STM32MP157驱动开发——按键驱动(定时器)
内核函数
定时器涉及函数参考内核源码:include\linux\timer.h
给定时器的各个参数赋值:
setup_timer(struct timer_list * timer, void (*function)(unsigned long),unsigned long data):
设置定时器:主要是初始化 timer_list 结构体,设置其中的函数、参数。
void add_timer(struct timer_list *timer):
- a) 向内核添加定时器。timer->expires 表示超时时间。
- b) 当超时时间到达,内核就会调用这个函数:timer->function(timer->data)。
修改定时器:
int mod_timer(struct timer_list *timer, unsigned long expires):
- a) 修改定时器的超时时间,
- b) 它等同于:del_timer(timer); timer->expires = expires; add_timer(timer);
- c) 但是更加高效。
修改定时器:
int del_timer(struct timer_list *timer)
内核定时器时间单位
编译内核时,可以在内核源码根目录下用“ls -a”看到一个隐藏文件.config,它就是内核配置文件。打开后可以看到如下这项:
CONFIG_HZ=100
这是硬件定时器,这表示内核每秒中会发生 100 次系统滴答中断(tick),这是 Linux 系统的心跳。每发生一次 tick 中断,全局变量 jiffies 就会累加 1。CONFIG_HZ=100 表示每个滴答是 10ms。定时器的时间就是基于 jiffies 的,我们修改超时时间时,一般使用这 2种方法:
① 在 add_timer 之前,直接修改:
timer.expires = jiffies + xxx; // xxx 表示多少个滴答后超时,也就是 xxx*10ms
timer.expires = jiffies + 2*HZ; // HZ 等于 CONFIG_HZ ,2*HZ 就相当于 2 秒
② 在 add_timer 之后,使用 mod_timer 修改:
mod_timer(&timer, jiffies + xxx); // xxx 表示多少个滴答后超时,也就是 xxx*10ms
mod_timer(&timer, jiffies + 2*HZ); // HZ 等于 CONFIG_HZ ,2*HZ 就相当于 2 秒
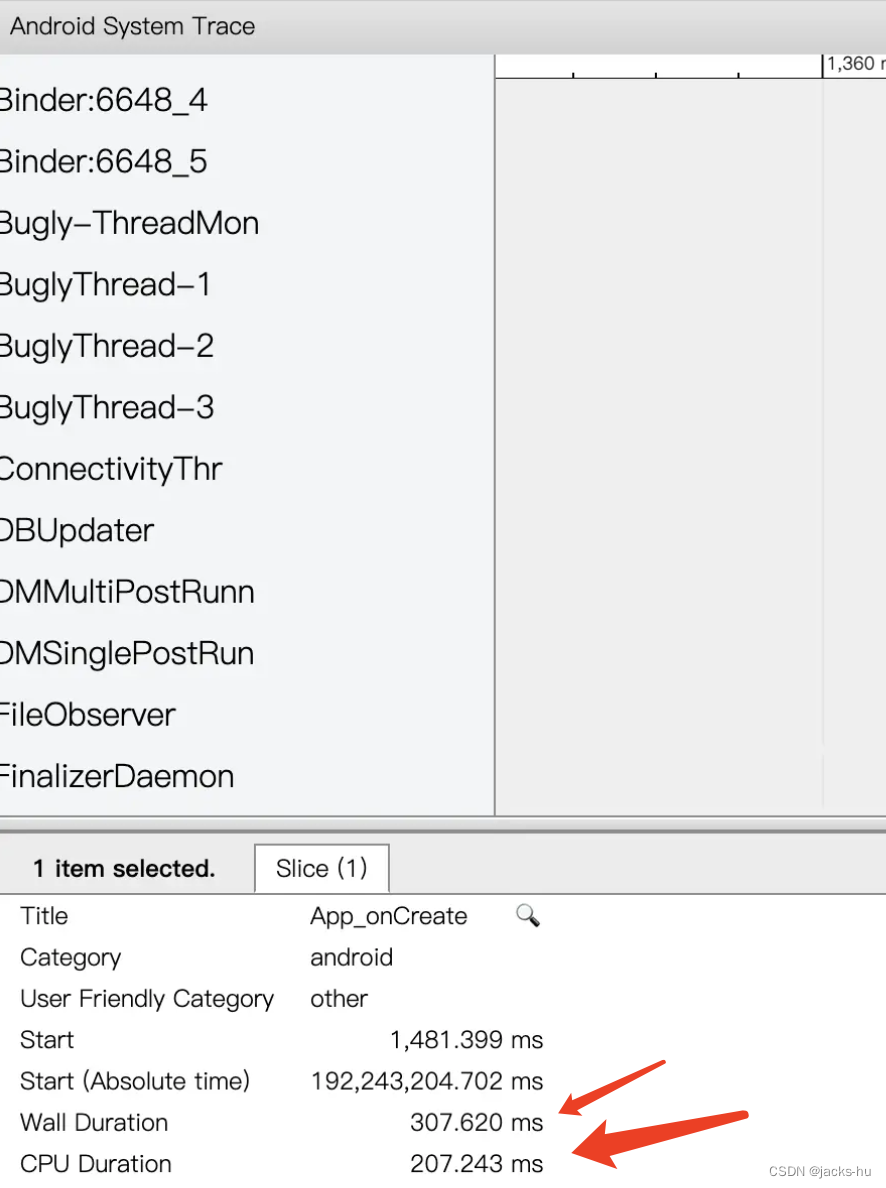
系统滴答中断(tick)与定时器的关系
系统滴答中断是硬件中断,定时器是软件中断,每次执行完硬件中断后才执行软件中断,系统滴答中断设置为100HZ,表示10ms执行一次软件中断,判断全局变量jiffies 是否大于key_timer.expires,大于则调用对应的定时器处理函数
定时器方式的按键驱动程序(stm32mp157)(旧版本定时器)
使用定时器处理按键抖动
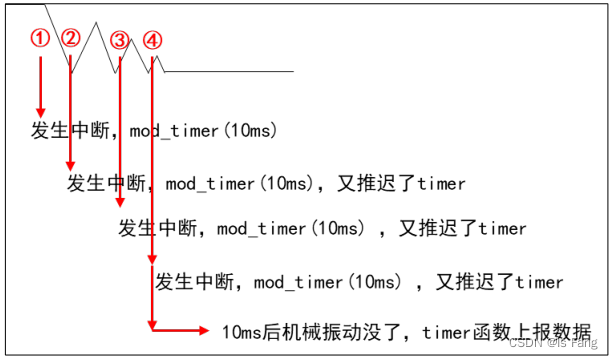
如果不处理抖动的话,用户只操作一次按键, GPIO 电平会反复变化,中断程序可能会上报多个数据,那么可以在 GPIO 中断中并不立刻记录按键值,而是修改定时器超时时间,10ms 后再处理如果 10ms 内又发生了 GPIO 中断,那就认为是抖动,这时再次修改超时时间为 10ms。只有 10ms 之内再无 GPIO 中断发生,那么定时器的函数才会被调用。在定时器函数中记录按键值。
button_test.c
实现功能:首先以非阻塞的方式读取环形缓冲区十次,然后以阻塞的方式读取按键的值
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>static int fd;/** ./button_test /dev/my_gpio_key**/
int main(int argc, char **argv)
{int val;struct pollfd fds[1];int timeout_ms = 5000;int ret;int flags;int i;/* 1. 判断参数 */if (argc != 2) {printf("Usage: %s <dev>\n", argv[0]);return -1;}/* 2. 打开文件 */fd = open(argv[1], O_RDWR | O_NONBLOCK);if (fd == -1){printf("can not open file %s\n", argv[1]);return -1;}//非阻塞的方式读取十次for (i = 0; i < 10; i++) {if (read(fd, &val, 4) == 4)printf("get button: 0x%x\n", val);elseprintf("get button: -1\n");}//修改为阻塞的方式,是休眠唤醒机制,没有数据则休眠flags = fcntl(fd, F_GETFL);fcntl(fd, F_SETFL, flags & ~O_NONBLOCK);while (1){if (read(fd, &val, 4) == 4)printf("get button: 0x%x\n", val);elseprintf("while get button: -1\n");}close(fd);return 0;
}gpio_key_drv.c
#include <linux/module.h>
#include <linux/poll.h>#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>struct gpio_key{int gpio;struct gpio_desc *gpiod;int flag;int irq;struct timer_list key_timer;//每个按键都有定时器
} ;static struct gpio_key *gpio_keys_first;/* 主设备号 */
static int major = 0;
static struct class *gpio_key_class;/* 环形缓冲区 */
#define BUF_LEN 128
static int g_keys[BUF_LEN];
static int r, w;struct fasync_struct *button_fasync;#define NEXT_POS(x) ((x+1) % BUF_LEN)static int is_key_buf_empty(void)
{return (r == w);
}static int is_key_buf_full(void)
{return (r == NEXT_POS(w));
}static void put_key(int key)
{if (!is_key_buf_full()){g_keys[w] = key;w = NEXT_POS(w);}
}static int get_key(void)
{int key = 0;if (!is_key_buf_empty()){key = g_keys[r];r = NEXT_POS(r);}return key;
}static DECLARE_WAIT_QUEUE_HEAD(gpio_key_wait);//定时中断函数:完成按键状态的返回
static void key_timer_expire(unsigned long data)
{/* data ==> gpio */struct gpio_key *gpio_key = data;int val;int key;val = gpiod_get_value(gpio_key->gpiod);printk("key_timer_expire key %d %d\n", gpio_key->gpio, val);key = (gpio_key->gpio << 8) | val;put_key(key);wake_up_interruptible(&gpio_key_wait);kill_fasync(&button_fasync, SIGIO, POLL_IN);
}/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t gpio_key_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);int err;int key;if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))return -EAGAIN;wait_event_interruptible(gpio_key_wait, !is_key_buf_empty());key = get_key();err = copy_to_user(buf, &key, 4);return 4;
}static unsigned int gpio_key_drv_poll(struct file *fp, poll_table * wait)
{printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);poll_wait(fp, &gpio_key_wait, wait);return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}static int gpio_key_drv_fasync(int fd, struct file *file, int on)
{if (fasync_helper(fd, file, on, &button_fasync) >= 0)return 0;elsereturn -EIO;
}/* 定义自己的file_operations结构体 */
static struct file_operations gpio_key_drv = {.owner = THIS_MODULE,.read = gpio_key_drv_read,.poll = gpio_key_drv_poll,.fasync = gpio_key_drv_fasync,
};//按键中断处理函数不会直接返回按键的状态,而是通过调用定时器中断
static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{struct gpio_key *gpio_key = dev_id;printk("gpio_key_isr key %d irq happened\n", gpio_key->gpio);mod_timer(&gpio_key->key_timer, jiffies + HZ/50);//使用HZ宏,定时器超时时间为20ms,如果超时时间到了,就会修改key_timer的值,导致key_timer_expire函数被调用return IRQ_HANDLED;
}/* 1. 从platform_device获得GPIO* 2. gpio=>irq* 3. request_irq*/
static int gpio_key_probe(struct platform_device *pdev)
{int err;struct device_node *node = pdev->dev.of_node;int count;int i;enum of_gpio_flags flag;printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);count = of_gpio_count(node);if (!count){printk("%s %s line %d, there isn't any gpio available\n", __FILE__, __FUNCTION__, __LINE__);return -1;}gpio_keys_first= kzalloc(sizeof(struct gpio_key) * count, GFP_KERNEL);for (i = 0; i < count; i++){ gpio_keys_first[i].gpio = of_get_gpio_flags(node, i, &flag);if (gpio_keys_first[i].gpio < 0){printk("%s %s line %d, of_get_gpio_flags fail\n", __FILE__, __FUNCTION__, __LINE__);return -1;}gpio_keys_first[i].gpiod = gpio_to_desc(gpio_keys_first[i].gpio);gpio_keys_first[i].flag = flag & OF_GPIO_ACTIVE_LOW;gpio_keys_first[i].irq = gpio_to_irq(gpio_keys_first[i].gpio);//每个按键都注册定时中断函数setup_timer(&gpio_keys_first[i].key_timer, key_timer_expire, &gpio_keys_first[i]);gpio_keys_first[i].key_timer.expires = ~0;add_timer(&gpio_keys_first[i].key_timer);}for (i = 0; i < count; i++){err = request_irq(gpio_keys_first[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, "my_gpio_key", &gpio_keys_first[i]);}/* 注册file_operations */major = register_chrdev(0, "my_gpio_key", &gpio_key_drv); /* /dev/gpio_key */gpio_key_class = class_create(THIS_MODULE, "my_gpio_key_class");if (IS_ERR(gpio_key_class)) {printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "my_gpio_key");return PTR_ERR(gpio_key_class);}device_create(gpio_key_class, NULL, MKDEV(major, 0), NULL, "my_gpio_key"); /* /dev/my_gpio_key */return 0;}static int gpio_key_remove(struct platform_device *pdev)
{//int err;struct device_node *node = pdev->dev.of_node;int count;int i;device_destroy(gpio_key_class, MKDEV(major, 0));class_destroy(gpio_key_class);unregister_chrdev(major, "my_gpio_key");count = of_gpio_count(node);for (i = 0; i < count; i++){free_irq(gpio_keys_first[i].irq, &gpio_keys_first[i]);del_timer(&gpio_keys_first[i].key_timer);}kfree(gpio_keys_first);return 0;
}static const struct of_device_id my_keys[] = {{ .compatible = "first_key,gpio_key" },{ },
};/* 1. 定义platform_driver */
static struct platform_driver gpio_keys_driver = {.probe = gpio_key_probe,.remove = gpio_key_remove,.driver = {.name = "my_gpio_key",.of_match_table = my_keys,},
};/* 2. 在入口函数注册platform_driver */
static int __init gpio_key_init(void)
{int err;printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);err = platform_driver_register(&gpio_keys_driver); return err;
}/* 3. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数* 卸载platform_driver*/
static void __exit gpio_key_exit(void)
{printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);platform_driver_unregister(&gpio_keys_driver);
}/* 7. 其他完善:提供设备信息,自动创建设备节点 */module_init(gpio_key_init);
module_exit(gpio_key_exit);MODULE_LICENSE("GPL");
Makefile
# 1. 使用不同的开发板内核时, 一定要修改KERN_DIR
# 2. KERN_DIR中的内核要事先配置、编译, 为了能编译内核, 要先设置下列环境变量:
# 2.1 ARCH, 比如: export ARCH=arm64
# 2.2 CROSS_COMPILE, 比如: export CROSS_COMPILE=aarch64-linux-gnu-
# 2.3 PATH, 比如: export PATH=$PATH:/home/book/100ask_roc-rk3399-pc/ToolChain-6.3.1/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin
# 注意: 不同的开发板不同的编译器上述3个环境变量不一定相同,
# 请参考各开发板的高级用户使用手册KERN_DIR = /home/book/100ask_stm32mp157_pro-sdk/Linux-5.4all:make -C $(KERN_DIR) M=`pwd` modules $(CROSS_COMPILE)gcc -o button_test button_test.c
clean:make -C $(KERN_DIR) M=`pwd` modules cleanrm -rf modules.order button_test# 参考内核源码drivers/char/ipmi/Makefile
# 要想把a.c, b.c编译成ab.ko, 可以这样指定:
# ab-y := a.o b.o
# obj-m += ab.oobj-m += gpio_key_drv.o
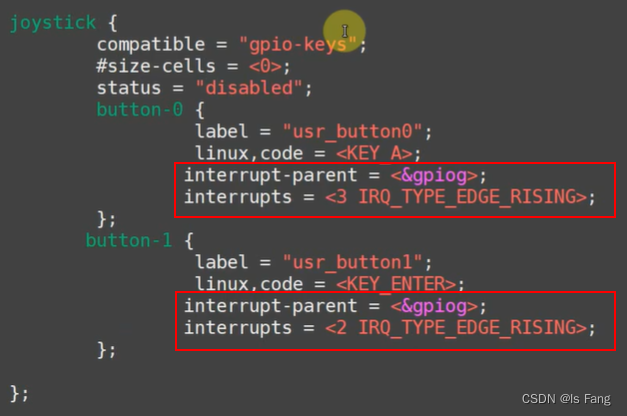
修改设备树文件

对于一个引脚要用作中断时,
- a) 要通过 PinCtrl 把它设置为 GPIO 功能;【ST 公司对于 STM32MP157 系列芯片,GPIO 为默认模式 不需要再进行配置Pinctrl 信息】
- b) 表明自身:是哪一个 GPIO 模块里的哪一个引脚【修改设备树】
打开内核的设备树文件:arch/arm/boot/dts/stm32mp157c-100ask-512d-lcd-v1.dts
gpio_keys_first {compatible = "first_key,gpio_key";gpios = <&gpiog 3 GPIO_ACTIVE_LOW&gpiog 2 GPIO_ACTIVE_LOW>;
};
与此同时,需要把用到引脚的节点禁用
注意,如果其他设备树文件也用到该节点,需要设置属性为disabled状态,在arch/arm/boot/dts目录下执行如下指令查找哪些设备树用到该节点
grep "&gpiog" * -nr
如果用到该节点,需要添加属性去屏蔽:
status = "disabled";
编译测试
首先要设置 ARCH、CROSS_COMPILE、PATH 这三个环境变量后,进入 ubuntu 上板子内核源码的目录,在Linux内核源码根目录下,执行如下命令即可编译 dtb 文件:
make dtbs V=1
编译好的文件在路径由DTC指定,移植设备树到开发板的共享文件夹中,先保存源文件,然后覆盖源文件,重启后会挂载新的设备树,进入该目录查看是否有新添加的设备节点
cd /sys/firmware/devicetree/base
编译驱动程序,在Makefile文件目录下执行make指令,此时,目录下有编译好的内核模块gpio_key_drv.ko和可执行文件button_test文件移植到开发板上
确定一下烧录系统:cat /proc/mounts,查看boot分区挂载的位置,将其重新挂载在boot分区:mount /dev/mmcblk2p2 /boot,然后将共享文件夹里面的设备树文件拷贝到boot目录下,这样的话设备树文件就在boot目录下
cp /mnt/stm32mp157c-100ask-512d-lcd-v1.dtb /boot
重启后挂载,运行
insmod -f gpio_key_drv.ko // 强制安装驱动程序
ls /dev/my_gpio_key
./button_test /dev/my_gpio_key & //后台运行,此时prink函数打印的内容看不到
然后按下按键
定时器方式的按键驱动程序(stm32mp157)(新版本定时器)
高版本的定时器的函数和结构体发生变化,具体变化如下:
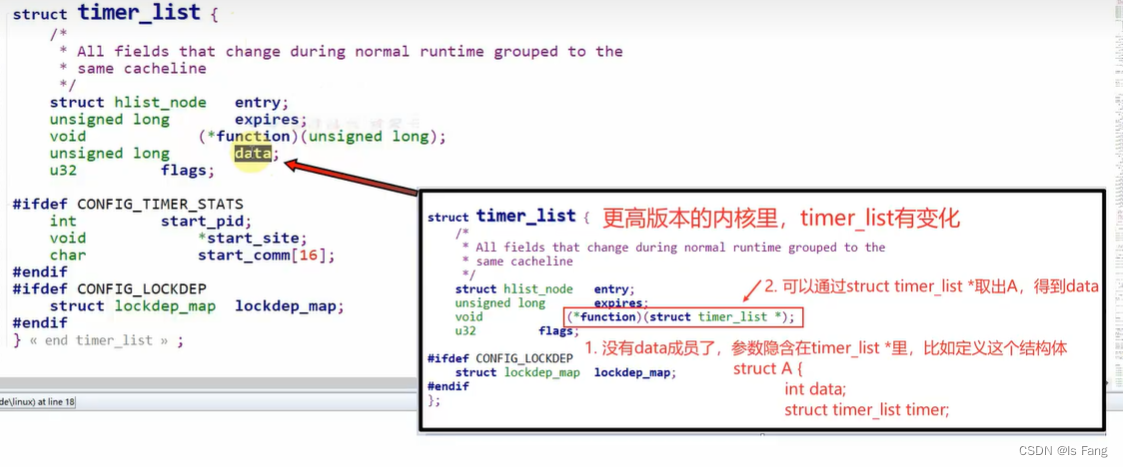

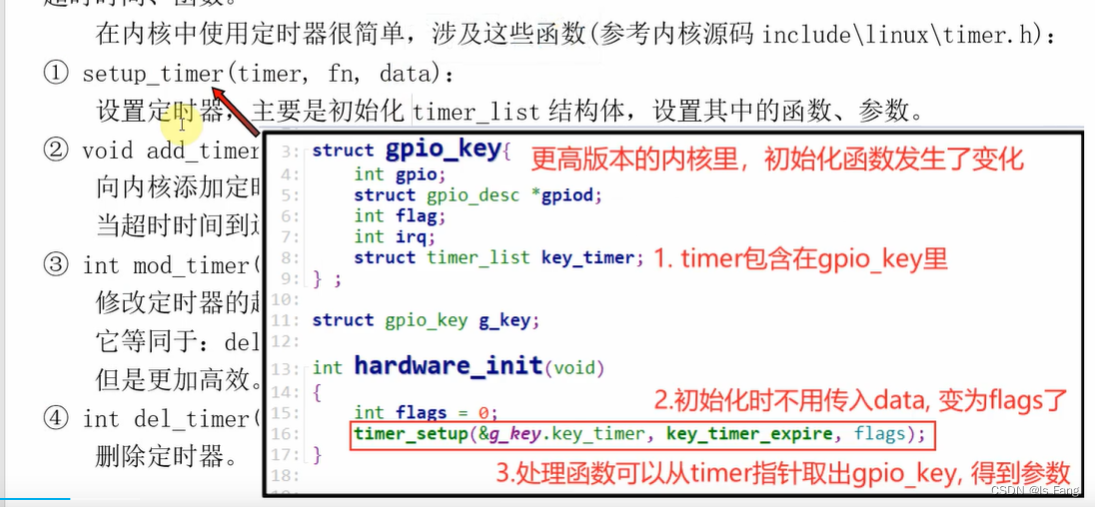
所以只需要修改timer_setup函数和定时器中断处理函数
修改gpio_key_drv.c
#include <linux/module.h>
#include <linux/poll.h>#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>struct gpio_key{int gpio;struct gpio_desc *gpiod;int flag;int irq;struct timer_list key_timer;//每个按键都有定时器
} ;static struct gpio_key *gpio_keys_first;/* 主设备号 */
static int major = 0;
static struct class *gpio_key_class;/* 环形缓冲区 */
#define BUF_LEN 128
static int g_keys[BUF_LEN];
static int r, w;struct fasync_struct *button_fasync;#define NEXT_POS(x) ((x+1) % BUF_LEN)static int is_key_buf_empty(void)
{return (r == w);
}static int is_key_buf_full(void)
{return (r == NEXT_POS(w));
}static void put_key(int key)
{if (!is_key_buf_full()){g_keys[w] = key;w = NEXT_POS(w);}
}static int get_key(void)
{int key = 0;if (!is_key_buf_empty()){key = g_keys[r];r = NEXT_POS(r);}return key;
}static DECLARE_WAIT_QUEUE_HEAD(gpio_key_wait);//定时中断函数:完成按键状态的返回
//static void key_timer_expire(unsigned long data)
static void key_timer_expire(struct timer_list *t)
{/* data ==> gpio *///struct gpio_key *gpio_key = data;//利用from_timer函数的定时器成员反算出结构体的指针,进而获得该结构体的所有信息struct gpio_key *gpio_key = from_timer(gpio_key, t, key_timer);int val;int key;val = gpiod_get_value(gpio_key->gpiod);printk("key_timer_expire key %d %d\n", gpio_key->gpio, val);key = (gpio_key->gpio << 8) | val;put_key(key);wake_up_interruptible(&gpio_key_wait);kill_fasync(&button_fasync, SIGIO, POLL_IN);
}/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t gpio_key_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);int err;int key;if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))return -EAGAIN;wait_event_interruptible(gpio_key_wait, !is_key_buf_empty());key = get_key();err = copy_to_user(buf, &key, 4);return 4;
}static unsigned int gpio_key_drv_poll(struct file *fp, poll_table * wait)
{printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);poll_wait(fp, &gpio_key_wait, wait);return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}static int gpio_key_drv_fasync(int fd, struct file *file, int on)
{if (fasync_helper(fd, file, on, &button_fasync) >= 0)return 0;elsereturn -EIO;
}/* 定义自己的file_operations结构体 */
static struct file_operations gpio_key_drv = {.owner = THIS_MODULE,.read = gpio_key_drv_read,.poll = gpio_key_drv_poll,.fasync = gpio_key_drv_fasync,
};//按键中断处理函数不会直接返回按键的状态,而是通过调用定时器中断
static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{struct gpio_key *gpio_key = dev_id;printk("gpio_key_isr key %d irq happened\n", gpio_key->gpio);mod_timer(&gpio_key->key_timer, jiffies + HZ/50);//使用HZ宏,定时器超时时间为20ms,如果超时时间到了,就会修改key_timer的值,导致key_timer_expire函数被调用return IRQ_HANDLED;
}/* 1. 从platform_device获得GPIO* 2. gpio=>irq* 3. request_irq*/
static int gpio_key_probe(struct platform_device *pdev)
{int err;struct device_node *node = pdev->dev.of_node;int count;int i;enum of_gpio_flags flag;printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);count = of_gpio_count(node);if (!count){printk("%s %s line %d, there isn't any gpio available\n", __FILE__, __FUNCTION__, __LINE__);return -1;}gpio_keys_first= kzalloc(sizeof(struct gpio_key) * count, GFP_KERNEL);for (i = 0; i < count; i++){ gpio_keys_first[i].gpio = of_get_gpio_flags(node, i, &flag);if (gpio_keys_first[i].gpio < 0){printk("%s %s line %d, of_get_gpio_flags fail\n", __FILE__, __FUNCTION__, __LINE__);return -1;}gpio_keys_first[i].gpiod = gpio_to_desc(gpio_keys_first[i].gpio);gpio_keys_first[i].flag = flag & OF_GPIO_ACTIVE_LOW;gpio_keys_first[i].irq = gpio_to_irq(gpio_keys_first[i].gpio);//每个按键都注册定时中断函数//setup_timer(&gpio_keys_first[i].key_timer, key_timer_expire, &gpio_keys_first[i]);timer_setup(&gpio_keys_first[i].key_timer, key_timer_expire, 0);gpio_keys_first[i].key_timer.expires = ~0;add_timer(&gpio_keys_first[i].key_timer);}for (i = 0; i < count; i++){err = request_irq(gpio_keys_first[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, "my_gpio_key", &gpio_keys_first[i]);}/* 注册file_operations */major = register_chrdev(0, "my_gpio_key", &gpio_key_drv); /* /dev/gpio_key */gpio_key_class = class_create(THIS_MODULE, "my_gpio_key_class");if (IS_ERR(gpio_key_class)) {printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "my_gpio_key");return PTR_ERR(gpio_key_class);}device_create(gpio_key_class, NULL, MKDEV(major, 0), NULL, "my_gpio_key"); /* /dev/my_gpio_key*/return 0;}static int gpio_key_remove(struct platform_device *pdev)
{//int err;struct device_node *node = pdev->dev.of_node;int count;int i;device_destroy(gpio_key_class, MKDEV(major, 0));class_destroy(gpio_key_class);unregister_chrdev(major, "my_gpio_key");count = of_gpio_count(node);for (i = 0; i < count; i++){free_irq(gpio_keys_first[i].irq, &gpio_keys_first[i]);del_timer(&gpio_keys_first[i].key_timer);}kfree(gpio_keys_first);return 0;
}static const struct of_device_id my_keys[] = {{ .compatible = "first_key,gpio_key" },{ },
};/* 1. 定义platform_driver */
static struct platform_driver gpio_keys_driver = {.probe = gpio_key_probe,.remove = gpio_key_remove,.driver = {.name = "my_gpio_key",.of_match_table = my_keys,},
};/* 2. 在入口函数注册platform_driver */
static int __init gpio_key_init(void)
{int err;printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);err = platform_driver_register(&gpio_keys_driver); return err;
}/* 3. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数* 卸载platform_driver*/
static void __exit gpio_key_exit(void)
{printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);platform_driver_unregister(&gpio_keys_driver);
}/* 7. 其他完善:提供设备信息,自动创建设备节点 */module_init(gpio_key_init);
module_exit(gpio_key_exit);MODULE_LICENSE("GPL");
相关文章:
STM32MP157驱动开发——按键驱动(定时器)
内核函数 定时器涉及函数参考内核源码:include\linux\timer.h 给定时器的各个参数赋值: setup_timer(struct timer_list * timer, void (*function)(unsigned long),unsigned long data):设置定时器:主要是初始化 timer_list 结…...
基于Centos 7虚拟机的磁盘操作(添加磁盘、分区、格式分区、挂载)
目录 一、添加硬盘 二、查看新磁盘 三、磁盘分区 3.1新建分区 3.2 格式分区 3.3 挂载分区 3.4 永久挂载新分区 3.5 取消挂载分区 一、添加硬盘 1.在虚拟机处选择编辑虚拟机设置,然后选择添加 2.选择硬盘,然后选择下一步 3.默认即可,下一步…...

“完全指南:理解API和商品详情的作用和关系“
当涉及到电子商务和在线交易时,API和商品详情是两个至关重要的概念。本文将为您提供一个详尽的指南,帮助您全面理解API和商品详情之间的作用和关系。 淘宝/天猫获得淘宝商品详情 API 返回值说明 公共参数 请求地址 名称类型必须描述keyString是调用…...
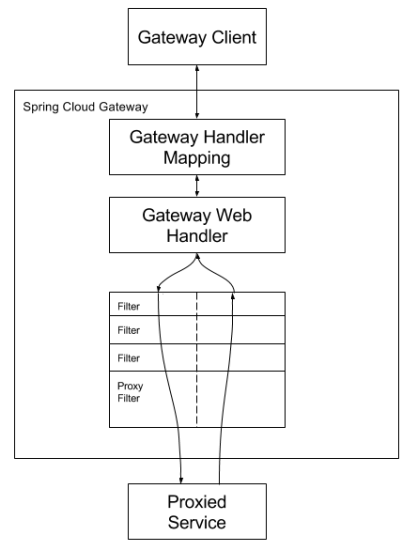
Spring Cloud Gateway - 新一代微服务API网关
Spring Cloud Gateway - 新一代微服务API网关 文章目录 Spring Cloud Gateway - 新一代微服务API网关1.网关介绍2.Spring Cloud Gateway介绍3.Spring Cloud Gateway的特性4.Spring Cloud Gateway的三大核心概念5.Gateway工作流程6.Gateway核心配置7.动态路由8.Predicate自定义P…...
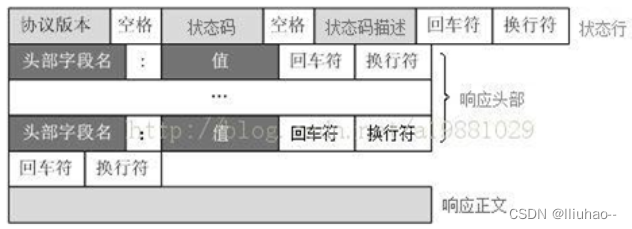
HTTP超本文传输协议
HTTP超本文传输协议 HTTP简介HTTP请求与响应HTTP请求请求行请求头空行请求体 HTTP响应响应行响应头空行响应体 HTTP请求方法GET和POST之间的区别HTTP为什么是无状态的cookie原理session 原理cookie 和 session 的区别cookie如何设置cookie被禁止后如何使用session HTTP简介 HT…...
React+Redux 数据存储持久化
ReactRedux 数据存储持久化 1、安装相关依赖 yarn add reduxjs/toolkit redux redux-persist 2、userSlice:用户状态数据切片封装 import { createSlice, PayloadAction } from reduxjs/toolkitinterface IUserInfo {userName: stringavatar?: stringbrief?: st…...

Redis高可用部署架构
目录 1. 主从复制与哨兵架构:2. Redis集群架构: Redis高可用部署可以采用主从复制与哨兵架构或Redis集群架构。下面将分别介绍这两种架构的架构图、优缺点和具体应用场景。 1. 主从复制与哨兵架构: 架构图: ----------| Client…...
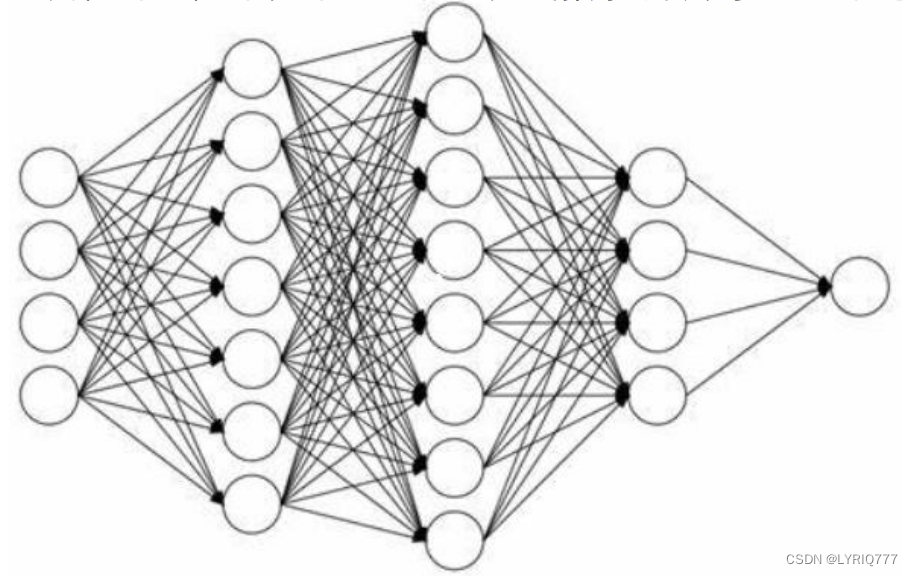
深度学习与神经网络
人工智能,机器学习,深度学习,神经网络,emmmm,傻傻分不清楚,这都啥呀,你知道吗?我不知道。你知道吗?我不知道。 来来来,接下来,整硬菜:…...
CPU密集型和IO密集型任务的权衡:如何找到最佳平衡点
关于作者:CSDN内容合伙人、技术专家, 从零开始做日活千万级APP。 专注于分享各领域原创系列文章 ,擅长java后端、移动开发、人工智能等,希望大家多多支持。 目录 一、导读二、概览三、CPU密集型与IO密集型3.1、CPU密集型3.2、I/O密…...

超越POSIX:一个时代的终结?
在本文中,我们通过对Portable Operating System Interface(POSIX)抽象的历史演变进行系统性的回顾,提供了一个全面的视图。我们讨论了推动这些演变的一些关键因素,并确定了在构建现代应用程序时使它们不可行的缺陷。 …...

秋招算法备战第22天 | 654.最大二叉树、617.合并二叉树、700.二叉搜索树中的搜索、98.验证二叉搜索树
235. 二叉搜索树的最近公共祖先 - 力扣(LeetCode) 在一个二叉搜索树中,两个节点 p 和 q 的最近公共祖先可以通过以下的算法找到: 从根节点开始。如果当前节点的值大于 p 和 q 的值,那么你需要转向左子树。因为在二叉…...
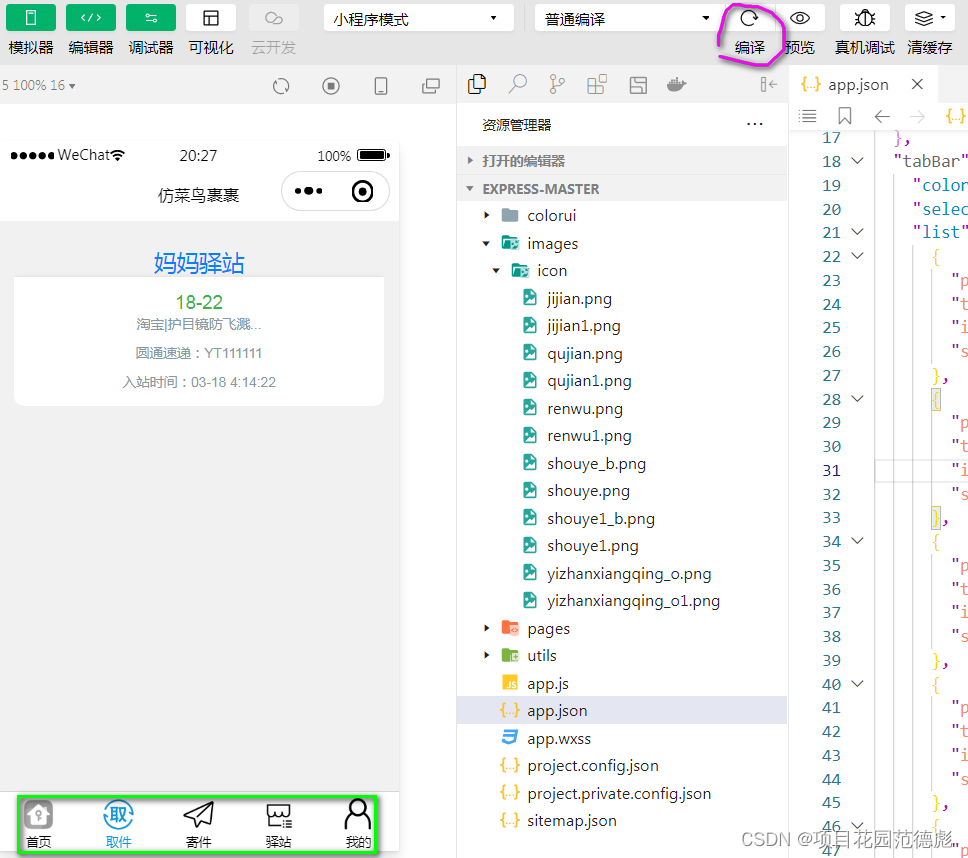
小程序之移花宫-自定义底部标签图标---【浅入深出系列005】
浅入深出系列总目录在000集 如何0元学微信小程序–【浅入深出系列000】 不会导入/打开小程序的看这里 让别人的小程序长成自己的样子-更换window上下颜色–【浅入深出系列001】 文章目录 本系列校训学习资源的选择 学习目标图标的注意事项图标资源打开小程序动手实践找到图标最…...
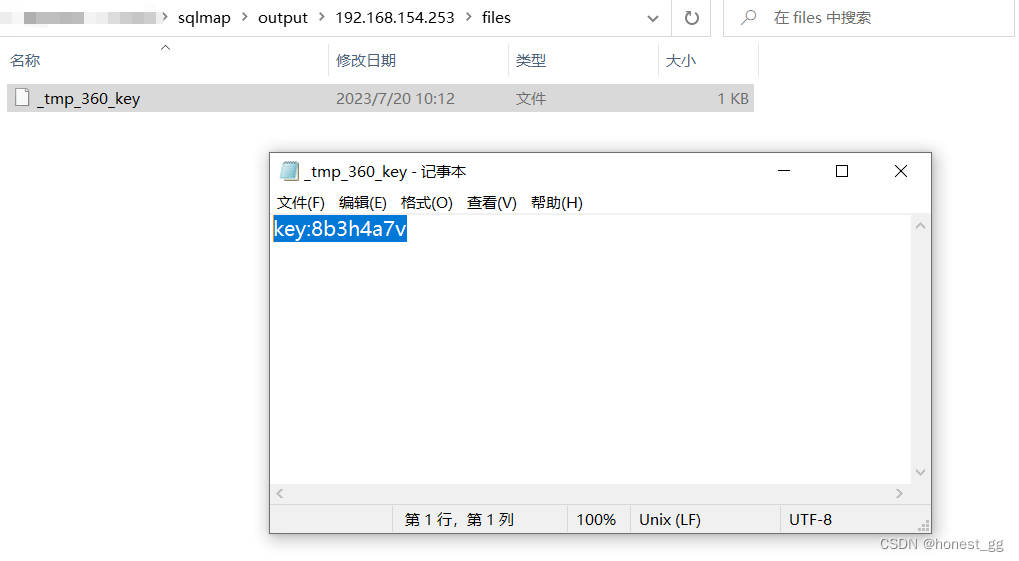
题目1 SQL注入(保姆级教程)
url:http://192.168.154.253:81/ #打开http://XXX:81/,XXX为靶机的ip地址 审题 1、打开题目看到有一个提示,此题目需要通过SQL注入漏洞读取/tmp/360/key文件,key在这个文件中 2、开始答题 发现这里url中有一个id的参数࿰…...

PDF转换成word乱码了怎么办?最实用的方法在这里!
在日常办公中,我们常常需要将PDF文件转换成Word文件,以便于编辑和修改。然而有时候在PDF转Word的过程中可能会遇到乱码的问题,让人感到困扰。在面对这种情况时,我们需要选择正确的方法,避免文件转换后出现乱码。下面我…...

字节跳动后端面试,笔试部分
var code "7022f444-ded0-477c-9afe-26812ca8e7cb" 背景 笔者在刷B站的时候,看到了一个关于面试的实录,前半段是八股文,后半段是笔试部分,感觉笔试部分的题目还是挺有意思的,特此记录一下。 笔试部分 问…...

[JavaScript游戏开发] 2D二维地图绘制、人物移动、障碍检测
系列文章目录 第一章 2D二维地图绘制、人物移动、障碍检测 第二章 跟随人物二维动态地图绘制、自动寻径、小地图显示(人物红点显示) 文章目录 系列文章目录前言一、列计划1.1、目标1.2、步骤 二、使用步骤2.1、准备素材(图片):草坪、人物(熊猫)、障碍(石头)2.2、初…...
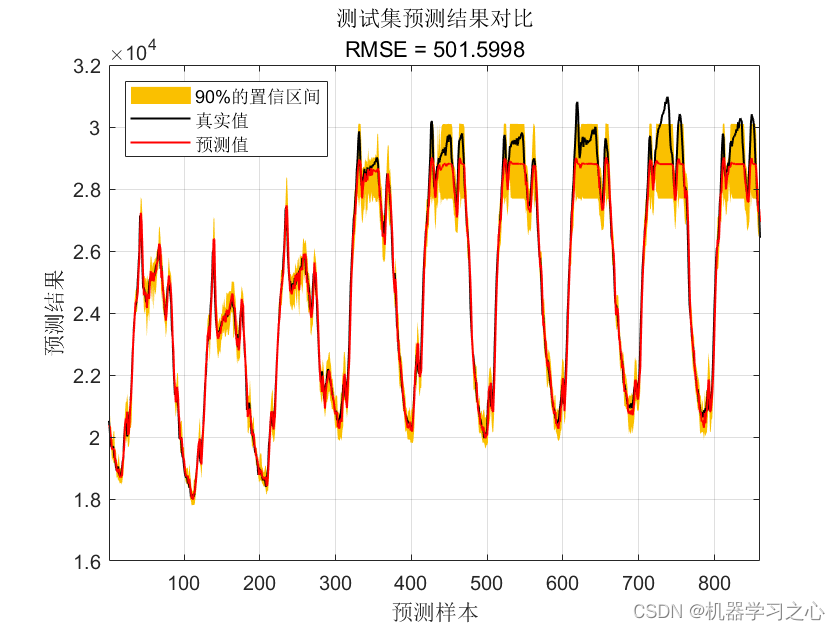
区间预测 | MATLAB实现基于QRF随机森林分位数回归时间序列区间预测模型
区间预测 | MATLAB实现基于QRF随机森林分位数回归时间序列区间预测模型 目录 区间预测 | MATLAB实现基于QRF随机森林分位数回归时间序列区间预测模型效果一览基本介绍程序设计参考资料 效果一览 基本介绍 1.Matlab实现基于QRF随机森林分位数回归时间序列区间预测模型࿱…...
.NET网络编程——TCP通信
一、网络编程的基本概念 : 1. 网络 就是将不同区域的电脑连接到一起,组成局域网、城域网或广域网。把分部在不同地理区域的计算机于专门的外部设备用通信线路 互联成一个规模大、功能强的网络系统,从而使众多的计算机可以方便地互相传递信息,…...
【Python机器学习】实验01 Numpy以及可视化回顾
文章目录 一、Numpy的基础知识实验1 生成由随机数组成的三通道图片,分别显示每个维度图片,并将三个通道的像素四周进行填充,分别从上下左右各填充若干数据。 二、Numpy的线性代数运算实验2 请准备一张图片,按照上面的过程进行矩阵…...
vue3-组件中的变化
1. 路由 1. 安装指令:npm i vue-routernext 2. 创建路由:createRouter2. 异步组件(defineAsyncComponent) defineAsyncComponent 是用于定义异步组件的函数。defineAsyncComponent 接受一个工厂函数作为参数,这个工厂…...

用CC2530 DIY一个无线串口透传模块:基于Zigbee的无线数据收发实践
基于CC2530的Zigbee无线串口透传模块实战指南 在物联网和智能硬件开发领域,无线数据传输一直是核心需求之一。CC2530作为一款集成了Zigbee射频前端的经典芯片,其成本效益和成熟生态使其成为众多开发者的首选。本文将带您深入探索如何利用两块CC2530开发板…...

2026年现代软件项目样板:架构设计、工具链与工程化实践全解析
1. 项目概述:从仓库名到项目蓝图看到advhcghbot/sample-project-2026这个仓库名,第一反应可能有点懵。这不像一个功能明确的工具名,更像是一个用于演示、测试或作为起点的“样本项目”。在软件开发领域,尤其是开源社区和团队协作中…...

OpenClaw Auto Backup:基于Git的自动化数据备份与版本管理实战
1. 项目概述与核心价值最近在整理服务器上的项目文件和开发环境时,我又一次遇到了那个老问题:数据备份。手动执行git add . && git commit -m “update” && git push不仅繁琐,还容易忘记。对于需要备份多个目录,…...

EPLAN浮动许可利用率低:软件许可浪费,解决许可不足
EPLAN浮动许可利用率低?别再浪费了!你是不是也遇到过这种事:新项目启动前看许可证池还有几个名额,结果发现上个月的几个许可证一直在等?我就踩了这个坑,发现公司用EPLAN的几个项目组天天在"抢"许…...

终极指南:免费解锁WeMod高级功能的完整方案
终极指南:免费解锁WeMod高级功能的完整方案 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod Pro的订阅费用而犹豫吗?…...

【ElevenLabs企业级接入白皮书】:基于17个生产环境案例验证的鉴权体系重构、多租户语音隔离与GDPR合规审计清单
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs企业级接入的演进动因与白皮书方法论 企业语音合成需求正从“能发声”跃迁至“有角色、可治理、可审计、可集成”。ElevenLabs 企业级 API 的演进并非单纯性能叠加,而是响应 GDPR…...

IO-Link技术解析:工业自动化通信与LTC2874/LT3669芯片应用
1. IO-Link技术概述:工业自动化的神经末梢在工业4.0的浪潮中,设备间的实时通信如同工厂的神经系统。IO-Link作为这个系统中的"神经末梢",实现了控制层与现场设备间的最后一米连接。这项技术最早由PROFIBUS用户组织在2009年推出&…...

5分钟掌握猫抓浏览器扩展:免费视频下载和媒体嗅探终极指南
5分钟掌握猫抓浏览器扩展:免费视频下载和媒体嗅探终极指南 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 猫抓(cat-catch)是一款专业的…...

基于RK3568与CODESYS的工业边缘控制器:软PLC如何重塑自动化设备核心
1. 为什么工业自动化需要软PLC? 记得五年前我第一次接触传统PLC时,被它的价格吓了一跳。一台西门子S7-1200基础型号就要上万元,加上各种扩展模块轻松突破两万。更让我头疼的是,每次设备升级都要重新采购硬件,旧设备只能…...

XUnity.AutoTranslator完整指南:让外语游戏瞬间变中文的免费神器
XUnity.AutoTranslator完整指南:让外语游戏瞬间变中文的免费神器 【免费下载链接】XUnity.AutoTranslator 项目地址: https://gitcode.com/gh_mirrors/xu/XUnity.AutoTranslator 还在为语言障碍而无法畅玩海外Unity游戏吗?XUnity.AutoTranslator…...