JTS-Angle角度类
目录:
- 获取AB连线与正北方向的角度
- 求距离此点一定距离、一定夹角的点经纬度
- 判断point点 在线段startPoint-etartPoint的左侧或者右侧
- 米转换为弧度
- 弧度转换为米
定义Point点
public class LatLngPoint {final static double RC = 6378137;final static double RJ = RC;double longitude, latitude;double radLongitude, radLatitude;double Ec;double Ed;static final String LatLngPointString = "%.6f:%.6f";public LatLngPoint(double longitude, double latitude) {this.longitude = longitude;this.latitude = latitude;radLongitude = this.longitude * Math.PI / 180.;radLatitude = this.latitude * Math.PI / 180.;Ec = RJ + (RC - RJ) * (90. - latitude) / 90.;Ed = Ec * Math.cos(radLatitude);}public String getString() {return String.format(LatLngPointString, longitude, latitude);}
}
import com.vividsolutions.jts.algorithm.Angle;
import com.vividsolutions.jts.geom.Coordinate;
import org.locationtech.spatial4j.distance.DistanceUtils;import java.math.BigDecimal;public class LatLngAngleUtil {/*** 获取AB连线与正北方向的角度* * @param startPoint* A点的经纬度* @param endPoint* B点的经纬度* @return AB连线与正北方向的角度(0~360)*/public static double getAngleByTwoPoint(LatLngPoint startPoint, LatLngPoint endPoint) {double dx = (endPoint.radLongitude - startPoint.radLongitude) * startPoint.Ed;double dy = (endPoint.radLatitude - startPoint.radLatitude) * startPoint.Ec;double angle = 0.0;angle = Math.atan(Math.abs(dx / dy)) * 180. / Math.PI;double dLo = endPoint.longitude - startPoint.longitude;double dLa = endPoint.latitude - startPoint.latitude;if (dLo > 0 && dLa <= 0) {angle = (90. - angle) + 90;} else if (dLo <= 0 && dLa < 0) {angle = angle + 180.;} else if (dLo < 0 && dLa >= 0) {angle = (90. - angle) + 270;}return angle;}/*** 求距离此点一定距离、一定夹角的点经纬度* * @param distance* 两点之间的距离 单位 m* @param angle* 两点连线与正北方向的夹角(0~360)* @return 算出的点的经纬度*/public static LatLngPoint getLatLngPointByDistanceAndAngle(LatLngPoint startPoint,double distance, double angle) {double dx = distance * Math.sin(Math.toRadians(angle));double dy = distance * Math.cos(Math.toRadians(angle));double bjd = new BigDecimal((dx / startPoint.Ed + startPoint.radLongitude) * 180. / Math.PI).setScale(7, BigDecimal.ROUND_HALF_UP).doubleValue();double bwd = new BigDecimal((dy / startPoint.Ec + startPoint.radLatitude) * 180. / Math.PI).setScale(7, BigDecimal.ROUND_HALF_UP).doubleValue();return new LatLngPoint(bjd, bwd);}/*** 判断point点 在线段startPoint-etartPoint的左侧或者右侧* @param point 需要判断的点* @param startPoint 线段开始点* @param endPoint 线段结束点* @return 大于0为右侧,小于0为左侧*/public static double isLeftOrRight(Coordinate point, Coordinate startPoint, Coordinate endPoint) {double angleLeft = Angle.angleBetweenOriented(point,startPoint,endPoint);return angleLeft;}/*** 米转换为弧度* 弧度=角度*PI/180* 弧长=半径*弧度* 地球赤道半径=6378137* @param me* @return*/public static double meToDegree(double me){double radius = DistanceUtils.EARTH_MEAN_RADIUS_KM; //地球平均半径BigDecimal bigDecimalCm = new BigDecimal(me);BigDecimal bigDecimalFM = new BigDecimal(1000);double bufferDegree = bigDecimalCm.divide(bigDecimalFM).doubleValue();double kmToDegree = DistanceUtils.dist2Degrees(bufferDegree, radius);return kmToDegree;}/*** 弧度转换为米* 弧度=角度*PI/180* 弧长=半径*弧度* 地球赤道半径=6378137* @param degree* @return*/public static double degreeToMe(double degree){return DistanceUtils.degrees2Dist(degree, DistanceUtils.EARTH_MEAN_RADIUS_KM) * 1000;}
相关文章:

JTS-Angle角度类
目录: 获取AB连线与正北方向的角度求距离此点一定距离、一定夹角的点经纬度判断point点 在线段startPoint-etartPoint的左侧或者右侧米转换为弧度弧度转换为米 定义Point点 public class LatLngPoint {final static double RC 6378137;final static double RJ …...
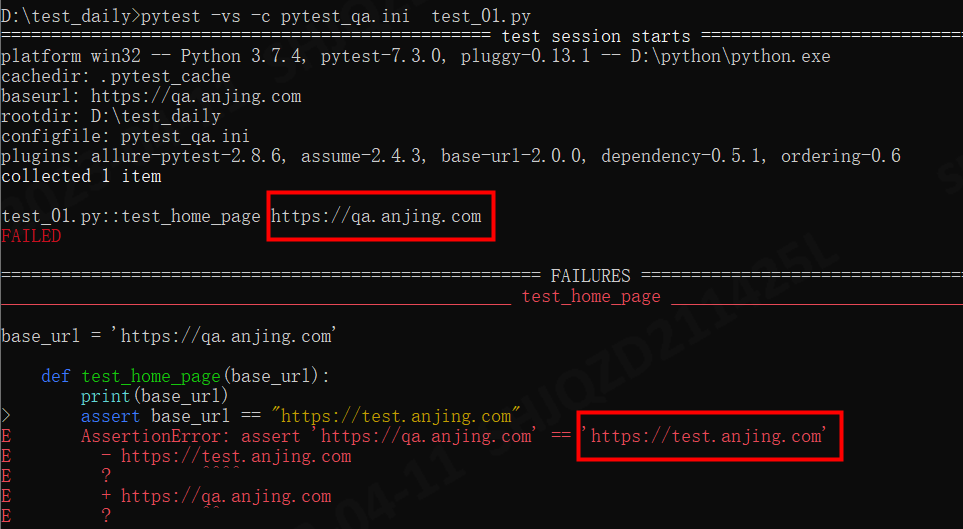
pytest---环境切换(base-url)
前言 前面小编介绍了如何通过pytest的插件来实现自动化测试的环境的切换,当时使用的方法是通过钩子函数进行获取命令行参数值,然后通过提前配置好的参数进行切换测试环境地址,今天小编再次介绍一种方法,通过pytest的插件ÿ…...
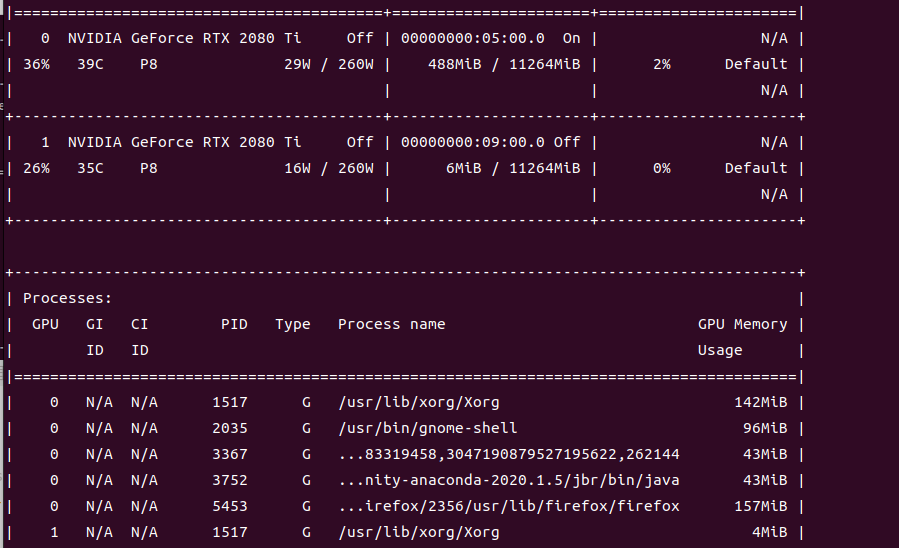
linux跑代码,程序终止了,但资源没有释放。
linux跑代码,程序终止了,但资源没有释放。 程序终止,但是资源没有释放. kill -9 5062完成。 linux终止进程...
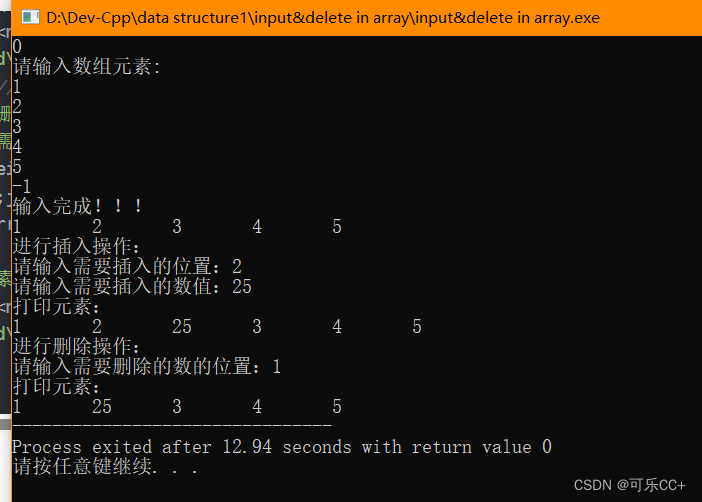
数据结构--线性表2-1
目录 一、线性结构的定义 二、线性表的表示 三、顺序表的实现(或操作) 1、修改: 2、插入: 四、顺序表的运算效率分析:时间效率分析: 一、线性结构的定义 若结构时非空有限集,则有且仅有一个…...
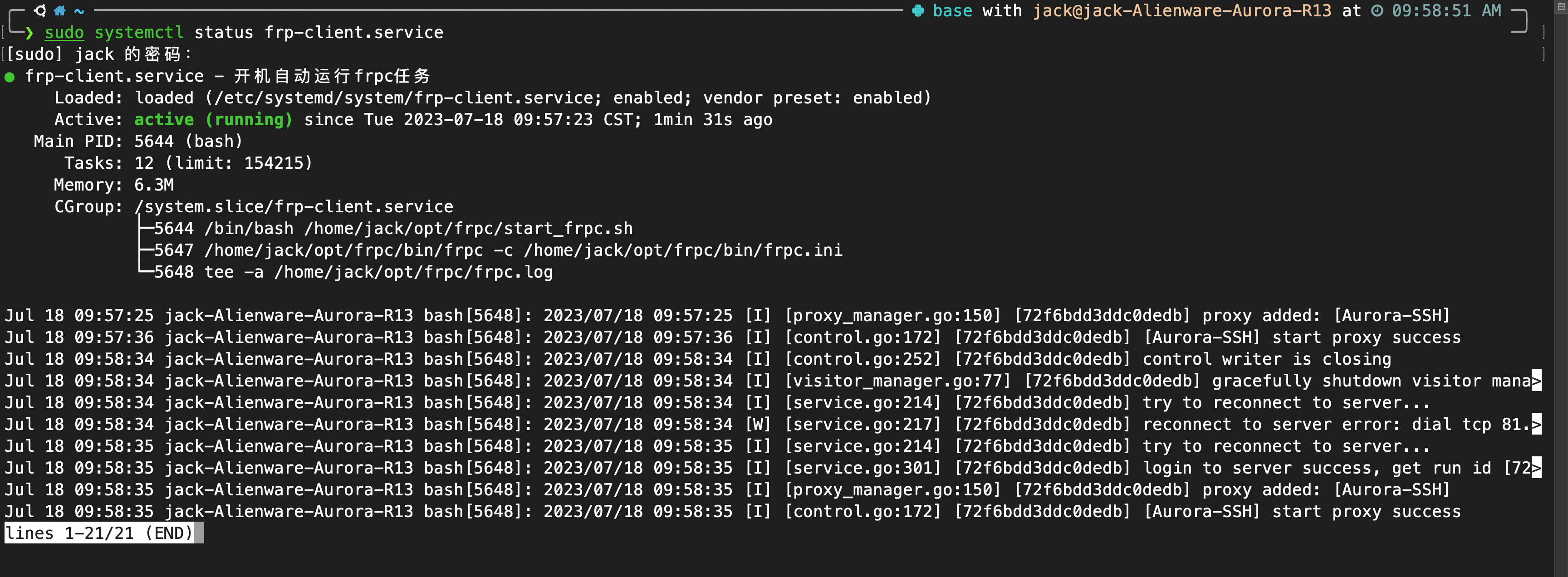
网访问内网机器:基于frp的内网穿透
随缘更新些我自己的博客网站里的文章吧 因为经常需要远程访问自己的机器,所以写一个博客记录一下 公网访问内网机器:基于frp的内网穿透 从公网中访问自己的私有设备向来是一件难事儿。 1. 为什么需要内网穿透? A. 计算机网络 如何在自己的机…...
【Spring框架】Spring读取与存储综合练习
练习 在 Spring 项⽬中,通过 main ⽅法获取到 Controller 类,调⽤ Controller ⾥⾯通过注⼊的⽅式调⽤ Service 类,Service 再通过注⼊的⽅式获取到 Repository 类,Repository 类⾥⾯有⼀个⽅法构建⼀个 User 对象,返…...
Python实现指定区域桌面变化监控并报警
在这篇博客中,我们将使用Python编程语言和一些常用的库来实现一个简单的区域监控和变化报警系统。我们将使用Tkinter库创建一个图形界面,允许用户选择监控区域,并使用OpenCV库进行图像处理和相似性比较,以检测区域内的变化&#x…...
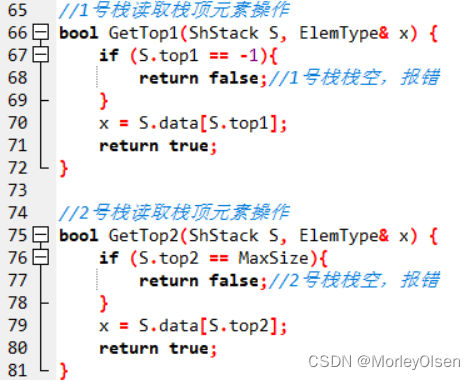
【数据结构】实验五:栈
实验五 栈 一、实验目的与要求 1)熟悉栈的类型定义和基本操作; 2)灵活应用栈解决具体应用问题。 二、实验内容 1、判断回文数,回文是指正读反读均相同的字符序列,如“1221”和“12321”均是回文,但“…...

⚡️⚡️Java多线程编程的高效、安全实践
⚡️ Java多线程编程的高效、安全实践⚡️ ☀️ 1 摘要☀️2 多线程编程基础☀️ 3 线程同步与互斥☀️ 4 并发集合类与原子操作☀️ 5 线程池与执行器框架☀️ 6 并发编程的最佳实践🌄 7 总结 博主 默语带您 Go to New World. ✍ 个人主页—— 默语 的博客…...
【云原生】Docker私有仓库registry
目录 1)用docker容器运行registry私有仓库服务。 2)运行私有仓库服务 3)镜像重命名(要上传的镜像名需要注明私仓的ip) 4)编辑docker配置文件(因为默认是拉取docker官方的镜像,需要重新指定) 5)其他dock…...
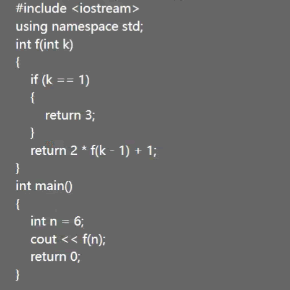
第十四届蓝桥杯大赛青少年省赛C++组试题真题 2023年5月
一、选择题 第 1 题 单选题 C中,bool类型的变量占用字节数为 ( )。 A. 1 B. 2 C. 3 D. 4 第 2 题 单选题 以下关于C结构体的说法,正确的是 ( )。 A. 结构体中只能包含成员变量,不能包含成员函数 B. 结构体不能从另一个结构体继承 …...

GAN论文精读
标题:Generative Adversarial Nets 摘要: 简写:作者提出了一个framework通过一个对抗的过程,在这里面会同时训练两个模型。 第一个模型为生成模型G,是用来抓住整个数据的分布 第二个模型为辨别模型D,是用来估计一个样本是否从G中产生。 …...
)
数据结构:计数排序(详解)
思路详解: 1 找到数组中的最大值、最小值 2 开辟一个统计每个数据出现次数的数组(总个数是最大值-最小值1,因为下标范围是0~最大值-最小值,闭区间统计个数要1) 3 遇到一个元素,在此元素-最小值作为下标的…...

1 请使用js、css、html技术实现以下页面,表格内容根据查询条件动态变化。
1.1 创建css文件,用于编辑style 注意: 1.背景颜色用ppt的取色器来获取: 先点击ppt的形状轮廓,然后点击取色器,吸颜色,然后再点击形状轮廓的其他轮廓颜色,即可获取到对应颜色。 2.表格间的灰色线…...

react-native项目安卓版本升级 compileSdkVersion 29->31
因为 react-native-ble-manager添加过程及碰到的问题 依赖 https://github.com/innoveit/react-native-ble-manager 参考:https://blog.csdn.net/withings/article/details/71378562 iOS 按react-native-ble-manager 文档在 【Info.plist】加了key之后能正常使用…...
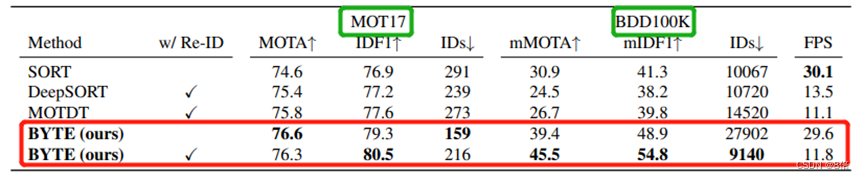
【学习笔记】目标跟踪领域SOTA方法比较
目录 前言方法1 TraDeS:2 FairMOT:3 SMILEtrack:4 ByteTrack: 前言 常用于行人跟踪的多目标跟踪数据集包括:MOT 15/16/17/20、PersonPath22等… 为更好比较现有SOTA算法的检测性能,本博客将针对在各数据集上表现较优的算法模型进行介绍。(表…...

机器学习 深度学习编程笔记
sigmoid函数 def sigmoid(x):return 1.0 / (1np.exp((-x)))定义最小平方和损失函数 loss torch.nn.MSELoss()线性回归编程 如果不加噪音就成了正常的线性函数了,所以要加噪音。 torch.normal(0, 0.01, y.shape)torch.normal(0, 0.01, y.shape)是一个用于生成服从…...

18.背景轮播
背景轮播 html部分 <div class"container"><div class"slide active" style"background-image: url(./static/20180529205331_yhGyf.jpeg);"></div><div class"slide " style"background-image: url(./s…...
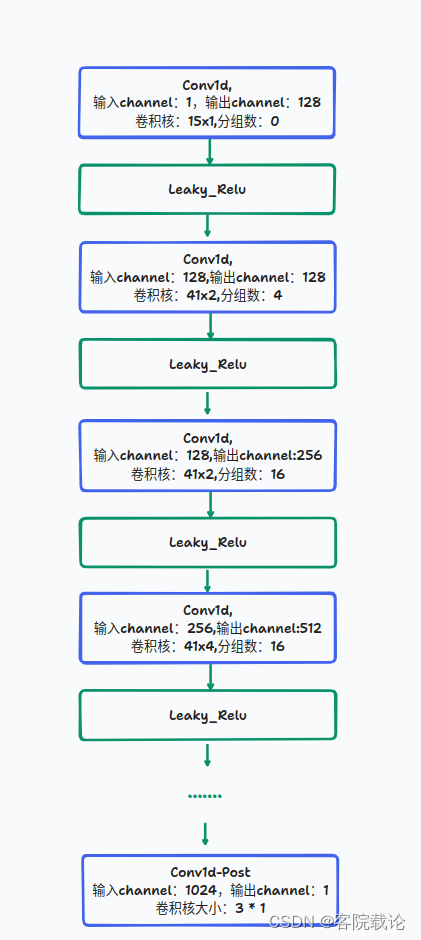
论文代码学习—HiFi-GAN(2)——鉴别器discriminator代码
文章目录 引言正文鉴别器多周期鉴定器多尺度鉴定器问题 总结 引言 这里翻译了HiFi-GAN这篇论文的具体内容,具体链接。这篇文章还是学到了很多东西,从整体上说,学到了生成对抗网络的构建思路,包括生成器和鉴定器。细化到具体实现的…...
 grep命令】)
Linux Shell 脚本编程学习之【第3章 正则表达式 (第二部分) grep命令】
第3章 正则表达式 (第二部分) 4 grep命令4.1 基本用法4.2 参考命令4.2.1 双引号4.2.2 -c 输出匹配行数4.2.3 -h 或 -l 不显示或只显示文件名4.2.4 -s 不显示错误信息4.2.5 -r 递归显示本级目录及下级目录4.2.6 -w 匹配完整词 -x 匹配完整行4.2.7 -q 退出…...

FCEUX终极指南:从怀旧游戏到专业调试的完整NES模拟器教程
FCEUX终极指南:从怀旧游戏到专业调试的完整NES模拟器教程 【免费下载链接】fceux FCEUX, a NES Emulator 项目地址: https://gitcode.com/gh_mirrors/fc/fceux FCEUX是一款功能强大的开源NES模拟器,让你在现代电脑上完美重温经典红白机游戏。无论…...

【DeepSeek-R1代码相似度引擎解密】:3层语义比对机制、Token归一化偏差修正与Jaccard阈值黄金分割点
更多请点击: https://kaifayun.com 第一章:DeepSeek代码重复检测 DeepSeek-R1 模型在训练过程中引入了严格的代码去重机制,其核心目标是消除训练语料中语义等价或高度相似的代码片段,从而提升模型对真实编程模式的学习能力与泛化…...

光效崩坏?噪点泛滥?色温漂移?——Midjourney专业级光效渲染全流程校准协议,含ACEScg色彩空间适配模板
更多请点击: https://kaifayun.com 第一章:光效崩坏、噪点泛滥与色温漂移的系统性归因诊断 图像采集链路中出现的光效崩坏、噪点泛滥与色温漂移并非孤立现象,而是光学设计、传感器响应、ISP管线调度及环境耦合失配共同作用的结果。三者常呈现…...

Scroll Reverser:让Mac的多设备滚动体验回归直觉的免费神器
Scroll Reverser:让Mac的多设备滚动体验回归直觉的免费神器 【免费下载链接】Scroll-Reverser Per-device scrolling prefs on macOS. 项目地址: https://gitcode.com/gh_mirrors/sc/Scroll-Reverser 你是否曾经在MacBook的触控板和鼠标之间切换时࿰…...

基于Arduino的智能蓝调节拍器:DIY音乐练习伴侣
1. 项目概述:一个能“演奏”蓝调的低成本节拍器玩乐器的人,对节拍器这东西又爱又恨。它像一位严厉的监工,用单调的“嘀嗒”声强迫你跟上节奏。但你想过没有,这个监工其实可以很有趣?几年前,我在练习蓝调吉他…...

MySQL GROUP BY 原理与优化
我刚工作的时候,有次统计每个用户的订单总金额,写了 SELECT user_id, SUM(amount) FROM orders GROUP BY user_id,结果执行了 60 秒还没出结果。DBA 帮我一看执行计划,发现没走索引,导致 Using temporary(用…...

WarcraftHelper:魔兽争霸III现代兼容性问题的终极解决方案指南
WarcraftHelper:魔兽争霸III现代兼容性问题的终极解决方案指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 魔兽争霸III作为经典即时战…...
)
大佬推荐的网络安全学习路线(从基础到高级,超级详细)
大佬推荐的网络安全学习路线(从基础到高级,超级详细) 说起网络安全,你可能会担心它是一个过时的行业。有人说,网络安全快卷死了,你既要攻又要防,并且随着技术的发展,你还要不断地学…...

论文写作效率翻倍?okbiye 毕业论文 AI 功能全解析:从需求到终稿的规范路径
okbiye-免费查重复率aigc检测/开题报告/毕业论文/智能排版/文献综述/AI PPT毕业论文 - Okbiye智能写作https://www.okbiye.com/ai/bylw 一、从界面看本质:okbiye 毕业论文 AI 写作的设计逻辑 打开 okbiye 的毕业论文 AI 写作页面,首先能感受到的是清晰的…...

基于MAX78000的离线鸟类声音识别:边缘AI从数据到部署全流程解析
1. 项目概述:当边缘AI“听懂”鸟鸣在野外生态监测或自家后院观鸟时,你是否有过这样的经历:听到一阵清脆或婉转的鸟鸣,却完全不知道是哪位“歌唱家”在表演?传统的鸟类识别依赖专家经验和图鉴比对,不仅门槛高…...