RocketMQ集群4.9.2升级4.9.6版本
本文主要记录生产环境短暂停机升级RocketMQ版本的过程
一、整体思路
1.将生产环境MQ4.9.2集群同步到测试环境,并启动,确保正常运行。
2.参照4.9.2配置4.9.6集群
3.停掉4.9.2集群,启动4.9.6集群,测试确保正常运行。
4.停掉4.9.6集群,复制4.9.2集群的store存储文件夹到4.9.6,再次启动观察有无异常,Topic及历史消息是否可以正常查询和使用。
5.停掉4.9.6集群,再启动4.9.2集群,确保两个版本的集群都正常可用,无异常,目的是保证都可用,再生产机器升级遇到问题时可以及时切回老版本,不至于长时间停机影响业务。
6.生产环境备份4.9.2集群
7.生产环境配置4.9.6集群(参照测试环境配置过程)
8.生产环境停机4.9.2集群,复制store存储目录到4.9.6集群,启动4.9.6集群,并测试4.9.6有无异常。
注意:1-5步骤在测试机器进行,重点是验证升级思路及可行性,避免在生产环境升级时遇到问题不能及时解决导致消息队列长时间停机。6-8步骤在生产环境进行,第8步骤生产MQ停机约在10分钟左右。
二、实际操作(生产环境单机双主双从异步集群)
1.上传4.9.6mq程序包并解压
2.调整/rocketmq-4.9.6/bin目录下runserver.sh、runbroker.sh里的JVM内存参数(参照4.9.2版本的JVM参数即可)。
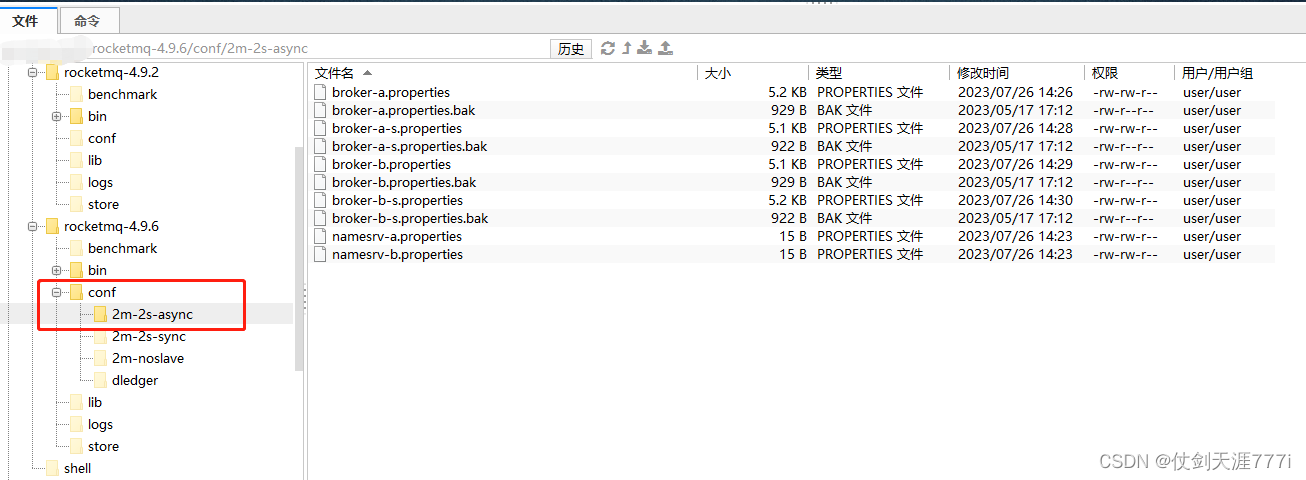
3.rocketmq-4.9.6/conf/2m-2s-async添加配置文件(可以直接copy原4.9.2的,再逐个检查修改):
4.在rocketmq-4.9.6目录下创建logs文件夹用于存储日志文件(我在broker中配置了日志输出在/rocketmq-4.9.6/logs下)
5.调整LINUX机器ROCKETMQ_HOME环境变量到4.9.6目录,并重新加载确保可用。
修改/etc/profile文件,
修改后可以通过命令 echo $ROCKETMQ_HOME 查询环境变量信息,
若未改变,需要通过命令 source /etc/profile 重新加载下即可。6.停机4.9.2集群,复制store存储目录到4.9.6,启动4.9.6集群。
提示:此步骤涉及到生产环境MQ停机,停机时间越短越好,故提前准备好4.9.2停机命令、store存储目录复制命令、4.9.6集群启动命令等,避免因LINUX命令不熟悉延长停机时间。
7.通过rocketmq-dashboard仪表板查看MQ启动情况,并及时进行消息的生产和消费测试,第一时间确保升级后无异常。
启动命令:
# namesrv启动
nohup ${ROCKETMQ_HOME}/bin/mqnamesrv -c ${ROCKETMQ_HOME}/conf/2m-2s-async/namesrv-a.properties &>${ROCKETMQ_HOME}/logs/mqnamesrv_a.log 2>&1 &
nohup ${ROCKETMQ_HOME}/bin/mqnamesrv -c ${ROCKETMQ_HOME}/conf/2m-2s-async/namesrv-b.properties &>${ROCKETMQ_HOME}/logs/mqnamesrv_b.log 2>&1 &
#broker启动
nohup ${ROCKETMQ_HOME}/bin/mqbroker -c ${ROCKETMQ_HOME}/conf/2m-2s-async/broker-a.properties &>${ROCKETMQ_HOME}/logs/broker_a.log 2>&1 &
nohup ${ROCKETMQ_HOME}/bin/mqbroker -c ${ROCKETMQ_HOME}/conf/2m-2s-async/broker-a-s.properties &>${ROCKETMQ_HOME}/logs/broker_as.log 2>&1 &
nohup ${ROCKETMQ_HOME}/bin/mqbroker -c ${ROCKETMQ_HOME}/conf/2m-2s-async/broker-b.properties &>${ROCKETMQ_HOME}/logs/broker_b.log 2>&1 &
nohup ${ROCKETMQ_HOME}/bin/mqbroker -c ${ROCKETMQ_HOME}/conf/2m-2s-async/broker-b-s.properties &>${ROCKETMQ_HOME}/logs/broker_bs.log 2>&1 &三、发送消息测试过程记录
1. 生产者发送MQ消息:


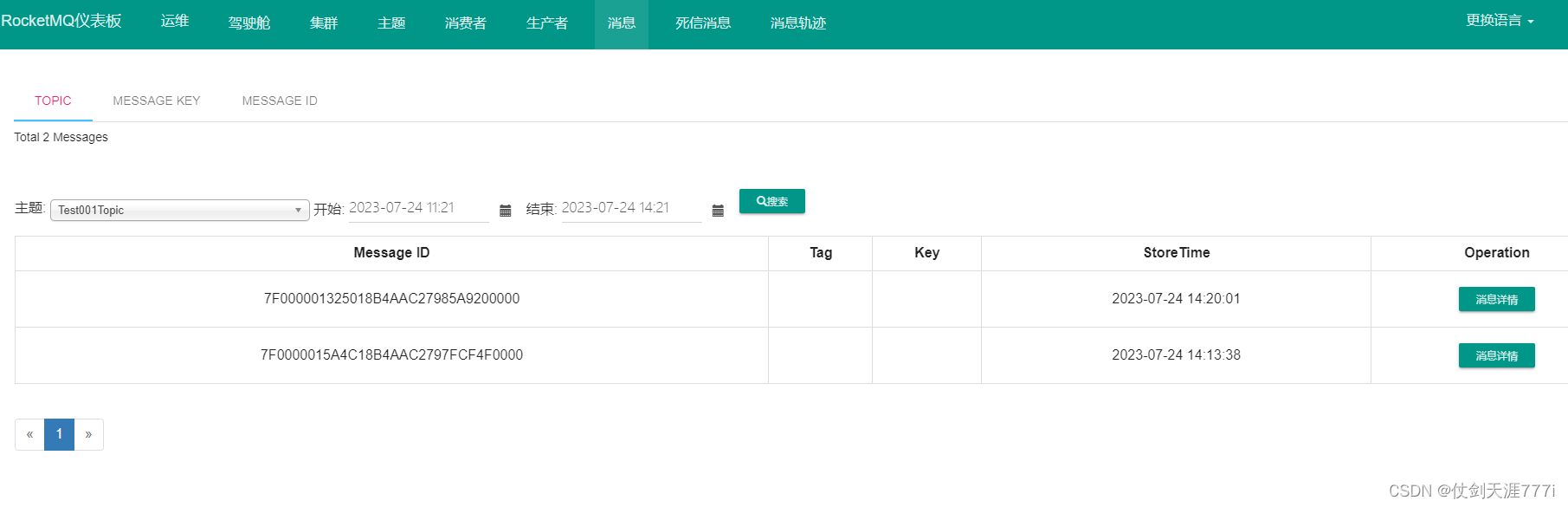
2.rocketmq-dashboard仪表板查看刚刚发送的消息
3. 消费者成功消费MQ消息


相关文章:
RocketMQ集群4.9.2升级4.9.6版本
本文主要记录生产环境短暂停机升级RocketMQ版本的过程 一、整体思路 1.将生产环境MQ4.9.2集群同步到测试环境,并启动,确保正常运行。 2.参照4.9.2配置4.9.6集群 3.停掉4.9.2集群,启动4.9.6集群,测试确保正常运行。 4.停掉4.9.6集…...

具身智能controller---RT-1(Robotics Transformer)(上---方法介绍)
具身智能controller---RT-1(Robotics Transformer)(上---方法介绍) 相关链接摘要和简介相关工作与预备知识系统概述模型 RT-1: ROBOTICS TRANSFORMER模型 相关链接 github链接 主页链接(包括论文和训练数据集…...
视频内存过大如何压缩变小?这个压缩方法了解一下
在日常生活中,不管是日常随手拍的视频还是在工作中遇到的视频文件,在编辑处理的时候,如果视频的内存过大,不仅会占用很大的内存,在传送的时候也会花费很长时间,这时候将视频给压缩一下就可以很好的解决这一…...
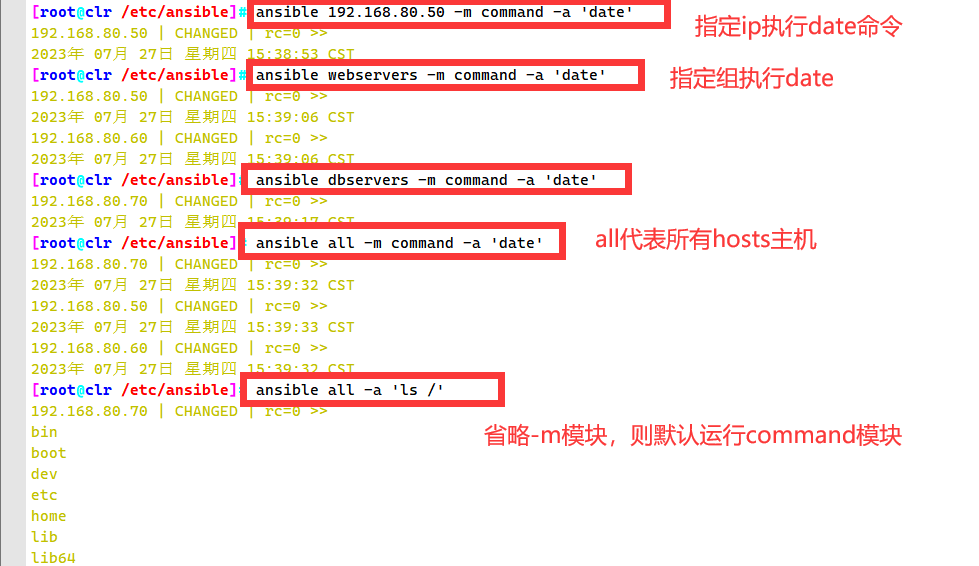
【Ansible】自动化部署工具-----Ansible
自动化部署工具-Ansible 1.Ansible概述2.ansible环境安装部署2.1 command模块2.2 shell模块2.3 cron模块2.4 user模块2.5 group模块2.6 copy模块2.7 file模块2.8 hostname模块2.9 ping模块2.10 yum模块2.11 service/systemd模块2.12 script模块2.13 mount模块2.14 archive模块2…...

Ubuntu下安装Node.js;npm
Ubuntu下安装Node.js curl -sL https://deb.nodesource.com/setup_8.x | sudo -E bash - sudo apt-get install -y nodejs Ubuntu下安装npm sudo apt-get install npm Ubuntu下指定版本升级npm sudo npm install npm8.15.0 -g Ubuntu下升级node 安装n模块:s…...

设计模式-模版方法模式
生活中处处存在模版,模版定义了大的框架,具体内容由使用者填充即可,这给很多人的生活、工作带来了很大的遍历。比如: PPT模版:好的PPT模版提供了更全面的叙述框架,更优美的UI画面&图标,提升…...

Linux 学习记录59(ARM篇)
Linux 学习记录59(ARM篇) 本文目录 Linux 学习记录59(ARM篇)一、IIC总线1. 概念2. IIC总线硬件连接 二、系统框图三、IIC时序1. 起始信号 / 停止信号2. 数据传输信号3. 应答信号 / 非应答信号4. 寻址信号 四、IIC协议1. 主机给从机发送一个字节(写)2. 主机给从机发送多个连续字…...

TypeScript -- 函数
文章目录 TypeScript -- 函数JS -- 函数的两种表现形式函数声明函数的表达式es6 箭头函数 TS -- 定义一个函数TS -- 函数声明使用接口(定义)ts 定义参数可选参数写法 -- ?的使用TS函数 -- 设置剩余参数函数重载 TypeScript – 函数 JS – 函数的两种表现形式 我们熟知js有两…...
网页开发基础——HTML
一、flask框架 Flask是一种轻量级的Python web应用程序框架,可以帮助使用者快速构建Web应用程序和API。由于其简洁、灵活和易于上手的特点,Flask被广泛用于开发小型到中型的Web应用程序和后端API。本次我们主要是使用flask框架,进行一个小型w…...

C# 继承,封装,多态等知识点
一:面向对象的三大特征:继承性,封装性,多态性 1:继承性:继承主要描述是类与类之间的关系,通过继承可以在无需重新编写原有的类的情况下,对原有的类的功能进行扩展。 2:封…...

决策树概述
文章目录 决策树介绍1.介绍**决策树API:**构建决策树的三个步骤决策树的优缺点通过sklearn实现决策树分类并进一步认识决策树2. ID3 决策树1. 信息熵2. 信息增益**定义:****根据信息增益选择特征方法是:****算法:**3. ID3算法步骤4. 例子:3. C4.5 决策树1. 信息增益率计算…...
青枫壁纸小程序V1.4.0(后端SpringBoot)
引言 那么距离上次的更新已经过去了5个多月,期间因为忙着毕业设计的原因,更新的速度变缓了许多。所以,这次的更新无论是界面UI、用户功能、后台功能都有了非常大的区别。希望这次更新可以给用户带来更加好的使用体验 因为热爱,更…...
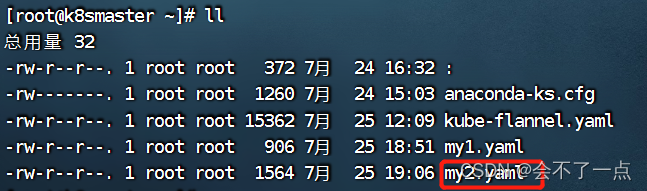
Error: unknown flag: --export 【k8s,kubernets报错】
报错情况如下: [rootk8smaster ~]# kubectl get deploy nginx -oyaml --export > my2.yaml Error: unknown flag: --export See kubectl get --help for usage.原因: --export在所使用的版本中已被移除 解决:去除--export即可,…...
进入linux系统中修改网段-ip
第一步 :开启虚拟机 cd 到 /etc/sysconfig/network-scripts 目录下,输入命令给ls,展示这个目录下文件和文件夹 第二步:进入到以ifcfg开头的文件 # ifcfg开头的文件,如果有多个网卡,有多个ifcfg-ensxx文件 命令…...
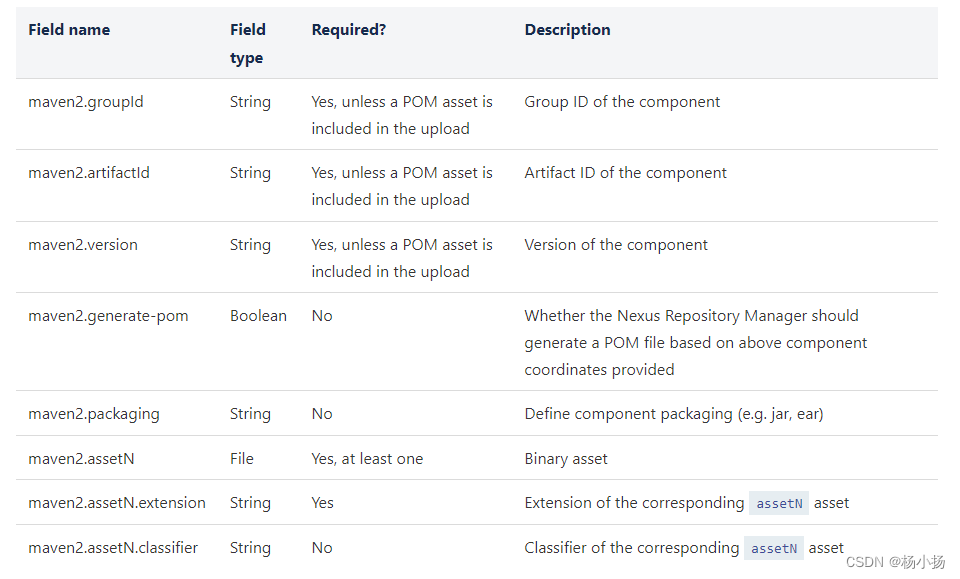
通过REST API接口上传Nexus仓库
一、Nexus API文档 API文档链接:Components API 二、上传API接口说明 在Nexus中可以直接调试api接口,url参考:http://localhost:8081/#admin/system/api 三、上传请求案例 $ curl -X POST "http://localhost:8081/service/rest/v1/c…...

Docker镜像端口映射简介及配置指南
目录 引言:什么是端口映射?配置端口映射的步骤:1. 创建Docker镜像:2. 选择要映射的端口:3. 运行容器并进行端口映射:4. 验证端口映射: 示例:结论: 引言: Doc…...
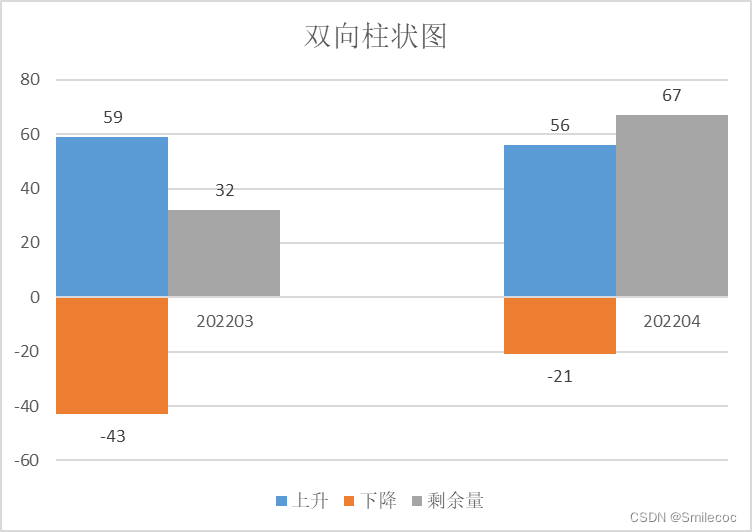
Excel双向柱状图的绘制
Excel双向柱状图在绘制增减比较的时候经常用到,叫法繁多,双向柱状图、上下柱状图、增减柱状图都有。 这里主要介绍一下Excel的基础绘制方法和复杂一点的双向柱状图的绘制 基础双向柱状图的绘制 首先升降的数据如下: 月份上升下降20220359-…...
Linux6.17 Docker 安全及日志管理
文章目录 计算机系统5G云计算第四章 LINUX Docker 安全及日志管理一、Docker 容器与虚拟机的区别1.隔离与共享2.性能与损耗 二、Docker 存在的安全问题1.Docker 自身漏洞2.Docker 源码问题 三、Docker 架构缺陷与安全机制1.容器之间的局域网攻击2.DDoS 攻击耗尽资源3.有漏洞的系…...

学好Elasticsearch系列-索引的CRUD
本文已收录至Github,推荐阅读 👉 Java随想录 文章目录 创建索引删除索引查询数据添加 & 更新数据cat命令公共参数 常用命令aliases 显示别名allocation 显示每个节点的分片数和磁盘使用情况count 显示整个集群或者索引的文档个数fielddata 显示每个节…...

Python - OpenCV机器视觉库的简单使用经验
OpenCV是一个开源的计算机视觉库,它支持多种编程语言,包括Python。下面是Python 3中OpenCV的详细解析: 安装OpenCV 在Python 3中安装OpenCV,可以使用pip命令来安装。例如,在终端中输入以下命令: pip ins…...

SSE 基础知识
SSE 基础知识 一、概念定义 SSE 全称 Server-Sent Events,是基于HTTP协议的服务器单向数据推送技术。 建立一次长连接后,服务端可主动持续向前端推送数据,无需客户端反复轮询请求。 二、核心特点 单向通信:仅服务器 → 客户端发送…...
)
Sora 2原生接入Unity 6.0:5步完成神经渲染管线嵌入,实测帧率提升47%(附GitHub认证插件)
更多请点击: https://kaifayun.com 第一章:Sora 2与Unity整合 Sora 2作为新一代AI视频生成引擎,其开放API设计天然支持与实时3D引擎的深度协同。Unity 2023.2版本通过URP(Universal Render Pipeline)与C# Job System提…...

第三卷第4章:原型模式设计思想
第三卷第4章:原型模式设计思想 目录介绍 01.案例引入与思考 1.1 痛点场景 1.2 它哪里不舒服 1.3 引出本篇主角 02.原型模式介绍 2.1 原型模式由来 2.2 原型模式定义...

DragonBones与Godot集成:骨骼动画的可编程化实践
1. 为什么在Godot里用DragonBones不是“锦上添花”,而是“绕不开的刚需” 去年上线一个横版动作手游Demo时,美术团队交来一套20个角色、每个角色含8套动画(待机/跑动/跳跃/攻击/受击/死亡/闪避/必杀)的Spine资源。我兴冲冲导入God…...

基于Netburner NANO54415构建工业级嵌入式Web服务器:从硬件选型到广域监控实战
1. 项目概述:一个为广域与本地监控而生的嵌入式Web服务器如果你正在寻找一个能部署在野外、工厂角落或者任何需要远程数据采集与控制场景下的嵌入式Web服务器方案,并且对市面上那些要么性能孱弱、要么开发门槛极高的开发板感到厌倦,那么这个基…...

TVA注意力层INT8量化配置技巧
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...

yolo视频识别 车辆速度估计识别 yolo11视频实时速度测量与测速估计
文章目录YOLOv11:视频实时速度测量与测速估计一、YOLOv11概述二、速度测量原理三、距离测量方法四、应用场景五、实践案例以下是关于使用YOLOv11进行视频实时速度测量与测速估计的介绍: YOLOv11:视频实时速度测量与测速估计 随着计算机视觉…...
)
Unity3D深度纹理实战:手把手教你实现可交互的激光雷达扫描特效(附完整C#/Shader代码)
Unity3D深度纹理实战:手把手教你实现可交互的激光雷达扫描特效(附完整C#/Shader代码)在科幻题材的游戏开发中,激光雷达扫描特效是营造科技感的经典元素。从《赛博朋克2077》的战术目镜到《看门狗》的环境扫描,这种动态…...
)
告别KITTI!用TartanAir数据集在Unreal Engine仿真环境里“虐”你的VSLAM算法(附保姆级下载与使用指南)
用TartanAir数据集在Unreal Engine中打造VSLAM算法的"极限考场"当你的视觉SLAM算法在KITTI数据集上跑出98%的准确率时,是否意味着它已经准备好应对真实世界的复杂场景?现实往往会给乐观的开发者当头一棒——实验室里的"优等生"在遇到…...
)
【独家首发】DeepSeek官方未公开的集成测试Checklist(含23项生产环境准入阈值与压测基线)
更多请点击: https://codechina.net 第一章:DeepSeek集成测试方案 DeepSeek模型的集成测试需覆盖推理服务稳定性、多模态输入兼容性、上下文长度边界及API协议一致性四大核心维度。测试环境基于Kubernetes集群部署,采用PrometheusGrafana监控…...