基于深度学习的高精度交通信号灯检测系统(PyTorch+Pyside6+YOLOv5模型)
摘要:基于深度学习的高精度交通信号灯检测识别可用于日常生活中检测与定位交通信号灯目标,利用深度学习算法可实现图片、视频、摄像头等方式的交通信号灯目标检测识别,另外支持结果可视化与图片或视频检测结果的导出。本系统采用YOLOv5目标检测模型训练数据集,使用Pysdie6库来搭建页面展示系统,同时支持ONNX、PT等模型作为权重模型的输出。本系统支持的功能包括交通信号灯训练模型的导入、初始化;置信分与IOU阈值的调节、图像上传、检测、可视化结果展示、结果导出与结束检测;视频的上传、检测、可视化结果展示、结果导出与结束检测;摄像头的上传、检测、可视化结果展示与结束检测;已检测目标列表、位置信息;前向推理用时。另外本交通信号灯检测系统同时支持原始图像与检测结果图像的同时展示,原始视频与检测结果视频的同时展示。本博文提供了完整的Python代码和使用教程,适合新入门的朋友参考,完整代码资源文件请转至文末的下载链接。

基本介绍
近年来,机器学习和深度学习取得了较大的发展,深度学习方法在检测精度和速度方面与传统方法相比表现出更良好的性能。YOLOv5是单阶段目标检测算法YOLO的第五代,根据实验得出结论,其在速度与准确性能方面都有了明显提升,开源的代码可见https://github.com/ultralytics/yolov5。因此本博文利用YOLOv5检测算法实现一种高精度交通信号灯检测模型,再搭配上Pyside6库写出界面系统,完成目标检测识别页面的开发。注意到YOLO系列算法的最新进展已有YOLOv6、YOLOv7、YOLOv8等算法,将本系统中检测算法替换为最新算法的代码也将在后面发布,欢迎关注收藏。
环境搭建
(1)下载完整文件到自己电脑上,然后使用cmd打开到文件目录
(2)利用Conda创建环境(Anacodna),conda create -n yolo5 python=3.8 然后安装torch和torchvision(pip install torch1.10.0+cu113 torchvision0.11.0+cu113 -f https://download.pytorch.org/whl/torch_stable.html -i https://pypi.tuna.tsinghua.edu.cn/simple)其中-i https://pypi.tuna.tsinghua.edu.cn/simple代表使用清华源,这行命令要求nvidia-smi显示的CUDA版本>=11.3,最后安装剩余依赖包使用:pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple


(3)安装Pyside6库 pip install pyside6==6.3 -i https://pypi.tuna.tsinghua.edu.cn/simple

(4)对于windows系统下的pycocotools库的安装:pip install pycocotools-windows -i https://pypi.tuna.tsinghua.edu.cn/simple
界面及功能展示
下面给出本博文设计的软件界面,整体界面简洁大方,大体功能包括训练模型的导入、初始化;置信分与IOU阈值的调节、图像上传、检测、可视化结果展示、结果导出与结束检测;视频的上传、检测、可视化结果展示、结果导出与结束检测;已检测目标列表、位置信息;前向推理用时。希望大家可以喜欢,初始界面如下图:

模型选择与初始化
用户可以点击模型权重选择按钮上传训练好的模型权重,训练权重格式可为.pt、.onnx以及。engine等,之后再点击模型权重初始化按钮可实现已选择模型初始化信息的设置。


置信分与IOU的改变
在Confidence或IOU下方的输入框中改变值即可同步改变滑动条的进度,同时改变滑动条的进度值也可同步改变输入框的值;Confidence或IOU值的改变将同步到模型里的配置,将改变检测置信度阈值与IOU阈值。
图像选择、检测与导出
用户可以点击选择图像按钮上传单张图片进行检测与识别。

再点击图像检测按钮可完成输入图像的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

再点击检测结果展示按钮可在系统左下方显示输入图像检测的结果,系统将显示识别出图片中的目标的类别、位置和置信度信息。

点击图像检测结果导出按钮即可导出检测后的图像,在保存栏里输入保存的图片名称及后缀即可实现检测结果图像的保存。

点击结束图像检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频按钮来上传图像或视频。
视频选择、检测与导出
用户可以点击选择视频按钮上传视频进行检测与识别,之后系统会将视频的第一帧输入到系统界面的左上方显示。

再点击视频检测按钮可完成输入视频的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

点击暂停视频检测按钮即可实现输入视频的暂停,此时按钮变为继续视频检测,输入视频帧与帧检测结果会保留在系统界面,可点击下拉目标框选择已检测目标的坐标位置信息,再点击继续视频检测按钮即可实现输入视频的检测。
点击视频检测结果导出按钮即可导出检测后的视频,在保存栏里输入保存的图片名称及后缀即可实现检测结果视频的保存。

点击结束视频检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频按钮来上传图像或视频。
摄像头打开、检测与结束
用户可以点击打开摄像头按钮来打开摄像头设备进行检测与识别,之后系统会将摄像头图像输入到系统界面的左上方显示。

再点击摄像头检测按钮可完成输入摄像头的目标检测功能,之后系统会在用时一栏输出检测用时,在目标数量一栏输出已检测到的目标数量,在下拉框可选择已检测目标,对应于目标位置(即xmin、ymin、xmax以及ymax)标签值的改变。

点击结束视频检测按钮即可完成系统界面的刷新,将所有输出信息清空,之后再点击选择图像或选择视频或打开摄像按钮来上传图像、视频或打开摄像头。
算法原理介绍
本系统采用了基于深度学习的单阶段目标检测算法YOLOv5,相比于YOLOv3和YOLOv4,YOLOv5在检测精度和速度上都有很大的提升。YOLOv5算法的核心思想是将目标检测问题转化为一个回归问题,通过直接预测物体中心点的坐标来代替Anchor框。此外,YOLOv5使用SPP(Spatial Pyramid Pooling)的特征提取方法,这种方法可以在不增加计算量的情况下,有效地提取多尺度特征,提高检测性能。YOLOv5s模型的整体结构如下图所示。

YOLOv5网络结构是由Input、Backbone、Neck、Prediction组成。YOLOv5的Input部分是网络的输入端,采用Mosaic数据增强方式,对输入数据随机裁剪,然后进行拼接。Backbone是YOLOv5提取特征的网络部分,特征提取能力直接影响整个网络性能。在特征提取阶段,YOLOv5使用CSPNet(Cross Stage Partial Network)结构,它将输入特征图分为两部分,一部分通过一系列卷积层进行处理,另一部分直接进行下采样,最后将这两部分特征图进行融合。这种设计使得网络具有更强的非线性表达能力,可以更好地处理目标检测任务中的复杂背景和多样化物体。在Neck阶段使用连续的卷积核C3结构块融合特征图。在Prediction阶段,模型使用结果特征图预测目标的中心坐标与尺寸信息。博主觉得YOLOv5不失为一种目标检测的高性能解决方案,能够以较高的准确率对目标进行分类与定位。当然现在YOLOv6、YOLOv7、YOLOv8等算法也在不断提出和改进,后续博主也会将这些算法融入到本系统中,敬请期待。
数据集介绍
本系统使用的交通信号灯数据集手动标注了交通信号灯中红灯、黄灯和绿灯这三个类别,数据集总计7884张图片。该数据集中类别都有大量的旋转和不同的光照条件,有助于训练出更加鲁棒的检测模型。本文实验的交通信号灯检测数据集包含训练集6934张图片,验证集950张图片,选取部分数据部分样本数据集如下图所示。由于YOLOv5算法对输入图片大小有限制,需要将所有图片调整为相同的大小。为了在不影响检测精度的情况下尽可能减小图片的失真,我们将所有图片调整为640x640的大小,并保持原有的宽高比例。此外,为了增强模型的泛化能力和鲁棒性,我们还使用了数据增强技术,包括随机旋转、缩放、裁剪和颜色变换等,以扩充数据集并减少过拟合风险。

关键代码解析
本系统的深度学习模型使用PyTorch实现,基于YOLOv5算法进行目标检测。在训练阶段,我们使用了预训练模型作为初始模型进行训练,然后通过多次迭代优化网络参数,以达到更好的检测性能。在训练过程中,我们采用了学习率衰减和数据增强等技术,以增强模型的泛化能力和鲁棒性。
在测试阶段,我们使用了训练好的模型来对新的图片和视频进行检测。通过设置阈值,将置信度低于阈值的检测框过滤掉,最终得到检测结果。同时,我们还可以将检测结果保存为图片或视频格式,以便进行后续分析和应用。本系统基于YOLOv5算法,使用PyTorch实现。代码中用到的主要库包括PyTorch、NumPy、OpenCV、PyQt等。


Pyside6界面设计
Pyside6是Python语言的GUI编程解决方案之一,可以快速地为Python程序创建GUI应用。在本博文中,我们使用Pyside6库创建一个图形化界面,为用户提供简单易用的交互界面,实现用户选择图片、视频进行目标检测。
我们使用Qt Designer设计图形界面,然后使用Pyside6将设计好的UI文件转换为Python代码。图形界面中包含多个UI控件,例如:标签、按钮、文本框、多选框等。通过Pyside6中的信号槽机制,可以使得UI控件与程序逻辑代码相互连接。
实验结果与分析
在实验结果与分析部分,我们使用精度和召回率等指标来评估模型的性能,还通过损失曲线和PR曲线来分析训练过程。在训练阶段,我们使用了前面介绍的交通信号灯数据集进行训练,使用了YOLOv5算法对数据集训练,总计训练了300个epochs。在训练过程中,我们使用tensorboard记录了模型在训练集和验证集上的损失曲线。从下图可以看出,随着训练次数的增加,模型的训练损失和验证损失都逐渐降低,说明模型不断地学习到更加精准的特征。在训练结束后,我们使用模型在数据集的验证集上进行了评估,得到了以下结果。

下图展示了我们训练的YOLOv5模型在验证集上的PR曲线,从图中可以看出,模型取得了较高的召回率和精确率,整体表现良好。

下图展示了本博文在使用YOLOv5模型对交通信号灯数据集进行训练时候的Mosaic数据增强图像。


综上,本博文训练得到的YOLOv5模型在数据集上表现良好,具有较高的检测精度和鲁棒性,可以在实际场景中应用。另外本博主对整个系统进行了详细测试,最终开发出一版流畅的高精度目标检测系统界面,就是本博文演示部分的展示,完整的UI界面、测试图片视频、代码文件等均已打包上传,感兴趣的朋友可以关注我私信获取。
其他基于深度学习的目标检测系统如西红柿、猫狗、山羊、野生目标、烟头、二维码、头盔、交警、野生动物、野外烟雾、人体摔倒识别、红外行人、家禽猪、苹果、推土机、蜜蜂、打电话、鸽子、足球、奶牛、人脸口罩、安全背心、烟雾检测系统等有需要的朋友关注我,从博主其他视频中获取下载链接。
完整项目目录如下所示:

相关文章:
基于深度学习的高精度交通信号灯检测系统(PyTorch+Pyside6+YOLOv5模型)
摘要:基于深度学习的高精度交通信号灯检测识别可用于日常生活中检测与定位交通信号灯目标,利用深度学习算法可实现图片、视频、摄像头等方式的交通信号灯目标检测识别,另外支持结果可视化与图片或视频检测结果的导出。本系统采用YOLOv5目标检…...
【3D目标检测】DSVT-2023CVPR
论文:https://arxiv.org/pdf/2301.06051.pdf 作者:北大,华为 代码:https://github.com/Haiyang-W/DSVT ( OpenPCDet 框架已集成) 讲解:实时部署!DSVT:3D动态稀疏体素Tr…...
我在VScode学Python(Python函数,Python模块导入)
我的个人博客主页:如果’真能转义1️⃣说1️⃣的博客主页 (1)关于Python基本语法学习---->可以参考我的这篇博客《我在VScode学Python》 (2)pip是必须的在我们学习python这门语言的过程中Python ---->&a…...
【目标跟踪】1、基础知识
文章目录 一、卡尔曼滤波二、匈牙利匹配 一、卡尔曼滤波 什么是卡尔曼滤波?——状态估计器 卡尔曼滤波用于在包含不确定信息的系统中做出预测,对系统下一步要做什么进行推测,且会结合推测值和观测值来得到修正后的最优值卡尔曼滤波就是利用…...

33. 搜索旋转排序数组
题目描述 整数数组 nums 按升序排列,数组中的值 互不相同 。 在传递给函数之前,nums 在预先未知的某个下标 k(0 < k < nums.length)上进行了 旋转,使数组变为 [nums[k], nums[k1], ..., nums[n-1], nums[0], n…...

接口自动化测试要做什么?8个步骤讲的明明白白(小白也能看懂系列)
先了解下接口测试流程: 1、需求分析 2、Api文档分析与评审 3、测试计划编写 4、用例设计与评审 5、环境搭建(工具) 6、执行用例 7、缺陷管理 8、测试报告 那"接口自动化测试"怎么弄?只需要在上篇文章的基础上再梳理下就…...

Flutter 自定义 虚线 分割线
学习使用Flutter 进行 虚线 自定义控件 练习 // 自定义虚线 (默认是垂直方向) class DashedLind extends StatelessWidget {final Axis axis; // 虚线方向final double dashedWidth; // 根据虚线的方向确定自己虚线的宽度final double dashedHeight; //…...

Java毕业设计—爱宠医院管理系统设计与实现
爱宠医院管理系统 获取数论文、代码、答辩PPT、安装包,可以查看文章底部 一、 如何安装及配置环境 要运行整个爱宠医院管理系统需要安装数据库:MySQL 5.5,开发工具:JDK 1.8,开发语开发平台:Eclipse&…...
AI时代带来的图片造假危机,该如何解决
一、前言 当今,图片造假问题非常泛滥,已经成为现代社会中一个严峻的问题。随着AI技术不断的发展,人们可以轻松地通过图像编辑和AI智能生成来篡改和伪造图片,使其看起来真实而难以辨别,之前就看到过一对硕士夫妻为了骗…...
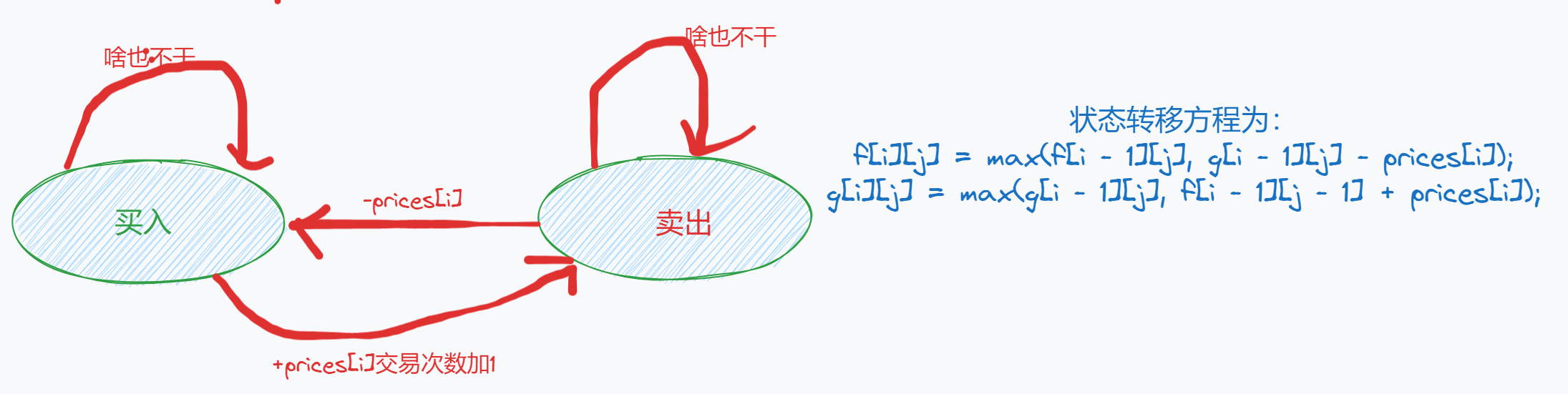
【动态规划】简单多状态
文章目录 动态规划(简单多状态)1. 按摩师2. 打家劫舍 ||3. 删除并获得点数4. 粉刷房子5. 最佳买卖股票时机含冷冻期6. 买卖股票的最佳时机含手续费7. 买卖股票的最佳时机 |||8. 买卖股票的最佳时机 IV 动态规划(简单多状态) 1. 按…...

科技资讯|苹果计划本月推出Vision Pro头显开发套件,电池有重大更新
根据消息源 aaronp613 分享的信息,苹果计划本月底面向开发者,发布 Vision Pro 头显开发套件。消息源还指出苹果更新了 Vision Pro 头显电池组的代号,共有 A2781,A2988 和 A2697 三种不同的型号,目前尚不清楚三者之间的…...

k8s 将pod节点上的文件拷贝到本地
要将 Kubernetes(k8s)中 Pod 节点上的文件拷贝到本地,可以通过使用 kubectl cp 命令来实现。kubectl cp 命令允许你在本地系统和 Pod 之间复制文件和目录。 下面是使用 kubectl cp 命令的语法: kubectl cp <namespace>/&l…...

Git简介与工作原理:了解Git的基本概念、版本控制系统和分布式版本控制的工作原理
🌷🍁 博主 libin9iOak带您 Go to New World.✨🍁 🦄 个人主页——libin9iOak的博客🎐 🐳 《面试题大全》 文章图文并茂🦕生动形象🦖简单易学!欢迎大家来踩踩~ἳ…...

java篇 类的进阶0x02:方法重载
文章目录 方法重载 overload方法签名返回值不属于方法签名的原因: 重载的参数匹配规则 方法重载 overload 多个方法功能很相似,但不完全一样,可以考虑使用方法的重载。 同一个类中,方法可以重名,但是签名不可以重复。…...

Android11 相机拍照权限,以及解决resolveActivity返回null
一、配置拍照和读写权限 <uses-permission android:name"android.permission.CAMERA"/> <uses-feature android:name"android.hardware.camera" /><uses-permission android:name"android.permission.WRITE_EXTERNAL_STORAGE"/&…...
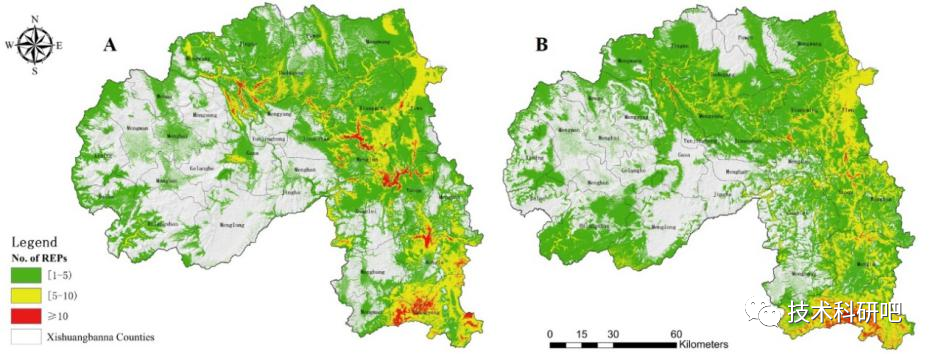
MAXENT模型的生物多样性教程
详情点击链接:基于MAXENT模型的生物多样性生境模拟与保护优先区甄选、自然保护区布局优化及未来气候变化下评估中的应用及论文写作 一:生物多样性保护格局与自然保护区格局优化 1.我国生物多样性格局与分布; 2.我国自然保护区格局与分布&…...
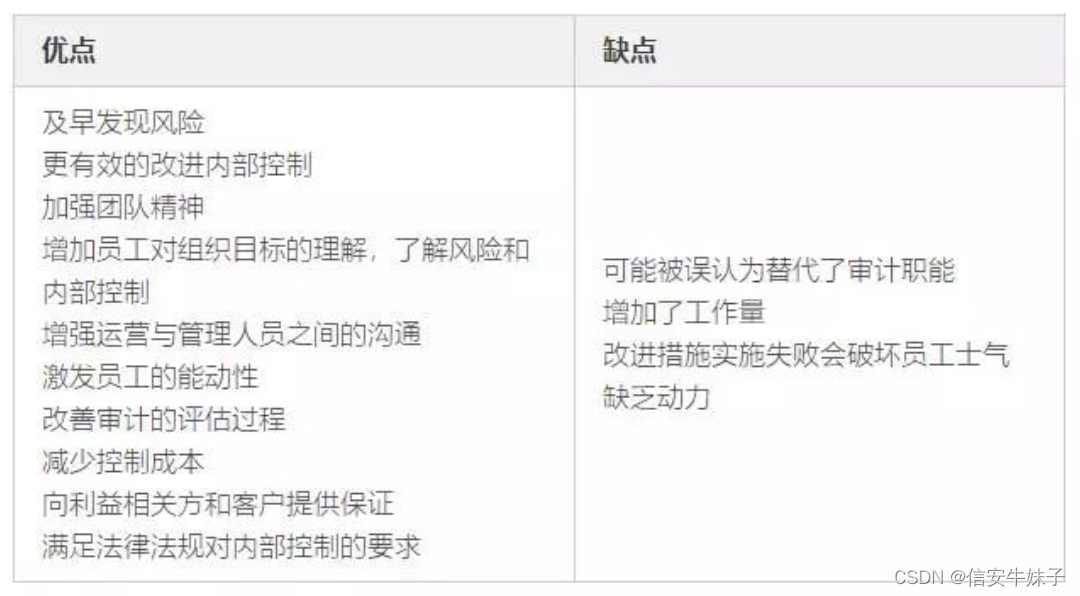
CISA学习笔记-第一章、信息系统审计过程
传统的审计三方关系理论指明,审计作为独立于会计记录之外的一项重要职能,是公司财务信息公允可靠的有力保障,制约着会计行为,制衡了会计权力。 1. IS审计和保障标准、指南、工具 职业道德规范 信息技术保证框架(ITAF&a…...
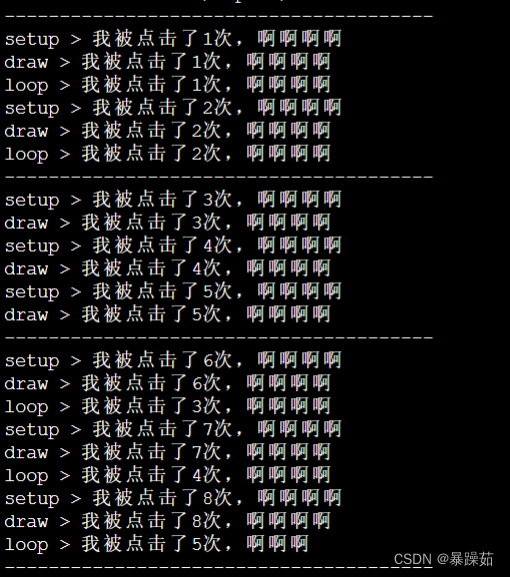
回调函数的使用:案例一:c语言简单信号与槽机制。
系列文章目录 文章目录 系列文章目录前言一、回调函数1.1 回调函数基本概念1.2 简单实现 二、代码案例1.代码示例 总结 前言 了解回调函数的基本概念,函数指针的使用、简单信号与槽的实现机制; 一、回调函数 1.1 回调函数基本概念 回调函数就是一个通…...

python matplotlib库 设置字体字号等
主要是记录字体、字号对应的参数。注意字符串类型的参数要加引号 1.字体: fontname 常见参数: # 常用 Times New Roman、Dejavu sans、TeX Gyre Schola中文字体 黑体:SimHei 微软雅黑:Microsoft YaHei 微软正黑体:M…...
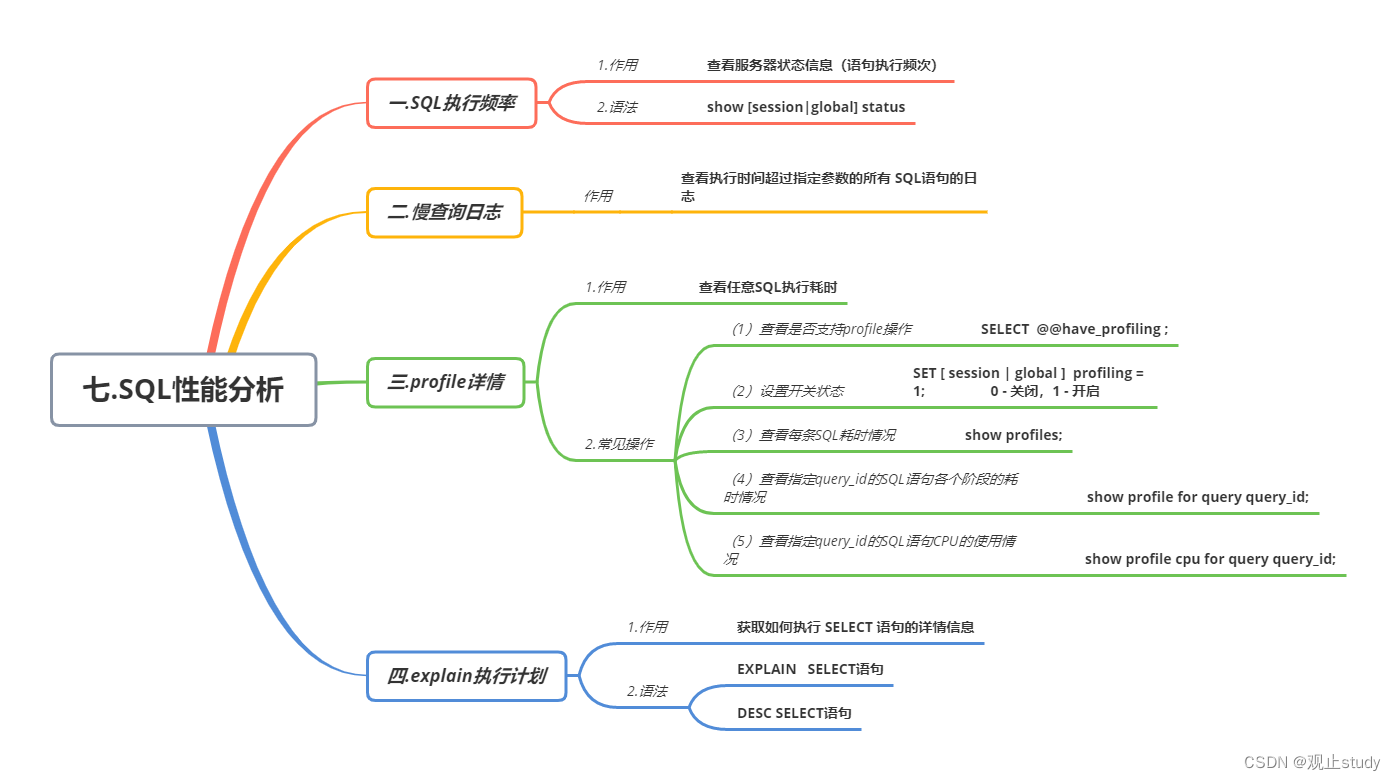
【MySQL】SQL性能分析 (七)
🚗MySQL学习第七站~ 🚩本文已收录至专栏:MySQL通关路 ❤️文末附全文思维导图,感谢各位点赞收藏支持~ 假如我们需要对SQL进行优化,我们就必须对他足够的了解,比如 对哪一类SQL进行优化(增删改查…...

Mirage Flow互联网信息整合应用:智能爬虫与内容摘要生成系统
Mirage Flow互联网信息整合应用:智能爬虫与内容摘要生成系统 每天一睁眼,互联网上的信息就像潮水一样涌来。你想了解某个行业动态,或者追踪一个热点事件,光是打开几十个网页、一篇篇看下来,眼睛都花了,最后…...

VibeVoice语音合成效果展示:印度英语in-Samuel_man技术讲座样例
VibeVoice语音合成效果展示:印度英语in-Samuel_man技术讲座样例 1. 真实语音合成效果体验 今天我要带大家体验一个让人惊艳的语音合成技术——VibeVoice实时语音合成系统。这不是普通的文字转语音工具,而是一个能够生成极其自然、富有表现力的人工智能…...

SpringBoot+MyBatis事务控制实战:从默认行为到精细化手动管理
1. SpringBootMyBatis事务的默认行为解析 第一次在SpringBoot项目中使用MyBatis时,我发现一个有趣的现象:明明没有显式开启事务,数据库操作却自动运行在事务中。后来通过日志分析才明白,这是SpringBoot的默认行为。就像我们去餐厅…...

PHP Monitor自定义配置教程:设置预设、环境变量和应用集成
PHP Monitor自定义配置教程:设置预设、环境变量和应用集成 【免费下载链接】phpmon Lightweight, native Mac menu bar app that helps you manage multiple PHP installations, locate config files and more. Also interacts with Laravel Valet. 项目地址: htt…...

别再花钱买会员了!手把手教你用D-ID AI Studio免费复活老照片,7天试用期全攻略
零成本玩转AI影像修复:D-ID免费额度深度使用指南 老照片承载着无数珍贵回忆,但褪色、折痕让它们逐渐模糊。如今AI技术让这些记忆重获新生——无需付费订阅,你完全可以通过合理规划免费资源完成老照片动画化项目。本文将彻底拆解如何最大化利用…...

BabelDOC终极指南:如何完美翻译PDF学术论文并保持原格式
BabelDOC终极指南:如何完美翻译PDF学术论文并保持原格式 【免费下载链接】BabelDOC Yet Another Document Translator 项目地址: https://gitcode.com/GitHub_Trending/ba/BabelDOC 还在为PDF翻译后格式混乱而烦恼吗?BabelDOC为您提供了一站式解决…...
(可用于备赛蓝桥杯Web应用开发))
零基础快速入门前端蓝桥杯Web应用开发 DOM 核心知识点(适配省赛/国赛高频考点)(可用于备赛蓝桥杯Web应用开发)
DOM 是蓝桥杯 Web 赛道的必考核心,贯穿所有实操编程题,从基础元素获取到复杂交互、性能优化均有覆盖,以下按考点优先级和模块完整梳理,适配历年真题考情。 一、DOM 基础认知与元素获取(所有题的前置基础,1…...

AI Agent交互设计避坑指南:从Manus到Cursor的7个实战技巧
AI Agent交互设计避坑指南:从Manus到Cursor的7个实战技巧 当AI Agent从简单的指令执行者进化为能自主规划、调用工具并修正错误的"数字伙伴"时,交互设计的复杂度呈指数级增长。去年某知名设计团队调研显示,78%的AI产品失败案例源于…...

从软件到硬件:Taalas ASIC如何让AI成为“物理基础设施”
当AI推理速度突破15000 tokens/秒,我们谈论的不再是“更快的服务”,而是“消失的延迟”。过去两年,大模型领域的竞争焦点高度集中在算力堆叠和参数规模上。GPU成为稀缺资源,英伟达H200、B200的发布一次次刷新算力上限,…...
)
新手避坑指南:用Arduino Uno和CNC Shield V3驱动42步进电机(附完整代码与接线图)
新手避坑指南:用Arduino Uno和CNC Shield V3驱动42步进电机(附完整代码与接线图) 刚拿到Arduino Uno和CNC Shield V3时,你可能迫不及待想驱动42步进电机完成第一个项目。但现实往往是:电机纹丝不动、发出奇怪噪音&…...