【matlab】机器人工具箱快速上手-正运动学仿真(代码直接复制可用)
安装好机器人工具箱,代码复制可用,按需修改参数
1.建模
%%%%%%%%SCARA机器人仿真模型
l=[0.457 0.325];
L(1)= Link('d',0,'a',l(1),'alpha',0,'standard','qlim',[-130 130]*pi/180);%连杆1
L(2)=Link('d',0,'a',l(2),'alpha',pi,'standard','qlim',[-145 145]*pi/180);%连杆2
L(3)=Link('theta',0,'a',0,'alpha',0,'standard','qlim',[0 0.3]);%连杆3
L(4)= Link('d',0,'a',0,'alpha',0,'standard','qlim',[-360 360]*pi/180);%连杆4
scara=SerialLink(L,'name','SCARA Robot');%建立 SCARA 机器人模型
q0=[0 0 0 0];%初始关节变量
scara.plot(q0);%绘制机器人结构
scara.teach(q0);%驱动机器人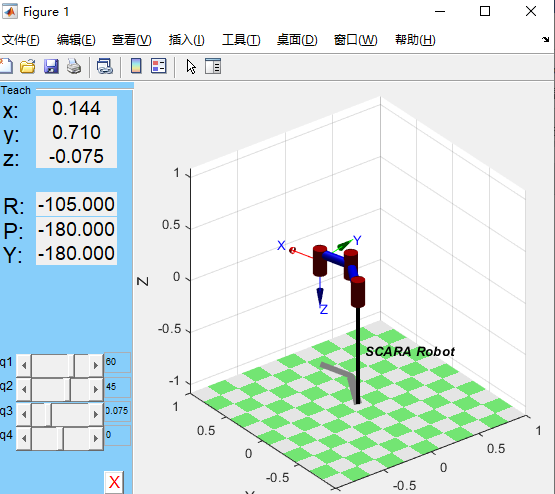
2.工作空间
%%%%%%%%工作空间绘制
qL=scara.qlim;%关节运动范围
N=10000;%随机数数量
ws_q=zeros(N,4);%定义N个关节变量向量组成的关节变量矩阵q
a=rand(size(ws_q)); %生成元素数值在0~1之间的与q同维度的随机矩阵for j=1:Nfor i=1:4ws_q(j,i)=qL(i,1)+(qL(i,2)-qL(i,1))*a(j,i);%给矩阵q赋q范围内的随机值,以得到足够多的给定范围(矩阵ql)内的机器人的关节变量(矩阵q)值end
end
%求机器人位置坐标
ws_x=l(1)*cos(ws_q(:,1))+l(2)*cos(ws_q(:,1)+ ws_q(:,2));%机器人末端x坐标值
ws_y=l(1)*sin(ws_q(:,1))+l(2)*sin(ws_q(:,1)+ws_q(:,2));%机器人末端了坐标值
ws_z=- ws_q(:,3);%机器人末端z坐标值
figure('Name','Scara机器人工作空间')
plot3(ws_x,ws_y,ws_z,'r.')
grid;
xlabel('x');
ylabel('y');
zlabel('z');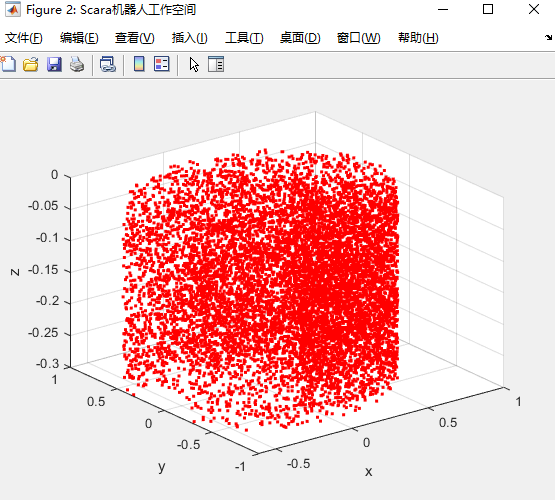
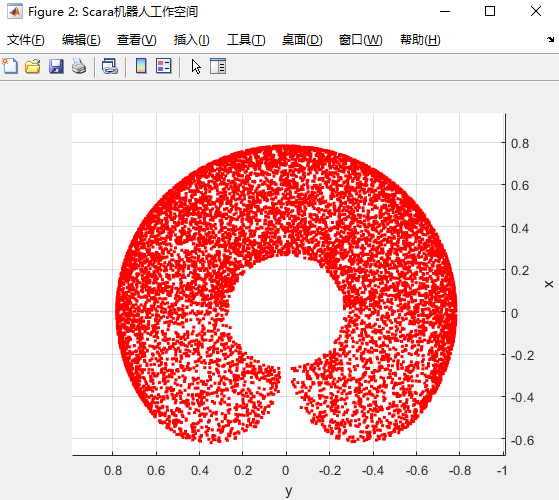
旋转一下:
3.运动轨迹:
%%%%%%%%轨迹规划
qA=[0 0 0 0];%起始点关节变量值
qB=[0.7 1.2 0.15 2];%终止点关节变量值
t=0:0.05:2;%产生时间向量
[q,qd,qdd]=jtraj(qA,qB,t);%jtraj()为构建轨迹命令,得到各关节的位移、速度和加速度
%%%%%%%%正运动学仿真
T=double(scara.fkine(q));%正运动学仿真函数
[x,y,z]=transl(T);%机器人末端x、y、z坐标值
%%%%%%%%绘制曲线图
figure('Name','"SCARA Robot"机器人正运动学演示');
plot(scara,q)
figure('Name','机器人末端运动轨迹')
plot3(x,y,z,'r-o','MarkerFaceColor','r');
grid;
xlabel('x');ylabel('y');zlabel('z');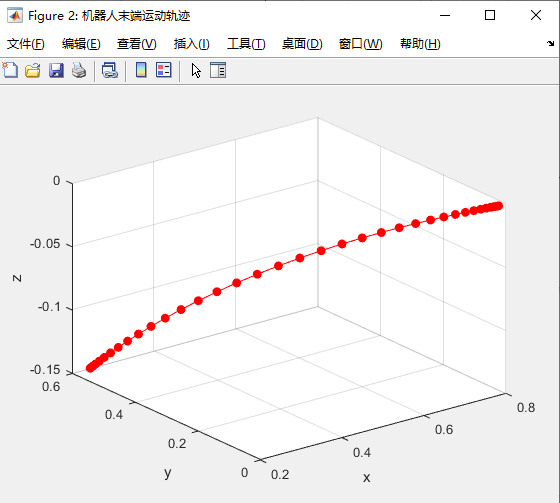
4.各关节位移、速度、加速度:
figure('Name','各关节的位移、速度和加速度曲线');
subplot(3,4,1);
plot(t,q(:,1)); %得到关节1的位移曲线
title('关节1'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,5);
plot(t,qd(:,1)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,9);
plot(t,qdd(:,1)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');subplot(3,4,2);
plot(t,q(:,2)); %得到关节1的位移曲线
title('关节2'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,6);
plot(t,qd(:,2)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,10);
plot(t,qdd(:,2)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');subplot(3,4,3);
plot(t,q(:,3)); %得到关节1的位移曲线
title('关节3'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,7);
plot(t,qd(:,3)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,11);
plot(t,qdd(:,3)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');subplot(3,4,4);
plot(t,q(:,4)); %得到关节1的位移曲线
title('关节4'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,8);
plot(t,qd(:,4)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,12);
plot(t,qdd(:,4)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');
汇总:
%%%%%%%%SCARA机器人仿真模型
l=[0.457 0.325];
L(1)= Link('d',0,'a',l(1),'alpha',0,'standard','qlim',[-130 130]*pi/180);%连杆1
L(2)=Link('d',0,'a',l(2),'alpha',pi,'standard','qlim',[-145 145]*pi/180);%连杆2
L(3)=Link('theta',0,'a',0,'alpha',0,'standard','qlim',[0 0.3]);%连杆3
L(4)= Link('d',0,'a',0,'alpha',0,'standard','qlim',[-360 360]*pi/180);%连杆4
scara=SerialLink(L,'name','SCARA Robot');%建立 SCARA 机器人模型
q0=[0 0 0 0];%初始关节变量
scara.plot(q0);%绘制机器人结构
scara.teach(q0);%驱动机器人%%%%%%%%工作空间绘制
qL=scara.qlim;%关节运动范围
N=10000;%随机数数量
ws_q=zeros(N,4);%定义N个关节变量向量组成的关节变量矩阵q
a=rand(size(ws_q)); %生成元素数值在0~1之间的与q同维度的随机矩阵for j=1:Nfor i=1:4ws_q(j,i)=qL(i,1)+(qL(i,2)-qL(i,1))*a(j,i);%给矩阵q赋q范围内的随机值,以得到足够多的给定范围(矩阵ql)内的机器人的关节变量(矩阵q)值end
end
%求机器人位置坐标
ws_x=l(1)*cos(ws_q(:,1))+l(2)*cos(ws_q(:,1)+ ws_q(:,2));%机器人末端x坐标值
ws_y=l(1)*sin(ws_q(:,1))+l(2)*sin(ws_q(:,1)+ws_q(:,2));%机器人末端了坐标值
ws_z=- ws_q(:,3);%机器人末端z坐标值
figure('Name','Scara机器人工作空间')
plot3(ws_x,ws_y,ws_z,'r.')
grid;
xlabel('x');
ylabel('y');
zlabel('z');
%%%%%%%%轨迹规划
qA=[0 0 0 0];%起始点关节变量值
qB=[0.7 1.2 0.15 2];%终止点关节变量值
t=0:0.05:2;%产生时间向量
[q,qd,qdd]=jtraj(qA,qB,t);%jtraj()为构建轨迹命令,得到各关节的位移、速度和加速度
%%%%%%%%正运动学仿真
T=double(scara.fkine(q));%正运动学仿真函数
[x,y,z]=transl(T);%机器人末端x、y、z坐标值
%%%%%%%%绘制曲线图
figure('Name','"SCARA Robot"机器人正运动学演示');
plot(scara,q)
figure('Name','机器人末端运动轨迹')
plot3(x,y,z,'r-o','MarkerFaceColor','r');
grid;
xlabel('x');ylabel('y');zlabel('z');
figure('Name','各关节的位移、速度和加速度曲线');
subplot(3,4,1);
plot(t,q(:,1)); %得到关节1的位移曲线
title('关节1'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,5);
plot(t,qd(:,1)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,9);
plot(t,qdd(:,1)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');subplot(3,4,2);
plot(t,q(:,2)); %得到关节1的位移曲线
title('关节2'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,6);
plot(t,qd(:,2)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,10);
plot(t,qdd(:,2)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');subplot(3,4,3);
plot(t,q(:,3)); %得到关节1的位移曲线
title('关节3'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,7);
plot(t,qd(:,3)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,11);
plot(t,qdd(:,3)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');subplot(3,4,4);
plot(t,q(:,4)); %得到关节1的位移曲线
title('关节4'); %命名
grid;
hold on;
ylabel('位移(rad)');
subplot(3,4,8);
plot(t,qd(:,4)); %得到关节1的速度曲线
grid;
ylabel('速度(rad/s)');
subplot(3,4,12);
plot(t,qdd(:,4)); %得到关节1的加速度曲线
grid;
xlabel('时间(s)');
ylabel('加速度(rad/s^2)');相关文章:
【matlab】机器人工具箱快速上手-正运动学仿真(代码直接复制可用)
安装好机器人工具箱,代码复制可用,按需修改参数 1.建模 %%%%%%%%SCARA机器人仿真模型 l[0.457 0.325]; L(1) Link(d,0,a,l(1),alpha,0,standard,qlim,[-130 130]*pi/180);%连杆1 L(2)Link(d,0,a,l(2),alpha,pi,standard,qlim,[-145 145]*pi/180);%连杆…...
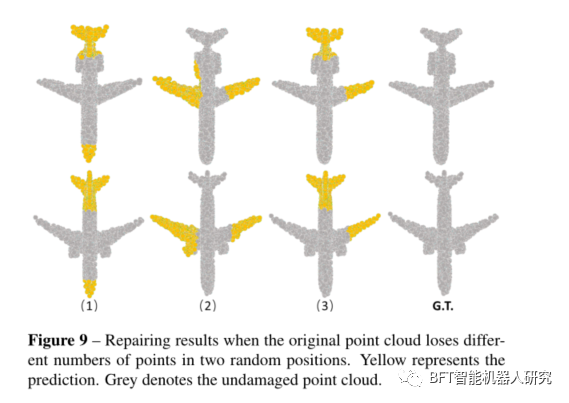
论文解读|PF-Net:用于 3D 点云补全的点分形网络
原创 | 文 BFT机器人 01 背景 从激光雷达等设备中获取的点云往往有所缺失(反光、遮挡等),这给点云的后续处理带来了一定的困难,也凸显出点云补全作为点云预处理方法的重要性。 点云补全(Point Cloud Completion&#x…...
网络安全(零基础)自学
一、网络安全基础知识 1.计算机基础知识 了解了计算机的硬件、软件、操作系统和网络结构等基础知识,可以帮助您更好地理解网络安全的概念和技术。 2.网络基础知识 了解了网络的结构、协议、服务和安全问题,可以帮助您更好地解决网络安全的原理和技术…...

Spring Security 身份验证的基本类/架构
目录 1、SecurityContextHolder 核心类 2、SecurityContext 接口 3、Authentication 用户认证信息接口 4、GrantedAuthority 拥有权限接口 5、AuthenticationManager 身份认证管理器接口 6、ProviderManager 身份认证管理器的实现 7、AuthenticationProvider 特定类型的…...
市值超300亿美金,SaaS独角兽Veeva如何讲好中国故事?
“全球前50的药企,有47家正在使用Veeva。” 提到Veeva Systems(以下简称“Veeva”),可能很多人并不熟悉。但是生命科学业内人士都知道,Veeva是全球头部的行业SaaS服务商。以“为生命科学行业构建行业云”为使命&#x…...

编译内联导致内存泄漏的问题定位修复
作者:0x264 问题 线上长时间存在一个跟异步 inflate 相关的量级较大的内存泄漏,如下所示: 第一次分析 从内存泄漏粗略看有几个信息: 被泄漏的Activity有很多,所以可能跟某个具体业务的关系不大引用链特别短…...

基于WebSocket实现的后台服务
基于WebSocket实现的后台服务,用于接收客户端的心跳消息,并根据心跳消息来维护客户端连接。 具体实现中,服务启动后会创建一个HttpListener对象,用于监听客户端的WebSocket连接请求。当客户端连接成功后,服务会为每个…...
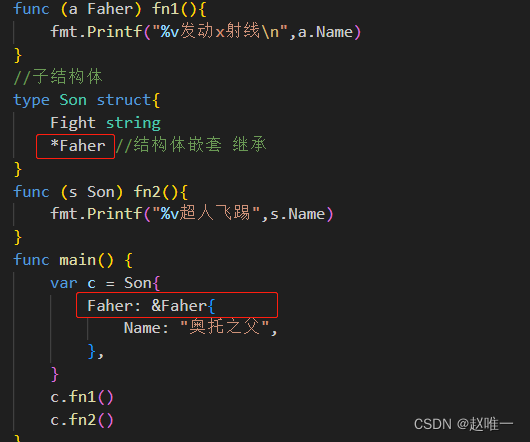
Go语言中的结构体详解
关于 Golang 结构体 Golang 中没有“类”的概念,Golang 中的结构体和其他语言中的类有点相似。和其他面向对 象语言中的类相比,Golang 中的结构体具有更高的扩展性和灵活性。 Golang 中的基础数据类型可以表示一些事物的基本属性,但是当我们…...
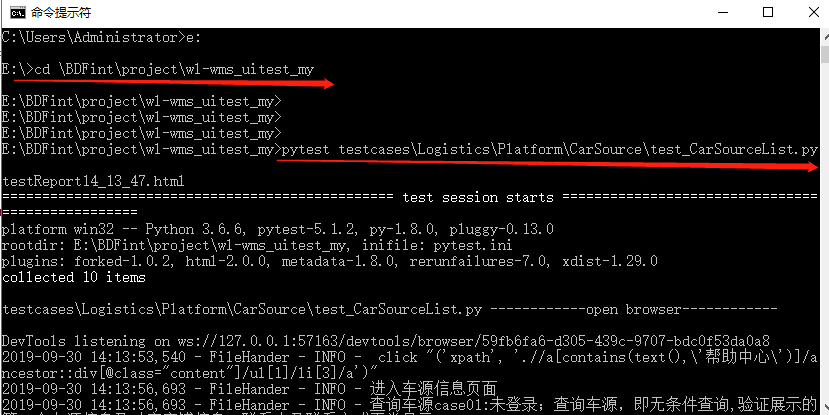
pytest自动化测试指定执行测试用例
1、在控制台执行 打开cmd,进入项目目录 指定执行某个模块 pytest testcases\Logistics\Platform\CarSource\test_CarSourceList.py 指定执行某个目录及其子目录的所有测试文件 pytest testcases\Logistics\Platform\CarSource 指定执行某个模块的某个类的某个测试用例 pyte…...

英伟达 H100 vs. 苹果M2,大模型训练,哪款性价比更高?
M1芯片 | Uitra | AMD | A100 M2芯片 | ARM | A800 | H100 关键词:M2芯片;Ultra;M1芯片;UltraFusion;ULTRAMAN;RTX4090、A800;A100;H100;LLAMA、LM、AIGC、CHATGLM、LLVM、LLM、LLM…...

var、let和const的区别
先简单了解一下 var声明的变量会挂载在window上,而let和const声明的变量不会: var a 100; console.log(a,window.a); // 100 100let b 10; console.log(b,window.b); // 10 undefinedconst c 1; console.log(c,window.c); // 1 undefined v…...
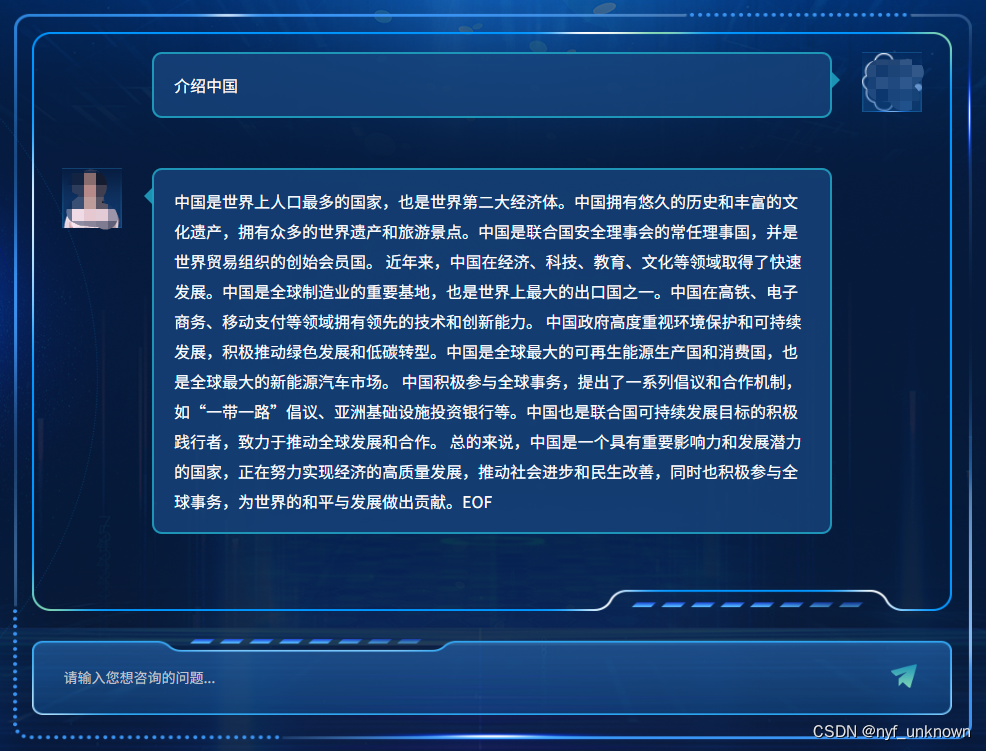
(css)AI智能问答页面布局
(css)AI智能问答页面布局 效果: html <!-- AI框 --><div class"chat-top"><div class"chat-main" ref"chatList"><div v-if"!chatList.length" class"no-message"><span>欢迎使…...
 函数)
【Pytorch学习】pytorch中的isinstance() 函数
描述 isinstance() 函数来判断一个对象是否是一个已知的类型,类似 type()。 isinstance() 与 type() 区别: type() 不会认为子类是一种父类类型,不考虑继承关系。 isinstance() 会认为子类是一种父类类型,考虑继承关系。 如果要判…...

(树) 剑指 Offer 07. 重建二叉树 ——【Leetcode每日一题】
❓剑指 Offer 07. 重建二叉树 难度:中等 输入某二叉树的 前序遍历 和 中序遍历 的结果,请构建该二叉树并返回其根节点。 假设输入的前序遍历和中序遍历的结果中都不含重复的数字。 示例 1: Input: preorder [3,9,20,15,7], inorder [9,3,15,20,7] …...
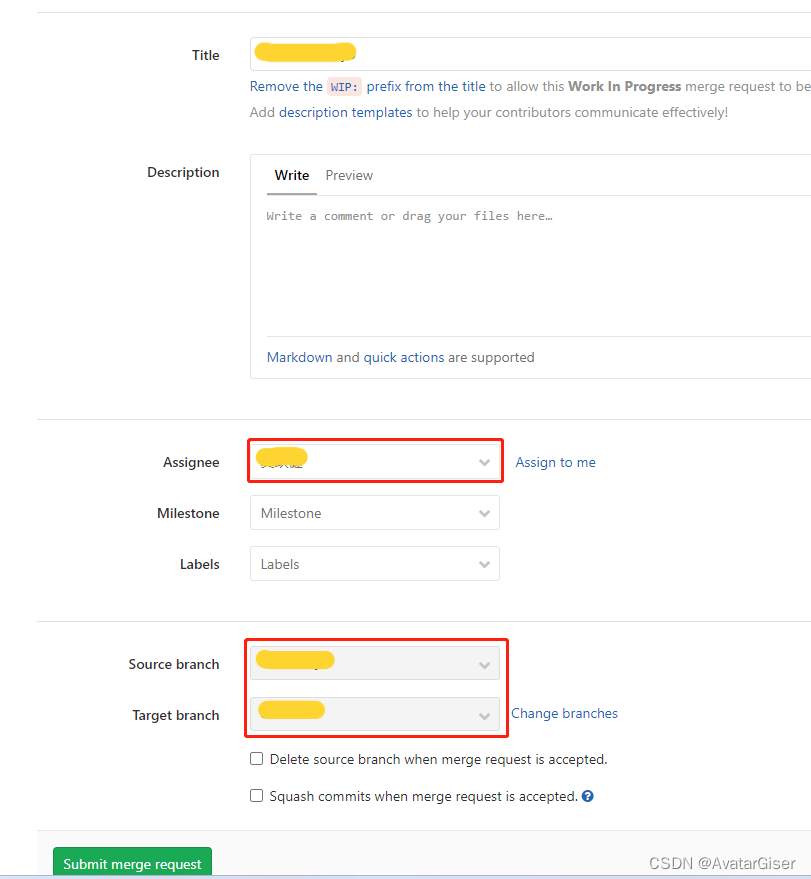
Gitlab 合并分支与请求合并
合并分支 方式一:图形界面 使用 GitGUI,右键菜单“GitExt Browse” - 菜单“命令” - 合并分支 方式二:命令行 在项目根目录下打开控制台,注意是本地 dev 与远程 master 的合并 // 1.查看本地分支,确认当前分支是否…...
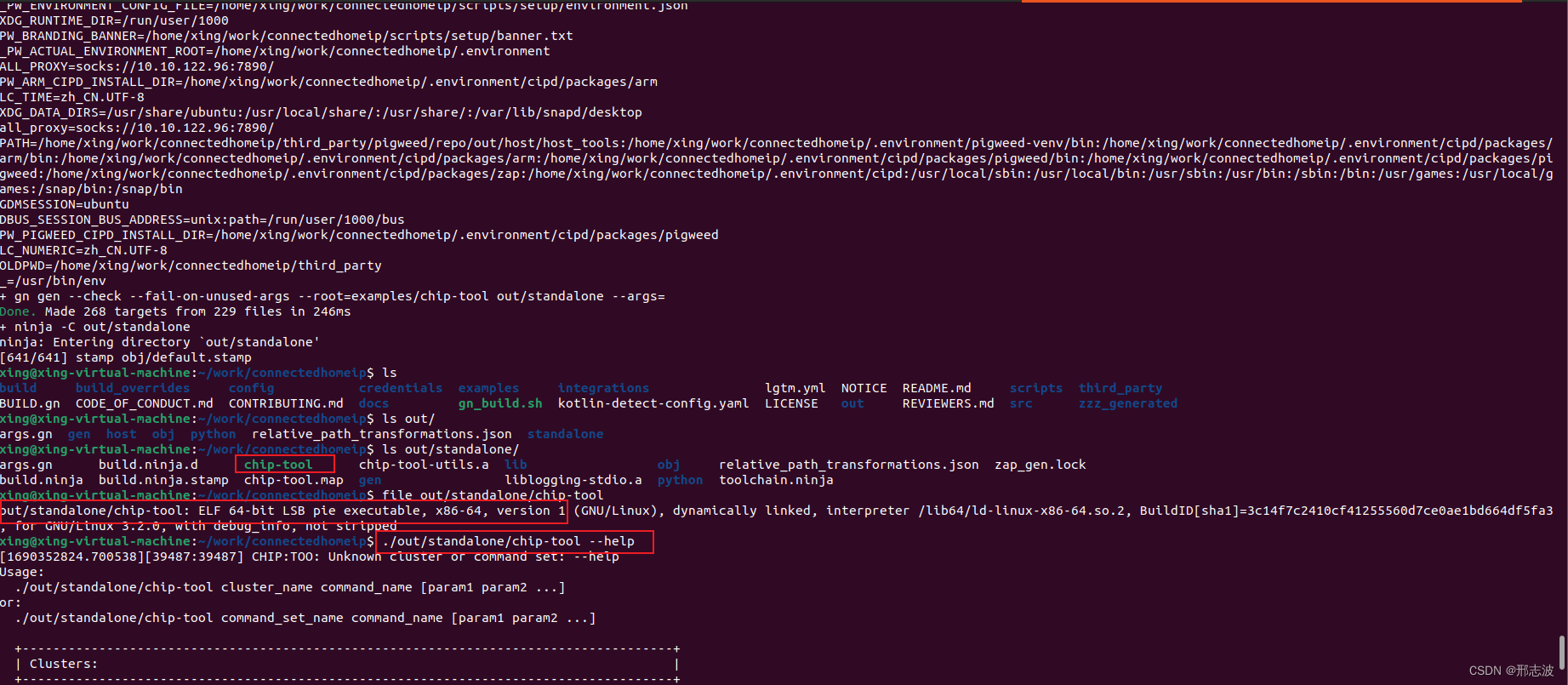
【Matter】基于Ubuntu 22.04 编译chip-tool工具
前言 编译过程有点曲折,做下记录,过程中,有参考别人写的博客,也看github 官方介绍,终于跑通了~ 环境说明: 首先需要稳定的梯子,可以访问“外网”ubuntu 环境,最终成功实验在Ubunt…...

将 MongoDB 的 List<Document> 转换为对象列表
当我们使用 MongoDB 存储数据时,经常会涉及到将 MongoDB 的文档对象转换为对象列表的需求。在 Java 中,我们可以使用 MongoDB 的 Java 驱动程序和自定义类来实现这一转换过程。 本篇博客将介绍如何将 MongoDB 中的 List<Document> 转换为对象列表。…...
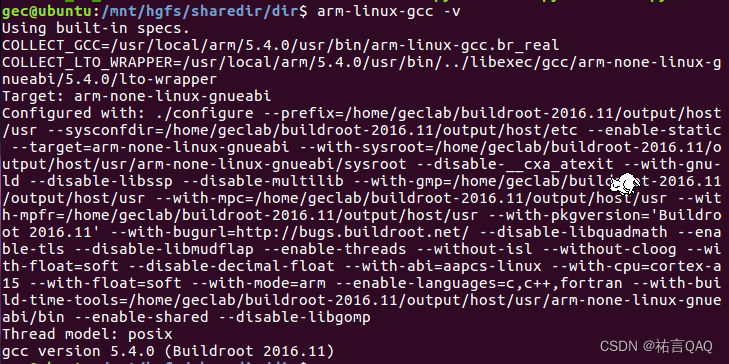
【Linux下6818开发板(ARM)】SecureCRT串口和交叉编译工具(巨细版!)
(꒪ꇴ꒪ ),hello我是祐言博客主页:C语言基础,Linux基础,软件配置领域博主🌍快上🚘,一起学习!送给读者的一句鸡汤🤔:集中起来的意志可以击穿顽石!作者水平很有限,如果发现错误&#x…...
应届生如何快速找Java开发工程师,先学会这17个基础问题
一、Java 基础 JDK 和 JRE 有什么区别? JDK:Java Development Kit 的简称,java 开发工具包,提供了 java 的开发环境和运行环境。 JRE:Java Runtime Environment 的简称,java 运行环境,为 java 的…...
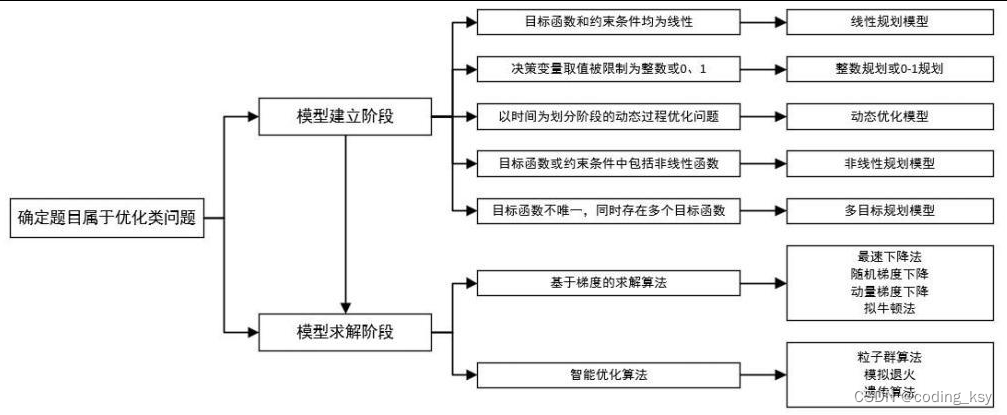
数学建模学习(5):数学建模各类题型及解题方案
一、数学建模常见的题型 总体来说,数学建模赛题类型主要分为:评价类、预测类和优化类三种,其中优化类是最常见的赛题类 型,几乎每年的地区赛或国赛美赛等均有出题,必须要掌握并且熟悉。 二、评价类赛题 综合评价是数学…...

Java开发者指南:CV_UNet图像着色模型集成实战
Java开发者指南:CV_UNet图像着色模型集成实战 1. 引言 作为一名Java开发者,你可能经常遇到需要处理图像着色的场景。比如老照片修复、黑白影像上色,或者给设计稿添加色彩。传统方法要么效果一般,要么需要深厚的技术背景。现在有…...

从信息收集到密码爆破:如何用DictGenerate定制你的专属社工字典?
从信息收集到密码爆破:如何用DictGenerate定制你的专属社工字典? 在授权渗透测试和安全评估中,社会工程学攻击往往是最难防御的一环。攻击者通过收集目标的个人信息,精心构造符合目标习惯的密码字典,能够显著提高暴力…...

PS CC 2019安装避坑指南:解决86%卡住和D3DCOMPILER_47.dll缺失问题
Photoshop CC 2019完整安装指南:从下载到故障排除 Photoshop CC 2019作为Adobe Creative Cloud系列中的重要版本,至今仍被许多设计师和摄影师所青睐。虽然Adobe已推出更新的版本,但2019版因其稳定性和适中的系统需求,依然是中低配…...

深入解析SSL/TLS握手协议:从理论到Wireshark实战分析
1. SSL/TLS协议的前世今生 每次在浏览器地址栏看到那个小锁图标,你有没有好奇过它背后是怎么工作的?这就是SSL/TLS协议在保护我们的数据安全。SSL(安全套接层)和它的继任者TLS(传输层安全)就像网络世界的&q…...

Xray漏洞扫描工具进阶实战:从配置优化到企业级部署
1. Xray工具深度调优:从基础配置到性能极限 第一次用Xray做全站扫描时,我盯着卡在63%的进度条整整两小时,直到发现是默认线程数把系统资源吃光了。这个教训让我意识到,会运行扫描和真正用好扫描工具完全是两回事。下面分享的调优方…...

FPGA程序部署双通道:JTAG在线调试与SPI Flash固化的工程实践
1. JTAG在线调试:工程师的"手术刀" 第一次用JTAG调试FPGA时,我盯着开发板看了半天——这玩意儿连上电脑就能直接改逻辑?后来才发现它就像给病人做手术时的实时监护仪,能随时观察"患者"状态,但断电…...

Linux 调度器中的限流机制:throttled 标志的触发与解除
一、简介在实时系统和云计算环境中,资源隔离与公平分配是 Linux 内核调度的核心挑战。当多个任务共享 CPU 资源时,某些恶意或失控的任务可能耗尽全部 CPU 时间,导致关键任务饥饿(Starvation)。为此,Linux 内…...

如何快速上手tuic:从零开始的安装与配置教程
如何快速上手tuic:从零开始的安装与配置教程 【免费下载链接】tuic 项目地址: https://gitcode.com/gh_mirrors/tu/tuic tuic是一款高效的GitHub加速工具,能够帮助用户解决GitHub访问速度慢、连接不稳定等问题,让开发者更流畅地获取G…...

PyTorch 2.5 + Jupyter 开发环境搭建:5分钟搞定AI模型训练与调试
PyTorch 2.5 Jupyter 开发环境搭建:5分钟搞定AI模型训练与调试 1. 环境准备与快速部署 PyTorch 2.5作为当前最流行的深度学习框架之一,其开箱即用的特性让AI开发变得前所未有的简单。我们将使用预配置好的PyTorch-CUDA基础镜像,快速搭建完…...

深度解析JiYuTrainer:极域电子教室反控制技术实现与架构设计
深度解析JiYuTrainer:极域电子教室反控制技术实现与架构设计 【免费下载链接】JiYuTrainer 极域电子教室防控制软件, StudenMain.exe 破解 项目地址: https://gitcode.com/gh_mirrors/ji/JiYuTrainer JiYuTrainer是一款专业的极域电子教室反控制软件…...