【Pytorch 中的扩散模型】去噪扩散概率模型(DDPM)的实现

介绍
广义上讲,扩散模型是一种生成式深度学习模型,它通过学习到的去噪过程来创建数据。扩散模型有很多变体,其中最流行的通常是文本条件模型,它可以根据提示生成特定的图像。一些扩散模型(例如 Control-Net)甚至可以将图像与特定的艺术风格融合。以下是一个例子:

如果您不知道图像有什么特别之处,请尝试远离屏幕或眯起眼睛来查看图像中隐藏的秘密。
扩散模型的应用和类型多种多样,但在本教程中,我们将构建基础的非条件扩散模型 DDPM(去噪扩散概率模型)[1]。我们将首先直观地了解该算法的底层工作原理,然后在 PyTorch 中从头构建它。此外,本教程将主要关注该算法背后的直观概念和具体的实现细节。关于数学推导和背景知识,这本书 [2] 是很好的参考资料。
最后说明:此实现是为包含单个 GPU 且兼容 CUDA 的工作流构建的。此外,完整的代码库可在此处找到:
工作原理 -> 正向和反向过程
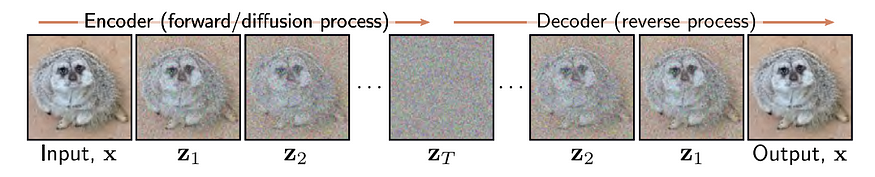
图片来自[2] 理解深度学习 作者:Simon JD Prince
扩散过程包括正向过程和逆向过程。正向过程是一个基于噪声表的预定马尔可夫链。噪声表是一组方差B1、B2、…BT,它们控制构成马尔可夫链的条件正态分布。

前向过程马尔可夫链 — 图片来自[2]
这个公式是前向过程的数学表示,但直观上我们可以将其理解为一个序列,我们逐渐将数据示例 X 映射到纯噪声。前向过程中的第一个项只是我们的初始数据示例。在中间时间步长 t,我们有一个带噪声的 X 版本,在最后的时间步长 T,我们得到纯噪声,它大致受标准正态分布的支配。在构建扩散模型时,我们会选择噪声计划。例如,在 DDPM 中,我们的噪声计划具有 1000 个时间步长,方差从 1e-4 线性增加到 0.02。还需要注意的是,我们的前向过程是静态的,这意味着我们选择噪声计划作为扩散模型的超参数,并且我们不会训练前向过程,因为它已经明确定义。还需要注意的是,我们的前向过程是静态的,这意味着我们选择噪声计划作为扩散模型的超参数,并且我们不训练前向过程,因为它已经被明确定义。
关于正向过程,我们必须了解的最后一个关键细节是:由于分布符合正态性,我们可以从数学上推导出一个称为“扩散核”的分布,它表示给定初始数据点,正向过程中任何中间值的分布。这使我们能够绕过在正向过程中迭代添加 t-1 级噪声的所有中间步骤,从而获得包含 t 个噪声的图像,这在以后训练模型时会派上用场。其数学表示为:

扩散核 — 图片来自[2]
其中时间 t 时的 alpha 定义为从初始时间步长到当前时间步长的累积乘积 (1-B)。
逆过程是扩散模型的关键。逆过程本质上是对正向过程的撤销,即逐步从纯噪声图像中去除一定量的噪声,从而生成新的图像。我们从纯噪声数据开始,在每个时间步 t 减去正向过程理论上在该时间步长上添加的噪声量。我们不断去除噪声,直到最终得到与原始数据分布相似的图像。我们的工作重点是训练一个模型,使其能够精确地逼近正向过程,从而估计能够生成新样本的逆向过程。
算法和训练目标
为了训练这样的模型来估计逆扩散过程,我们可以遵循下面定义的图像中的算法:
- 从我们的训练数据集中随机抽取一个数据点
- 在我们的噪声(方差)计划中选择一个随机时间步长
- 将该时间步的噪声添加到我们的数据中,通过“扩散核”模拟正向扩散过程
- 将我们的去噪图像传入模型,以预测我们添加的噪声
- 计算预测噪声和实际噪声之间的均方误差,并通过该目标函数优化模型参数
- 并重复!
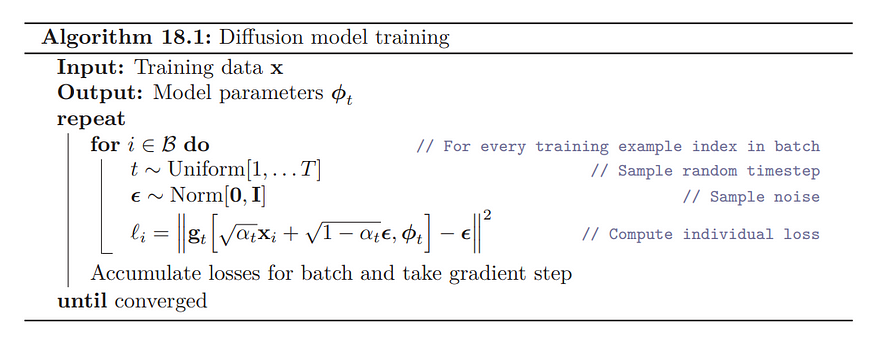
DDPM 训练算法——图片来自[2]
从数学上讲,如果没有看到完整的推导,算法中的确切公式一开始可能看起来有点奇怪,但直观地说,它是基于我们的噪声计划的 alpha 值的扩散核的重新参数化,它只是预测噪声和我们添加到图像的实际噪声的平方差。
如果我们的模型能够根据前向过程的特定时间步长成功预测噪声量,我们可以从时间步长 T 的噪声开始迭代,并根据每个时间步长逐渐消除噪声,直到我们恢复类似于原始数据分布中生成的样本的数据。
采样算法总结如下:
- 从标准正态分布中生成随机噪声
对于从上一个时间步开始并向后移动的每个时间步:
2. 通过估计逆过程分布来更新 Z,其中平均值由上一步的 Z 参数化,方差由我们的模型在该时间步估计的噪声参数化
3. 添加少量噪音以增加稳定性(解释如下)
4. 重复此操作,直到到达时间步 0,即我们恢复的图像!
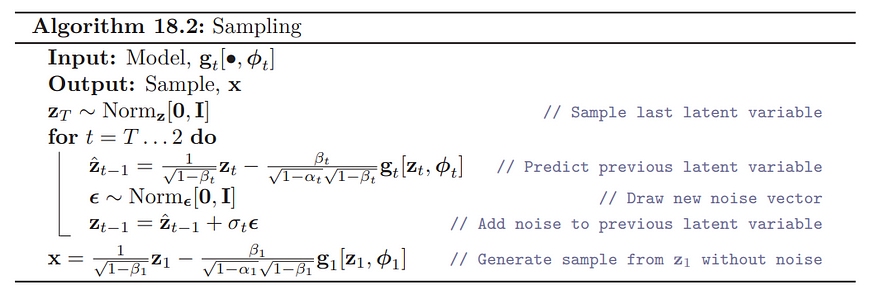
DDPM采样算法——图片来自[2]
随后采样并生成图像的算法在数学上可能看起来很复杂,但直观上可以归结为一个迭代过程:我们从纯噪声开始,估算在时间步 t 理论上添加的噪声,然后将其减去。如此反复,直到得到生成的样本。唯一需要注意的小细节是,在减去估算的噪声后,我们会再加回少量噪声,以保持过程稳定。例如,在迭代过程开始时一次性估算并减去总噪声会导致样本非常不连贯,因此实践证明,在每个时间步长上加回一点噪声并进行迭代可以生成更好的样本。
UNET
DDPM 论文的作者使用了最初为医学图像分割设计的 UNET 架构,构建了一个用于预测扩散逆过程噪声的模型。本教程中我们将使用的模型适用于 32x32 图像,非常适合 MNIST 等数据集,但该模型可以扩展以处理更高分辨率的数据。UNET 有很多变体,我们将要构建的模型架构概览如下图所示。
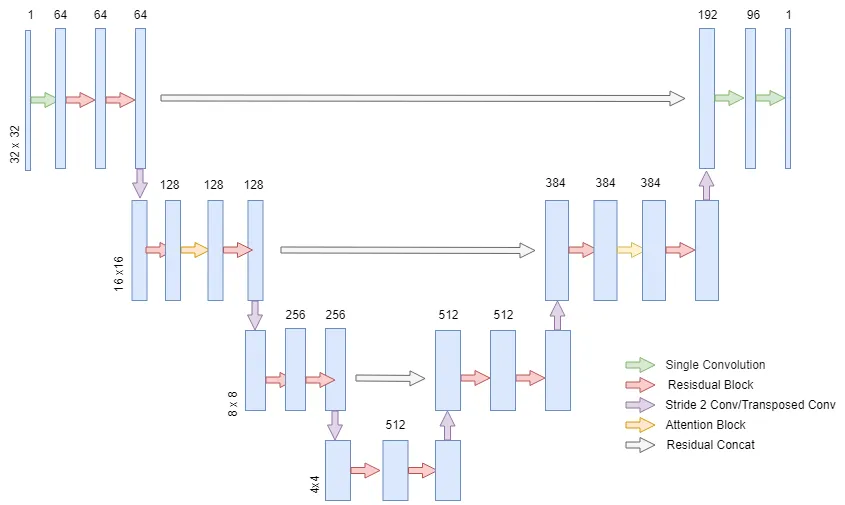
DDPM 的 UNET 与经典 UNET 类似,因为它包含下采样流和上采样流,从而减轻了网络的计算负担,同时在两个流之间具有跳过连接,以合并来自模型浅层和深层特征的信息。
DDPM UNET 与经典 UNET 的主要区别在于,DDPM UNET 在 16x16 维层中引入了注意力机制,并在每个残差块中嵌入了正弦 Transformer 嵌入。正弦嵌入背后的含义是告诉模型我们试图在哪个时间步预测噪声。这通过注入模型在噪声计划中所处位置的信息,帮助模型预测每个时间步的噪声。例如,如果我们有一个噪声计划,其中某些时间步包含大量噪声,那么模型了解它必须预测哪个时间步可以帮助模型预测相应时间步的噪声。对于那些还不熟悉 Transformer 架构的人来说,可以在这里 [3] 找到更多关于注意力机制和嵌入的一般信息。
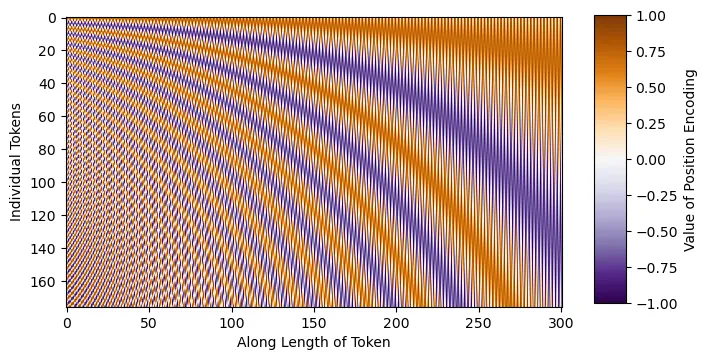
在模型实现中,我们将首先定义导入(pip install 命令已注释,仅供参考),并编写正弦时间步长的嵌入代码。直观地说,正弦嵌入是不同的正弦和余弦频率,可以直接添加到输入中,从而为模型提供额外的位置/顺序理解。如下图所示,每个正弦波都是独一无二的,这将使模型能够感知其在噪声表中的位置。
# 导入
import torch
import torch.nn as nn
import torch.nn . functional as F
from einops import rearrange #pip install einops
from Typing import List
import random
import math
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
from timm.utils import ModelEmaV3 #pip install timm
from tqdm import tqdm #pip install tqdm
import matplotlib.pyplot as plt #pip install matplotlib
import torch.optim as optim
import numpy as np class SinusoidalEmbeddings (nn.Module): def __init__ ( self, time_steps: int , embed_dim: int ): super ().__init__() position = torch.arange(time_steps).unsqueeze( 1 ). float()div = torch.exp(torch.arange(0, embed_dim,2)。float()* -(math.log(10000.0)/ embed_dim))embeddings = torch.zeros(time_steps,embed_dim,requires_grad = False)embeddings[:,0 :: 2 ] = torch.sin(position * div)embeddings[:,1 :: 2 ] = torch.cos(position * div)self.embeddings = embeddings def forward(self,x,t):embeds = self.embeddings[t].to(x.device)返回embeds[:,:,None,None ]UNET 每一层的残差块将与原始 DDPM 论文中使用的残差块相同。每个残差块将包含一个组范数序列、ReLU 激活函数、一个 3x3 的“相同”卷积、dropout 和一个跳跃连接。
# 残差块
class ResBlock (nn.Module): def __init__ ( self, C: int , num_groups: int , dropout_prob: float ): super ().__init__() self.relu = nn.ReLU(inplace= True ) self.gnorm1 = nn.GroupNorm(num_groups=num_groups, num_channels=C) self.gnorm2 = nn.GroupNorm(num_groups=num_groups, num_channels=C) self.conv1 = nn.Conv2d(C, C, kernel_size= 3 , padding= 1 ) self.conv2 = nn.Conv2d(C, C, kernel_size= 3 , padding= 1 ) self.dropout = nn.Dropout(p=dropout_prob, inplace= True ) def forward ( self, x, embeddings ): x = x + embeddings[:, :x.shape[ 1 ], :, :] r = self.conv1(self.relu(self.gnorm1(x))) r = self.dropout(r) r = self.conv2(self.relu(self.gnorm2(r)))返回r + x在 DDPM 中,作者在 UNET 的每一层(分辨率尺度)使用了 2 个残差块;对于 16x16 维度的层,我们在两个残差块之间加入了经典的 Transformer 注意力机制。现在,我们将为 UNET 实现注意力机制:
<span style="background-color:#f9f9f9"><span style="color:#242424"> self.proj2 = nn.Linear(C,C)self.num_heads = num_heads self.dropout_prob = dropout_prob ( ) x = self.proj1(x) x = rearrange(x, , K= , H=self.num_heads) q,k,v = x[ ], x[ , h=h, w=w) x = self.proj2(x) <span style="color:#c41a16">'bhw C -> b C h w'</span> )</span></span>注意力机制的实现非常简单。我们重塑数据,将 h*w 维度组合成一个“序列”维度,类似于 Transformer 模型的经典输入,并将通道维度转换为嵌入特征维度。在此实现中,我们使用 torch.nn. functional.scaled_dot_product_attention,因为此实现包含 Flash 注意力机制,它是注意力机制的优化版本,在数学上仍然等同于经典 Transformer 注意力机制。有关 Flash 注意力机制的更多信息,请参阅以下论文:[4]、[5]。
最后,我们可以定义UNET的完整层:
类 UnetLayer(nn.Module):def __init__(self,upscale:bool,attention:bool,num_groups:int,dropout_prob:float,num_heads:int,C:int):super()。__init__()self.ResBlock1 = ResBlock(C = C,num_groups = num_groups,dropout_prob = dropout_prob)self.ResBlock2 = ResBlock(C = C,num_groups = num_groups,dropout_prob = dropout_prob)如果upscale:self.conv = nn.ConvTranspose2d(C,C// 2,kernel_size = 4,stride = 2,padding = 1)否则:self.conv = nn.Conv2d(C,C * 2,kernel_size = 3,stride = 2, padding= 1)如果注意:self.attention_layer = Attention(C,num_heads=num_heads,dropout_prob=dropout_prob)def forward(self,x,embeddings):x = self.ResBlock1(x,embeddings)如果 hasattr(self,'attention_layer'):x = self.attention_layer(x)x = self.ResBlock2(x,embeddings)返回self.conv(x),x如前所述,DDPM 中的每一层都有 2 个残差块,并且可能包含一个注意力机制,我们还会将嵌入传递到每个残差块中。此外,我们还会返回下采样或上采样值以及先验值,我们将存储该值并将其用于残差级联跳跃连接。
最后,我们可以完成 UNET 课程:
类 UNET(nn.Module):def __init__(self,Channels:List = [ 64 , 128 , 256 , 512 , 512 , 384 ],Attentions:List = [ False , True , False , False , False , True ],Upscales:List = [ False , False , False , True , True , True ],num_groups:int = 32,dropout_prob:float = 0.1,num_heads:int = 8,input_channels:int = 1,output_channels:int = 1,time_steps:int = 1000):super()。__init__()self.num_layers = len(Channels)self.shallow_conv = nn.Conv2d(input_channels,通道[ 0 ],内核大小= 3,填充= 1)out_channels =(通道[- 1 ]// 2)+通道[ 0 ] self.late_conv = nn.Conv2d(out_channels,out_channels// 2,内核大小= 3,填充= 1)self.output_conv = nn.Conv2d(out_channels// 2,output_channels,内核大小= 1)self.relu = nn.ReLU(inplace = True)self.embeddings = SinusoidalEmbeddings(time_steps = time_steps,embed_dim = max(通道))对于范围内的 i (self.num_layers): layer = UnetLayer( upscale = Upscales [i], attention = Attentions [i], num_groups = num_groups, dropout_prob=dropout_prob, C=Channels[i], num_heads=num_heads )setattr(self,f'Layer {i + 1 } ',layer)def forward(self,x,t):x = self.shallow_conv(x)residuals = [] for i in range(self.num_layers // 2):layer = getattr(self,f'Layer {i + 1 } ')embeddings = self.embeddings(x,t)x,r = layer(x,embeddings)residuals.append(r)for i in range(self.num_layers // 2,self.num_layers):layer = getattr(self,f'Layer {i + 1 } ')x = torch.concat((layer(x,embeddings)[ 0 ],residuals[self.num_layers-i- 1 ]),dim= 1)return self.output_conv(self.relu(self.late_conv(x)))基于我们已经创建的类,实现起来非常简单。此实现的唯一区别在于,我们的上游通道比 UNET 的典型通道略大。我发现,这种架构在配备 16GB VRAM 的单 GPU 上训练效率更高。
调度程序
为 DDPM 编写噪声/方差调度程序也非常简单。在 DDPM 中,我们的调度将从 1e-4 开始,如前所述,以 0.02 结束,并呈线性增长。
类 DDPM_Scheduler(nn.Module):def __init__(self,num_time_steps:int = 1000):super()。__init__()self.beta = torch.linspace(1e- 4,0.02 ,num_time_steps,requires_grad = False ) alpha = 1 -self.beta self.alpha = torch.cumprod(alpha,dim = 0).requires_grad_(False)def forward(self,t):返回self.beta [t],self.alpha [t]我们返回 beta(方差)值和 alpha 值,因为我们的训练和采样公式使用这两个值都是基于它们的数学推导。
def set_seed(种子:int = 42):torch.manual_seed(种子)torch.cuda.manual_seed_all(种子)torch.backends.cudnn.deterministic = Truetorch.backends.cudnn.benchmark = Falsenp.random.seed(种子)random.seed(种子)此外(非必需),此函数定义了一个训练种子。这意味着,如果您想重现特定的训练实例,可以使用一组种子,这样每次使用相同的种子时,随机权重和优化器初始化都是相同的。
训练
为了实现这一目标,我们将创建一个模型来生成 MNIST 数据(手写数字)。由于 PyTorch 默认这些图像的尺寸为 28x28,因此我们将图像填充到 32x32,以遵循原始论文中在 32x32 图像上训练的方法。
为了进行优化,我们使用 Adam,初始学习率为 2e-5。我们还使用 EMA(指数移动平均线)来辅助提高生成质量。EMA 是模型参数的加权平均值,在推理时间内可以创建更平滑、噪声更低的样本。对于此实现,我使用了 timm 库的 EMAV3 开箱即用实现,权重为 0.9999,与 DDPM 论文中使用的相同。
总结一下我们的训练过程,我们只需遵循上面的伪代码即可。我们为批次随机选取时间步长,并根据这些时间步长的计划对批次中的数据进行噪声处理,然后将该批次的噪声图像与时间步长本身一起输入到 UNET 中,以指导正弦嵌入。我们使用伪代码中基于“扩散核”的公式对图像进行噪声处理。然后,我们将模型对噪声添加量的预测与实际添加的噪声进行比较,并优化噪声的均方误差。我们还实现了基本的检查点,以便在不同的时期暂停和恢复训练。
def train(batch_size:int = 64,num_time_steps:int = 1000,num_epochs:int = 15,seed:int = - 1,ema_decay:float = 0.9999, lr = 2e-5,checkpoint_path:str = None):set_seed(random.randint(0,2 ** 32 - 1))如果seed == - 1 ,则设置seed(seed) train_dataset = datasets.MNIST(root = '。/ data ',train = True,download = False,transform = transforms.ToTensor()) train_loader = DataLoader(train_dataset,batch_size = batch_size,shuffle = True,drop_last = True,num_workers = 4) scheduler = DDPM_Scheduler(num_time_steps=num_time_steps) model = UNET()。cuda() 优化器 = optim.Adam(model.parameters(,lr=lr) ema = ModelEmaV3(model,decay=ema_decay)如果checkpoint_path不为None: checkpoint = torch.load(checkpoint_path) model.load_state_dict(checkpoint [ 'weights' ]) ema.load_state_dict(checkpoint [ 'ema' ]) optimizer.load_state_dict(checkpoint [ 'optimizer' ]) criterion = nn.MSELoss(reduction= 'mean')对于范围内的i (num_epochs): total_loss = 0 for bidx,(x,_)在枚举中(tqdm(train_loader,desc= f“Epoch {i + 1 } / {num_epochs} “)): x = x.cuda() x = F.pad(x, ( 2 , 2 , 2 , 2 )) t = torch.randint( 0 ,num_time_steps,(batch_size,)) e = torch.randn_like(x, require_grad= False ) a = Scheduler.alpha[t].view(batch_size, 1 , 1 , 1 ).cuda() x = (torch.sqrt(a)*x) + (torch.sqrt( 1 -a)*e)输出 = 模型(x,t)优化器.zero_grad()损失 = 标准(输出,e) total_loss += loss.item() 损失.backward()优化器.step() ema.update(模型)打印( f'Epoch {i + 1 } | 损失{total_loss / ( 60000 /batch_size): .5 f} ' )检查点 = { '权重':模型.state_dict(),'优化器':优化器.state_dict(),'ema':ema.state_dict() } torch.save(检查点,'检查点/ddpm_checkpoint' )对于推理,我们完全遵循伪代码的另一部分。直观地说,我们只是将正向过程反转。我们从纯噪声开始,现在训练好的模型可以预测每个时间步的估计噪声,然后可以迭代地生成全新的样本。对于每个不同的噪声起点,我们可以生成一个不同的独特样本,该样本与原始数据分布相似,但又独一无二。本文并未推导推理公式,但开头链接的参考文献可以为想要深入了解的读者提供指导。
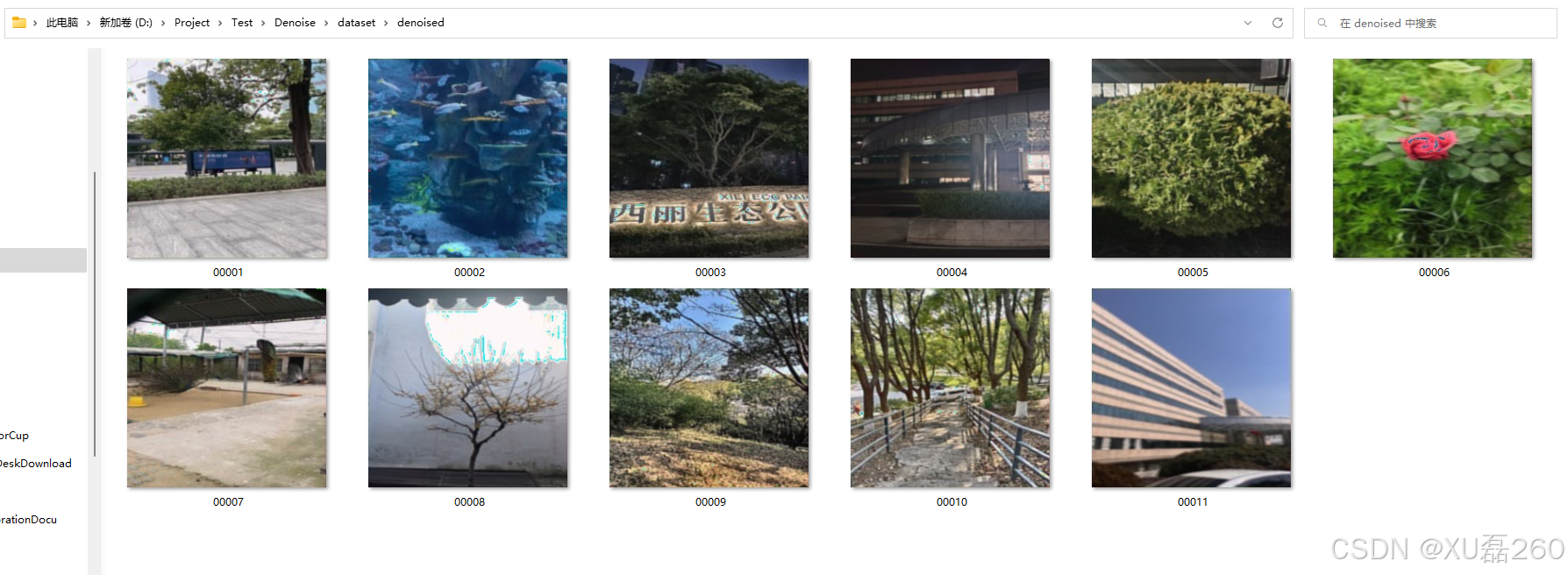
还要注意,我包含了一个辅助函数来查看漫射图像,以便您可以直观地看到模型学习逆向过程的程度。
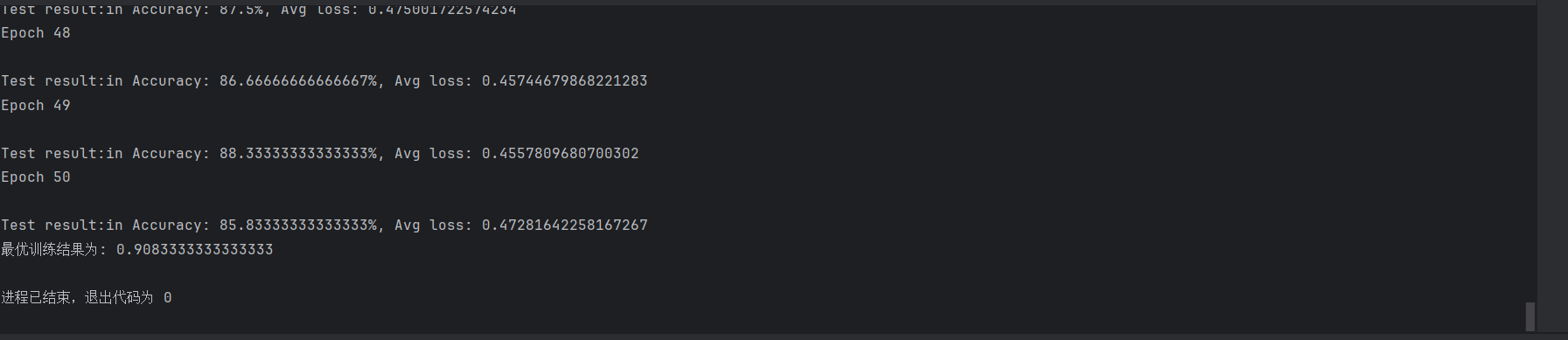
def display_reverse(images:List):fig,axes = plt.subplots(1,10 , figsize = ( 10,1 ))对于i,ax in enumerate ( axes.flat): x = images[i].squeeze(0 ) x = rearrange(x,'chw -> hw c') x = x.numpy() ax.imshow(x) ax.axis('off') plt.show()def inference(checkpoint_path:str = None, num_time_steps:int = 1000, ema_decay:float = 0.9999,): checkpoint = torch.load(checkpoint_path) model = UNET()。cuda() model.load_state_dict(checkpoint [ 'weights') ema = ModelEmaV3(model,decay = ema_decay) ema.load_state_dict(checkpoint [ ' ema ' ])调度程序 = DDPM_Scheduler(num_time_steps = num_time_steps )时间= [ 0,15,50,100,200,300,400,550,700,999 ]图像 = [ ]与torch.no_grad ():模型= ema.module 。eval ()对于范围(10 )内的i : z = torch.randn( 1 , 1 , 32 , 32 )对于反转的t (范围(1,num_time_steps)): t = [t] temp = (scheduler.beta[t]/( (torch.sqrt( 1 -scheduler.alpha[t]))*(torch.sqrt( 1 -scheduler.beta[t])) )) z = ( 1 /(torch.sqrt( 1 -scheduler.beta[t])))*z - (temp*model(z.cuda(),t).cpu())如果t[ 0 ]在时间中: images.append(z) e = torch.randn( 1 , 1 , 32 ,32 ) z = z + (e*torch.sqrt(scheduler.beta[t])) temp = Scheduler.beta[ 0 ]/( (torch.sqrt( 1 -scheduler.alpha[ 0 ]))*(torch.sqrt( 1 -scheduler.beta[ 0 ])) ) x = ( 1 /(torch.sqrt( 1 -scheduler.beta[ 0 ])))*z - (temp*model(z.cuda(),[ 0 ]).cpu()) images.append(x) x = rearrange(x.squeeze( 0 ), 'chw -> hw c' ).detach() x = x.numpy() plt.imshow(x) plt.show() display_reverse(images) images = []def main():训练(checkpoint_path = 'checkpoints / ddpm_checkpoint',lr = 2e-5,num_epochs = 75)推理('checkpoints / ddpm_checkpoint')如果__name__ == '__main__':main()按照上面列出的实验细节进行 75 个 epoch 训练后,我们得到了以下结果:
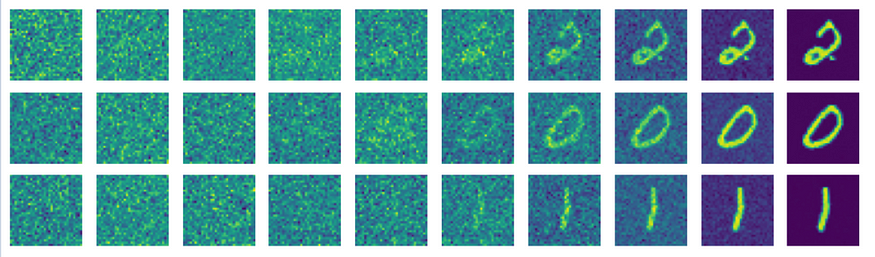
此时,我们刚刚在 PyTorch 中从头开始编写了 DDPM 代码!
相关文章:
【Pytorch 中的扩散模型】去噪扩散概率模型(DDPM)的实现
介绍 广义上讲,扩散模型是一种生成式深度学习模型,它通过学习到的去噪过程来创建数据。扩散模型有很多变体,其中最流行的通常是文本条件模型,它可以根据提示生成特定的图像。一些扩散模型(例如 Control-Net࿰…...
121.在 Vue3 中使用 OpenLayers 实现去掉鼠标右键默认菜单并显示 Feature 信息
🎯 实现效果 👇 本文最终实现的效果如下: ✅ 地图初始化时绘制一个多边形; ✅ 鼠标 右键点击地图任意位置; ✅ 若命中 Feature,则弹出该图形的详细信息; ✅ 移除浏览器默认的右键菜单,保留地图交互的完整控制。 💡 整个功能基于 Vue3 + OpenLayers 完成,采用 Com…...

仓颉造字,亦可造AI代理
CangjieMagic入门教程 本文将为您提供一份关于CangjieMagic代码库的详细入门教程,CangjieMagic托管于GitCode - 全球开发者的开源社区,开源代码托管平台。这是一个基于仓颉编程语言的LLM(大语言模型)Agent开发平台,具有独特的Age…...
进阶篇 第 6 篇:时间序列遇见机器学习与深度学习
进阶篇 第 6 篇:时间序列遇见机器学习与深度学习 (图片来源: Tara Winstead on Pexels) 在上一篇中,我们探讨了如何通过精心的特征工程,将时间序列预测问题转化为机器学习可以处理的监督学习任务。我们学习了如何创建滞后特征、滚动统计特征…...

【音视频】音频解码实战
音频解码过程 ⾳频解码过程如下图所示: FFmpeg流程 关键函数 关键函数说明: avcodec_find_decoder:根据指定的AVCodecID查找注册的解码器。av_parser_init:初始化AVCodecParserContext。avcodec_alloc_context3:为…...
DOCA介绍
本文分为两个部分: DOCA及BlueField介绍如何运行DOCA应用,这里以DNS_Filter为例子做大致介绍。 DOCA及BlueField介绍: 现代企业数据中心是软件定义的、完全可编程的基础设施,旨在服务于跨云、核心和边缘环境的高度分布式应用工作…...
# 利用迁移学习优化食物分类模型:基于ResNet18的实践
利用迁移学习优化食物分类模型:基于ResNet18的实践 在深度学习的众多应用中,图像分类一直是一个热门且具有挑战性的领域。随着研究的深入,我们发现利用预训练模型进行迁移学习是一种非常有效的策略,可以显著提高模型的性能&#…...

洗车小程序系统前端uniapp 后台thinkphp
洗车小程序系统 前端uniapp 后台thinkphp 支持多门店 分销 在线预约 套餐卡等...
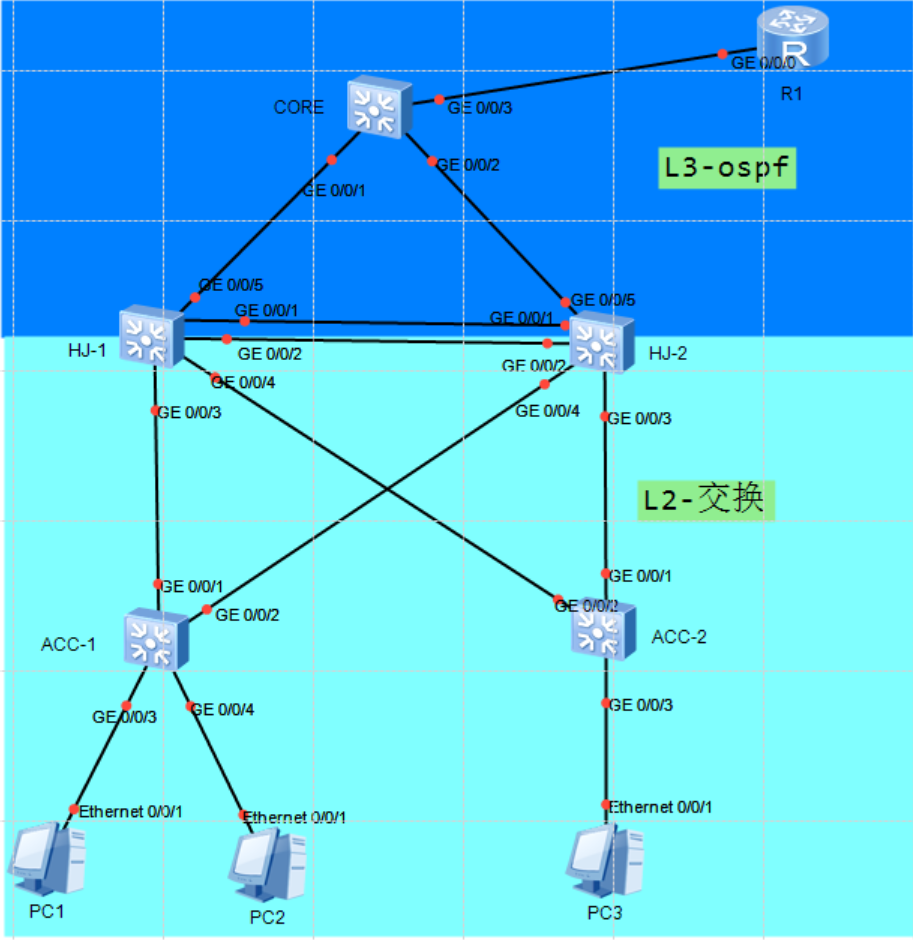
HCIP(综合实验2)
1.实验拓补图 2.实验要求 1.根据提供材料划分VLAN以及IP地址,PC1/PC2属于生产一部员工划分VLAN10,PC3属于生产二部划分VLAN20 2.HJ-1HJ-2交换机需要配置链路聚合以保证业务数据访问的高带宽需求 3.VLAN的放通遵循最小VLAN透传原则 4.配置MSTP生成树解决二层环路问题…...

Linux mmp文件映射补充(自用)
addr一般为NULL由OS指明,length所需长度(4kb对齐),prot(权限,一般O_RDWR以读写), flag(MAP_SHARED(不刷新到磁盘上,此进程独有)和MAP_PRIVATE(刷新…...
单元测试学习笔记(一)
自动化测试 通过测试工具/编程模拟手动测试步骤,全自动半自动执行测试用例,对比预期输出和实际输出,记录并统计测试结果,减少重复的工作量。 单元测试 针对最小的单元测试,Java中就是一个一个的方法就是一个一个的单…...

【深度学习新浪潮】新视角生成的研究进展调研报告(2025年4月)
新视角生成(Novel View Synthesis)是计算机视觉与图形学领域的核心技术,旨在从单张或稀疏图像中生成任意视角的高保真图像,突破传统多视角数据的限制,实现对三维场景的自由探索。作为计算机视觉与图形学的交叉领域,近新视角生成年来在算法创新、应用落地和工具生态上均取…...
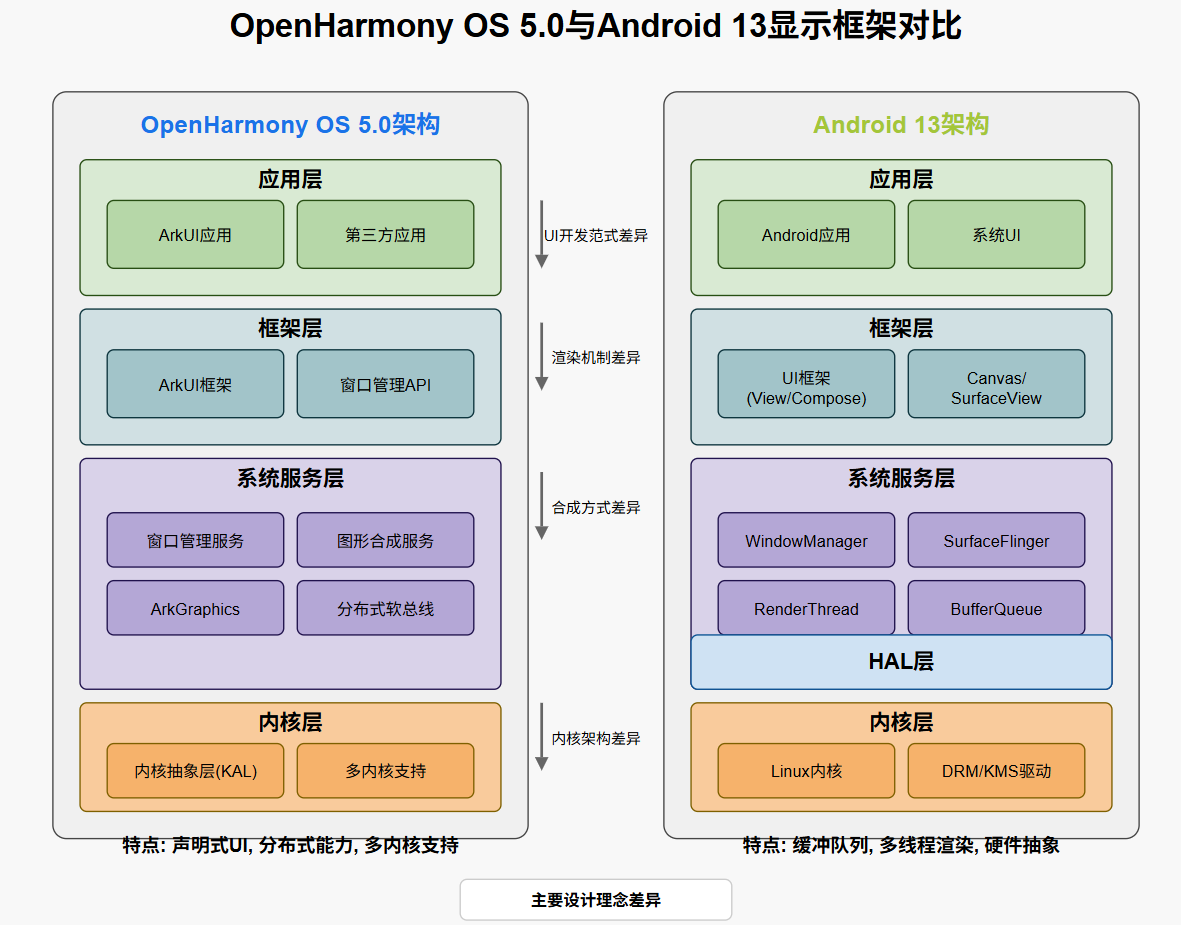
OpenHarmony OS 5.0与Android 13显示框架对比
1. 架构概述 1.1 OpenHarmony OS 5.0架构 OpenHarmony OS 5.0采用分层架构设计,图形显示系统从底层到顶层包括: 应用层:ArkUI应用和第三方应用框架层:ArkUI框架、窗口管理API系统服务层:图形合成服务、窗口管理服务…...
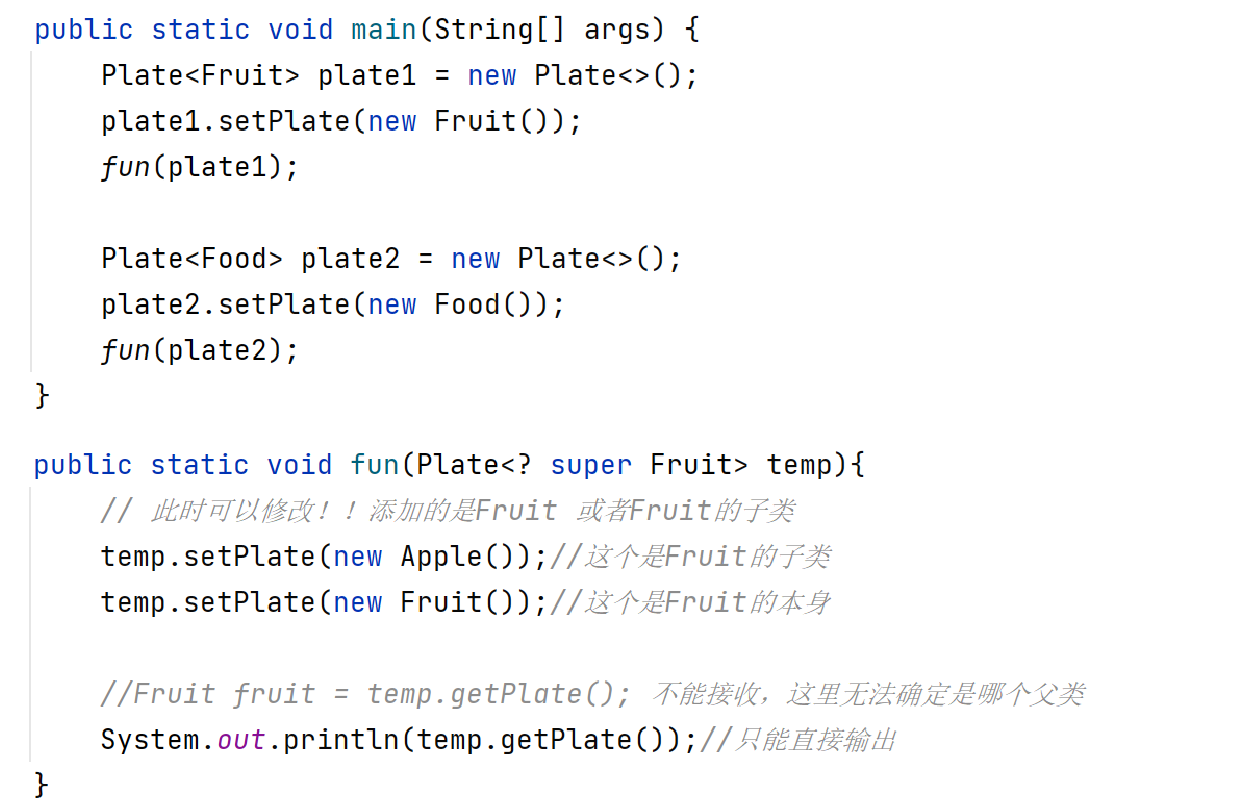
[Java] 泛型
目录 1、初识泛型 1.1、泛型类的使用 1.2、泛型如何编译的 2、泛型的上界 3、通配符 4、通配符上界 5、通配符下界 1、初识泛型 泛型:就是将类型进行了传递。从代码上讲,就是对类型实现了参数化。 泛型的主要目的:就是指定当前的容器…...
...)
Vue3 项目中零成本接入 AI 能力(以图搜图、知识问答、文本匹配)...
以下是在 Vue3 项目中零成本接入 AI 能力(以图搜图、知识问答、文本匹配)的完整解决方案,结合免费 API 和开源工具实现,无需服务器或付费服务: 一、以图搜图(基于 Hugging Face CLIP 模型) 核心思路 通过 Hugging Face Inference API 调用 CLIP 模型,将图片转换为向…...
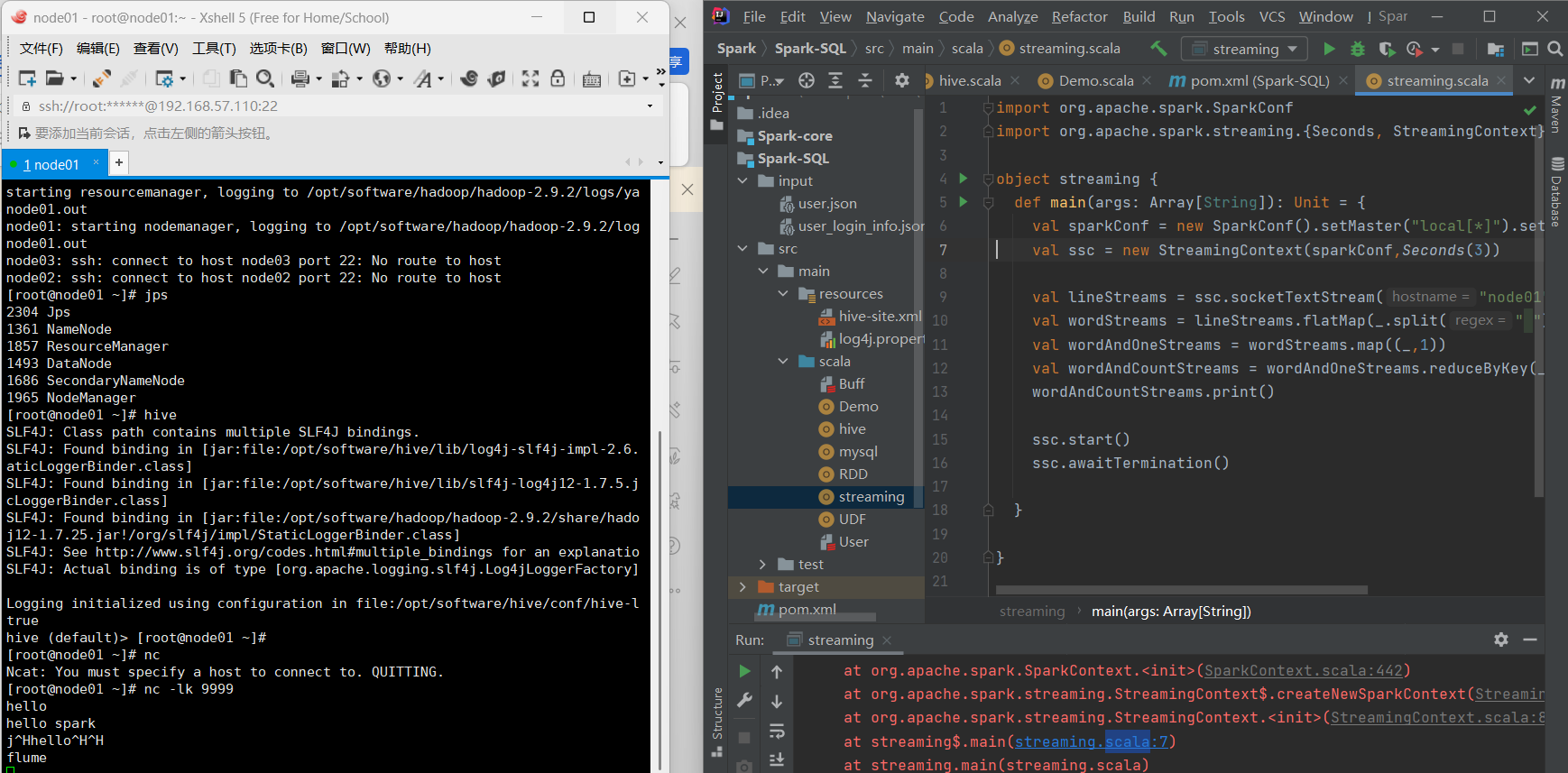
Spark–steaming
实验项目: 找出所有有效数据,要求电话号码为11位,但只要列中没有空值就算有效数据。 按地址分类,输出条数最多的前20个地址及其数据。 代码讲解: 导包和声明对象,设置Spark配置对象和SparkContext对象。 使用Spark S…...

【目标检测】对YOLO系列发展的简单理解
目录 1.YOLOv12.YOLOv23.YOLOv34.YOLOv45.YOLOv66.YOLOv77.YOLOv9 YOLO系列文章汇总: 【论文#目标检测】You Only Look Once: Unified, Real-Time Object Detection 【论文#目标检测】YOLO9000: Better, Faster, Stronger 【论文#目标检测】YOLOv3: An Incremental …...

前端框架的“快闪“时代:我们该如何应对技术迭代的洪流?
引言:前端开发者的"框架疲劳" “上周刚学完Vue 3的组合式API,这周SolidJS又火了?”——这恐怕是许多前端开发者2023年的真实心声。前端框架的迭代速度已经达到了令人目眩的程度,GitHub每日都有新框架诞生,n…...
深度学习训练中的显存溢出问题分析与优化:以UNet图像去噪为例
最近在训练一个基于 Tiny-UNet 的图像去噪模型时,我遇到了经典但棘手的错误: RuntimeError: CUDA out of memory。本文记录了我如何从复现、分析,到逐步优化并成功解决该问题的全过程,希望对深度学习开发者有所借鉴。 训练数据&am…...

Python爬虫实战:获取优志愿专业数据
一、引言 在信息爆炸的当下,数据成为推动各领域发展的关键因素。优志愿网站汇聚了丰富的专业数据,对于教育研究、职业规划等领域具有重要价值。然而,为保护自身数据和资源,许多网站设置了各类反爬机制。因此,如何高效、稳定地从优志愿网站获取计算机专业数据成为一个具有…...

2025.4.22学习日记 JavaScript的常用事件
在 JavaScript 里,事件是在文档或者浏览器窗口中发生的特定交互瞬间,例如点击按钮、页面加载完成等等。下面是一些常用的事件以及案例: 1. click 事件 当用户点击元素时触发 const button document.createElement(button); button.textCo…...
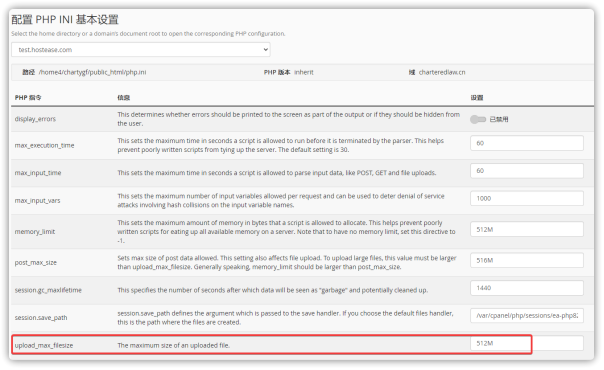
如何修复WordPress中“您所关注的链接已过期”的错误
几乎每个管理WordPress网站的人都可能遇到过“您关注的链接已过期”的错误,尤其是在上传插件或者主题的时候。本文将详细解释该错误出现的原因以及如何修复,帮助您更好地管理WordPress网站。 为什么会出现“您关注的链接已过期”的错误 为了防止资源被滥…...

从零开始搭建Django博客①--正式开始前的准备工作
本文主要在Ubuntu环境上搭建,为便于研究理解,采用SSH连接在虚拟机里的ubuntu-24.04.2-desktop系统搭建的可视化桌面,涉及一些文件操作部分便于通过桌面化进行理解,最后的目标是在本地搭建好系统后,迁移至云服务器并通过…...
健身房管理系统(springboot+ssm+vue+mysql)含运行文档
健身房管理系统(springbootssmvuemysql)含运行文档 健身房管理系统是一个全面的解决方案,旨在帮助健身房高效管理其运营。系统提供多种功能模块,包括会员管理、员工管理、会员卡管理、教练信息管理、解聘管理、健身项目管理、指导项目管理、健身器材管理…...

Java从入门到“放弃”(精通)之旅——继承与多态⑧
Java从入门到“放弃”(精通)之旅🚀——继承与多态⑧ 一、继承:代码复用的利器 1.1 为什么需要继承? 想象一下我们要描述狗和猫这两种动物。如果不使用继承,代码可能会是这样: // Dog.java pu…...
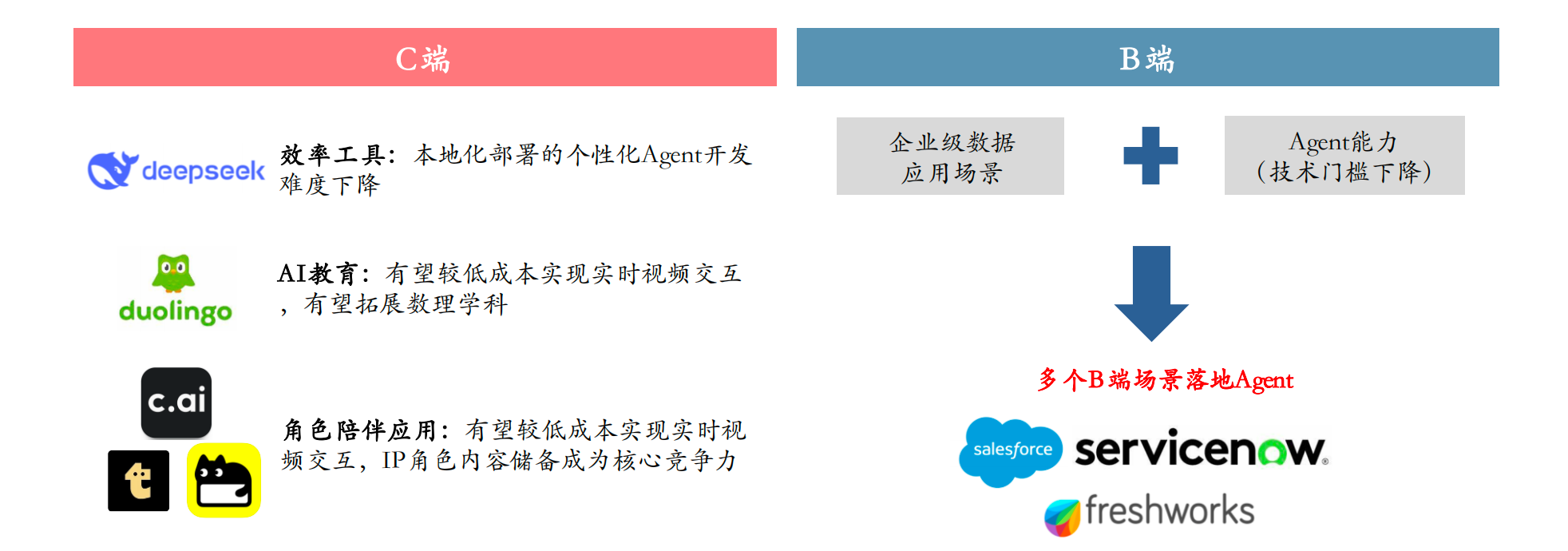
DeepSeek开源引爆AI Agent革命:应用生态迎来“安卓时刻”
开源低成本:AI应用开发进入“全民时代” 2025年初,中国AI领域迎来里程碑事件——DeepSeek开源模型的横空出世,迅速在全球开发者社区掀起热潮。其R1和V3模型以超低API成本(仅为GPT-4o的2%-10%)和本地化部署能力&#x…...

使用 LangChain + Higress + Elasticsearch 构建 RAG 应用
RAG(Retrieval Augmented Generation,检索增强生成) 是一种结合了信息检索与生成式大语言模型(LLM)的技术。它的核心思想是:在生成模型输出内容之前,先从外部知识库或数据源中检索相关信息&…...

深入解析C++ STL List:双向链表的特性与高级操作
一、引言 在C STL容器家族中,list作为双向链表容器,具有独特的性能特征。本文将通过完整代码示例,深入剖析链表的核心操作,揭示其底层实现机制,并对比其他容器的适用场景。文章包含4000余字详细解析,适合需…...

Uniapp:pages.json页面路由
目录 一、pages二、style 一、pages uni-app 通过 pages 节点配置应用由哪些页面组成,pages 节点接收一个数组,数组每个项都是一个对象,其属性值如下: 属性类型默认值描述pathString配置页面路径styleObject配置页面窗口表现nee…...

Self-Ask:LLM Agent架构的思考模式 | 智能体推理框架与工具调用实践
作为程序员,我们习惯将复杂问题分解为可管理的子任务,这正是递归和分治算法的核心思想。那么,如何让AI模型也具备这种结构化思考能力?本文深入剖析Self-Ask推理模式的工作原理、实现方法与最佳实践,帮助你构建具有清晰…...