“上云入端” 浪潮云剑指组织智能化落地“最后一公里”

进入2025年,行业智能体正在成为数实融合的核心路径。2025年初DeepSeek开源大模型的横空出世,通过算法优化与架构创新,显著降低算力需求与部署成本,推动大模型向端侧和边缘侧延伸。其开源策略打破技术垄断,结合边缘计算产业的成熟与机器人技术的突破,将彻底打开从互联网侧智能体向行业侧智能体的大门。
大力推动数字经济和实体经济深度融合,是我国建设现代化产业体系的必然要求,是构建新发展格局的重要途径。对于实体经济中的传统行业来说,有着大量难以用虚拟数字技术覆盖的实体经济场景,那么借助物理机器人和智能体弥合物理世界与数字世界的交互鸿沟,这种“软硬协同”模式不仅重构了产业生产流程,对于用户数智化转型有着重大的意义和价值,也是数实融合大文章的“智能涌现之笔”。

在2025浪潮云战略发布会上,浪潮云发布了分布式智能云战略,同时联合业界头部厂商首批发布海若一体机、AI安全巡检、水利巡检、应急管理及智能会议终端等海若智能体产品,将浪潮云多年积累的行业知识和场景,“上云入端”打穿组织用户数智场景,解锁组织用户数智场景中的“死角”和“盲区”,破局组织智能化落地“最后一公里”。
从一个场景解读“最后一公里”
浪潮云积极响应国家战略,致力于通过技术创新和智能化应用,全力推动数字化转型和高质量发展,实现了从“政务云系统集成商”到“分布式云服务提供商”,再到“分布式智能云运营商”的“三次跃升”,完整构建起智数云安一体化融合的发展路径,将大模型、智能体、智能终端等按用户侧场景打包成全案,并为组织用户提供对应的技术匹配和服务。
多年来传统产业数字化和智能化都有着“死角”和“盲区”,这也是工业4.0想要建立物理世界数字孪生体的意图所在,也就是将物理世界全部数字化,再在数字化的基础上进而互联网化、数据化和智能化,通过物理世界的数字孪生反向打通物理世界的堵点、断点和卡点,从而为人们操控物理世界实现全新的路径和方式,不仅是降本增效,更是颠覆性改变物理世界,进而创造新的价值。
具体怎么理解?从数据中心管理这个场景入手,进一步看浪潮云如何打穿组织智能化落地“最后一公里”,如何解锁行业智能化的“死角”和“盲区”。

数据中心主要由室外设备、室内设备和数据中心机房等多种要素构成,而人工巡检有着诸多挑战:
- 在室外楼顶巡检时,往往现场分散、巡检设备多、巡检区域大、人员配备不足,人员巡检难以完全覆盖。
- 在室外地面设备巡检时,园区内的外场作业设备包括柴油发电机、消防栓、楼体外观落物以及人员巡检难以触达覆盖的场景,这些设备和地区的巡检也耗时耗力且难以全面覆盖。
- 在数据中心功能区巡检时,面向电池间、配电间、钢瓶间、空调室、新风室的环境感知、表计等场景的巡检结果往往不稳定。
- 在数据中心机房巡检时,巡检人员对现场环境感知较差,难以察觉有毒有害气体,尤其在污染、封闭、高温的室内场所。
数据中心巡检作为保障设施稳定运行的核心环节,其重要意义体现在通过常态化巡检降低故障率、提升运维效率,保障数据中心稳定可靠运行,进而确保数据与应用的连续性。但数据中心巡检所涉及的物理区域都难以被数字化,更难以运用传统自动化和智能化技术代替人工进行低成本、高效率、常态化巡检,这就是行业数智化中典型的“死角”和“盲区”。

那么,浪潮云又准备如何破局?浪潮云采用空地一体化的模式,运用安全巡检机器狗、安全巡检无人机等组成的安全巡检智能终端,代替人工对数据中心室外室内相关区域设备进行自动数据读取并完成巡检任务,再以智能巡检终端采集的数据为起点,融合数据中心行业知识,利用海若智能体操作系统(AgentOS)打造任务管理、报告生成、工单转派、维保辅助等智能巡检智能体,从而实现数据中心巡检与维护管理的自动化与智能化。

从浪潮云提出的数据中心巡检方案可以看出,浪潮云以分布式智能云和大模型之力覆盖各地的数据中心园区,再联合生态伙伴开发能够执行人工任务的机器人和无人机等新型硬件智能终端,通过智能体打通从硬件智能终端感知到云和大模型分析的任务链路、数据链路和知识链路,最后生成智能、辅助决策,从而解锁行业智能化的“死角”和“盲区”,并围绕“数据中心智能巡检”这个数智场景形成全案,在这个过程中破局组织智能化落地“最后一公里”。
“上云入端”打穿“最后一公里”
浪潮云是从政务云系统集成商起家,而政务云在本质上是私有云,因此浪潮云的“初心”在于私有云。AI时代,面对组织用户降低私有云运维复杂度、加强云基础架构健壮性、优化云基础架构成本、支撑大规模分布式业务应用等方面的诉求,可运营已成为私有云发展的必然阶段。
在2025浪潮云战略发布会上,浪潮云提出了可运营私有云的概念,并将可运营私有云理念下的分布式智能云作为浪潮云的下一个发展方向。所谓可运营私有云,即将原来一个一个本地部署的相互隔离的私有云,通过一个统一的云管系统进行连接和管理,这个云管系统既可以运行在公有云上,也可以远程运行在一个私有云或混合云中,而云管系统可以纳管用户的私有云、公有云、专属托管云和自建专属云等分布式云资源,另外这些分布式云资源可以在需要的时候常态化连接,也可以切断连接,这就是“以用户为中心”的“上云”。
“上云”对于浪潮云来说,契合了组织用户的需求。云管系统以云化方式为用户提供服务,这非常类似VMware和红帽的理念,但不同厂商有着不同的实现路线。对于浪潮云来说,必须要满足组织用户对于计算资源隔离的天然要求,但也要满足其想要在本地获得公有云体验的需求,也就是通过一个统一的门户进行产品浏览、在线采购、远程部署到所需位置、在线升级和运维等等,更为重要的是像公有云一样柔性化标准化生产和部署私有云以及扩缩容、大幅降低私有云的部署成本和运维成本、将安全与合规内置到产品等,这就是“以用户为中心”的可运营的公有云体验。
“上云”还是AI演进到大模型、倒逼私有云的全面升级。如果说之前组织用户还缺乏全面、全速向全公有云体验私有云推进的动力,那么大模型时代的到来彻底拉高了私有云的“水位”。众所周知,万亿参数甚至十万亿参数的大模型,必须要使用公有云的庞大算力才能实现大模型的训练和迭代。而进入大模型时代,大模型与生成式AI成为了所有用户的刚需,特别是DeepSeek带来了前所未有的大模型政企渗透率,这进一步倒逼用户的线下计算资源“上云”,也就是实现全公有云体验。
对于浪潮云来说,这些年通过深耕政务云,已经极大降低了人工线下运维私有云的成本、锤炼了人工线下运维私有云的能力,而智能体和机器人技术的进步,进一步将人工线下运维推进到全机器线下自动化智能化运维,这不仅将线下运维推进到了新阶段,更能通过人工智能大模型和智能体将线下资源都连接起来,形成“上云”体验。浪潮云还在近年深耕异构算力资源调度即分布式云技术,这既包括芯片级也包括算力级,通过跨各类计算资源的算力调度,满足大模型的需求,这就为分布式智能云打下了坚实的基础。

“入端”则指的是浪潮云与各类智能终端厂商的合作,例如机器人、机器狗、无人机、AR眼镜等,由智能终端厂商提供硬件技术和数据采集能力,而浪潮云一方面提供面向组织用户数智场景的知识和技术参与,以提升智能终端硬件技术和数据采集能力的组织用户数智场景适配度,另一方面则用可运营的私有云快速实现边缘节点的私有云部署,同时提供云端大模型和智能体开发,连接边缘节点私有云与集中控制的云管系统,打通从大模型、智能体到边缘节点和智能终端硬件的数据链路、智能链路,打穿从终端感知到中央分析决策的“最后一公里”,围绕组织用户数智场景形成和交付全案。
从浪潮云的数据中心智能巡检方案就可以看到,可运营私有云能够快速为大量数据中心园区或算力园区部署私有云,然后通过无人机、机器狗、机器人等智能终端进行数据采集,再通过智能体打通本地私有云和中央云管系统,这样一个全案能够彻底解决组织用户数智场景中的所有问题,也能为组织用户实现从“云”到“端”的全公有云体验和贯穿“云”“端”的大模型及智能体能力。
对于2025年的浪潮云来说,今天的浪潮云能够围绕用户数智场景一体化交付“智数云安”能力和方案,这其中也包括海若大模型一体机和边缘云一体机的混合交付。目前,海若大模型一体机已经接入了海若大模型和DeepSeek,为组织用户提供大模型智能应用落地的一体化解决方案。
物理AI中试平台,打造可运营全案的核心
在浪潮“上云入端”的庞大布局中,面向终端用户场景的各种智能终端特别是机器狗、机器人和无人机等是端侧方案的亮点,正是这些智能终端让端侧用户场景完成了数据闭环。但要大规模为各组织用户生产和部署以终端场景为中心的全案,就需要大规模预训练机器狗、机器人、无人机等,再投入到实际环境中迭代,这就是物理AI中试平台。
在2025 CES上,英伟达公司发布了Cosmo“加速物理AI的开发平台”,也就是用真实数据与合成数据一起组成仿真环境,在仿真环境中大规模训练符合特定场景的智能机器,再投放到真实商业环境中迭代,Cosmo就是典型的面向生成式AI的中试平台。
物理AI中试平台体现了浪潮云在生成式AI时代远见和勇气,因为就算是英伟达也才刚刚推出物理AI中试平台。物理AI中试平台是一个产业平台,对于机器人、机器狗、无人机产品厂商而言,他们无法也不会投资这样一个产业平台。而浪潮云作为一家云技术厂商,却敢于投资物理AI中试平台,可见浪潮云聚焦“智慧系统的全场景运营商”这一新定位的决心。
具体来看浪潮云的物理AI中试平台,这就是海若具身机器人训练平台。该平台依托浪潮云“云网边端”+行业应用的全栈式技术生态,深度融合分布式异构算力、机器人硬件平台及多模态组件,构建机器人操作系统、模型服务平台、智能体平台与模拟仿真平台等于一体的机器人训练平台,形成“验证-研发-训练-部署”一站式解决方案,赋能机器人产业行业工程化。海若具身机器人训练平台,以具身智能为载体,构建数据-模型-训练场核心技术体系,赋能电力、水利、应急、园区巡检的业务场景应用。
海若大模型工厂、海若具身机器人训练平台、OpsCenter,这三者构成了浪潮云的可运营全案“新三板斧”。对于围绕组织用户场景全案,海若具身机器人训练平台负责在组织用户场景仿真中持续训练机器人、机器狗等智能终端机器,大模型工厂则在云端持续提升大模型和智能体对于行业客户场景的学习,OpsCenter则负责智能体的运维和修复、确保AI长期保持高效状态,从而让组织用户数智场景全案“生生不息”可持续运营。
整体来说:2025年的浪潮云正以全新的姿态挺立生成式AI潮头:以长期服务组织用户为根基,浪潮云已全面进化到“以用户为中心”的可运营私有云厂商,并融合大模型、大模型工厂、具身机器人训练平台、OpsCenter、智能终端生态联盟等新能力,打造了可运营的全案解决方案,这就是对“智慧系统的全场景运营商”的解读,也是对“有云处皆智能”的深刻诠释。(宁川)
相关文章:
“上云入端” 浪潮云剑指组织智能化落地“最后一公里”
进入2025年,行业智能体正在成为数实融合的核心路径。2025年初DeepSeek开源大模型的横空出世,通过算法优化与架构创新,显著降低算力需求与部署成本,推动大模型向端侧和边缘侧延伸。其开源策略打破技术垄断,结合边缘计算…...

CentOS 7 如何挂载ntfs的移动硬盘
CentOS 7 如何挂载ntfs的移动硬盘 前言一、查看硬盘并尝试挂载(提示无法挂载)二、yum安装epel-release提示yum被锁定三、强行终止yum的进程四、yum安装epel-release完成五、yum安装ntfs-3g六、此时可正常挂载NTFS硬盘 前言 CentOS 7默认情况下是不支持NTFS的文件系统ÿ…...

pytorch+maskRcnn框架训练自己的模型以及模型导出ONXX格式供C++部署推理
背景 maskrcnn用作实例分割时,可以较为精准的定位目标物体,相较于yolo只能定位物体的矩形框而言,优势更大。虽然yolo的计算速度更快。 直接开始从0到1使用maskrCNN训练自己的模型并并导出给C部署(亲测可用) 数据标注…...

①EtherCAT/Ethernet/IP/Profinet/ModbusTCP协议互转工业串口网关
型号 协议转换通信网关 EtherCAT 转 Modbus TCP MS-GW15 概述 MS-GW15 是 EtherCAT 和 Modbus TCP 协议转换网关,为用户提供一种 PLC 扩展的集成解决方案,可以轻松容易将 Modbus TCP 网络接入 EtherCAT 网络 中,方便扩展,不受限…...

Python扩展知识详解:lambda函数
目录 前言 1 基本知识点 语法 特点 代码示例 2 常见使用场景 1. 与高阶函数配合使用 2. 作为排序键来使用 3. 立即调用函数 4. 在字典中使用 3 高级用法(进阶版) 1. 多参数lambda 2. 设置默认参数 3. 嵌套lambda 注意事项 何时…...

信号量与基于环形队列的生产者消费者模型
目录 POSIX信号量 理解 使用 初始化 销毁 等待 发布信号量 基于环形队列的生产者消费者模型 POSIX信号量 理解 信号量可用于线程间的同步,它可以用于将一整块资源切成一个个的小部分以供并发访问。它实际上是一个计数器,但特别之处在于支持原子…...
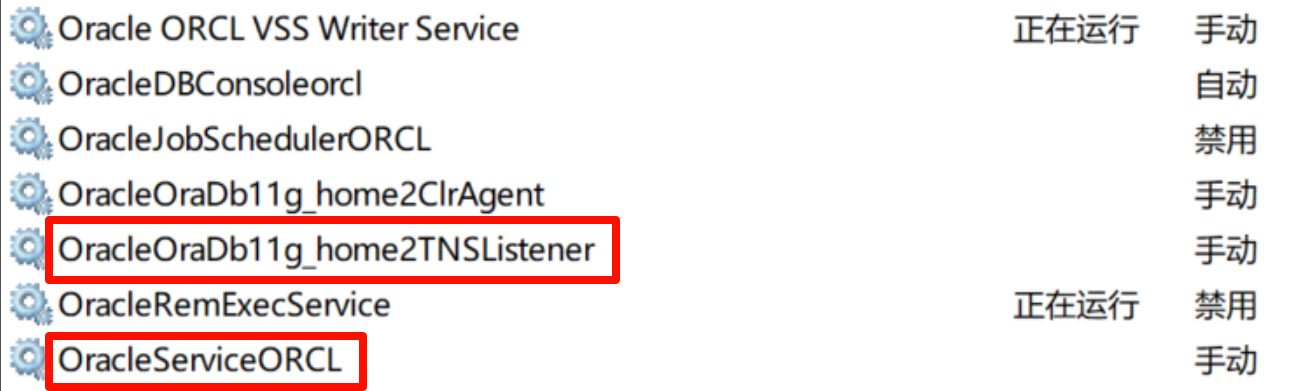
《Oracle服务进程精准管控指南:23c/11g双版本内存优化实战》 ——附自动化脚本开发全攻略
正在学习或者是使用 Oracle 数据库的小伙伴,是不是对于那个一直启动且及其占用内存的后台进程感到烦躁呢?而且即使是手动去开关也显得即为麻烦,所以基于我之前所学习到的方法,我在此重新整理,让大家动动手指就能完成开…...
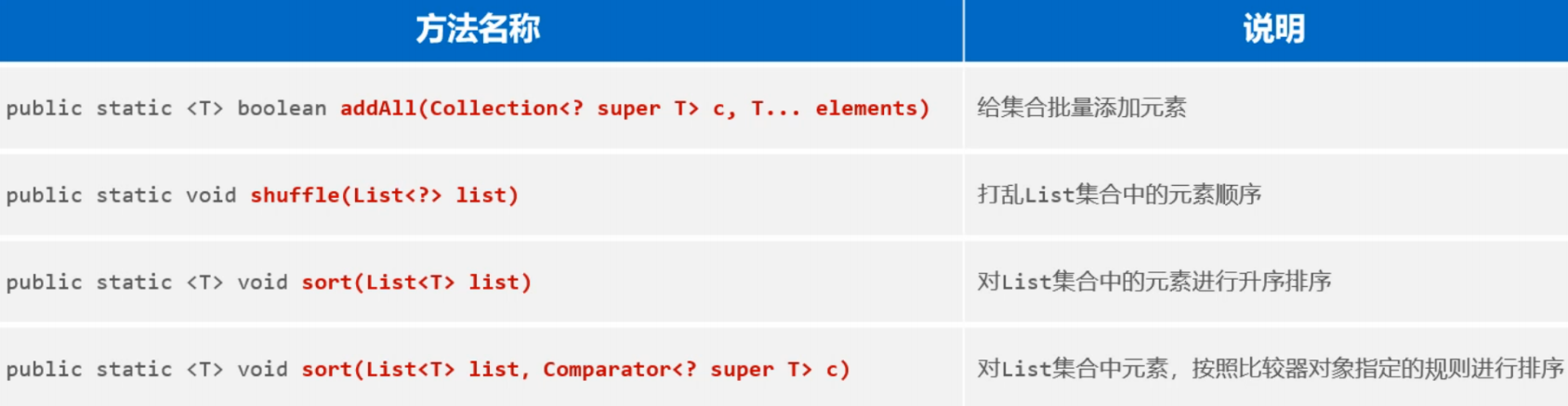
Java单列集合[Collection]
目录 1.Collection单列集合 1.1单列集合各集合特点 1.2、Collection集合 1.2.1、Collection方法 1.2.2、Collection遍历方式 1.2.2.1、迭代器遍历集合 1.2.2.2、增强for遍历集合 1.2.2.3、forEach遍历集合(JDK8之后) 1.2.2.4、遍历案例 1.3、Li…...

【C++重点】lambda表达式是什么
Lambda 表达式是 C11 引入的特性,它允许你定义匿名函数对象(即没有名字的函数)。Lambda 表达式可以在需要函数对象的地方直接定义函数,常用于 STL 算法和回调机制中。 lambda表达式基本语法 [捕获列表](参数列表) -> 返回类型…...
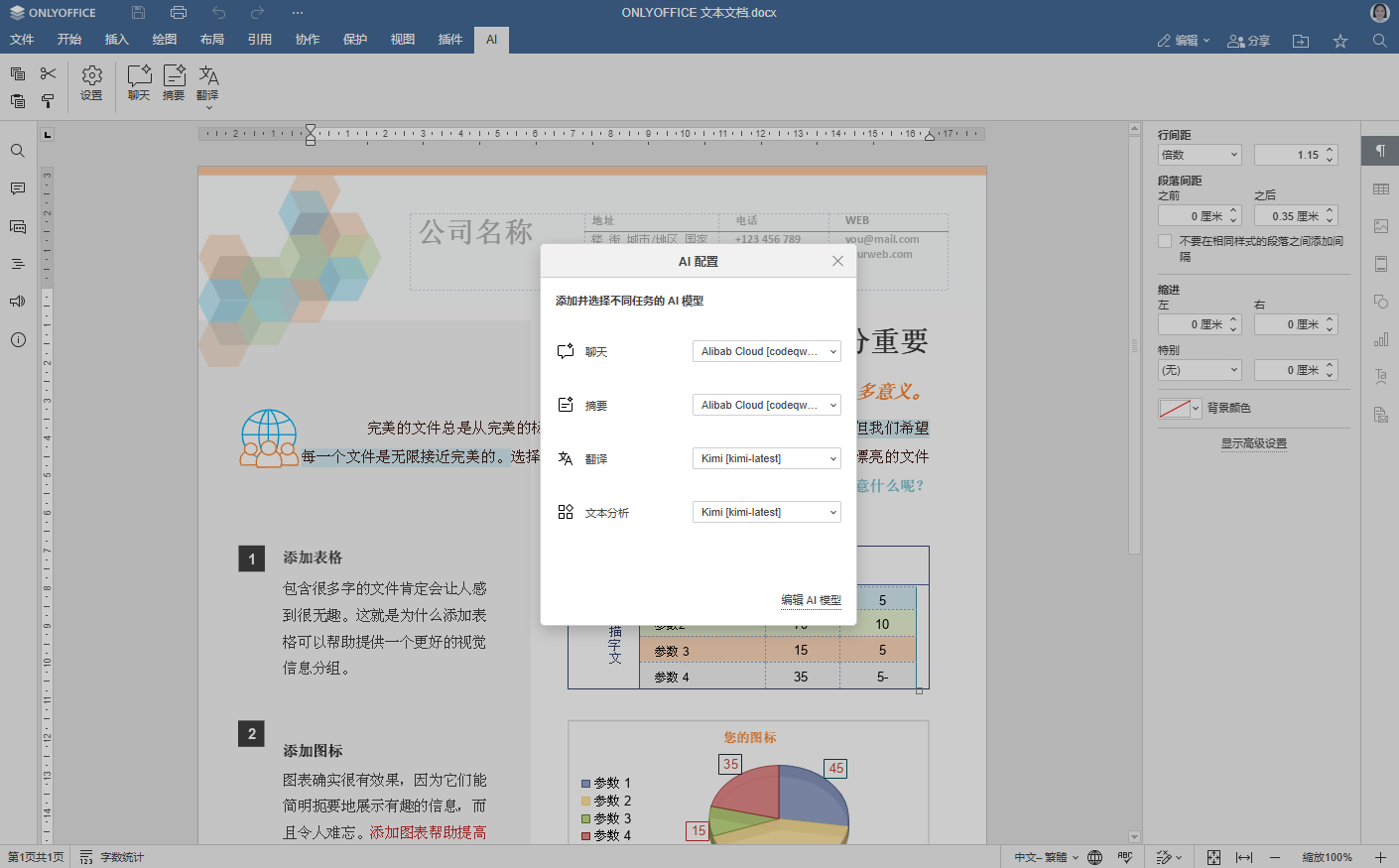
如何在ONLYOFFICE插件中添加自定义AI提供商:以通义千问和Kimi为例
随着 ONLYOFFICE AI 插件的发布,我们极大地提升了编辑器的默认功能。在ONLYOFFICE,我们致力于提供强大且灵活的解决方案,以满足您的特定需求。其中一项便是能够在 AI 插件中添加自定义提供商。在这篇文章中,我们将展示如何将通义千…...

Java基础-26-多态-认识多态
在Java编程中,多态(Polymorphism) 是面向对象编程的核心概念之一。通过多态,我们可以编写更加灵活、可扩展的代码。本文将详细介绍什么是多态、如何实现多态,并通过具体的例子来帮助你更好地理解这一重要概念。 一、什…...

Spark,配置hadoop集群1
配置运行任务的历史服务器 1.配置mapred-site.xml 在hadoop的安装目录下,打开mapred-site.xml,并在该文件里面增加如下两条配置。 eg我的是在hadoop199上 <!-- 历史服务器端地址 --> <property><name>mapreduce.jobhistory.address…...
)
【蓝桥杯算法练习】205. 反转字符串中的字符(含思路 + Python / C++ / Java代码)
【蓝桥杯算法练习】205. 反转字符串中的字符(含思路 Python / C / Java代码) 🧩 题目描述 给定一个字符串 s,请你将字符串中的 英文字母字符反转,但其他 非字母字符保持在原位置,输出处理后的字符串。 …...

FPGA实现4K MIPI视频解码H265压缩网络推流输出,基于IMX317+VCU架构,支持4K60帧,提供工程源码和技术支持
目录 1、前言工程概述免责声明 2、相关方案推荐我已有的所有工程源码总目录----方便你快速找到自己喜欢的项目我这里已有的 MIPI 编解码方案我这里已有的视频图像编解码方案 3、详细设计方案设计框图FPGA开发板IMX317摄像头MIPI D-PHYMIPI CSI-2 RX Subsystem图像预处理Sensor …...

【Linux】网络概念
目录 网络模型 OSI七层模型 TCP/IP五层(或四层)模型 网络传输 网络传输基本流程 封装与分用 以太网通信(局域网传输) 跨网络传输 网络模型 OSI七层模型 TCP/IP五层(或四层)模型 网络层和传输层就是操作系统的一部分 网络传输 网络传输基本流程…...

【模拟CMOS集成电路设计】电荷泵(Charge bump)设计与仿真(示例:栅极开关CP+轨到轨输入运放+基于运放CP)
【模拟CMOS集成电路设计】电荷泵(Charge bump)设计与仿真 0前言1电荷泵1.1 PFD/CP/电容器级联1.2 PFD/CP/电容传递函数 2基本电荷泵(CP)结构2.1“漏极开关”结构2.2“源极开关”结构2.3“栅极开关”结构 3 CP的设计与仿真13.1 P/N电流源失配仿真3.2 电荷…...

minecraft.service 文件配置
minecraft.service 文件配置 # /etc/systemd/system/minecraft.service [Unit] DescriptionMinecraft Fabric Server Afternetwork.target Wantsnetwork-online.target[Service] Usermcfabricuser Groupmcfabricuser WorkingDirectory/minecraft/1.21.1-fabric-server ExecStar…...

Kafka消息丢失全解析!原因、预防与解决方案
作为一名高并发系统开发工程师,在使用消息中间件的过程中,无法避免遇到系统中消息丢失的问题,而Kafka作为主流的消息队列系统,消息丢失问题尤为常见。 在这篇文章中,将深入浅出地分析Kafka消息丢失的各种情况…...

VS Code 云服务器远程开发完整指南
VS Code Ubuntu 云服务器远程开发完整指南 远程开发是现代开发者的标配之一,特别是在使用云服务器(如 Ubuntu)进行部署、测试或大项目开发时,利用 VS Code 的 Remote-SSH 插件,可以像本地一样顺滑操作远程服务器。本…...

Linux孤儿进程和僵尸进程
目录 1、孤儿进程 2、僵尸进程 在 Linux 系统中,父子进程关系的生命周期不同,导致会产生两类特殊进程:孤儿进程和僵尸进程。这两类进程在系统资源管理中起着重要作用。 1、孤儿进程 孤儿进程指的是父进程先于子进程结束,导致子…...

【Rtklib入门指南】4. 使用RTKLIB进行载波相位差分定位(RTK)
RTK RTK(Real-Time Kinematic,实时动态)定位技术是一种高精度的卫星导航技术。相比传统的GPS定位技术,RTK能够在厘米级别的精度范围内提供定位结果。这使得RTK技术在无人机、自动驾驶、工程测绘、农业机械自动化等领域具有广泛应用…...

【SECS】初识SECS协议
【SECS】初识SECS协议 基本知识流和功能函数数量官方文件中缩写标注正常是不是都是主机向设备端?对数据信息中第1字节第1-2位官网介绍 S1F1双向指令说明测试H发起端E发起端 参考资料 基本知识 SECS(SEMI Equipment Communications Standard)即半导体设…...

【C++项目】从零实现RPC框架「三」:项⽬抽象层实现
🌈 个人主页:Zfox_ 🔥 系列专栏:C++从入门到精通 目录 一:🔥 常⽤的零碎功能接⼝类实现🦋 简单⽇志宏实现🦋 Json 序列化/反序列化🦋 UUID ⽣成二:🔥 项⽬消息类型字段信息定义 🦋 请求字段宏定义🦋 消息类型定义🦋 响应码类型定义🦋 RPC 请求类型定…...

webcam video demo
一个 demo,使用 OpenCV,手动操作 webcam,保持相机打开,防止频繁的 开关损坏摄像头硬件。 这是ROS情景下的一个节点,展示了ROS节点的常见格式。代码很简单,单展示了持续视频流的发布,还展示了基…...

ARM-LDS链接文件
关键字 ALIGN 在链接脚本中,ALIGN关键字:ALIGN(X)中的X表示多少个字节对齐。 在汇编文件中,是伪操作 .align x 实现的:表示2的x次幂个字节对齐; 2.X的取值也是有讲究的,必须是2的整数次幂。例如…...

相机镜头景深
文章目录 定义影响因素实际应用特殊情况 参考:B站优致谱视觉 定义 景深是指在摄影机镜头或其他成像器前沿着能够取得清晰图像的成像器轴线所测定的物体距离范围。简单来说,就是在一张照片中,从前景到背景,能够保持清晰锐利的区域…...

Linux基础入门:从零开始掌握Linux命令行操作
🙋大家好!我是毛毛张! 🌈个人首页: 神马都会亿点点的毛毛张 🎈有没有觉得电影里的黑客🐒酷毙了?他们只用键盘⌨就能搞定一切。今天,毛毛张要带你们体验这种快感😀&…...

C++第13届蓝桥杯省b组习题笔记
1.九进制转十进制 九进制正整数 (2022)9转换成十进制等于多少? 第一位乘9的0次方,第二位乘9的1次方,第三位乘9的二次方以此类推 #include <iostream> using namespace std;int main() {// 请在此输入您的代码int t2022;int res0;int c…...

探索 Gaggol:理解 10^^^100 的宇宙级常数
一、常数概述: Gaggol 是一个极其巨大的数学常数,其数值表示为 10^^^100。这个常数是通过对数字 10 进行超递归幂运算得到的结果。 二、Gaggol 的定义: Gaggol 被定义为 10 的超多层超递归幂,即 10 被连续地提升到自身幂的层次达…...

python-leetcode 61.N皇后
题目: 按照国际象棋的规则,皇后可以攻击与之处在同一行或同一列或同一斜线上的棋子。 n 皇后问题 研究的是如何将 n 个皇后放置在 nn 的棋盘上,并且使皇后彼此之间不能相互攻击 给你一个整数 n ,返回所有不同的 n 皇后问题 的解…...