器学习模型训练和预测5、大规模数据处理和分布式计算6…...
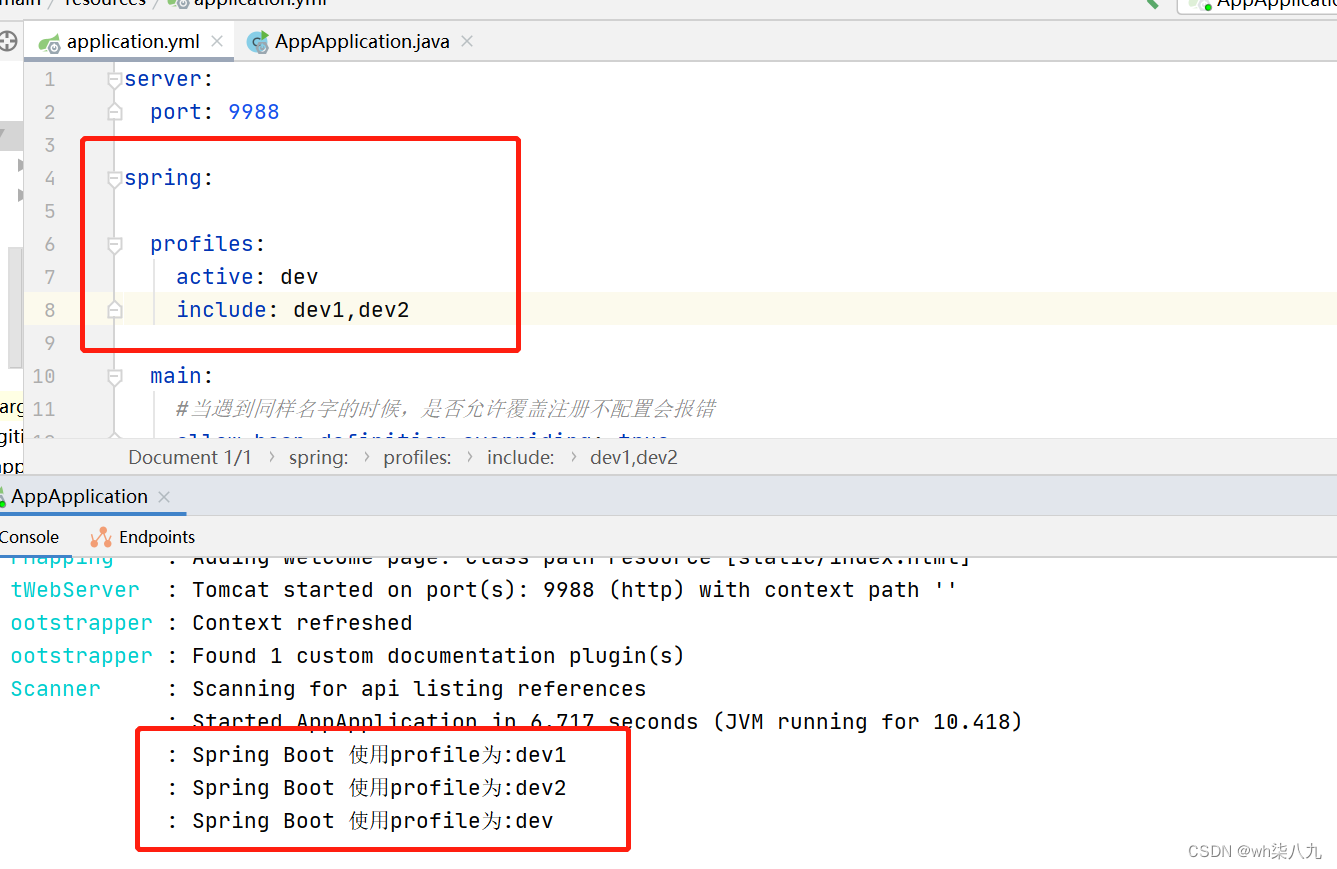
spring.profiles的使用详解
本文来说下spring.profiles.active和spring.profiles.include的使用与区别 文章目录 业务场景spring.profiles.active属性启动时指定 spring.profiles.include属性配置方法配置位置配置区别 用示例来使用和区分测试一测试二测试三 编写程序查看激活的yml文件本文小结 业务场景 …...

VirtualMonitor虚拟显示器:三步打造你的专业级多屏工作空间
VirtualMonitor虚拟显示器:三步打造你的专业级多屏工作空间 【免费下载链接】VirtualMonitor 项目地址: https://gitcode.com/gh_mirrors/vi/VirtualMonitor 在当今数字化工作环境中,单一显示器的局限性日益凸显,而硬件扩展的成本和空…...

对比实测不同模型通过统一API调用的响应延迟体感
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比实测不同模型通过统一API调用的响应延迟体感 在开发过程中,当我们接入多个大模型服务时,一个直观的体验…...

如何为永久在线的CRM网站接入稳定的大模型API服务
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 如何为永久在线的CRM网站接入稳定的大模型API服务 对于需要7x24小时提供智能客服或数据分析的CRM网站而言,后台服务的稳…...

华为设备Traffic Policy配置避坑指南:ACL规则顺序与Classifier匹配逻辑详解
华为设备Traffic Policy配置避坑指南:ACL规则顺序与Classifier匹配逻辑详解 在网络工程师的日常工作中,华为设备的QoS策略配置是一个既基础又复杂的话题。特别是当我们需要对特定流量进行精细控制时,Traffic Policy的正确配置就显得尤为重要。…...

Taotoken按token计费模式带来的开发测试成本变化感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken按token计费模式带来的开发测试成本变化感受 1. 从固定成本到可变成本的转变 在接入大模型API进行开发测试的初期&#x…...

STM32 IAP方案怎么选?内置DFU vs 自写Bootloader,从F1到F4系列实战对比
STM32 IAP方案深度对比:从芯片选型到实战落地 当产品需要支持远程固件更新时,工程师们往往面临一个关键抉择:是采用ST官方内置的DFU方案,还是自行开发Bootloader?这个看似简单的选择背后,实则牵涉到芯片选型…...

Bun 六天完成从 Zig 到 Rust 重写,AI 重写软件大趋势下速度与质量难题待解
Zig 版 Bun 被判“死刑”2026 年 5 月 11 日,Bun 创始人 Jarred Sumner 在 X 上发推文称,“Bun v1.3.14 将于明日发布。如果我们合并 Rust 重写版本,这将是 Zig 的最后一个版本”,宣告了 Zig 版 Bun 的终结。四年前,Bu…...

智能合约钱包自动化交互:ca-agent-skills 技能库解析与实践
1. 项目概述与核心价值最近在梳理智能合约钱包(Smart Contract Wallet)的生态工具时,我注意到了 Portkey 团队开源的ca-agent-skills仓库。这个项目乍一看名字有点抽象,但深入研究后,我发现它解决了一个非常实际且关键…...

终极免费方案:5步解锁Cursor Pro AI编程助手完整功能
终极免费方案:5步解锁Cursor Pro AI编程助手完整功能 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your tria…...

3D高斯溅射优化:LiteGS框架加速训练与渲染
1. 项目概述 3D高斯溅射(3D Gaussian Splatting,简称3DGS)是近年来计算机视觉和图形学领域的一项突破性技术。它通过数百万个各向异性的3D高斯基元来表示场景,能够实现照片级的渲染效果,在自动驾驶、虚拟现实和数字孪生…...