浙江大学第六周数据结构之06-图1 列出连通集
题目详情:
给定一个有N个顶点和E条边的无向图,请用DFS和BFS分别列出其所有的连通集。假设顶点从0到N−1编号。进行搜索时,假设我们总是从编号最小的顶点出发,按编号递增的顺序访问邻接点。
输入格式:
输入第1行给出2个整数N(0<N≤10)和E,分别是图的顶点数和边数。随后E行,每行给出一条边的两个端点。每行中的数字之间用1空格分隔。
输出格式:
按照"{ v1 v2 ... vk }"的格式,每行输出一个连通集。先输出DFS的结果,再输出BFS的结果。
输入样例:
8 6
0 7
0 1
2 0
4 1
2 4
3 5
输出样例:
{ 0 1 4 2 7 }
{ 3 5 }
{ 6 }
{ 0 1 2 7 4 }
{ 3 5 }
{ 6 }主要思路:
三个重要模块:
(一)图的存储
这次尝试的是用二维邻接矩阵,以后有机会尝试一位邻接矩阵和邻接表
二维邻接矩阵关键四步:
(1)定义图的数据结构,分为图节点与边节点两部分
/*图节点*/
typedef struct GraphNode* PToGraphNode;
struct GraphNode {int VertexNums;int EdgeNums;int WeightBetweenTwoEdge[MAX_SIZE][MAX_SIZE];
};
typedef PToGraphNode MatrixGraph;
/*边界点*/
typedef struct EdgeNode* PToEdgeNode;
struct EdgeNode {int Start, End;int Weight;
};
typedef PToEdgeNode Edge;(2)创建一个没有边的图
MatrixGraph CreateGraph() {int vertixNums;scanf("%d", &vertixNums);MatrixGraph Graph = (MatrixGraph)malloc(sizeof(struct GraphNode));Graph -> VertexNums = vertixNums;Graph -> EdgeNums = 0;for(int i = 0; i < (Graph -> VertexNums); i++) {for(int j = 0; j < (Graph -> VertexNums); j++) {Graph -> WeightBetweenTwoEdge[i][j] = 0;}}return Graph;
}(3)插入边
void InsertEdge(MatrixGraph graph, Edge edge) {graph -> WeightBetweenTwoEdge[edge -> Start][edge -> End] = edge -> Weight;graph -> WeightBetweenTwoEdge[edge -> End][edge -> Start] = edge -> Weight;
}(4)创建图
MatrixGraph BuildGraph() {MatrixGraph graph = CreateGraph();scanf("%d", &(graph -> EdgeNums));if((graph -> EdgeNums) != 0) {for(int i = 0; i < (graph -> EdgeNums); i++) {Edge edge = (Edge)malloc(sizeof(struct EdgeNode));scanf("%d %d", &(edge -> Start), &(edge -> End));edge -> Weight = WEIGHT; InsertEdge(graph, edge); }}return graph;
}
(二)DFS的实现(记忆:DFS的D谐音递归)
DFS是通过递归找到一条一条路径
关于图的DFS 有常规思路如下:
void DFS(u) {vis[u] = true; // 设置为已访问Visit[u] //访问节点for(从u出发能达到的所有顶点v) // 枚举从u出发可以到达的所有顶点if vis[v] == false // 没有被访问DFS(v) // 递归访问
}void DFSTravel(G) {for(G所有顶点u) if vis[u] == falseDFS(u)
}(三)BFS的实现
BFS就是广义化的层序遍历
BFS常规思路
void BFS(int u) {queue q;q.push(u);inq[u] = true; // 设置 u 已经入队while(!q.empty()) {Visit[q.front()] //取出队首元素进行访问for(从u出发可到达所有顶点v)if(inq[v] == false)将 v 入队inq[v] = true}
}void BFSTravel() {for(G所有顶点u) {if(inq[u] == false)BFS(u)}
}无论是BFS还是DFS,一层循环找到的都是一个图里面的连通集
BFS和DFS里面设置的Vis数组用于记录当前元素是否访问过,如果访问过,说明该元素已经存在于之前建立的一个连通集中了
代码实现:
/*
利用二维邻接矩阵创建图
(1)定义图的数据结构,分为图节点与边节点两部分
(2)定义创建一个没有边的图的函数
(3)定义插入边的函数
(4)定义创建图的函数
*/
#include <stdio.h>
#include <stdlib.h>
#define MAX_SIZE 11
#define WEIGHT 1
#define TRUE 1
#define FALSE 0
#define NONE -1
/*定义图的数据结构*/
typedef struct MartixGraphNode MartixGraphNode;
typedef MartixGraphNode* MatrixGraph;
struct MartixGraphNode {int VertexNums;int EdgeNums;int Weight[MAX_SIZE][MAX_SIZE];
};
/*定义边的数据结构*/
struct EdgeNode{int Start, End;int Weight;
};
/*创建一个空的图*/
MatrixGraph CreateEmptyGraph(int vertexNums) {MatrixGraph graph = (MatrixGraph)malloc(sizeof(MartixGraphNode));graph->VertexNums = vertexNums;graph->EdgeNums = 0;for(int i = 0; i < vertexNums; i++) {for(int j = 0; j < vertexNums; j++) {graph->Weight[i][j] = 0;}}return graph;
}
/*插入边*/
void InsertEdge(MatrixGraph graph, int start, int end, int weight) {graph->Weight[start][end] = weight;graph->Weight[end][start] = weight;return;
}
/*建立图*/
MatrixGraph BuildGraph(int vertexNums, int edgeNums) {MatrixGraph graph = CreateEmptyGraph(vertexNums);graph->VertexNums = vertexNums;graph->EdgeNums = edgeNums;for(int i = 0; i < edgeNums; i++) {int start, end;scanf("%d %d", &start, &end);InsertEdge(graph, start, end, WEIGHT);}return graph;
}
/*DFS*/
int Vis[MAX_SIZE];
void DFS(MatrixGraph graph, int index) {Vis[index] = TRUE;printf("%d ", index);for(int i = 0; i < (graph->VertexNums); i++) {if(Vis[i] == FALSE && graph->Weight[i][index] == WEIGHT) {DFS(graph, i);}}return;
}
void Erase() {for(int i = 0; i < MAX_SIZE; i++) {Vis[i] = FALSE;}return;
}
/*队列的数据结构*/
typedef struct QueueNode QueueNode;
typedef QueueNode* Queue;
struct QueueNode {int Data[MAX_SIZE];int Size;int head, rear;
};
void Init(Queue* q) {(*q)->Size = 0;(*q)->head = 0;(*q)->rear = -1;for(int i = 0; i < MAX_SIZE; i++) {(*q)->Data[i] = NONE;}return;
}
int IsFull(Queue* q) {if((*q)->Size == MAX_SIZE) {return TRUE;}else {return FALSE;}
}
int IsEmpty(Queue* q) {if((*q)->Size == 0) {return TRUE;}else {return FALSE;}
}
int Dequeue(Queue* q) {if(IsEmpty(q)) { return;}int front = (*q)->Data[(*q)->head++ % MAX_SIZE];if((*q)->head > 0) {(*q)->Data[(*q)->head - 1] = NONE;}(*q)->Size--; return front;
}
void Enqueue(Queue* q, int data) {if(IsFull(q)) {return;}(*q)->Data[++(*q)->rear % MAX_SIZE] = data;(*q)->Size++;return;
}
void BFS(MatrixGraph graph, int index) {Queue q = (Queue)malloc(sizeof(QueueNode));Init(&q);Enqueue(&q, index);Vis[index] = TRUE;while(!IsEmpty(&q)) {int index = Dequeue(&q);printf("%d ", index);for(int i = 0; i < graph->VertexNums; i++) {if(graph->Weight[i][index] == WEIGHT && Vis[i] == FALSE) {Vis[i] = TRUE;Enqueue(&q, i);}}}
}
int main() {int vertexNums, edgeNums;scanf("%d %d", &vertexNums, &edgeNums);MatrixGraph graph = BuildGraph(vertexNums, edgeNums);/*DFS*/ for(int i = 0; i < vertexNums; i++) {if(Vis[i] == FALSE) {printf("{ ");DFS(graph, i);printf("}\n");}}Erase();for(int i = 0; i < vertexNums; i++) {if(Vis[i] == 0) {printf("{ ");BFS(graph, i);printf("}\n");}}return 0;
}相关文章:

浙江大学第六周数据结构之06-图1 列出连通集
题目详情: 给定一个有N个顶点和E条边的无向图,请用DFS和BFS分别列出其所有的连通集。假设顶点从0到N−1编号。进行搜索时,假设我们总是从编号最小的顶点出发,按编号递增的顺序访问邻接点。 输入格式: 输入第1行给出2个整数N(0&…...

DNS缓存病毒防护43.227.220
DNS缓存病毒又称DNS欺骗,是一种通过查找并利用DNS系统中存在的漏洞,将流量从合法服务器引导至虚假服务器上的攻击方式。 在实际的DNS解析过程中,用户请求某个网站,浏览器首先会查找本机中的DNS缓存,如果DNS缓存中记录…...

Spring MVC -- 返回数据(静态页面+非静态页面+JSON对象+请求转发与请求重定向)
目录 1. 返回静态页面 2. 返回非静态页面 2.1 ResponseBody 返回页面内容 2.2 RestController ResponseBody Controller 2.3 示例:实现简单计算的功能 3. 返回JSON对象 3.1 实现登录功能,返回 JSON 对象 4. 请求转发(forward)或请求重定向(redirect) 4.1 请…...
)
k8s集群部署(使用kubeadm部署工具进行快速部署,相关对应版本为docker20.10.0+k8s1.23.0)
1. 安装要求 在开始之前,部署Kubernetes集群机器需要满足以下几个条件: 一台或多台机器,操作系统 CentOS7.x-86_x64硬件配置:2GB或更多RAM,2个CPU或更多CPU,硬盘20GB或更多可以访问外网,需要拉…...

SIP视频对讲sip广播网关
SV-PA2是专门对行业用户需求研发的一款SIP音视频对讲,媒体流传输采用标准IP/RTP/RTSP协议。它很好的继承了锐科达话机稳定性好、电信级音质的优点,且完美兼容当下所有基于SIP的主流IPPBX/软交换/IMS平台,如Asterisk, Broadsoft, 3CX, Elastix 等。它集多…...
prometheus直方图实践
目录 1.简介 2.方案 1.简介 Prometheus提供了Counter、Gauge、Histogram、Summary四类指标(详见Metric types | Prometheus),可以通过"github.com/prometheus/client_golang/prometheus"自定义采集指标、注册、采集数据、发布UR…...

【C语言进阶篇】指针都学完了吧!那回调函数的应用我不允许还有人不会!
🎬 鸽芷咕:个人主页 🔥 个人专栏:《C语言初阶篇》 《C语言进阶篇》 ⛺️生活的理想,就是为了理想的生活! 文章目录 📋 前言💬 函数指针数组💭 函数指针数组的定义💭 函数指针数组的…...
专注:如何提高专注力和注意力的简要指南
专注力和集中力可能很难掌控的很好。大多数人都想学习如何提高注意力和注意力。但真的做到了?我们生活在一个嘈杂的世界里,不断的分心会使注意力难以集中。 此指南包含有关如何获得并保持专注的研究。我们将分解提升您的思维并关注重要事物背后的理论依…...
Linux查看内存的几种方法
PS的拼接方法 ps aux|head -1;ps aux|grep -v PID|sort -rn -k 4|head 进程的 status 比如说你要查看的进程pid是33123 cat /proc/33123/status VmRSS: 表示占用的物理内存 top PID:进程的ID USER:进程所有者 PR:进程的优先级别&#x…...
selenium定位rect元素
rect元素属性 rect元素的属性如下: x:此属性确定矩形的x坐标。 值类型:| ; 默认值:0 动画:是y:此属性确定矩形的y坐标。 值类型:| ; 默认值:0 动画:是width:…...

uniapp <textarea>组件的踩坑
1、ios真机上,textarea输入时会触发页面其他点击事件, 解决方法:把textarea封装成基础组件,绕过这个bug。 2、使用auto-height属性,安卓真机上,会导致textarea高度异常, 官方人员解释…...

README.md 文档使用 treer 生成树形项目结构
一、前言 前后端编写 README.md 文档的时候,常常需要描写项目的结构,使用 tree 命令生成的目录又不能忽略某个目录,不方便。后来我找到了可以忽略某些目录的 treer命令 ,特此记录一下: 二、使用 treer 生成项目结构 全局安装tr…...

朝花夕拾思维导图怎么画?看看这种绘制方法
朝花夕拾思维导图怎么画?绘制思维导图的好处有很多,首先它可以帮助人们更好地组织和管理知识,提高工作效率和学习效果。其次,绘制思维导图可以帮助人们更好地记忆知识点和理解知识点。总之,绘制思维导图可以帮助人们更…...

Python - OpenCV、OCR识别摄像头中的文字
使用Python3的OpenCV库来识别摄像头中的文字,以及使用OCR(光学字符识别)技术。 安装OpenCV库 在命令行中输入以下命令来安装OpenCV库: pip install opencv-python安装Tesseract OCR库 Tesseract OCR库是一种免费的光学字符识别…...
金融中的数学:贝叶斯公式
1.贝叶斯定理 贝叶斯定理是概率论中的一项重要定理,用于在已知某一事件的条件下,求另一事件发生的概率。它是根据条件概率推导出来的,得名于英国数学家托马斯贝叶斯。 贝叶斯定理可以表示为: 这个式子就是贝叶斯公式,…...
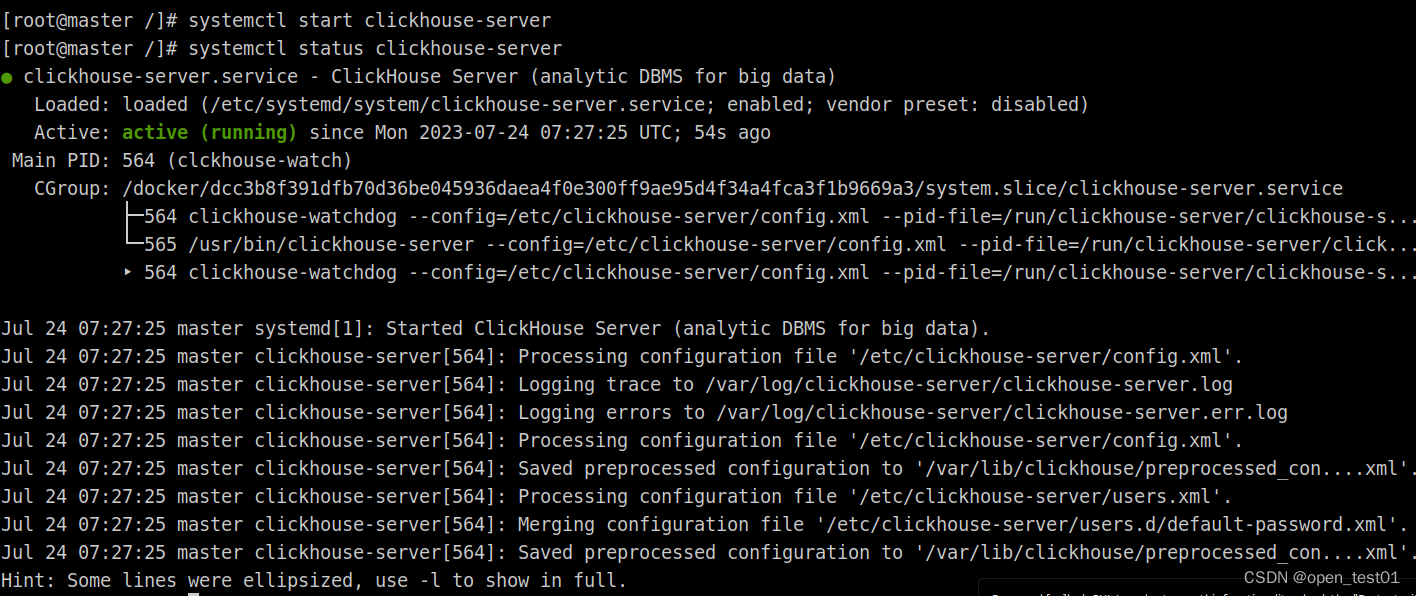
ClickHouse单节点安装配置
四个安装包: 创建clickhouse目录 将安装包解压到该目录 tar -zxvf clickhouse-server-21.9.4.35.tgz -C /opt/module/clickhouse tar -zxvf clickhouse-common-static-21.9.4.35.tgz -C /opt/module/clickhouse tar -zxvf clickhouse-common-static-dbg-21.9.4.35.…...
AtcoderABC231场
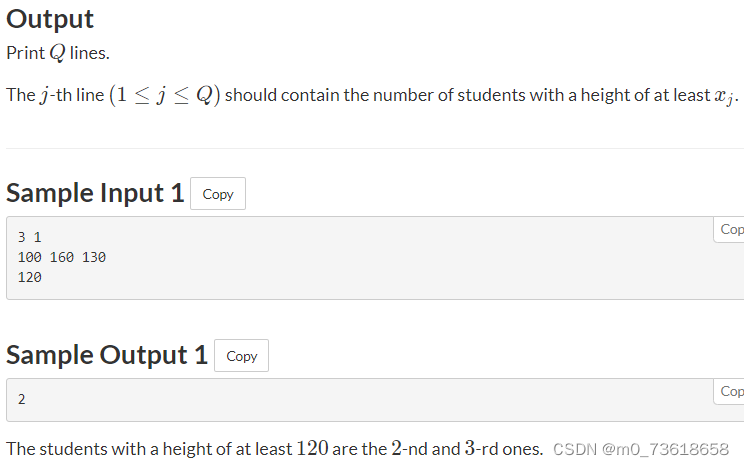
A - Water PressureA - Water Pressure 题目大意 假设水压仅取决于深度,在深度为x米时,水压为x/100兆帕斯卡。 现在给定一个深度D米,需要计算在该深度下的水压是多少兆帕斯卡。 思路分析 直接将输入的深度除以100得到水压结果。 时间复杂…...

opengauss数据库快速安装
root执行 groupadd gs useradd -g gs gs passwd gs mkdir -p /opt/software/openGauss sudo chown gs:gs /opt/software/openGauss chmod 700 /opt/software/openGauss gs执行 上传文件到/home/gs目录下 tar -jxf openGauss-x.x.x-openEuler-64bit.tar.bz2 -C /opt/software/o…...

前端中的LocalStorage和SessionStorage
在前端开发中,常常需要在浏览器端保存数据,以便在页面刷新或跳转时能够保留数据或状态。在这种情况下,可以使用Web Storage API中的LocalStorage和SessionStorage来实现数据的存储。它们都是HTML5提供的本地存储解决方案,可以在浏…...
论文工具——写论文好用的绘图工具(甘特图+流程图+网络模型图+泳道图)
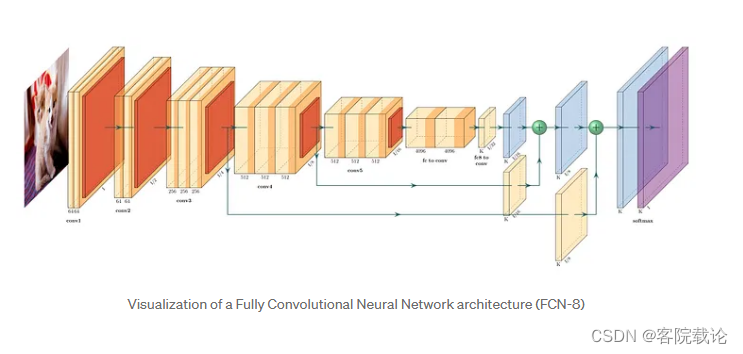
文章目录 引言正文手动画图的在线画图工具tldraw开源免费ProcessOnDraw.io 网络模型图工具NN-SVG设置参数自动生成Netron上传模型自动生成PlotNeuralNet编码生成 总结 引言 在写HiFi-GAN论文的代码阅读过程中,我发现仅仅通过文字来描述网络结构,不够详细…...

Jetson Orin Nano 升级jetpack5.1.2刷机过程记录
一.刷机起因 orin nano 接了个IMX477的摄像头,用 命令行DISPLAY:0.0 nvgstcapture-1.0 显示的画面有撕裂,让卖家查问题,卖家测试没有撕裂,对比环境,orin nano出厂默认的是jetpack5.1.1,卖家用的jetpack5.1.2版本,为了解决差异,要升级jetpack版本,前后搞了2天半,记录一下. 另外…...

Ventoy终极指南:一个U盘启动所有系统,告别重复格式化烦恼 [特殊字符]
Ventoy终极指南:一个U盘启动所有系统,告别重复格式化烦恼 😎 【免费下载链接】Ventoy A new bootable USB solution. 项目地址: https://gitcode.com/GitHub_Trending/ve/Ventoy 还在为每次安装系统都要重新制作启动盘而烦恼吗&#x…...

Allegro等长设置翻车实录:拓扑模板法的3个坑与手工PinPair的救赎
Allegro等长设计避坑指南:从拓扑模板到精准PinPair的实战演进在高速PCB设计中,等长匹配如同精密钟表里的齿轮啮合,差之毫厘便可能导致整个系统时序崩塌。当设计从简单的点对点结构升级到多负载复杂拓扑时,Allegro用户常陷入两种典…...

PA100K数据集实战:从下载到结构化解析全流程
1. PA100K数据集初探:为什么选择它?如果你正在研究行人属性识别,PA100K绝对是个绕不开的宝藏数据集。这个数据集包含了10万张真实监控场景下的行人图像,每张图都标注了26种常见属性——从衣着风格(比如是否穿T恤、裙子…...
两两交换链表中的节点)
力扣HOT100(30)两两交换链表中的节点
链表的交换要注意 “链表不断链”。前驱和后继都要连着迭代法(必学死磕!O (n) 时间,O (1) 空间)1. 为什么必须用虚拟头节点?因为交换后链表的头节点会变! 比如示例 1 中,原来的头是 1࿰…...

基于ESP32的智能电池充电器设计:多化学体系支持与模块化架构
1. 项目概述:打造一台全能的“电池医生”手头攒了一堆不同化学体系的电池,从航模用的4S锂聚合物电池,到应急灯里的12V铅酸电池,再到各种工具里的镍氢、锂离子电池,每次充电都得翻出好几个不同的充电器,桌面…...

Windows文件夹共享
目标:同一局域网实现在一台计算机上共享文件夹,在另一台电脑访问一、电脑A 1.点击要共享的文件夹 -> 属性 -> 共享2.添加Everyone用户组3.控制面板中网络共享关闭密码保存,在访问时不用输入账号密码。二、电脑B 1.在文件资源管理器路径…...

电信运营商每月处理海量工单,如何不再出错?基于AI Agent的端到端自动化解决方案
在2026年的电信行业,海量工单处理已不再仅仅是效率问题,而是合规与生存的底线。随着2026年5月20日《电信和互联网服务 基础电信企业网上营业厅服务规范》国家标准的正式实施,监管层对“信息透明、流程闭环、计费精准”的要求达到了前所未有的…...

03 - 变量与数据类型
03 - 变量与数据类型 变量是编程里最基础的概念,相当于你往电脑里存东西的"容器"。这章我们把变量的命名规则、Python 的几种基本数据类型都过一遍。 变量是什么 说白了,变量就是一个有名字的盒子。你往里面放个东西,以后想用这个…...

NanaZip:现代Windows文件压缩问题的终极解决方案
NanaZip:现代Windows文件压缩问题的终极解决方案 【免费下载链接】NanaZip The 7-Zip derivative intended for the modern Windows experience 项目地址: https://gitcode.com/gh_mirrors/na/NanaZip 还在为Windows文件压缩工具界面老旧、功能单一而烦恼吗&…...