DS18B20的原理及实例代码(51单片机、STM32单片机)
一、DS18B20介绍

DS18B20数字温度传感器是DALLAS公司生产的单总线器件,用它来组成一个测温系统具有线路简单,体积小,在一根通信线上可以挂很多这样的数字温度传感器,十分方便。
温度传感器种类众多,应用在高精度、高可靠性的场合时DALLAS公司生产的DS18B20温度传感器当仁不让。超小的体积,超低的硬件开销,抗干扰能力强,精度高,附加功能强,使得DS18B20更受欢迎。DS18B20的优势更是我们学习单片机技术和开发温度相关小产品的不二选择。了解工作原理和应用可以拓宽您对单片机开发的思路。
二、DS18B20特点

三、DS18B20在实际应用中的典型接法
1、工作在寄生电源下的典型接法

2、 外部供电下的典型接法


四、单总线时序
DS18B20采用1-wire Bus所有数据都在一条线上传输,因此单总线协议对时序要求非常严格以确保数据的完整性。
单总线信号类型:复位脉冲、存在脉冲、写0、写1、读0、读1。所有这些信号除存在脉冲由DS18B20发出的以外其他信号都由总线控制器发出。
数据传输总是从最低有效位开始。
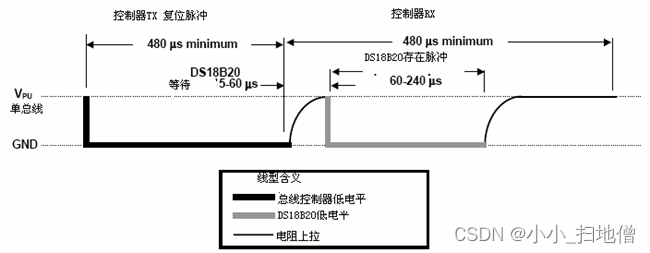
1、初始化时序
初始化时序里面包含了复位DS18B20和接收DS18B20返回的存在信号。
主机和DS18B20做任何通讯前都需要对其初始化。初始化期间,总线控制器拉低总线并保持480us以上挂在总线上的器件将被复位,然后释放总线,等到15-60us,此时18B20将返回一个60-240us之间的低电平存在信号。
复位脉冲和存在脉冲时序图:
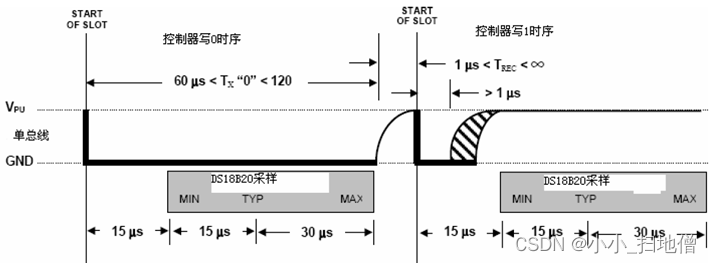
2、写时序
写时序分为写0时序和写1时序。
总线控制器通过控制单总线高低电平持续时间从而把逻辑1或0写DS18B20中。
总线控制器要产生一个写时序,必须将总线拉低最少1us,产生写0时序时总线必须保持低电平60~120us之间,然后释放总线,产生写1时序时在总线产生写时序后的15us内允许把总线拉高。注意:2次写周期之间至少间隔1us
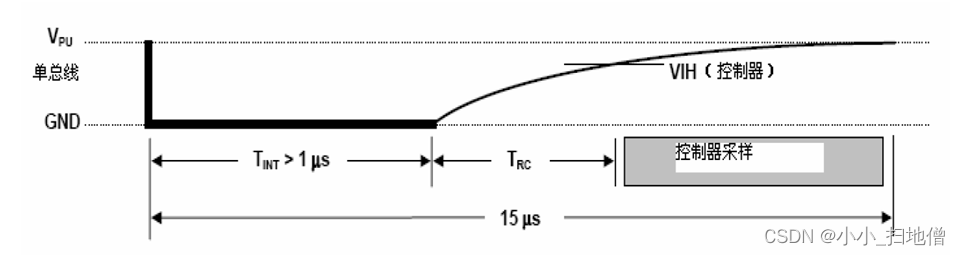
3、读时序
读时序分为读0时序和读1时序。
总线控制器通过读取由DS18B20控制的总线高低电平接收DS18B20数据,总线控制器要产生一个读时序,必须将总线拉低至少1us,然后释放总线,在读信号开始后15us内总线控制器采样总线数据,读一位数据至少保持在60us以上。注意:2次读周期之间至少间隔1us
读时序图:

读1详细时序图:
五、DS18B20暂存器

温度寄存器图表:


配置寄存器图表:


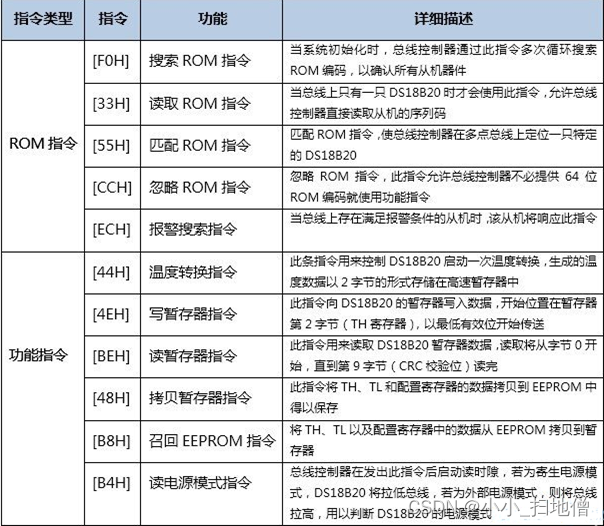
部分ROM指令及功能指令:
| 执行序列 |
| 通过单线总线端口访问DS18B20的协议如下: |
| 步骤1. 初始化 |
| 步骤2. ROM操作指令 |
| 步骤3. DS18B20功能指令 |
忽略ROM指令(CCh):
这条指令允许总线控制器不用提供64 位ROM 编码就使用功能指令。例如,总线控制器可以先发出一条忽略ROM 指令,然后发出温度转换指令[44h],从而完成温度转换操作。在单点总线情况下使用该命令,器件无需发回64 位ROM 编码,从而节省了时间。如果总线上有不止一只从机,若发出忽略ROM指令,由于多只从机同时传送信号,总线上就会发生数据冲突。
六、DS18B20功能指令
1、温度转换指令(44h)
这条命令用以启动一次温度转换。温度转换指令被执行,产生的温度转换结果数据以2个字节的形式被存储在高速暂存器中,而后DS18B20保持等待状态。
2、读暂存器指令(BEh)
这条命令读取暂存器的内容。读取将从字节0 开始,一直进行下去,直到读完暂存器所有字节,如果不想读完所有字节,控制器可以在任何时间发出复位命令来中止读取。
3、写暂存器指令(4Eh)
这条命令向DS18B20 的暂存器写入数据,开始位置在TH 寄存器(暂存器的第2个字节),接下来写入TL 寄存器(暂存器的第3 个字节),最后写入配置寄存器(暂存器的第4 个字节)
4、拷贝暂存器指令(48h)
这条命令把TH,TL 和配置寄存器(第2、3、4 字节)的内容拷贝到EEPROM 中。
七、执行序列
通过单线总线端口访问DS18B20的协议如下:
步骤1. 初始化
步骤2. ROM操作指令
步骤3. DS18B20功能指令
温度转换命令
读取暂存器命令
八、DS18B20驱动代码
1、51单片机(数码管显示)
#include <reg52.h>
#include <intrins.h>
#define MAIN_Fosc 11059200UL //宏定义主时钟HZ
/*====================================自定义类型名
====================================*/
typedef unsigned char INT8U;
typedef unsigned char uchar;typedef unsigned int INT16U;
typedef unsigned int uint;/*====================================硬件接口位声明
====================================*/
sbit DS = P2^2; //DS18B20单总线
sbit DU = P2^6; //数码管段选
sbit WE = P2^7; //数码管位选
/*====================================
共阴极数码管段选码
====================================*/
uchar code table[]={
//0 1 2 3 4 5 6 7 8
0x3F, 0x06, 0x5B, 0x4F, 0x66, 0x6D, 0x7D, 0x07, 0x7F,
//9 A B C D E F - . 关显示
0x6F, 0x77, 0x7C, 0x39, 0x5E, 0x79, 0x71, 0x40, 0x80, 0x00};/*====================================
数码管位选码
====================================*///第1位 2位 3位 4位 5位 6位 7位 8位
uchar code T_COM[] = {0xfe, 0xfd, 0xfb, 0xf7, 0xef, 0xdf, 0xbf, 0x7f};//数码管位码/*====================================
函数:void Delay_Ms(INT16U ms)
参数:ms,毫秒延时形参
描述:12T 51单片机自适应主时钟毫秒级延时函数
====================================*/
void Delay_Ms(INT16U ms)
{INT16U i;do{i = MAIN_Fosc / 96000; while(--i); //96T per loop}while(--ms);
}
/*us延时函数,执行一次US--所需6.5us进入一次函数需要11.95us*/
void Delay_us(uchar us)
{while(us--);
}
/*====================================
函数:void Display(INT16U Value)
参数:Value,显示值 取值0-65535
描述:共阴极数码管显示函数可显示一个字节的数
====================================*/
void Display(INT16U Value) //注意由于需要显示的数大于一个字节所有形参需为int型
{
//------------------------------DU = 0; //关闭段选P0 = table[Value/100]; //数码管显示百位DU = 1; //打开段选DU = 0; //关闭段选WE = 0; //关闭位选P0 = T_COM[0]; //第一位数码管WE = 1; //打开位选WE = 0; //关闭位选Delay_Ms(3);
//-------------------------------DU = 0;P0 = table[Value%100/10]|0x80; //显示十位DU = 1;DU = 0;WE = 0;P0 = T_COM[1]; //第二位数码管WE = 1;WE = 0;Delay_Ms(3);
//-------------------------------DU = 0;P0 = table[Value%10]; //显示个位DU = 1;DU = 0;WE = 0;P0 = T_COM[2]; //第三位数码管WE = 1;WE = 0;Delay_Ms(3);
}
/*单总线初始化时序*/
bit ds_init()
{bit i;DS = 1;_nop_();DS = 0;Delay_us(75); //拉低总线499.45us 挂接在总线上的18B20将会全部被复位DS = 1; //释放总线Delay_us(4); //延时37.95us 等待18B20发回存在信号i = DS;Delay_us(20); //141.95usDS = 1;_nop_();return (i);
}
/*写一个字节*/
void write_byte(uchar dat)
{uchar i;for(i=0;i<8;i++){DS = 0;_nop_();//产生些时序DS = dat & 0x01;Delay_us(10);//76.95usDS = 1; //释放总线准备下一次数据写入_nop_();dat >>= 1;}
}uchar read_byte()
{uchar i, j, dat;for(i=0;i<8;i++){DS = 0;_nop_();//产生读时序DS = 1;_nop_();//释放总线j = DS;Delay_us(10);//76.95usDS = 1;_nop_();dat = (j<<7)|(dat>>1); }return (dat);
}
void main()
{uint i;uchar L, M;
/* ds_init();//初始化DS18B20write_byte(0xcc);//发送跳跃ROM指令write_byte(0x4e);//写暂存器指令write_byte(0x7f);write_byte(0xf7);write_byte(0x1f);//配置工作在9位模式下ds_init();//初始化DS18B20write_byte(0xcc);//发送跳跃ROM指令 write_byte(0x48);*/while(1){ds_init();//初始化DS18B20write_byte(0xcc);//发送跳跃ROM指令write_byte(0x44);//发送温度转换指令ds_init();//初始化DS18B20write_byte(0xcc);//发送跳跃ROM指令write_byte(0xbe);//读取DS18B20暂存器值L = read_byte();M = read_byte();i = M;i <<= 8;i |= L; i = i * 0.0625 * 10 + 0.5;Display(i);}
}2、51单片机(LCD1602液晶显示)
#include <reg52.H>
#include <intrins.H>
#include <math.H>#define uchar unsigned char#define uint unsigned intsbit dula = P2^6;sbit wela = P2^7;sbit rw = P3^6; sbit RS = P3^5; sbit LCDEN = P3^4; void delayUs()
{_nop_();
}void delayMs(uint a)
{uint i, j;for(i = a; i > 0; i--)for(j = 100; j > 0; j--);}void writeComm(uchar comm)
{RS = 0; P0 = comm;LCDEN = 1;delayUs();LCDEN = 0;delayMs(1);
}//写数据:RS=1, RW=0;
void writeData(uchar dat)
{RS = 1;P0 = dat;LCDEN = 1;delayUs();LCDEN = 0;delayMs(1);}void init(){rw = 0; dula = wela = 0;writeComm(0x38);writeComm(0x0c); writeComm(0x06);writeComm(0x01);
}void writeString(uchar * str, uchar length)
{uchar i;for(i = 0; i < length; i++){writeData(str[i]);}}/**//*****************************DS18B20*******************************/sbit ds = P2^2;
void dsInit(){unsigned int i; ds = 0;i = 100; while(i>0) i--;ds = 1; i = 4;while(i>0) i--;}void dsWait(){unsigned int i;while(ds); while(~ds);i = 4;while(i > 0) i--;
}bit readBit()
{unsigned int i;bit b;ds = 0;i++; ds = 1; i++; i++; b = ds;i = 8; while(i>0) i--;return b;
}unsigned char readByte()
{unsigned int i;unsigned char j, dat;dat = 0;for(i=0; i<8; i++){j = readBit();dat = (j << 7) | (dat >> 1);}return dat;
}void writeByte(unsigned char dat)
{unsigned int i;unsigned char j;bit b;for(j = 0; j < 8; j++){b = dat & 0x01;dat >>= 1;if(b) {ds = 0; i++; i++; ds = 1; i = 8; while(i>0) i--; }else {ds = 0;i = 8; while(i>0) i--; ds = 1;i++; i++;}}
}void sendChangeCmd()
{dsInit(); dsWait(); delayMs(1); writeByte(0xcc);writeByte(0x44);
}void sendReadCmd()
{dsInit();dsWait();delayMs(1);writeByte(0xcc); writeByte(0xbe);
}int getTmpValue()
{unsigned int tmpvalue;int value; float t;unsigned char low, high;sendReadCmd();low = readByte(); high = readByte();tmpvalue = high;tmpvalue <<= 8;tmpvalue |= low;value = tmpvalue;\t = value * 0.0625;\value = t * 100 + (value > 0 ? 0.5 : -0.5); //大于0加0.5, 小于0减0.5return value;
}void display(int v)
{unsigned char count;unsigned char datas[] = {0, 0, 0, 0, 0};unsigned int tmp = abs(v);datas[0] = tmp / 10000;datas[1] = tmp % 10000 / 1000;datas[2] = tmp % 1000 / 100;datas[3] = tmp % 100 / 10;datas[4] = tmp % 10;writeComm(0xc0+3);if(v < 0){writeString("- ", 2);}else{writeString("+ ", 2);}if(datas[0] != 0){writeData('0'+datas[0]);}for(count = 1; count != 5; count++){writeData('0'+datas[count]);if(count == 2){writeData('.');}}
}
/**//*****************************DS18B20*******************************/void main()
{uchar table[] = " xianzaiwendu: ";sendChangeCmd();init();writeComm(0x80);writeString(table, 16);while(1){delayMs(1000); //温度转换时间需要750ms以上writeComm(0xc0);display(getTmpValue());sendChangeCmd();}
}
3、STM32
#include "stm32f4xx_hal.h"// DS18B20引脚定义
#define DS18B20_GPIO_PORT GPIOA
#define DS18B20_GPIO_PIN GPIO_PIN_0// 定义DS18B20相关命令
#define DS18B20_CMD_SKIP_ROM 0xCC
#define DS18B20_CMD_CONVERT_T 0x44
#define DS18B20_CMD_READ_SCRATCHPAD 0xBE// 函数声明
void DS18B20_DelayUs(uint32_t us);
void DS18B20_Init(void);
uint8_t DS18B20_Reset(void);
void DS18B20_WriteByte(uint8_t byte);
uint8_t DS18B20_ReadByte(void);
float DS18B20_GetTemperature(void);int main(void)
{// 初始化HAL库HAL_Init();// 初始化GPIO引脚__HAL_RCC_GPIOA_CLK_ENABLE();GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.Pin = DS18B20_GPIO_PIN;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;GPIO_InitStruct.Pull = GPIO_PULLUP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(DS18B20_GPIO_PORT, &GPIO_InitStruct);while (1){// 测量温度并输出结果float temperature = DS18B20_GetTemperature();printf("Temperature: %.2f°C\r\n", temperature);// 延时一段时间HAL_Delay(1000);}
}// 微秒级延时函数
void DS18B20_DelayUs(uint32_t us)
{uint32_t ticks = us * (SystemCoreClock / 1000000) / 3;while (ticks--){__NOP();}
}// 初始化DS18B20
void DS18B20_Init(void)
{// 复位DS18B20DS18B20_Reset();// 发送跳过ROM命令DS18B20_WriteByte(DS18B20_CMD_SKIP_ROM);
}// 复位DS18B20并检测设备存在
uint8_t DS18B20_Reset(void)
{uint8_t presence = 0;// 拉低总线HAL_GPIO_WritePin(DS18B20_GPIO_PORT, DS18B20_GPIO_PIN, GPIO_PIN_RESET);DS18B20_DelayUs(480);// 释放总线HAL_GPIO_WritePin(DS18B20_GPIO_PORT, DS18B20_GPIO_PIN, GPIO_PIN_SET);DS18B20_DelayUs(60);// 检测DS18B20响应presence = HAL_GPIO_ReadPin(DS18B20_GPIO_PORT, DS18B20_GPIO_PIN);DS18B20_DelayUs(420);return presence;
}// 发送一个字节给DS18B20
void DS18B20_WriteByte(uint8_t byte)
{for (uint8_t i = 0; i < 8; i++){// 发送低位HAL_GPIO_WritePin(DS18B20_GPIO_PORT, DS18B20_GPIO_PIN, GPIO_PIN_RESET);DS18B20_DelayUs(2);// 发送高位,根据byte的第i位来决定if (byte & (1 << i)){HAL_GPIO_WritePin(DS18B20_GPIO_PORT, DS18B20_GPIO_PIN, GPIO_PIN_SET);}DS18B20_DelayUs(60);// 释放总线HAL_GPIO_WritePin(DS18B20_GPIO_PORT, DS18B20_GPIO_PIN, GPIO_PIN_SET);}
}// 从DS18B20读取一个字节
uint8_t DS18B20_ReadByte(void)
{uint8_t byte = 0;for (uint8_t i = 0; i < 8; i++){// 发送低位HAL_GPIO_WritePin(DS18B20_GPIO_PORT, DS18B20_GPIO_PIN, GPIO_PIN_RESET);DS18B20_DelayUs(2);// 释放总线HAL_GPIO_WritePin(DS18B20_GPIO_PORT, DS18B20_GPIO_PIN, GPIO_PIN_SET);DS18B20_DelayUs(8);// 读取高位数据if (HAL_GPIO_ReadPin(DS18B20_GPIO_PORT, DS18B20_GPIO_PIN)){byte |= (1 << i);}DS18B20_DelayUs(50);}return byte;
}// 读取DS18B20温度
float DS18B20_GetTemperature(void)
{DS18B20_Init();// 发送温度转换命令DS18B20_WriteByte(DS18B20_CMD_CONVERT_T);// 等待转换完成HAL_Delay(800);// 复位DS18B20并跳过ROMDS18B20_Init();// 发送读取寄存器命令DS18B20_WriteByte(DS18B20_CMD_READ_SCRATCHPAD);// 读取温度数据uint8_t tempLow = DS18B20_ReadByte();uint8_t tempHigh = DS18B20_ReadByte();// 计算温度值int16_t temp = (tempHigh << 8) | tempLow;float temperature = (float)temp / 16.0f;return temperature;
}
相关文章:
DS18B20的原理及实例代码(51单片机、STM32单片机)
一、DS18B20介绍 DS18B20数字温度传感器是DALLAS公司生产的单总线器件,用它来组成一个测温系统具有线路简单,体积小,在一根通信线上可以挂很多这样的数字温度传感器,十分方便。 温度传感器种类众多,应用在高精度、高可…...

两种单例模式
1.单例模式分为两种,饿汉模式和懒汉模式.以下是饿汉模式: public class SingleTonHungry {private static SingleTonHungry singleTonHungry new SingleTonHungry();private SingleTonHungry() {}public static SingleTonHungry getInstance() {return singleTonHungry;} }2.…...

List中交集的使用
前言 新增了一个需求,需要将所有药品和对应数量库存的药房查询出来,要求:‘所有药品该药房都要有,并且库存大于购药数量’; 这就得考虑一个问题,有的药房有该药品,有的药房没有该药品…...

TypeScript基础篇 - TS的函数
目录 构造函数表达 泛型和函数 泛型函数 Contextual Typing【上下文映射,上下文类型】 泛型约束 手动指定类型 泛型的使用规范 对比 可选参数 思考:onClick中e的设计 函数重载 修改办法 操作符重载 THIS void【空返回值】 思考为什么这样…...
Vue项目如何生成树形目录结构
文章底部有个人公众号:热爱技术的小郑。主要分享开发知识、有兴趣的可以关注一手。 前言 项目的目录结构清晰、可以帮助我们更快理顺项目的整体构成。在写文档之类的时候也比较方便。生成树形目录的方式有多种,我这里简单介绍其中一种较为简单的实现 过…...
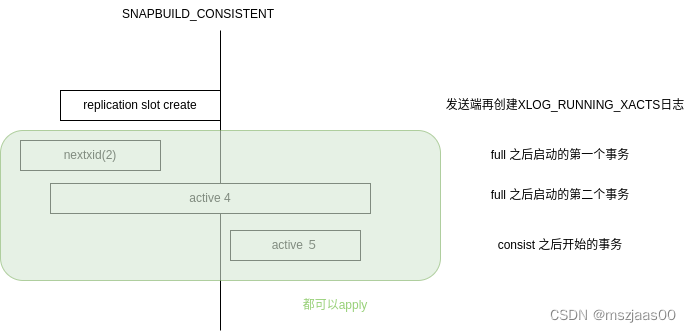
postgresql四种逻辑复制的状态
准备 CreateCheckpoint,或者bgwriter启动时,或者创建logicalreplicationslot时都会调用LogStandbySnapshot 记录一个XLOG_RUNNING_XACTS类型的日志。日志中记录了所有提交的事务的xid(HistoricSnapshot) 启动(SNAPBUILD_BUILDING_SNAPSHOT&…...
梯度下降法和牛顿法
梯度下降法和牛顿法都是优化方法。 梯度下降法 梯度下降法和相关知识可以参考导数、偏导数、梯度、方向导数、梯度下降、二阶导数、二阶方向导数一文。梯度下降法是一种迭代地每次沿着与梯度相反方向前进的不断降低损失函数的优化方法。梯度下降只用到一阶导数的信息…...
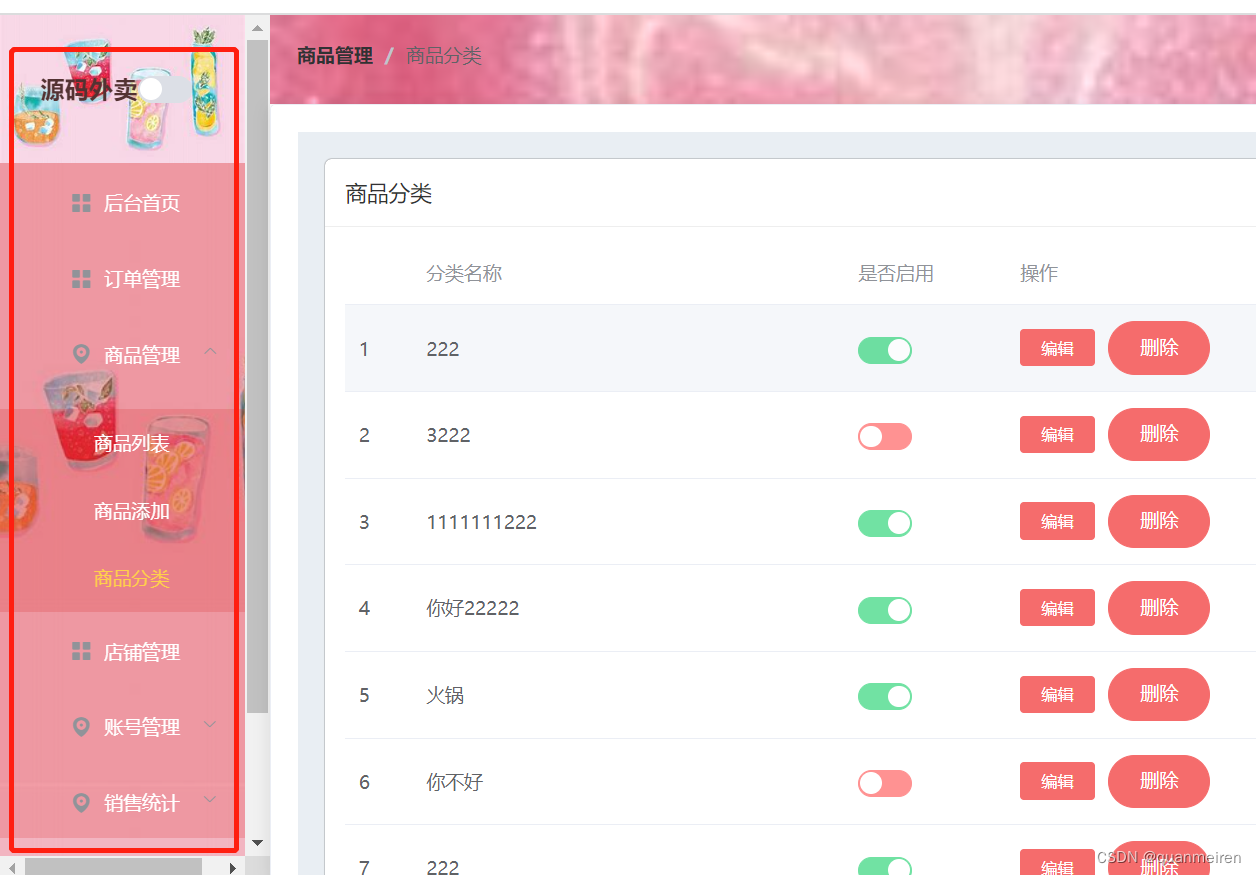
elment-ui的侧边栏 开关及窗口联动
<template><div class"asders"><el-aside width"200px"><div class"boxbody"><div>源码外卖</div><el-switch v-model"isCollapse" :active-value"true" :inactive-value"fals…...

【从零开始学习JAVA | 第三十二篇】 异常(下)新手必学!
目录 前言: Exceptions(异常): 异常的两大作用: 异常的处理方式: 1.JVM默认处理 2.自己捕获异常 3.抛出处理 自定义异常: 异常的优点: 总结: 前言: 前…...

onnxruntime (C++/CUDA) 编译安装
一、克隆及编译 git clone --recursive https://github.com/Microsoft/onnxruntime cd onnxruntime/ git checkout v1.8.0如果克隆的时候报错: 执行以下: apt-get install gnutls-bin git config --global http.sslVerify false git config --global h…...

第三篇-Tesla P40+CentOS-7+CUDA 11.7 部署实践
第一篇-ChatGLM-webui-Windows安装部署-CPU版 第二篇-二手工作站配置 第三篇-Tesla P40CentOS-7CUDA 11.7 部署实践 硬件环境 系统:CentOS-7 CPU: 14C28T 显卡:Tesla P40 24G 准备安装 驱动: 515 CUDA: 11.7 cuDNN: 8.9.2.26 安装依赖 yum clean al…...

Unity游戏源码分享-ARPG游戏Darklight.rar
Unity游戏源码分享-ARPG游戏Darklight.rar 玩法 项目地址:https://download.csdn.net/download/Highning0007/88105464...

类型转换运算符
当我们想要将自定义类的对象转换为目标类型时,我们可以通过重载类型转换运算符(conversion operator)来实现。 以下是一个示例代码,展示了如何在 C 中定义一个自定义类,并重载类型转换运算符将对象转换为目标类型&…...

Kafka 入门到起飞系列 - 消费者组管理、位移管理
消费者组 - Consumer Group 上文我们已经讲过消费者组了,我们知道消费组的存在可以保证一个主题下一个分区的消息只会被组内一个消费者消费,从而避免了消息的重复消费 什么是消费组 - Consumer Group? 消费者组是Kafka 提供的可扩展且具有容…...

SpringBoot——数据层三组件之间的关系
简单介绍 在之前的文章中,我们介绍了一下SpringBoot中内置的几种数据层的解决方案,在数据层由三部分组成,分别是数据库,持久化技术以及数据源,但是我今天写着写着,突然就想不起来这三部分到底是干什么的了…...
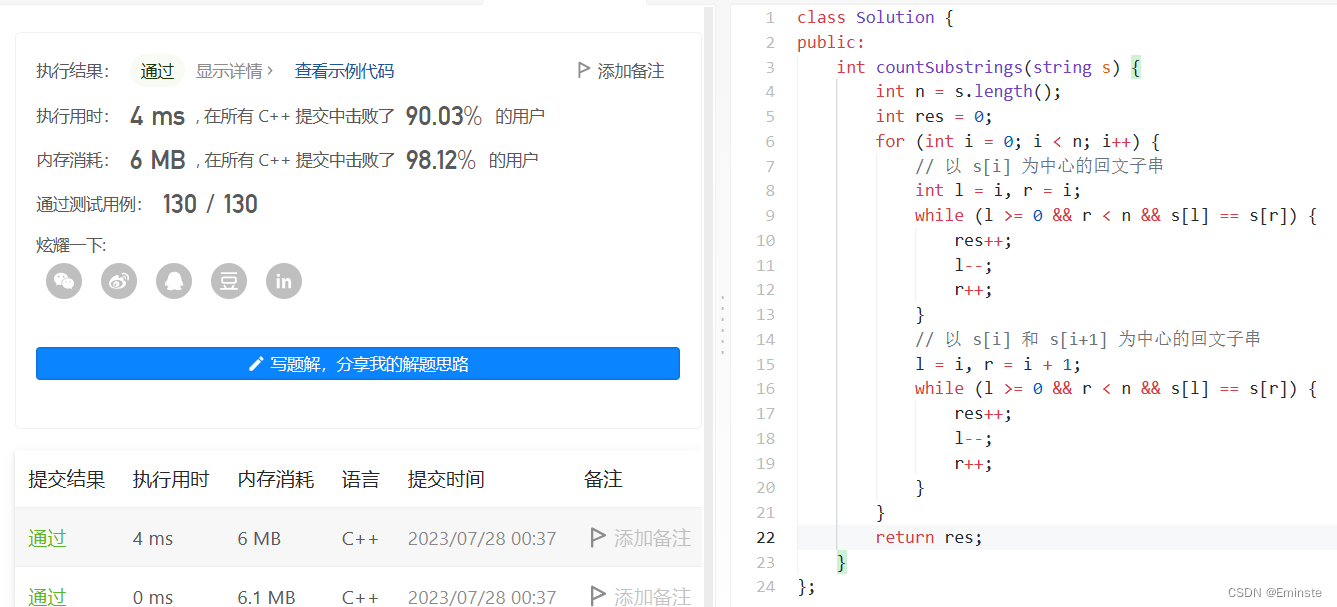
LeetCode647.Palindromic-Substrings<回文子串>
题目: 思路: 错误代码:(缺少部分判断) 使用的是寻找回文子串的方法。以一个点为中心向两边扫描。但是有一点小问题。 因为回文子串是分奇偶的,所以需要两种判断方式。 看了下答案后发现我的代码距离答案一…...

React的hooks---useContext
Context 提供了一个无需为每层组件手动添加 props ,就能在组件树间进行数据传递的方法,useContext 用于函数组件中订阅上层 context 的变更,可以获取上层 context 传递的 value prop 值 useContext 接收一个 context 对象(React.…...
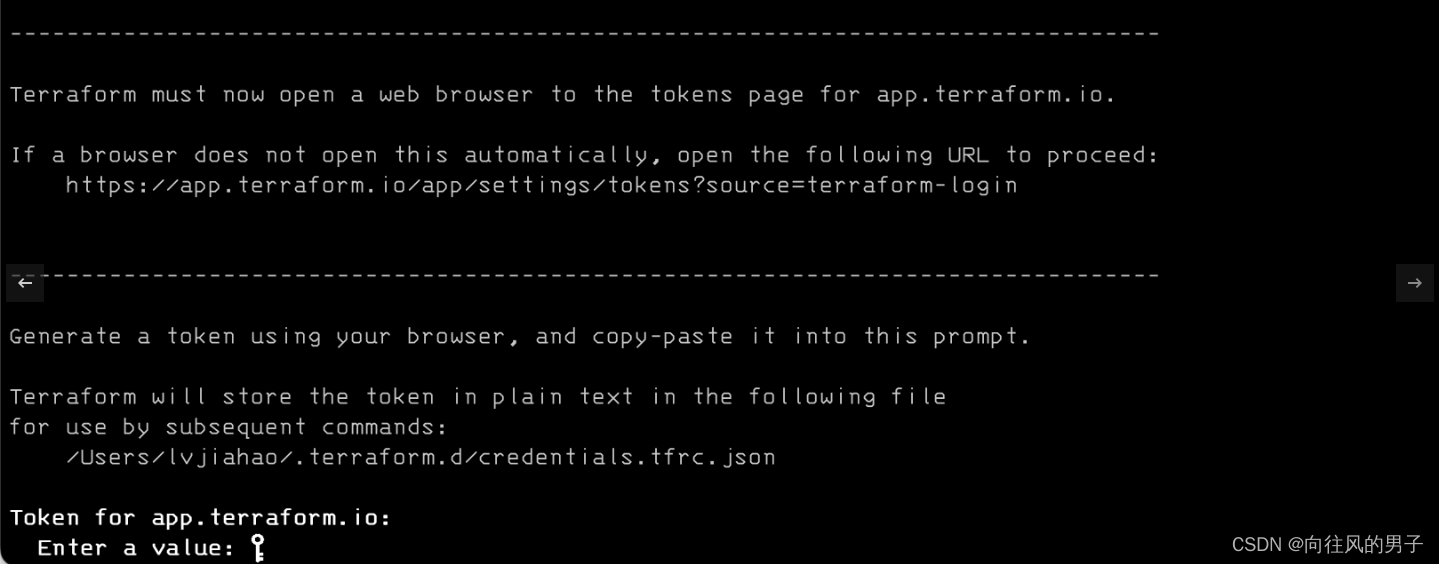
【Terraform学习】TerraformCloud入门介绍(快速入门)
TerraformCloud入门介绍 什么是 TerraformCloud? Terraform Cloud是Hashicorp Terraform的SaaS版本。 免费版功能 免费版功能包括版本控制集成、远程计划和实施远程计划和实施、通知及webhook、全http API驱动、状态管理、模拟计划、私有化模块注册器以及全HTTP界…...

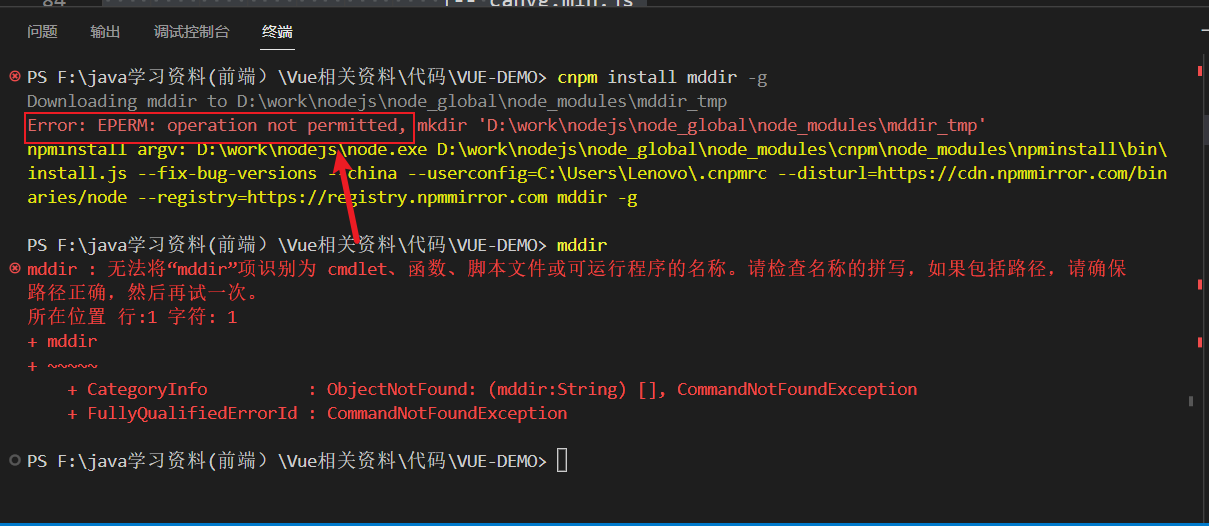
linux实现运行java分包部署
1.打好包之后 找到bin文件夹下的 startup.sh文件 2.cd 进入bin文件夹下 3.执行 sh startup.sh 运行命令 4.如果出现此错误 是Windows和Linux的.sh脚本文件格式不同,如果在脚本中有空行,脚本是在Windows下进行编辑之后上传到linux上去执行的话,…...

数据安全之全景图系列——数据分类分级落地实践
1、数据分类分级现状 我们正处于一个数据爆炸式增长的时代,随着产业数字化转型升级的推进,数据已被国家层面纳入生产要素,并且成为企业、社会和国家层面重要的战略资源。数据分类分级管理不仅是加强数据交换共享、提升数据资源价值的前提条件…...
)
从测速到配置:一套完整的cFosSpeed网络加速保姆级教程(适用于小白)
从零开始掌握cFosSpeed:网络加速全流程实战指南对于经常进行在线游戏、视频会议或大文件传输的用户来说,网络延迟和带宽利用率低下往往是影响体验的关键痛点。cFosSpeed作为一款专业的网络流量优化工具,能够显著改善这些问题,但许…...

2026 西安 AI 问答曝光搭建技术解析:GEO 知识图谱 + 深度测评
随着大语言模型技术的快速普及,AI 搜索已经成为用户获取企业信息、商家服务的核心入口。根据中国互联网信息中心 2026 年发布的《中国人工智能搜索发展报告》显示,2025 年国内 AI 搜索用户规模突破 8.2 亿,日均搜索请求超过 20 亿次ÿ…...

智慧无人机巡检-无人机可见光红外数据集 无人机多模态检测数据集 红外与可见光检测数据集
智慧无人机巡检-无人机可见光红外数据集,已完成标注,可导出各种常用数据集,yolo,voc,coco等格式。可见光33000张,红外16100张,目标一张一个 无人机可见光红外目标数据集项目详细信息数据集名称无…...

照着用就行:2026 最新降AIGC软件测评与推荐
2026年真正好用的AI论文降重与改写工具,核心看降重效果、去AI味、格式保留、学术适配四大指标。综合实测,千笔AI、ThouPen、豆包、DeepSeek、Grammarly 是当前最值得推荐的梯队,覆盖从免费到付费、从中文到英文、从文科到理工的全场景需求。 …...

账务台账数据
银行里说的 “账务台账数据”,本质就是按会计规则把每笔业务逐笔、分户、分科目记下来的完整明细流水 余额 辅助信息,核心是 “可逐笔追溯、可对账、可审计” 的一套明细数据。下面用通俗、具体的方式拆开说:一、银行 “账务台账” 到底是什…...

深度解析网络设备权限管理工具:中兴光猫工厂模式与Telnet服务完整指南
深度解析网络设备权限管理工具:中兴光猫工厂模式与Telnet服务完整指南 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 在当今网络设备管理领域,获取设备完整控制…...

同步带装配工艺要点与损伤防控策略
一、引言在工业精密传动系统中,盖茨同步带凭借高精度、高效率、无滑差的优势,成为自动化设备、精密机床、输送产线的核心传动部件。多数企业在运维中,普遍将同步带异常磨损、断齿、断带等故障归咎于工况恶劣或产品质量问题,却忽略…...

如何快速解锁艾尔登法环帧率限制:终极性能优化指南
如何快速解锁艾尔登法环帧率限制:终极性能优化指南 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirrors/el/EldenR…...

具身智能:面向新兴交叉学科建设的思考与建议 2026
这份由 CCF YOCSEF 长三角五地学术委员会 2026 年 5 月发布的白皮书,聚焦具身智能作为新兴交叉学科的建设,明确其并非 AI 与机器人学的简单拼接,而是围绕物理交互中的智能行为形成的新问题域,提出 “三大基本问题 一个应用需求”…...

特定任务需求场景下的过约束并联机构构型设计与控制方法【附代码】
✨ 长期致力于曲面加工、构型综合、运动学和动力学建模、性能评价、多目标优化、滑模控制、鲁棒控制、视觉传感技术研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (…...