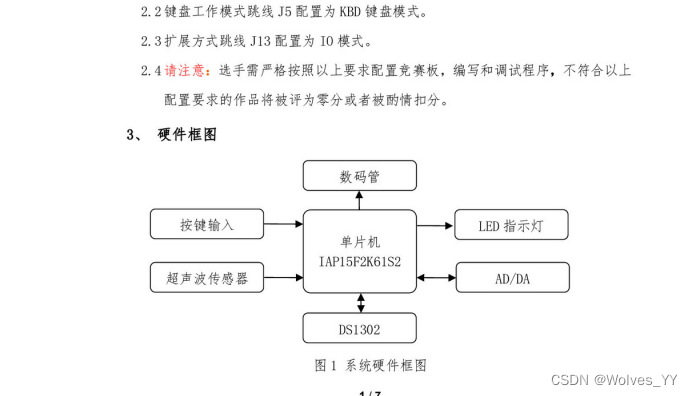
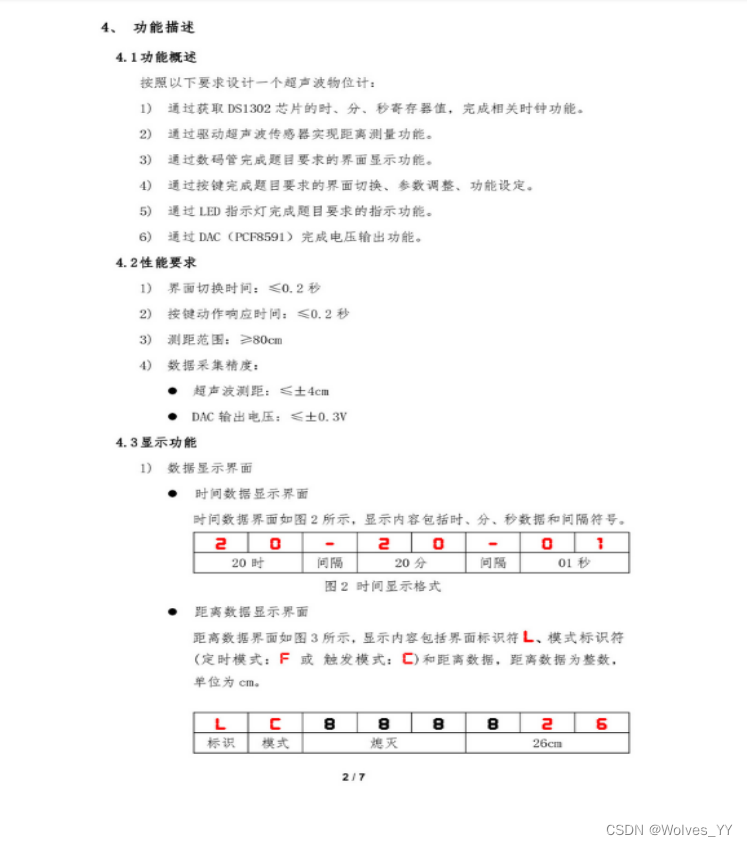
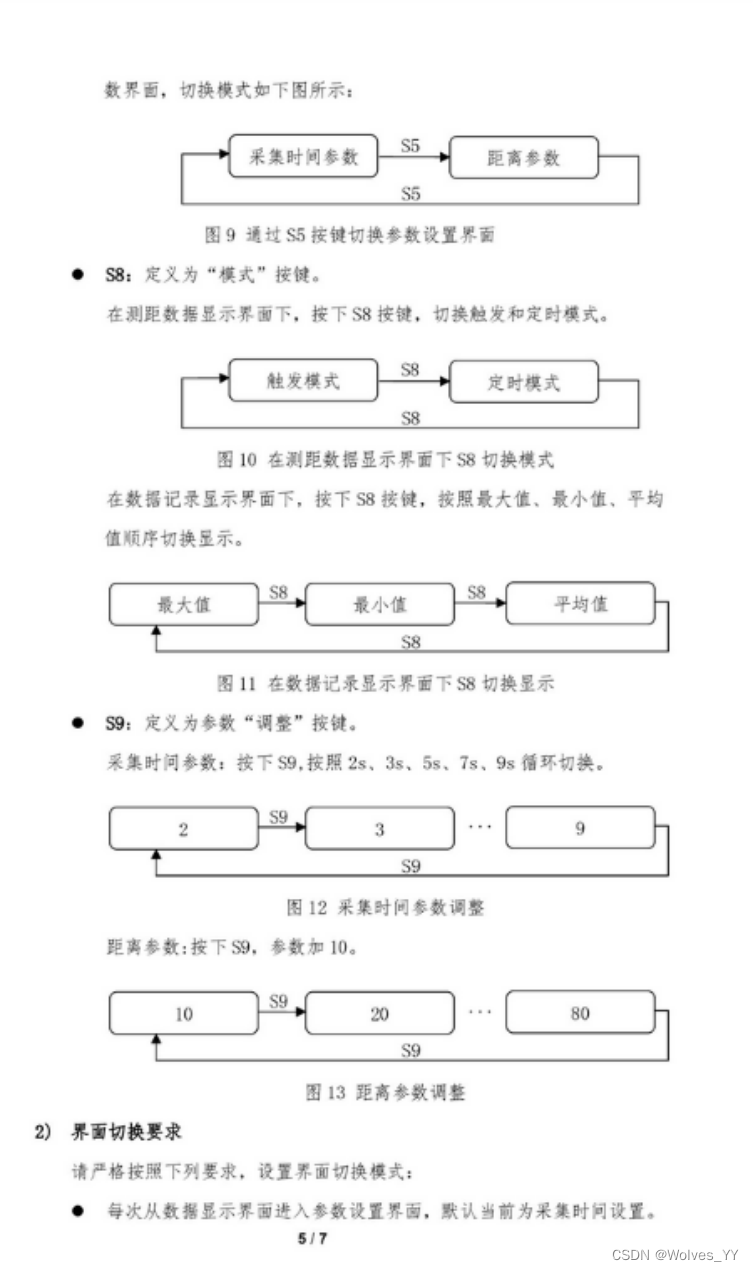
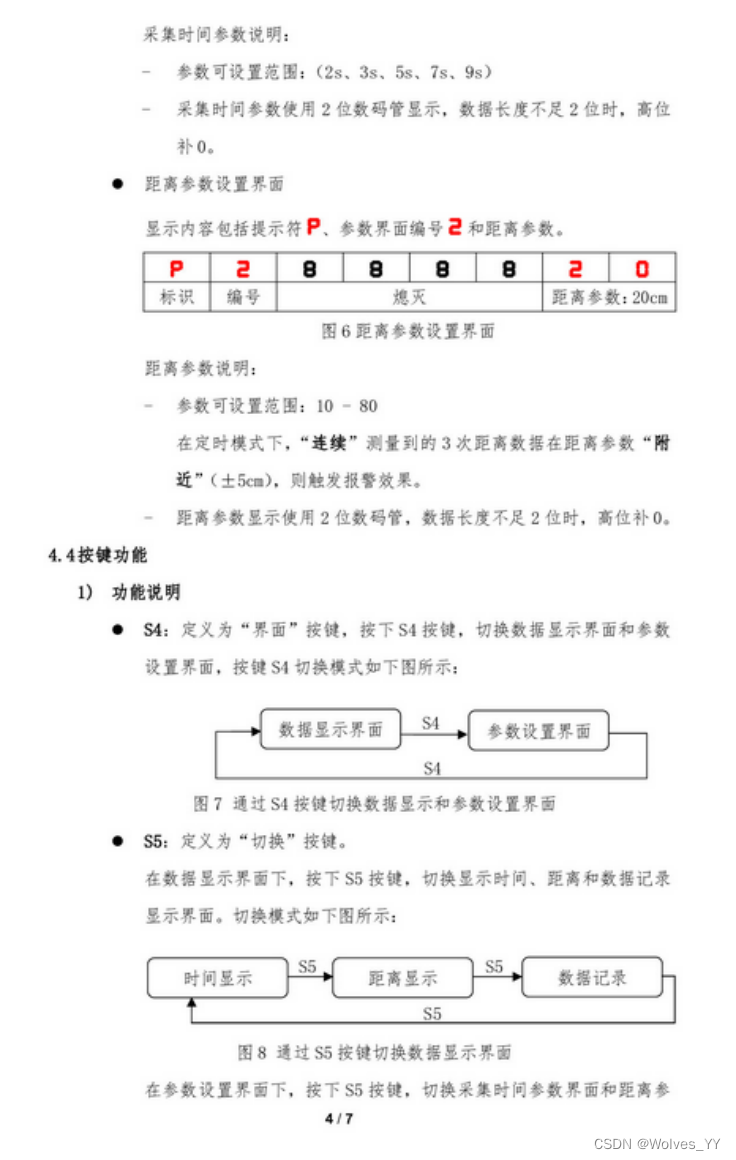
蓝桥杯单片机第十二届国赛 真题+代码

iic.c
/* # I2C代码片段说明1. 本文件夹中提供的驱动代码供参赛选手完成程序设计参考。2. 参赛选手可以自行编写相关代码或以该代码为基础,根据所选单片机类型、运行速度和试题中对单片机时钟频率的要求,进行代码调试和修改。
*/
#include <STC15F2K60S2.H>
#include "iic.h"
#include "intrins.h"sbit scl = P2^0;
sbit sda = P2^1;#define DELAY_TIME 5//
static void I2C_Delay(unsigned char n)
{do{_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_(); }while(n--);
}//
void I2CStart(void)
{sda = 1;scl = 1;I2C_Delay(DELAY_TIME);sda = 0;I2C_Delay(DELAY_TIME);scl = 0;
}//
void I2CStop(void)
{sda = 0;scl = 1;I2C_Delay(DELAY_TIME);sda = 1;I2C_Delay(DELAY_TIME);
}//
void I2CSendByte(unsigned char byt)
{unsigned char i;for(i=0; i<8; i++){scl = 0;I2C_Delay(DELAY_TIME);if(byt & 0x80){sda = 1;}else{sda = 0;}I2C_Delay(DELAY_TIME);scl = 1;byt <<= 1;I2C_Delay(DELAY_TIME);}scl = 0;
}//
unsigned char I2CReceiveByte(void)
{unsigned char da;unsigned char i;for(i=0;i<8;i++){ scl = 1;I2C_Delay(DELAY_TIME);da <<= 1;if(sda) da |= 0x01;scl = 0;I2C_Delay(DELAY_TIME);}return da;
}//
unsigned char I2CWaitAck(void)
{unsigned char ackbit;scl = 1;I2C_Delay(DELAY_TIME);ackbit = sda; scl = 0;I2C_Delay(DELAY_TIME);return ackbit;
}//
void I2CSendAck(unsigned char ackbit)
{scl = 0;sda = ackbit; I2C_Delay(DELAY_TIME);scl = 1;I2C_Delay(DELAY_TIME);scl = 0; sda = 1;I2C_Delay(DELAY_TIME);
}unsigned char Read_v()
{unsigned int temp;I2CStart();I2CSendByte(0x90);I2CWaitAck();I2CSendByte(0x41);I2CWaitAck();I2CStart();I2CSendByte(0x91);I2CWaitAck();temp = I2CReceiveByte();I2CSendAck(1);I2CStop();return temp;
}void Write_v(unsigned char dat)
{I2CStart();I2CSendByte(0x90);I2CWaitAck();I2CSendByte(0x40);I2CWaitAck();I2CSendByte(dat);I2CWaitAck();I2CStop();
}iic.h
#ifndef __iic_h
#define __iic_hstatic void I2C_Delay(unsigned char n);
void I2CStart(void);
void I2CStop(void);
void I2CSendByte(unsigned char byt);
unsigned char I2CReceiveByte(void);
unsigned char I2CWaitAck(void);
void I2CSendAck(unsigned char ackbit);
unsigned char Read_v();
void Write_v(unsigned char dat);#endifds1302.c
/* # DS1302代码片段说明1. 本文件夹中提供的驱动代码供参赛选手完成程序设计参考。2. 参赛选手可以自行编写相关代码或以该代码为基础,根据所选单片机类型、运行速度和试题中对单片机时钟频率的要求,进行代码调试和修改。
*/ //
#include <STC15F2K60S2.H>
#include "ds1302.h"
#include "intrins.h"sbit SCK = P1^7;
sbit SDA = P2^3;
sbit RST = P1^3;code unsigned char Write_addr[] = {0x80,0x82,0x84,0x86,0x88,0x8a,0x8c};
code unsigned char Read_addr[] = {0x81,0x83,0x85,0x87,0x89,0x8b,0x8d};
unsigned char time[] = {0x01,0x20,0x20};void Write_Ds1302(unsigned char temp)
{unsigned char i;for (i=0;i<8;i++) { SCK = 0;SDA = temp&0x01;temp>>=1; SCK=1;}
} //
void Write_Ds1302_Byte( unsigned char address,unsigned char dat )
{RST=0; _nop_();SCK=0; _nop_();RST=1; _nop_(); Write_Ds1302(address); Write_Ds1302(dat); RST=0;
}//
unsigned char Read_Ds1302_Byte ( unsigned char address )
{unsigned char i,temp=0x00;RST=0; _nop_();SCK=0; _nop_();RST=1; _nop_();Write_Ds1302(address);for (i=0;i<8;i++) { SCK=0;temp>>=1; if(SDA)temp|=0x80; SCK=1;} RST=0; _nop_();SCK=0; _nop_();SCK=1; _nop_();SDA=0; _nop_();SDA=1; _nop_();return (temp);
}void Write_time()
{char i;Write_Ds1302_Byte(0x8e,0x00);for(i = 0;i < 3;i++)Write_Ds1302_Byte(Write_addr[i],time[i]);Write_Ds1302_Byte(0x8e,0x80);
}void Read_time()
{char i;for(i = 0;i < 3;i++)time[i] = Read_Ds1302_Byte(Read_addr[i]);
}ds1302.h
#ifndef __ds1302_h
#define __ds1302_hvoid Write_Ds1302(unsigned char temp);
void Write_Ds1302_Byte( unsigned char address,unsigned char dat );
unsigned char Read_Ds1302_Byte ( unsigned char address );
void Write_time();
void Read_time();#endifsys.c
#include <STC15F2K60S2.H>
#include "sys.h"
#include "intrins.h"void Delay12us() //@12.000MHz
{unsigned char i;_nop_();_nop_();i = 33;while (--i);
}void Delay_ms(unsigned int t) //@12.000MHz
{while(t--){unsigned char i, j;i = 12;j = 169;do{while (--j);} while (--i);}
}void Select_Hc573(char n)
{switch(n){case 4:P2 = P2 & 0x1f | 0x80;break;case 5:P2 = P2 & 0x1f | 0xa0;break;case 6:P2 = P2 & 0x1f | 0xc0;break;case 7:P2 = P2 & 0x1f | 0xe0;break;}P2 = P2 & 0x1f;
}void Sys_Init()
{P0 = 0x00;Select_Hc573(5);P0 = 0xff;Select_Hc573(4);
}void Select_Bit(unsigned char pos,dat)
{P0 = 0x01 << pos;Select_Hc573(6);P0 = dat;Select_Hc573(7);Delay_ms(1);P0 = 0xff;Select_Hc573(7);
}
sys.h
#ifndef __sys_h
#define __sys_hvoid Delay12us();
void Delay_ms(unsigned int t) ;
void Select_Hc573(char n);
void Sys_Init();
void Select_Bit(unsigned char pos,dat);#endifmain.c
#include <STC15F2K60S2.H>
#include "ds1302.h"
#include "iic.h"
#include "sys.h"
#include "stdio.h"sbit TX = P1^0;
sbit RX = P1^1;sbit R1 = P3^0;
sbit R2 = P3^1;
sbit R3 = P3^2;
sbit R4 = P3^3;
sbit C1 = P4^4;
sbit C2 = P4^2;
sbit C3 = P3^5;
sbit C4 = P3^4;code unsigned char SMG[] = { ~0x3F,~0x06,~0x5B,~0x4F,~0x66,~0x6D,~0x7D,~0x07,~0x7F,~0x6F,~0x40,~0x38,~0x39,~0x71,~0x76,0xfe,0xbf,0xf7,~0x73};unsigned int dis,distance,a;//距离
bit flag,flag_10ms;
unsigned char count;
unsigned int count1,count2;
extern unsigned char time[];
bit mode_dis;//0-触发 1-定时
unsigned char mode_record;// 0-最大值 1-最小值 2-均值
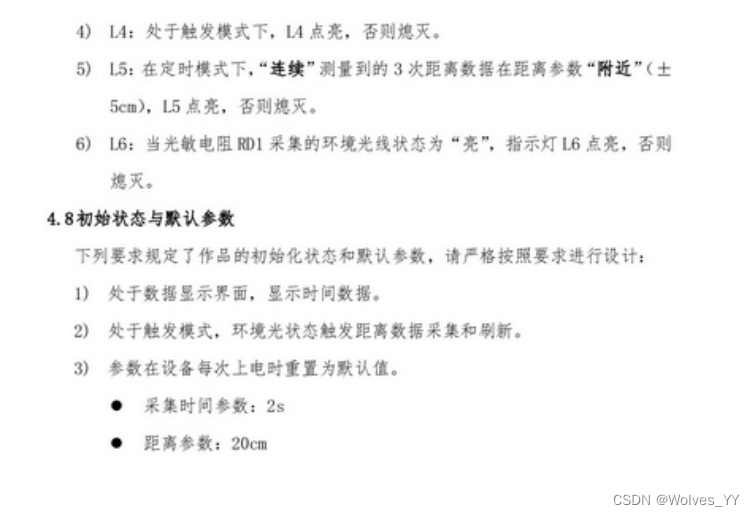
unsigned char dis_max,dis_min = 9;
float dis_sum;
float dis_ave;
char param_time[] = {2,3,5,7,9};
char param_time_P[] = {2,3,5,7,9};
char index;//时间参数索引
char index_P;//时间参数索引
unsigned int dis_index;//距离索引,用于计算平均值
char param_dis = 20;
char param_dis_P = 20;
unsigned char key_val;
bit mode;//0-数据界面 1-参数界面
unsigned char mode_dat;//0-时间 1-距离 2-数据记录
bit mode_param;// 0-时间 1-距离
bit L5_flag;void PCA_Init()
{P_SW1 &= 0xcf;CCON = 0;CH = CL = 0;CMOD = 0x01;CCAPM0 = 0x10;
}void Send()
{char i;for(i = 0;i < 8;i++){TX = 1;Delay12us();TX = 0;Delay12us();}CH = CL = 0;CF = CCF0 = 0;CCAPM0 |= 0x01;CR = 1;
}void PCA_isr() interrupt 7
{if(CCF0){distance = (CCAP0H << 8 | CCAP0L) * 0.017;CCF0 = 0;}else if(CF){distance = 99;CF = 0;}CCAPM0 &= (~0x01);CR = 0;
}void Display_time()//时间界面
{Select_Bit(0,SMG[time[2] / 16]);Select_Bit(1,SMG[time[2] % 16]);Select_Bit(2,SMG[10]);Select_Bit(3,SMG[time[1] / 16]);Select_Bit(4,SMG[time[1] % 16]);Select_Bit(5,SMG[10]);Select_Bit(6,SMG[time[0] / 16]);Select_Bit(7,SMG[time[0] % 16]);
}void Display_dis()//距离界面
{Select_Bit(0,SMG[11]);if(!mode_dis) Select_Bit(1,SMG[12]);else Select_Bit(1,SMG[13]);if(dis > 99) Select_Bit(5,SMG[dis / 100]);if(dis > 9) Select_Bit(6,SMG[dis / 10 % 10]);Select_Bit(7,SMG[dis % 10]);}void Display_record()//数据记录界面
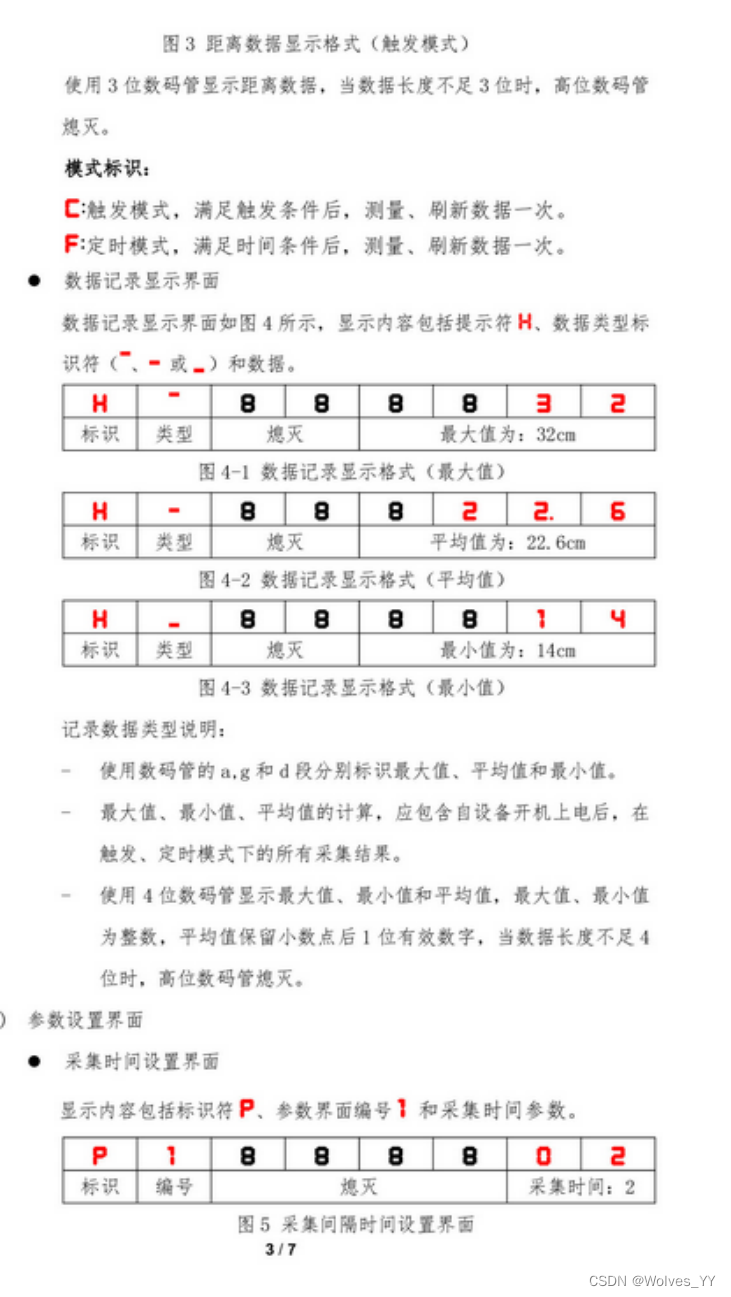
{Select_Bit(0,SMG[14]);switch(mode_record){case 0:Select_Bit(1,SMG[15]);if(dis_max > 99) Select_Bit(5,SMG[dis_max / 100]); if(dis_max > 9) Select_Bit(6,SMG[dis_max / 10 % 10]);Select_Bit(7,SMG[dis_max % 10]);break;case 1:Select_Bit(1,SMG[17]);if(dis_min > 99) Select_Bit(5,SMG[dis_min / 100]); if(dis_min > 9) Select_Bit(6,SMG[dis_min / 10 % 10]);Select_Bit(7,SMG[dis_min % 10]);break;case 2:Select_Bit(1,SMG[16]);if(dis_ave > 99) Select_Bit(4,SMG[((unsigned char)(dis_ave * 10)) / 1000]); if(dis_ave > 9) Select_Bit(5,SMG[((unsigned char)(dis_ave * 10)) / 100 % 10]); Select_Bit(6,SMG[((unsigned char)(dis_ave * 10)) / 10 % 10] - 0x80);Select_Bit(7,SMG[((unsigned char)(dis_ave * 10)) % 10]);break;}
}void Display_param_time()//时间参数界面
{Select_Bit(0,SMG[18]);Select_Bit(1,SMG[1]);Select_Bit(6,SMG[param_time[index] / 10]);Select_Bit(7,SMG[param_time[index] % 10]);
}void Display_param_dis()//距离参数界面
{Select_Bit(0,SMG[18]);Select_Bit(1,SMG[2]);Select_Bit(6,SMG[param_dis / 10]);Select_Bit(7,SMG[param_dis % 10]);
}void Timer0Init(void) //10毫秒@12.000MHz
{AUXR &= 0x7F; //定时器时钟12T模式TMOD &= 0xF0; //设置定时器模式TL0 = 0xF0; //设置定时初值TH0 = 0xD8; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 1; //定时器0开始计时ET0 = 1;EA = 1;
}void Timer0_isr() interrupt 1
{flag_10ms = 1;if(mode_dis)//定时模式下{count2 = 0;if(++count1 > param_time_P[index_P] * 100)//距离的刷新时间等于时间参数才刷新一次{count1 = 0;flag = 1;}}else//触发模式下,距离的刷新时间为1秒{count1 = 0;if(++count2 > 100){count2 = 0;flag = 1;}}
}unsigned char Key_Scan()
{unsigned char temp = 0;static unsigned char cnt4 = 0;static unsigned char cnt5 = 0;static unsigned char cnt8 = 0;static unsigned char cnt9 = 0;if(flag_10ms){R3 = 0;R1 = R2 = R4 = C1 = C2 = C3 = C4 = 1;if(C1 == 0) cnt5++;if(C1 == 1) {if(cnt5 > 2) temp = 5;cnt5 = 0;}if(C2 == 0) cnt9++;if(C2 == 1) {if(cnt9 > 2) temp = 9;cnt9 = 0;}R4 = 0;R1 = R2 = R3 = C1 = C2 = C3 = C4 = 1;if(C1 == 0) cnt4++;if(C1 == 1) {if(cnt4 > 2) temp = 4;cnt4 = 0;}if(C2 == 0) cnt8++;if(C2 == 1) {if(cnt8 > 2) temp = 8;cnt8 = 0;}flag_10ms = 0;}return temp;
}void Key_Pro()
{switch(key_val){case 4:mode ^= 1;if(!mode) mode_param = 0;else mode_dat = 0;break;case 5:if(!mode){if(++mode_dat > 2)mode_dat = 0;}else{mode_param ^= 1;}break;case 8:if(!mode) {if(mode_dat == 1) mode_dis ^= 1;if(mode_dat == 2){if(++mode_record > 2)mode_record = 0;}}break;case 9:if(mode){if(!mode_param){if(++index > 4)index = 0;}else{param_dis += 10;if(param_dis > 80)param_dis = 10;}}break;}if(mode_dat == 1)mode_record = 0;if(!mode){param_time_P[index_P] = param_time[index];index_P = index;param_dis_P = param_dis;}
}void Out_dac()//DAC输出
{if(dis <= 10) Write_v(1 * 51);else if(dis >= 80) Write_v(5 * 51);else Write_v((((dis - 10) * 4 / 70.0 + 1)) * 51);
}void Dis_Pro()//超声波测距
{if(flag){flag = 0;a = distance;if((dis >= (param_dis_P - 5)) && (dis <= (param_dis_P + 5))) count++;else {count = 0;L5_flag = 0;}if(count == 3) {L5_flag = 1;count = 0;}}if(mode_dis){if((time[0] / 16 * 10 + time[0] % 16) % param_time_P[index_P] == 0){dis = a;dis_index++;if(dis > dis_max) dis_max = dis;if(dis < dis_min) dis_min = dis;dis_sum += dis;dis_ave = (dis_sum / dis_index);}}else{if(Read_v() > 150)if(Read_v() < 150){dis = distance;dis_index++;if(dis > dis_max) dis_max = dis;if(dis < dis_min) dis_min = dis;dis_sum += dis;dis_ave = (dis_sum / dis_index);}}
}void Led(unsigned char addr,enable)
{static unsigned char temp = 0x00;static unsigned char temp_old = 0xff;if(enable) temp |= 0x01 << addr;else temp &= ~(0x01 << addr);if(temp != temp_old){P0 = ~temp;Select_Hc573(4);temp_old = temp;}
}void Led_Pro()
{if(!mode && mode_dat == 0) Led(0,1);else Led(0,0);if(!mode && mode_dat == 1) Led(1,1);else Led(1,0);if(!mode && mode_dat == 2) Led(2,1);else Led(2,0);if(!mode_dis) Led(3,1);else Led(3,0);if(L5_flag) Led(4,1);else Led(4,0);if(Read_v() > 150) Led(5,1);else Led(5,0);
}void UartInit(void) //9600bps@12.000MHz
{SCON = 0x50; //8位数据,可变波特率AUXR &= 0xBF; //定时器1时钟为Fosc/12,即12TAUXR &= 0xFE; //串口1选择定时器1为波特率发生器TMOD &= 0x0F; //设定定时器1为16位自动重装方式TL1 = 0xE6; //设定定时初值TH1 = 0xFF; //设定定时初值ET1 = 0; //禁止定时器1中断TR1 = 1; //启动定时器1
}extern char putchar(char dat)
{SBUF = dat;while(!TI);TI = 0;return dat;
}void main()
{Sys_Init();PCA_Init();Write_time();Timer0Init();UartInit();while(1){Send();Read_time();key_val = Key_Scan();Key_Pro();Out_dac();Dis_Pro();Led_Pro();if(!mode){switch(mode_dat){case 0:Display_time();break;case 1:Display_dis();break;case 2:Display_record();break;}}else{if(!mode_param) Display_param_time();else Display_param_dis();} }
}相关文章:
蓝桥杯单片机第十二届国赛 真题+代码
iic.c /* # I2C代码片段说明1. 本文件夹中提供的驱动代码供参赛选手完成程序设计参考。2. 参赛选手可以自行编写相关代码或以该代码为基础,根据所选单片机类型、运行速度和试题中对单片机时钟频率的要求,进行代码调试和修改。 */ #include <STC1…...
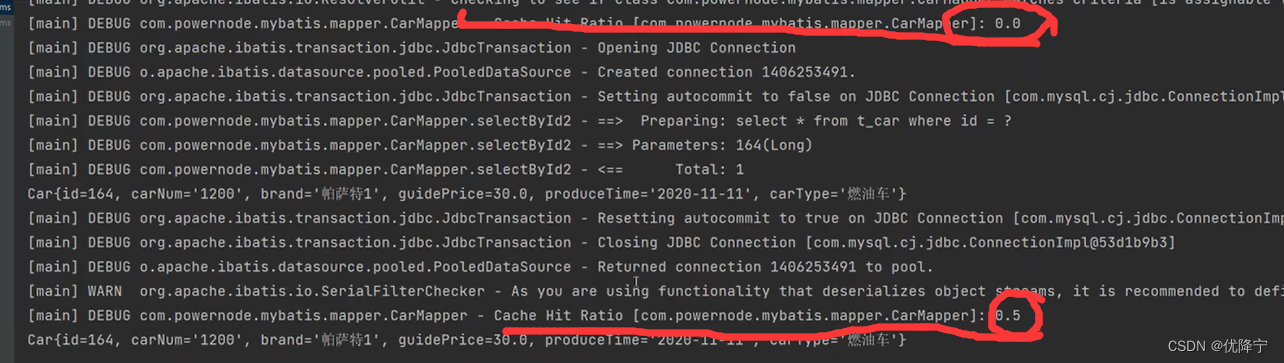
MyBatis学习笔记之缓存
文章目录 一级缓存一级缓存失效 二级缓存二级缓存失效二级缓存相关配置 MyBatis集成EhCache 缓存:cache 缓存的作用:通过减少IO的方式,来提高程序的执行效率 mybatis的缓存:将select语句的查询结果放到缓存(内存&…...

小程序 WxValidate.js 再次封装
util.js // 合并验证规则和提示信息 const filterRules (objectItem) > {let rules {}, messages {};for (let key in objectItem) {rules[key] objectItem[key].rulesmessages[key] objectItem[key].message}return { rules, messages } }module.exports {filterRule…...

redis 第三章
目录 1.主从复制 2.哨兵 3.集群 4.总结 1.主从复制 结果: 2.哨兵 3.集群 4.总结 通过集群,redis 解决了写操作无法负载均衡,以及存储能力受到单机限制的问题,实现了较为完善的高可用方案。...

MYSQL常见面试题汇总
MYSQL常见面试题汇总 1. 什么是MYSQL?它有哪些特点? MYSQL是一种开源的关系型数据库管理系统。它具有以下特点: 高性能:MYSQL能够处理大量的并发请求,并提供快速的响应时间。可靠性:MYSQL具有数据持久化…...

Java接口通过token登录实现页面跳转到登录成功后的页面
首先,你需要在接口请求中将token作为参数传递给后端,后端需要对token进行验证并获取登录用户的信息。 在验证通过后,你可以将登录成功后的页面链接返回给前端,前端通过跳转到该链接来实现页面跳转。 以下是一个简单的Java代码演…...
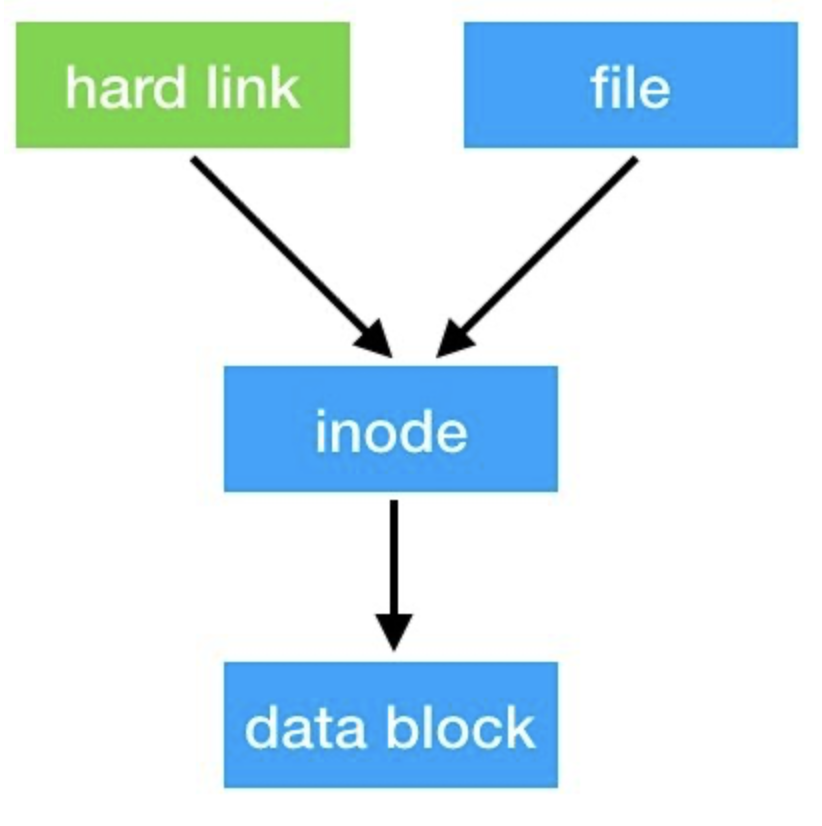
Linux-文件管理
1.文件管理概述 1.Bash Shell对文件进行管理 谈到Linux文件管理,首先我们需要了解的就是,我们要对文件做些什么事情? 其实无非就是对一个文件进行、创建、复制、移动、查看、编辑、压缩、查找、删除、等等 例如 : 当我们想修改系统的主机名…...

Android getevent用法详解
TP驱动调试分享——基于Qualcomm SDM710平台Android9.0,TP 采用I2C方式和CPU进行通信_高通tp驱动_永恒小青青的博客-CSDN博客 手机触摸屏扫描信号实测波形_触摸屏报点率_AirCity123的博客-CSDN博客 如何查看TP报点率?触摸TP查看详细信息 adb shell ge…...
:如何定义 TypeScript 中的变量和函数类型?)
面试题-TS(二):如何定义 TypeScript 中的变量和函数类型?
面试题-TS(二):如何定义 TypeScript 中的变量和函数类型? 一、 变量类型的定义 在TypeScript中,我们可以使用冒号(:)来指定变量的类型。以下是一些常见的变量类型: 布尔类型(boolean):表示tr…...

【4】-多个User执行测试
目录 一个locustfile中有多个User 使用--class-picker指定执行 小结 一个locustfile中有多个User from locust import task, HttpUserclass User01(HttpUser):weight 3 # 权重host https://www.baidu.comtaskdef user_01_task(self):self.client.get(url/, nameuser_01_…...

基于Eisvogel模板的Markdown导出PDF方法
Requirements 模板地址:Wandmalfarbe/pandoc-latex-template Pandoc:Pandoc官网 Latex环境:例如TexLive Pandoc参数 --template"模板存放位置" --listings --pdf-enginexelatex --highlight-style kate -V CJKmainfontSimSun -V C…...
linux服务器安装redis
一、安装下载 下载安装参考文章 下载安装包地址:https://download.redis.io/releases/ 亲测有效,但是启动的步骤有一些问题 安装完成!!! 二、启动 有三种启动方式 默认启动指定配置启动开机自启 说明:…...

QT中信号和槽本质
信号 信号的本质就是事件 在QT中信号的发出者是某个实例化的类对象,对象内部可以进行相关事件的检测。 槽 槽函数是一类特殊的功能的函数,也可以作为类的普通成员函数来使用 在Qt中槽函数的所有者也是某个类的实例对象。 信号和槽的关系 在Qt中我…...

layui各种事件无效(例如表格重载或 分页插件按钮失效)的解决方法
下图是我一个系统的操作日志,在分页插件右下角嵌入了一个导出所有数据的按钮 ,代码没有任何问题,点击导出按钮却失效 排查之后,发现表格标签table定义了ID又定义了lay-filter,因我使用的layui从2.7.6升级到2.8.11&…...
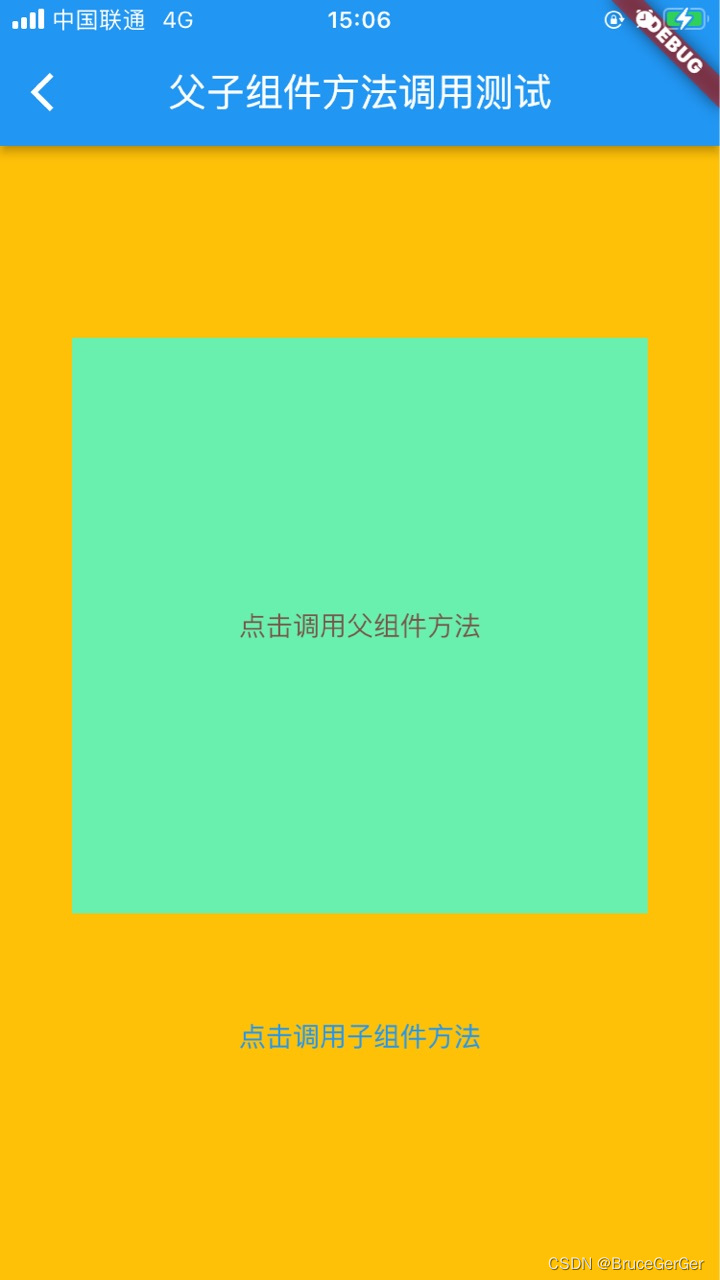
flutter开发实战-父子Widget组件调用方法
flutter开发实战-父子Widget组件调用方法 在最近开发中遇到了需要父组件调用子组件方法,子组件调用父组件的方法。这里记录一下方案。 一、使用GlobalKey 父组件使用globalKey.currentState调用子组件具体方法,子组件通过方法回调callback方法调用父组…...

策略模式的实现与应用:掌握灵活算法切换的技巧
文章目录 常用的设计模式有以下几种:一.创建型模式(Creational Patterns):二.结构型模式(Structural Patterns):三.行为型模式(Behavioral Patterns):四.并发…...
当ChatGPT应用在汽车行业,具体有哪些场景?
ChatGPT有潜力彻底改变汽车行业并将其提升到新的高度。在ChatGPT的加持下,该行业的多个领域都将取得重大变化。 利用ChatGPT作更高级的虚拟助理 你可能用过现有的虚拟助理,它们一系列的回复有时候让人不得不感叹一句“人工智障”!然而&a…...
)
行为型-中介者模式(Mediator Pattern)
概述 中介者模式(Mediator Pattern)是一种行为型设计模式,它通过封装一系列对象之间的交互方式,使这些对象能够互相通信而不需要直接相互引用。中介者模式通过集中控制对象的交互,使得对象之间的耦合度降低࿰…...
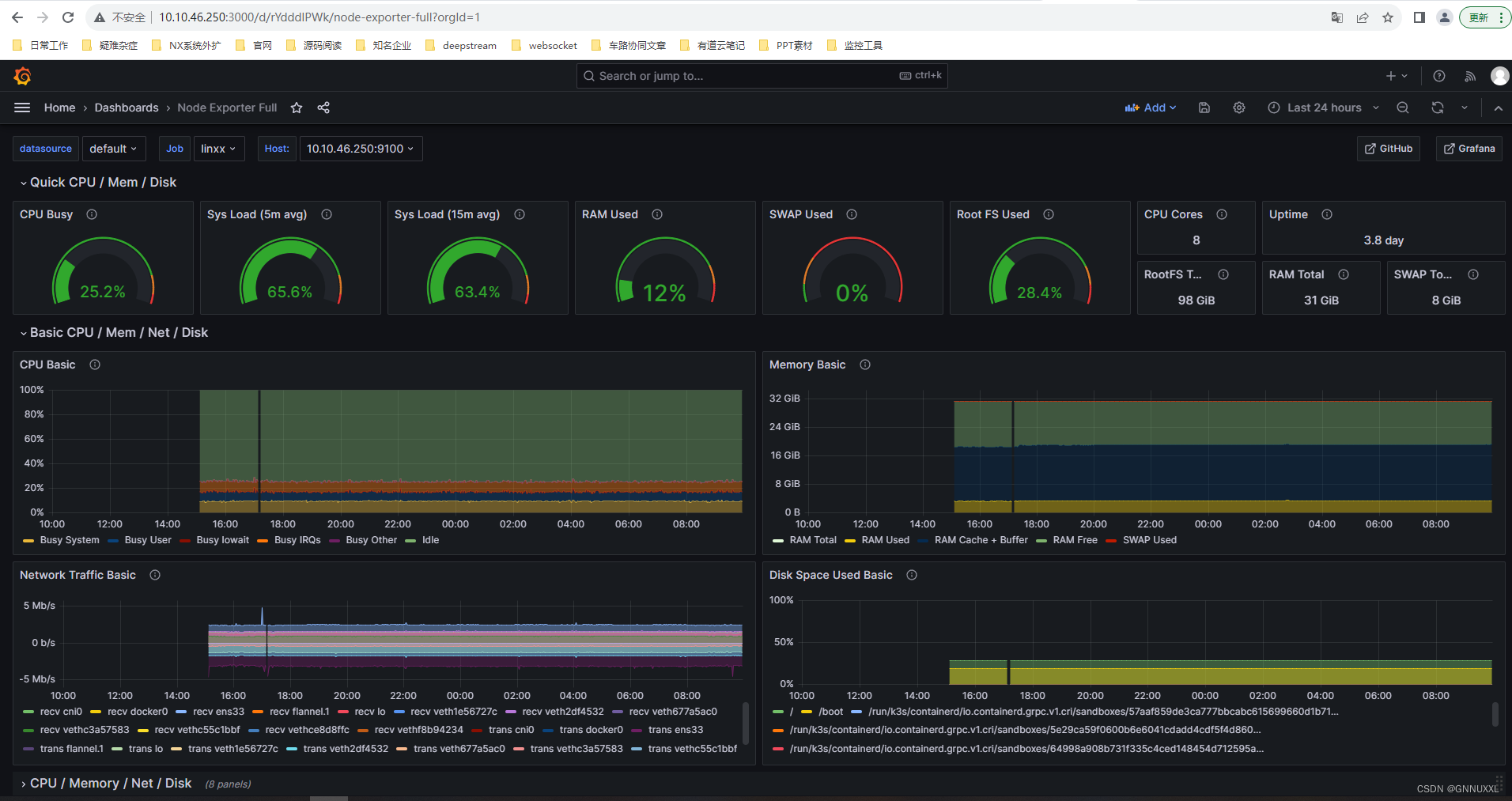
Kibana+Prometheus+node_exporter 监控告警部署
下载好三个软件包 一、prometheus安装部署 1、解压 linxxubuntu:~/module$ tar -xvf prometheus-2.45.0-rc.0.linux-amd64.tar.gz 2、修改配置文件的IP地址 # my global config global:scrape_interval: 15s # Set the scrape interval to every 15 seconds. Default is ever…...
)
【前端知识】JavaScript——设计模式(工厂模式、构造函数模式、原型模式)
【前端知识】JavaScript——设计模式(工厂模式、构造函数模式、原型模式) 一、工厂模式 工厂模式是一种众所周知的设计模式,广泛应用于软件工程领域,用于抽象创建特定对象的过程。 优点:可以解决创建多个类似对象的…...

2026 西安 AI 问答曝光搭建技术解析:GEO 知识图谱 + 深度测评
随着大语言模型技术的快速普及,AI 搜索已经成为用户获取企业信息、商家服务的核心入口。根据中国互联网信息中心 2026 年发布的《中国人工智能搜索发展报告》显示,2025 年国内 AI 搜索用户规模突破 8.2 亿,日均搜索请求超过 20 亿次ÿ…...

第3篇:系统透视——信息部门如何构建“税务友好型”IT架构
本篇导读:如果你是信息总监或IT负责人,请通读全文,尤其是“系统合规设计的三必须”和“现场检查SOP”;如果你是财税人员,请重点阅读“研产供销全链条的系统对接要求”和“与IT部门的协作要点”;如果你是老板…...

HarmonyOS ArkTS DateUtil 日期增减与日历计算完整指南
文章目录 背景一、引言二、日期增减方法详解使用示例 三、日历计算方法详解四、Demo 演示:日期增减结果展示五、Demo 演示:月历视图完整实现六、日历视图关键点解析为什么要填充前置空格?getLastDayOfMonth 的实现技巧 七、小结 背景 近期发现…...

深度解析HS2-HF Patch:从技术框架到创作工具链的完整升级方案
深度解析HS2-HF Patch:从技术框架到创作工具链的完整升级方案 【免费下载链接】HS2-HF_Patch Automatically translate, uncensor and update HoneySelect2! 项目地址: https://gitcode.com/gh_mirrors/hs/HS2-HF_Patch 你是否曾因Honey Select 2的原版体验受…...
)
别再只用鼠标了!用Leap Motion手势控制Unity游戏,保姆级配置避坑指南(2024版)
2024年Unity手势交互开发实战:Leap Motion从配置到游戏逻辑全解析在游戏开发领域,交互方式的创新往往能带来全新的体验。想象一下,玩家不再需要键盘鼠标,仅凭自然的手部动作就能操控游戏角色——这正是Leap Motion手势识别技术为U…...

【DeepSeek灰度发布黄金法则】:20年SRE亲授7步零故障上线实战框架
更多请点击: https://intelliparadigm.com 第一章:DeepSeek灰度发布策略全景图 DeepSeek模型服务的灰度发布并非简单的流量切分,而是一套融合可观测性、渐进式验证与多维熔断机制的工程化闭环体系。其核心目标是在保障线上推理稳定性的同时&…...

用PyTorch复现FactorVAE:一个能同时预测收益和风险的量化模型实战教程
用PyTorch实战FactorVAE:构建收益与风险双预测的量化模型 在量化投资领域,传统线性因子模型正逐渐被非线性机器学习方法所取代。然而金融数据特有的低信噪比特性,使得直接从市场数据中提取有效因子成为一项艰巨挑战。本文将深入探讨如何利用P…...

别再乱建索引了!用Explain的key_len字段,一眼看穿你的MySQL联合索引到底生效了几个字段
解密MySQL联合索引:用key_len精准判断索引生效范围 在数据库性能优化领域,联合索引的使用一直是个既基础又容易踩坑的话题。很多开发者虽然知道"最左匹配原则"这个名词,但在实际业务场景中,面对复杂的查询条件组合时&a…...

模式分层预测驱动推断:处理复杂缺失数据的统计新框架
1. 项目概述:当数据“缺胳膊少腿”时,如何做出靠谱的推断?在数据科学和统计建模的日常工作中,我们最怕遇到什么?不是复杂的算法,也不是海量的数据,而是数据本身“缺胳膊少腿”——也就是缺失值。…...

自然语言处理的实战项目:从0到1搭建属于自己的文本分类系统
对于软件测试从业者而言,日常工作中我们每天都会接触大量的文本数据:缺陷管理系统中的bug描述、测试用例的步骤说明、用户反馈的问题报告、需求文档的规格描述,甚至是接口返回的异常信息文本。这些非结构化文本往往隐含着关键业务信息&#x…...