MATLAB与ROS联合仿真(慕羽☆)全套开源资料索引
自2021年9月份开始进行MATLAB与ROS联合仿真相关的研究,至2021年12月份研究基本上结束,至今,已经近两年时间,期间曾收到过很多小伙伴的私信,想让我出点教程,期间我也曾多次想要抽点时间出教程,但很遗憾,总会被各种各样的事情顶掉,一拖再拖,就到了现在。

emm,由于开发过去的时间太长,在这两年中,我也没有再用到相关内容,好多技术细节已经遗忘,好在当时记录下了比较详细的整套技术文档(当然,会有一些遗漏),最近整理了一下,近期会陆续的公布出来。
至于视频教程,只能说,很抱歉,由于很多细节的遗忘,再加上现在并没有太多时间去把相关的工作重新熟悉一遍,所以只能出一个引导性的介绍视频,大致会介绍想要进行MATLAB与ROS联合仿真需要依次进行那些工作,流程是什么样子的,详细的细节需要大家自行阅读本文列举的相关资料了。
先回顾一下当时写的探索总结及仿真效果的视频演示,如下所示:
《为期两个月的MATLAB与ROS联合仿真探索总结——因为热爱,所以无所畏惧》
MATLAB与ROS联合仿真探索总结
概括性视频教程如下所示:
MATLAB与ROS联合仿真探索总结、流程介绍、实例操作演示

第一章 仿真环境搭建
关于MATLAB与ROS联合仿真的仿真环境搭建,我们提供了如下两种方案供大家选择,大家可以根据自己的实际情况自行选择。
1、选择一:直接使用提供的虚拟机镜像 (新手推荐)
选择一是一种走捷径的选择,预测大部分人会选择这条路,你只需要在你的电脑上安装完VMware这个软件,然后按照下面博客中介绍的内容操作即可。
《MATLAB与ROS联合仿真(慕羽)虚拟机镜像文件使用方法》
完成上述操作后,你可以直接跳过Ubuntu20.04的安装、ROS的安装、ROS的环境搭建等部分,直接开始建立MATLAB与ROS的通讯,然后愉快的开始进行联合仿真实验,而且不会遇到文档资料提到的可能遇到的问题
2、选择二:使用提供的文档资料自主搭建实验环境
选择二是有一定挑战性的选择,先为你的探索精神点赞,选择这条路意味着你需要自己按照提供的文档资料,从零开始,自己搭建实验的环境,需要完成ROS的安装部分、ROS仿真环境的搭建部分的文档资料所介绍的内容,参考步骤及相关资料的链接如下:
(1)安装VMware软件
(2)安装完VMware后,可以观看古月老师的视频教程,来创建自己的虚拟机,并安装Ubuntu20.04系统(视频里安装的是18.04,我们需要装20.04,步骤类似),视频链接如下:
《ROS入门21讲——P2.Linux系统介绍及安装》
(3)完成以上两步后就可以根据以下资料在ubuntu20.04中安装ROS系统了
《详细介绍如何在ubuntu20.04中安装ROS系统,超快完成安装(最新版教程)》
(4)按照以下资料,进行MATLAB与ROS联合仿真所需的ROS环境搭建
《MATLAB与ROS联合仿真—ROS环境搭建及相关准备工作(上)》
《MATLAB与ROS联合仿真—ROS环境搭建及相关准备工作(下)》
(5)此外你需要额外修改如下图所示的路径下的名为map_easyworld.yaml的文件的内容的第一行红框内的gly为你的虚拟机用户名
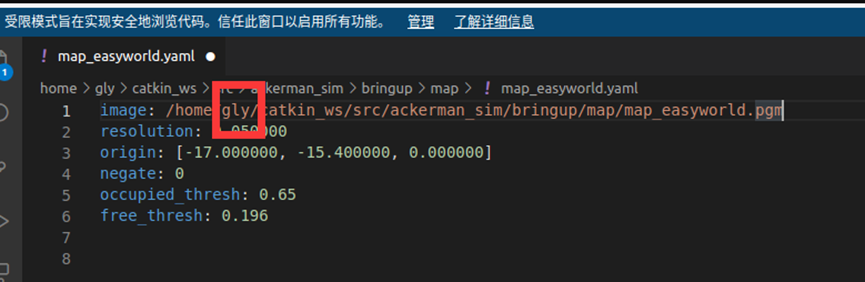
然后你和选择道路一的小伙伴一起来到了ROS与MALTAB通讯建立部分,完成后就可以愉快的开始实验了,当然在这个过程中你可能会遇到包括但不限于以下的问题,并按照其介绍的解决方法进行解决。
问题①:若VMware安装完VMware Tools后依然不能将主机下的的文件拖拽或复制到虚拟机中时,重装了多次依然不行的情况下,此时我们不妨另辟蹊径,使用共享文件夹得方式来实现主机文件与VMware虚拟机中文件的交互,详情可见以下资料
《通过共享文件夹的方式实现主机文件与VMware虚拟机中文件的交互》
问题②:Ubuntu20.04运行python文件时报错No module named ‘rospkg‘的解决方法
《Ubuntu20.04运行python文件时报错No module named ‘rospkg‘的解决方法》

第二章 建立ROS与MATLAB的通讯
MATLAB与ROS的联合仿真有两种常见的实现模式,第一种即采用Windows下的MATLAB与Ubuntu中的ROS进行联合仿真,第二种,是直接在Ubuntu中实现MATLAB与ROS的联合仿真,个人推荐使用第一种,本开源资料以第一种为例,当然也适用于第二种。
若采用第一种模式,则按照以下资料建立MATLAB与ROS的通讯(推荐)
《实现Win10环境下的MATLAB与虚拟机Ubuntu中的ROS的通讯的方法》
若采用第二种模式,则按照以下资料建立MATLAB与ROS的通讯
《详细介绍如何在Ubuntu中实现MATLAB与ROS的通讯,借助MATALB进行ROS开发》

第三章 MATLAB与ROS联合仿真常用simulink模块介绍
当我们进行MATLAB与ROS联合仿真的过程中,想要实现某项功能或者完成某项任务的时候,可以借助MATLAB中相关的simulink模块来减少工作量,本部分用于介绍联合仿真过程中常用的simulink模块,详情可见以下资料:
《使用MATALB来辅助ROS开发时常用的simulink模块介绍》

第四章 MATLAB与ROS联合仿真功能模块介绍
基于上述simulink中的ROS工具箱,我们开发了一系列用于MATLAB与ROS联合仿真的模块,采用模块化的思想,将各部分功能拆分成一个个可自由拼接的模块,提高程序的可复用性,同时便于小伙伴们进行二次开发。
我将这些模块分为五类:即白色背景的参数给定类模块、淡黄色背景的可视化绘图类模块、紫色背景的发送消息至ROS类模块,绿色背景的从ROS订阅消息类模块,淡蓝色背景的控制类模块。各类功能模块的详情介绍及搭建过程如下面的资料所示:
《MATLAB与ROS联合仿真——订阅ROS消息类功能模块介绍》
《MATLAB与ROS联合仿真——发布ROS消息类功能模块介绍》
《MATLAB与ROS联合仿真——控制类功能模块介绍》
《MATLAB与ROS联合仿真——绘图类功能模块介绍》
《MATLAB与ROS联合仿真——参数给定类功能模块》
注:上述模块中,模块名字后面带 “C” 的,说明该模块支持生成C++代码,若工程文件均由带“C”的模块拼接而成,则可以由simulink的代码生成器,生成C++的ROS代码,在ROS中独立运行,该部分内容将在后续章节中介绍。

第五章 MATLAB与ROS联合仿真实例介绍
1、基础运动控制实例
基础运动控制实例主要包括:
(1)通过设定小车运动的速度及转角来控制ROS中小车运动。
(2)通过键盘输入指令控制ROS中小车运动,键盘输入w小车前行,s小车后退,a小车左转,d小车右转,输入其他按键小车停止运动。
(3)订阅Gazebo中反馈的ROS小车的位置信息,并实时绘制出小车的运动轨迹图.
2、轨迹跟踪控制实例
轨迹跟踪控制实例主要包括:
(1)对给定的目标点进行跟踪控制
(2)对给定的轨迹进行跟踪控制
(3)实时绘制给定期望轨迹与实际跟踪轨迹,进行跟踪效果评估。
3、SLAM建图及自主导航实例
(1)使用键盘控制小车运动,借助slam_gmapping功能包体验建图过程
(2)在gazebo地图的基础上绘制小车的运动轨迹
(3)借助move_base导航框架,体验在已知地图的情况下进行导航操作,在小车的运动路径上,添加障碍物,观察小车的避障能力,体会全局路径规划与局部路径规划的区别与配合
(4)订阅并观测小车搭载的深度相机反馈的RGB彩色图像及深度图像、点云图像
(5)将SLAM建图与导航结合起来,实现未知环境的自主探索与建图
以上三个实例的详情介绍如下所示:
MATLAB与ROS联合仿真——实例程序搭建思路

第六章 Simulink生成ROS代码
当我们用simulink完成控制程序的搭建后,我们期望下一次可以直接对ROS进行控制,而不是每次都需要启动matlab和simulink,因此我们可以使用simulink的代码生成器,生成ROS代码,我们提供的模块中名字后面带 “C” 的,说明该模块支持生成C++代码,若工程文件均由带“C”的模块拼接而成,则可以由simulink的代码生成器,生成C++的ROS代码,在ROS中独立运行,实现详情可见如下资料:
MATLAB与ROS联合仿真——Simulink生成ROS代码

相关文章:
MATLAB与ROS联合仿真(慕羽☆)全套开源资料索引
自2021年9月份开始进行MATLAB与ROS联合仿真相关的研究,至2021年12月份研究基本上结束,至今,已经近两年时间,期间曾收到过很多小伙伴的私信,想让我出点教程,期间我也曾多次想要抽点时间出教程,但…...

三、深入浅出WPF之控件与布局
三、控件与布局 图形化用户界面:Graphic User Interface ,它的便捷之处在于对数据的直观性表达,把抽象性的对象通过界面的形式展现出来。很多编程都要自己的GUI工具:像java的Swing、c++的QT 、C#的winform等等. 在日常工作中我们打交道最多的控件无外乎5类: (1)布局控件…...

社群积分运营策略:增加用户忠诚度
构建稳固的用户忠诚度是企业私域营销中至关重要的一环,而社群积分运营策略成为实现这一目标的有效手段。通过巧妙利用积分激励,社群积分运营可以吸引用户积极参与,增加用户的忠诚度和活跃度。本文将深入探讨几个实用的社群积分运营策略&#…...
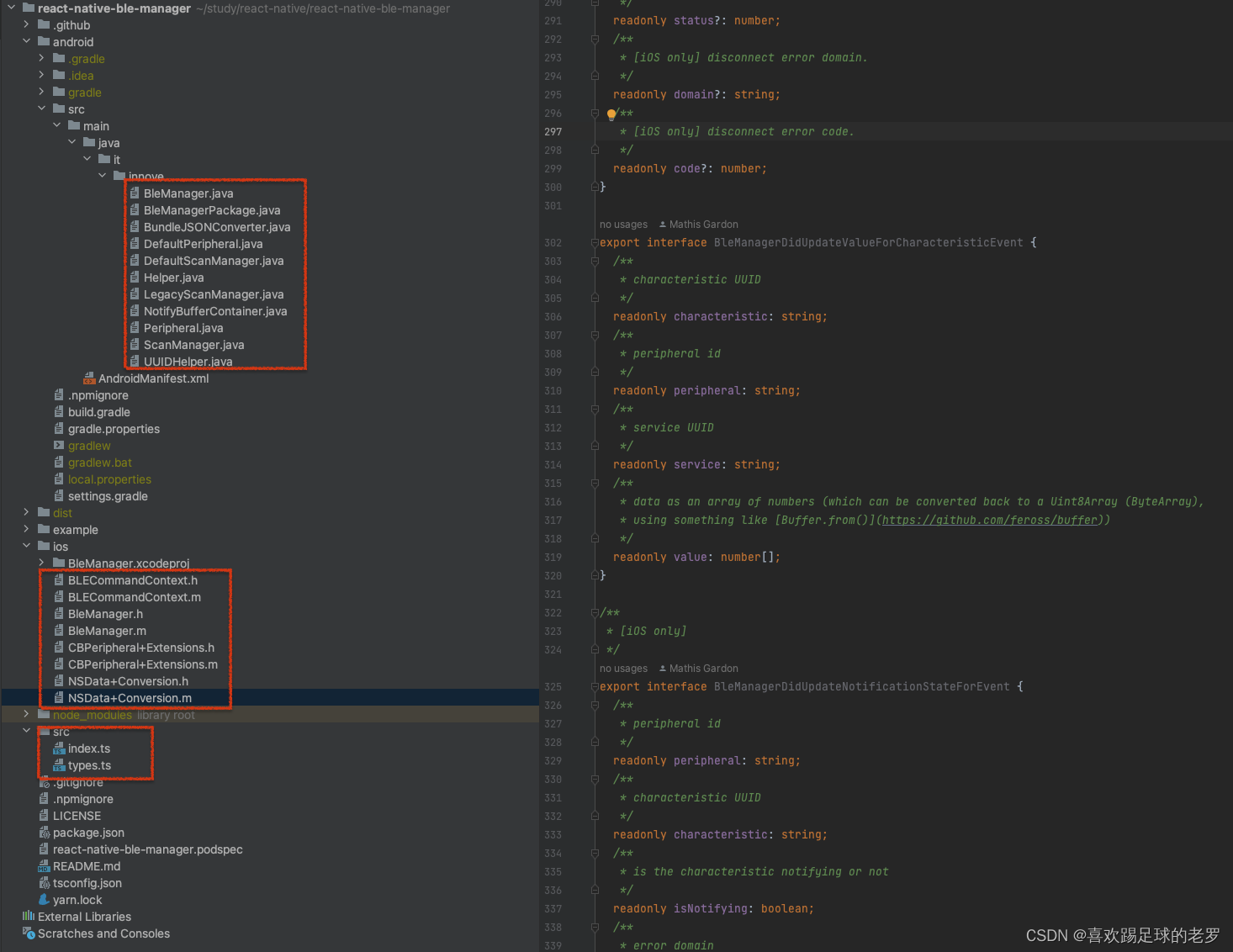
推荐用于学习RN原生模块开发的开源库—react-native-ble-manager
如题RN的原生模块/Native Modules的开发是一项很重要的技能,但RN官网的示例又比较简单,然后最近我接触与使用、还有阅读了react-native-ble-manager的部份源码,发现里边完全包含了一个Native Modules所涉及的知识点/技术点,故特推…...
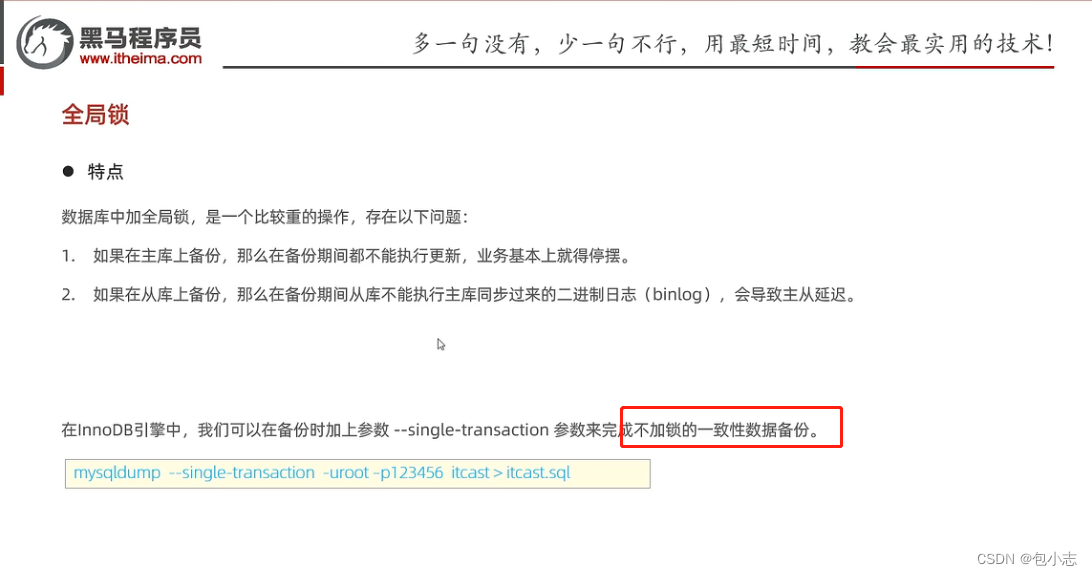
MySQL中锁的简介——全局锁
1.锁的概述及分类 2.全局锁的介绍 给数据库加全局锁: flush tables with read lock;数据备份: mysqldump备份指令 root用户名 1234 密码 itcast数据库名称 itcast.sql备份文件名称 mysqldump -uroot -p1234 itcast >itcast.sql;数据库全局锁解锁&am…...

RocketMQ集群4.9.2升级4.9.6版本
本文主要记录生产环境短暂停机升级RocketMQ版本的过程 一、整体思路 1.将生产环境MQ4.9.2集群同步到测试环境,并启动,确保正常运行。 2.参照4.9.2配置4.9.6集群 3.停掉4.9.2集群,启动4.9.6集群,测试确保正常运行。 4.停掉4.9.6集…...

具身智能controller---RT-1(Robotics Transformer)(上---方法介绍)
具身智能controller---RT-1(Robotics Transformer)(上---方法介绍) 相关链接摘要和简介相关工作与预备知识系统概述模型 RT-1: ROBOTICS TRANSFORMER模型 相关链接 github链接 主页链接(包括论文和训练数据集…...
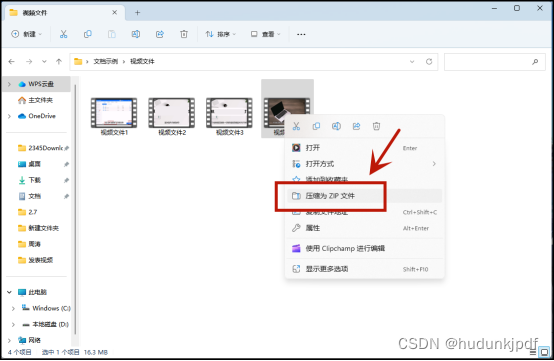
视频内存过大如何压缩变小?这个压缩方法了解一下
在日常生活中,不管是日常随手拍的视频还是在工作中遇到的视频文件,在编辑处理的时候,如果视频的内存过大,不仅会占用很大的内存,在传送的时候也会花费很长时间,这时候将视频给压缩一下就可以很好的解决这一…...
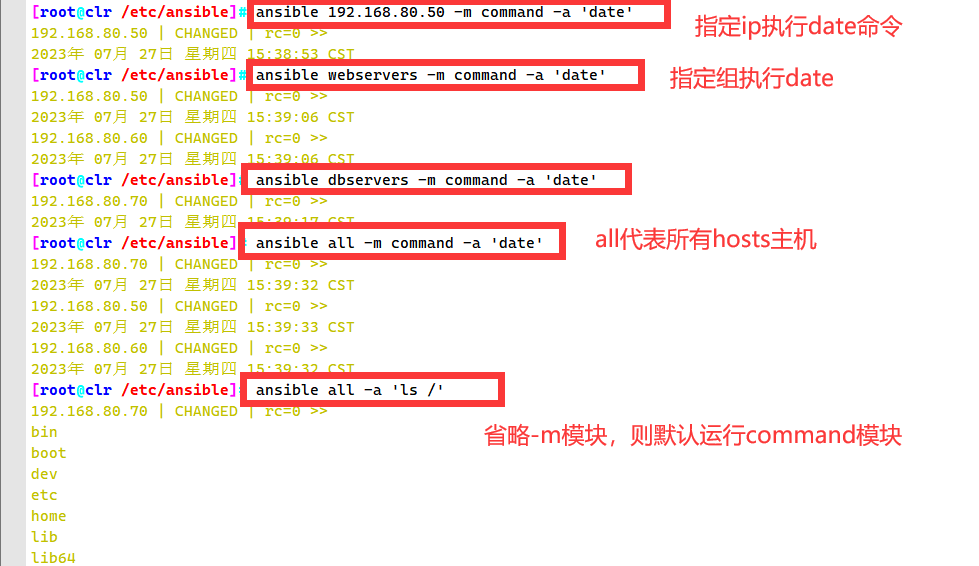
【Ansible】自动化部署工具-----Ansible
自动化部署工具-Ansible 1.Ansible概述2.ansible环境安装部署2.1 command模块2.2 shell模块2.3 cron模块2.4 user模块2.5 group模块2.6 copy模块2.7 file模块2.8 hostname模块2.9 ping模块2.10 yum模块2.11 service/systemd模块2.12 script模块2.13 mount模块2.14 archive模块2…...

Ubuntu下安装Node.js;npm
Ubuntu下安装Node.js curl -sL https://deb.nodesource.com/setup_8.x | sudo -E bash - sudo apt-get install -y nodejs Ubuntu下安装npm sudo apt-get install npm Ubuntu下指定版本升级npm sudo npm install npm8.15.0 -g Ubuntu下升级node 安装n模块:s…...

设计模式-模版方法模式
生活中处处存在模版,模版定义了大的框架,具体内容由使用者填充即可,这给很多人的生活、工作带来了很大的遍历。比如: PPT模版:好的PPT模版提供了更全面的叙述框架,更优美的UI画面&图标,提升…...

Linux 学习记录59(ARM篇)
Linux 学习记录59(ARM篇) 本文目录 Linux 学习记录59(ARM篇)一、IIC总线1. 概念2. IIC总线硬件连接 二、系统框图三、IIC时序1. 起始信号 / 停止信号2. 数据传输信号3. 应答信号 / 非应答信号4. 寻址信号 四、IIC协议1. 主机给从机发送一个字节(写)2. 主机给从机发送多个连续字…...

TypeScript -- 函数
文章目录 TypeScript -- 函数JS -- 函数的两种表现形式函数声明函数的表达式es6 箭头函数 TS -- 定义一个函数TS -- 函数声明使用接口(定义)ts 定义参数可选参数写法 -- ?的使用TS函数 -- 设置剩余参数函数重载 TypeScript – 函数 JS – 函数的两种表现形式 我们熟知js有两…...
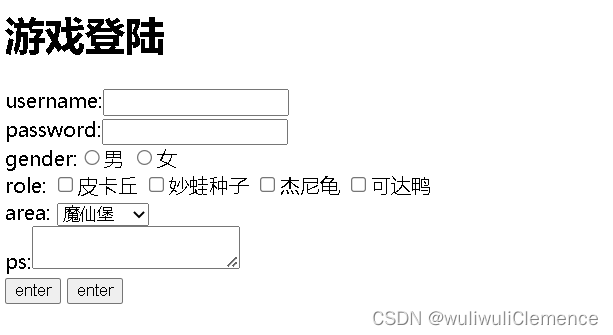
网页开发基础——HTML
一、flask框架 Flask是一种轻量级的Python web应用程序框架,可以帮助使用者快速构建Web应用程序和API。由于其简洁、灵活和易于上手的特点,Flask被广泛用于开发小型到中型的Web应用程序和后端API。本次我们主要是使用flask框架,进行一个小型w…...

C# 继承,封装,多态等知识点
一:面向对象的三大特征:继承性,封装性,多态性 1:继承性:继承主要描述是类与类之间的关系,通过继承可以在无需重新编写原有的类的情况下,对原有的类的功能进行扩展。 2:封…...

决策树概述
文章目录 决策树介绍1.介绍**决策树API:**构建决策树的三个步骤决策树的优缺点通过sklearn实现决策树分类并进一步认识决策树2. ID3 决策树1. 信息熵2. 信息增益**定义:****根据信息增益选择特征方法是:****算法:**3. ID3算法步骤4. 例子:3. C4.5 决策树1. 信息增益率计算…...
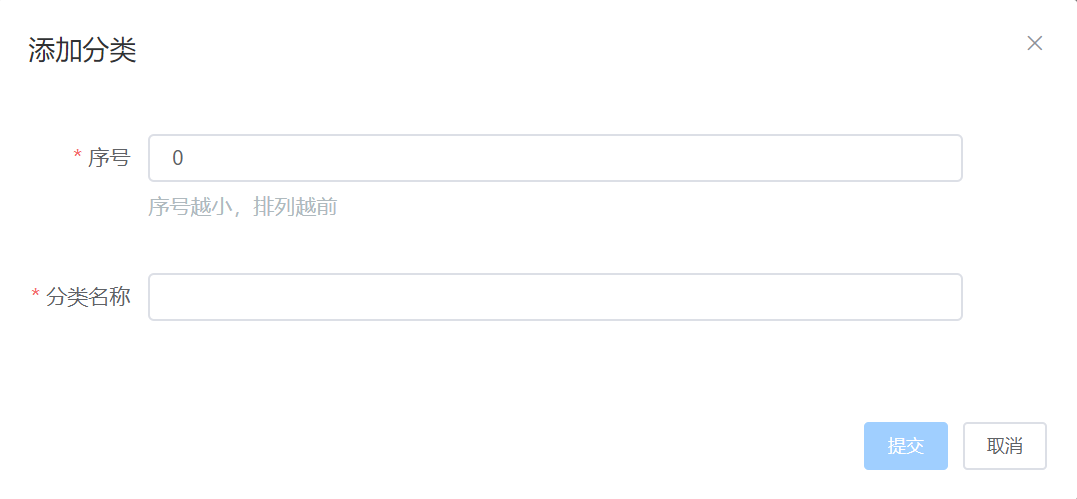
青枫壁纸小程序V1.4.0(后端SpringBoot)
引言 那么距离上次的更新已经过去了5个多月,期间因为忙着毕业设计的原因,更新的速度变缓了许多。所以,这次的更新无论是界面UI、用户功能、后台功能都有了非常大的区别。希望这次更新可以给用户带来更加好的使用体验 因为热爱,更…...
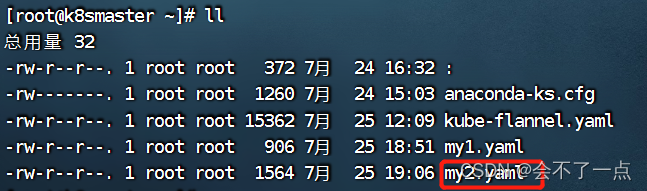
Error: unknown flag: --export 【k8s,kubernets报错】
报错情况如下: [rootk8smaster ~]# kubectl get deploy nginx -oyaml --export > my2.yaml Error: unknown flag: --export See kubectl get --help for usage.原因: --export在所使用的版本中已被移除 解决:去除--export即可,…...
进入linux系统中修改网段-ip
第一步 :开启虚拟机 cd 到 /etc/sysconfig/network-scripts 目录下,输入命令给ls,展示这个目录下文件和文件夹 第二步:进入到以ifcfg开头的文件 # ifcfg开头的文件,如果有多个网卡,有多个ifcfg-ensxx文件 命令…...
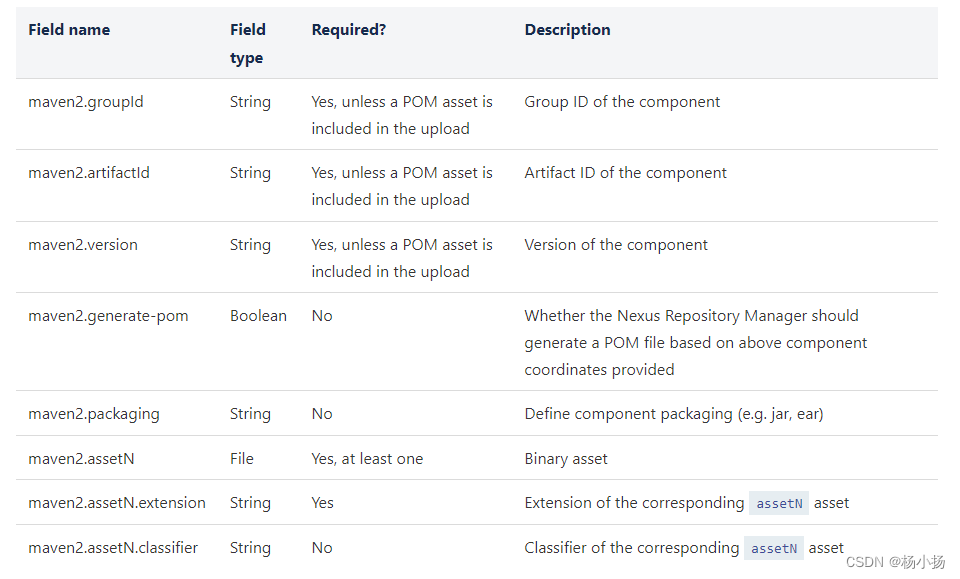
通过REST API接口上传Nexus仓库
一、Nexus API文档 API文档链接:Components API 二、上传API接口说明 在Nexus中可以直接调试api接口,url参考:http://localhost:8081/#admin/system/api 三、上传请求案例 $ curl -X POST "http://localhost:8081/service/rest/v1/c…...

FCEUX终极指南:从怀旧游戏到专业调试的完整NES模拟器教程
FCEUX终极指南:从怀旧游戏到专业调试的完整NES模拟器教程 【免费下载链接】fceux FCEUX, a NES Emulator 项目地址: https://gitcode.com/gh_mirrors/fc/fceux FCEUX是一款功能强大的开源NES模拟器,让你在现代电脑上完美重温经典红白机游戏。无论…...
 —— STM32的SPI外设)
STM32单片机学习(28) —— STM32的SPI外设
文章目录概述SPI通信的移位机制(以bit为单位)SPI外设框图第一部分:数据通路SPI通信的数据帧格式SPI外设移位机制(以字节为单位)第二部分:主机时钟生成器SPI通信时钟频率与传输速率第三部分:主从…...

DeepSeek系统设计辅助:如何在48小时内完成可审计、可回滚、可压测的AI服务架构图?
更多请点击: https://intelliparadigm.com 第一章:DeepSeek系统设计辅助 DeepSeek系统设计辅助模块面向架构师与后端工程师,提供模型能力调用、接口契约生成、异步任务编排等核心支撑能力。该模块不替代人工设计决策,而是通过结构…...

skills CANN开源社区贡献技能包开发指南
前言 开源社区的健康运转,不仅依赖核心代码的贡献,还需要降低贡献门槛、提供清晰的指南和自动化工具。skills仓库是CANN开源社区的"贡献技能包",提供了一系列辅助脚本、代码模板、CI检查和文档生成工具,帮助新手快速上…...

PCL 基于强度的双边滤波【2026最新版】
目录 一、算法原理 1、计算步骤 2、算法源码 3、函数解析 4、参考文献 二、代码实现 三、结果展示 四、滤波后未发生变化的原因 五、解决办法 六、结果展示 七、相关链接 本文由CSDN点云侠原创,博客长期更新,本文最近一次更新时间为:2026年5月24日。 一、算法原理 1、计算…...

反向海淘站点常见配置故障复盘与数据一致性优化方案
摘要反向海淘独立站运行过程中,容易出现价格换算异常、页面语种错乱、商品同步失败、订单状态停滞、运费计算偏差等问题。多数故障并非系统底层缺陷,而是配置逻辑理解偏差、数据规范不统一引发。本文结合实际运维场景,汇总高频故障成因&#…...

ncmdumpGUI终极指南:深度解析网易云音乐NCM加密文件转换技术
ncmdumpGUI终极指南:深度解析网易云音乐NCM加密文件转换技术 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI ncmdumpGUI是一款专为Windows平台设计…...

深入解析NxDumpTool:Switch游戏文件系统提取的终极指南 [特殊字符]
深入解析NxDumpTool:Switch游戏文件系统提取的终极指南 🎮 【免费下载链接】nxdumptool Generates XCI/NSP/HFS0/ExeFS/RomFS/Certificate/Ticket dumps from Nintendo Switch gamecards and installed SD/eMMC titles. 项目地址: https://gitcode.com…...

基于ESP32与MQTT的智能时钟:从硬件驱动到物联网系统集成实战
1. 项目概述:一个基于ESP32和MQTT的智能卧室时钟几年前,我在一个旧货市场淘到了四块巨大的SA40-19SRWA七段数码管,它们一直躺在我的零件箱里吃灰。直到ESP32这颗功能强大的物联网芯片变得唾手可得,我才终于为它们找到了完美的归宿…...

【C++修仙录02】筑基篇:vector 使用
嗨~大家好,这里是春栀怡铃声的博客~ “做你害怕的事,然后发现,不过如此~” 目录 创建vector 遍历方法 迭代器 reserve 扩容 resize 对size 进行改变 会加值,会减值 insert size capacity empty push_back erase swap c…...