ROS2---时间戳对齐
一、ROS2时间系统架构
-
时间模型
- 仿真时间(Simulation Time):由
/clock话题驱动,适用于离线仿真与调试。 - 真实时间(Real Time):基于系统硬件时钟,支持PTP协议(IEEE 1588)实现纳秒级同步。
- 时间源管理:通过
Clock节点统一管理时间源,支持动态切换仿真/真实时间。
- 仿真时间(Simulation Time):由
-
时间戳表示
builtin_interfaces/Time:包含秒和纳秒字段,精度达纳秒级。- 硬件时间戳:传感器驱动需直接从硬件计数器获取时间(如IMU的硬件时间戳),并通过
rmw_uros_sync_session等API转换为ROS时间。
二、硬件同步方案(精度<10μs)
-
PTP(精确时间协议)
- 配置步骤:
- 启用Cyclone DDS的PTP功能:
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp export CYCLONEDDS_URI=file:///path/to/cyclonedds.xml - 在
cyclonedds.xml中配置PTP参数:<Domain id="0"><General><NetworkInterface address="eth0"/><ClockSynchronization><Ptp enabled="true" domainNumber="0"/></ClockSynchronization></General> </Domain>
- 启用Cyclone DDS的PTP功能:
- 优势:跨设备同步精度达100ns,支持多机器人协作。
- 配置步骤:
-
硬件触发同步
- 原理:通过GPIO触发信号强制传感器同时采集数据。
- 代码示例(相机节点):
import rclpy from rclpy.node import Node from sensor_msgs.msg import Image import RPi.GPIO as GPIOclass TriggerCameraNode(Node):def __init__(self):super().__init__('trigger_camera')self.publisher_ = self.create_publisher(Image, 'camera/image', 10)GPIO.setmode(GPIO.BCM)GPIO.setup(18, GPIO.IN, pull_up_down=GPIO.PUD_UP)self.timer = self.create_timer(0.033, self.trigger_callback)def trigger_callback(self):if GPIO.input(18) == GPIO.LOW:msg = Image()msg.header.stamp = self.get_clock().now().to_msg()self.publisher_.publish(msg) - 适用场景:高速动态场景(如无人机避障)。
三、软件同步方案(精度1-10ms)
-
message_filters库- ExactTime策略:
import rclpy from rclpy.node import Node from sensor_msgs.msg import Image, Imu import message_filtersclass ExactSyncNode(Node):def __init__(self):super().__init__('exact_sync')self.camera_sub = message_filters.Subscriber(self, Image, 'camera/image')self.imu_sub = message_filters.Subscriber(self, Imu, 'imu/data')self.synchronizer = message_filters.TimeSynchronizer([self.camera_sub, self.imu_sub], 10)self.synchronizer.registerCallback(self.sync_callback)def sync_callback(self, img_msg, imu_msg):# 处理同步后的数据pass - ApproximateTime策略:
class ApproxSyncNode(Node):def __init__(self):super().__init__('approx_sync')self.camera_sub = message_filters.Subscriber(self, Image, 'camera/image')self.imu_sub = message_filters.Subscriber(self, Imu, 'imu/data')self.synchronizer = message_filters.ApproximateTimeSynchronizer([self.camera_sub, self.imu_sub], 10, 0.01) # 10ms时间窗口self.synchronizer.registerCallback(self.sync_callback)
- ExactTime策略:
-
时间偏移校准
- 在线校准算法(基于VINS-Mono):
class TimeCalibrator:def __init__(self):self.t_offset = 0.0 # 初始时间偏移def calibrate(self, img_msg, imu_msg):dt = (img_msg.header.stamp.sec - imu_msg.header.stamp.sec) + \(img_msg.header.stamp.nanosec - imu_msg.header.stamp.nanosec) * 1e-9self.t_offset = 0.9 * self.t_offset + 0.1 * dt # 一阶低通滤波return self.t_offset
- 在线校准算法(基于VINS-Mono):
四、时间校准与补偿
-
动态参数校准
- 通过参数服务器更新延迟:
import rclpy from rclpy.node import Node from rcl_interfaces.msg import ParameterDescriptorclass DynamicCalibrationNode(Node):def __init__(self):super().__init__('dynamic_calibration')self.declare_parameter('sensor_delay', 0.0, ParameterDescriptor(description='Sensor delay in seconds'))self.timer = self.create_timer(1.0, self.calibrate_callback)def calibrate_callback(self):delay = self.get_parameter('sensor_delay').value# 使用delay进行时间补偿
- 通过参数服务器更新延迟:
-
硬件延迟补偿
- 传感器驱动中添加固定延迟:
# 相机驱动示例 def capture_image(self):hardware_time = self.get_hardware_timestamp()ros_time = hardware_time + self.delay # 补偿固定延迟return Image(header=Header(stamp=ros_time))
- 传感器驱动中添加固定延迟:
五、分布式时间同步
-
全局时间服务器
- NTP同步:
sudo apt-get install ntp sudo ntpdate pool.ntp.org - PTP同步:
sudo systemctl enable ptp4l sudo systemctl start ptp4l
- NTP同步:
-
跨域通信
- DDS域ID配置:
export ROS_DOMAIN_ID=5 # 节点A export ROS_DOMAIN_ID=10 # 节点B - QoS策略:
from rclpy.qos import QoSProfile, QoSReliabilityPolicyqos = QoSProfile(reliability=QoSReliabilityPolicy.RELIABLE,history=QoSHistoryPolicy.KEEP_LAST,depth=10 )
- DDS域ID配置:
六、实时性配置
-
RTOS支持
- Micro-ROS:
# 嵌入式设备代码 import rclc from rclc.executor import RclcExecutor from rmw_uros_typesupport_cpp import rmw_uros_get_zero_initialized_publisherexecutor = RclcExecutor() node = rclc_node_init_default("micro_ros_node", "", None) publisher = rmw_uros_get_zero_initialized_publisher(node, ...) executor.add_node(node) while True:executor.spin_once()
- Micro-ROS:
-
线程优先级
- 设置节点优先级:
import rclpy from rclpy.node import Node import threadingclass HighPriorityNode(Node):def __init__(self):super().__init__('high_priority_node')thread = threading.Thread(target=self.run, daemon=True)thread.setschedparam(0, 99) # 设置实时优先级thread.start()def run(self):while True:# 高优先级任务
- 设置节点优先级:
七、典型应用场景
-
自动驾驶
- 激光雷达(10Hz)与摄像头(30Hz)同步:
- 硬件触发:通过PPS脉冲同步采集。
- 软件插值:使用
ApproximateTimeSynchronizer匹配±5ms内的数据。
- 激光雷达(10Hz)与摄像头(30Hz)同步:
-
医疗机器人
- 力觉传感器(1kHz)与视觉(30Hz)同步:
- 动态校准:通过卡尔曼滤波估计时间偏移。
- 实时性配置:使用RTOS确保控制周期稳定。
- 力觉传感器(1kHz)与视觉(30Hz)同步:
-
无人机导航
- IMU(1kHz)与视觉(30Hz)同步:
- 在线校准:在VIO系统中动态调整时间偏移。
- 硬件同步:通过PTP协议实现跨设备同步。
- IMU(1kHz)与视觉(30Hz)同步:
八、最佳实践与优化建议
-
硬件同步优先:
- 对于高动态场景(如无人机),优先采用PTP或硬件触发。
- 实验数据:硬件同步可将时间偏差控制在10μs以内,而软件同步通常存在1-10ms误差。
-
软件同步参数调优:
- 根据传感器频率设置队列长度和时间窗口(如IMU 1000Hz,队列长度设为100,时间窗口设为0.1s)。
-避免使用过大的时间窗口,防止引入过时数据。
- 根据传感器频率设置队列长度和时间窗口(如IMU 1000Hz,队列长度设为100,时间窗口设为0.1s)。
-
在线校准机制:
- 在VIO系统中集成时间偏移校准模块,动态调整传感器时间戳。
- 典型校准频率:10Hz,可将时间偏差收敛至5ms以内。
-
DDS QoS优化:
- 可靠性设置:对关键数据(如控制指令)使用
RELIABLE,对非关键数据(如日志)使用BEST_EFFORT。 - 持久性设置:对历史数据使用
TRANSIENT_LOCAL,确保新节点加入后可获取历史数据。
- 可靠性设置:对关键数据(如控制指令)使用
九、总结
ROS2的时间戳对齐是多传感器融合的核心技术,其实现涉及硬件同步、软件算法、通信协议和实时性配置等多个层面。通过硬件触发、PTP协议、message_filters库和动态校准算法的组合方案,可实现高精度的时间对齐。实际应用中,需根据场景需求选择合适的同步策略,并通过参数调优和在线校准进一步提升系统鲁棒性。忽视时间对齐可能导致定位失效、控制延迟甚至安全事故,而成熟的同步方案(如ROS2的时间同步工具链)能显著提升机器人系统的可靠性与性能。
相关文章:

ROS2---时间戳对齐
一、ROS2时间系统架构 时间模型 仿真时间(Simulation Time):由/clock话题驱动,适用于离线仿真与调试。真实时间(Real Time):基于系统硬件时钟,支持PTP协议(IEEE 1588&…...

Sublime Text相关设置
一直知道Sublime Text的自由度很高,但是之前使用从未更改过配置,有一天突然想改改设置试一下,感觉打开了新大陆,特此记录一下 设置默认语法 单击 Tools→Developer→New Snippet 弹出一个窗口,把下面这段代码粘贴进去…...
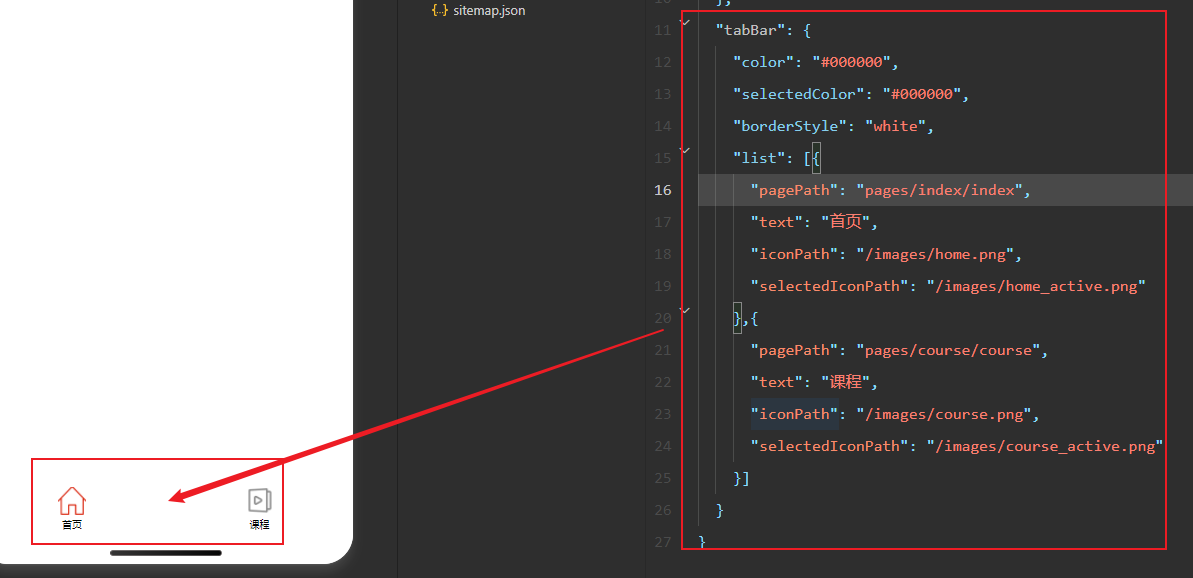
微信小程序 tabbar底部导航栏
官方文档:https://developers.weixin.qq.com/miniprogram/dev/reference/configuration/app.html#tabBar 一、常规菜单格式 在app.json 文件中配置,其他关键点详见官方文档,后续更新不规则图标的写法...

【Maven】项目管理工具
Maven:一个项目管理工具 前言 传统项目管理存在的问题: 依赖管理混乱 需要自己去网上搜 jar 包,找对版本很痛苦(还容易找错)某个库依赖另一个库(传递依赖),你得自己挨个找齐不小心…...

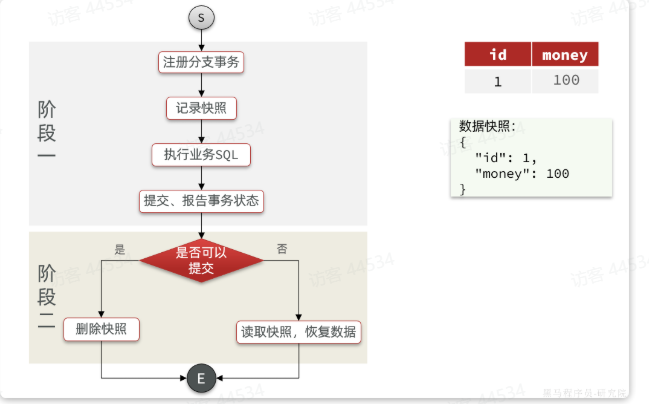
多线程事务?拿捏!
场景:有一批1万或者10万数据,插入数据库,怎么做 事务中进行批量提交 publList<List<OrderPo>> partition Lists.partition(list, 450);StopWatch stopWatch new StopWatch();stopWatch.start();// 顺序插入for (List<OrderPo> sub…...
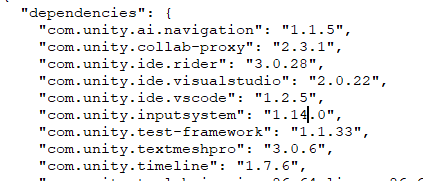
Unity InputSystem触摸屏问题
最近把Unity打包后的windows软件放到windows触摸屏一体机上测试,发现部分屏幕触摸点击不了按钮,测试了其他应用程序都正常。 这个一体机是这样的,一个电脑机箱,外接一个可以触摸的显示屏,然后UGUI的按钮就间歇性点不了…...

Linux Awk 深度解析:10个生产级自动化与云原生场景
看图猜诗,你有任何想法都可以在评论区留言哦~ 摘要 Awk 作为 Linux 文本处理三剑客中的“数据工程师”,凭借字段分割、模式匹配和数学运算三位一体的能力,成为处理结构化文本(日志、CSV、配置文件)的终极工具。本文聚…...
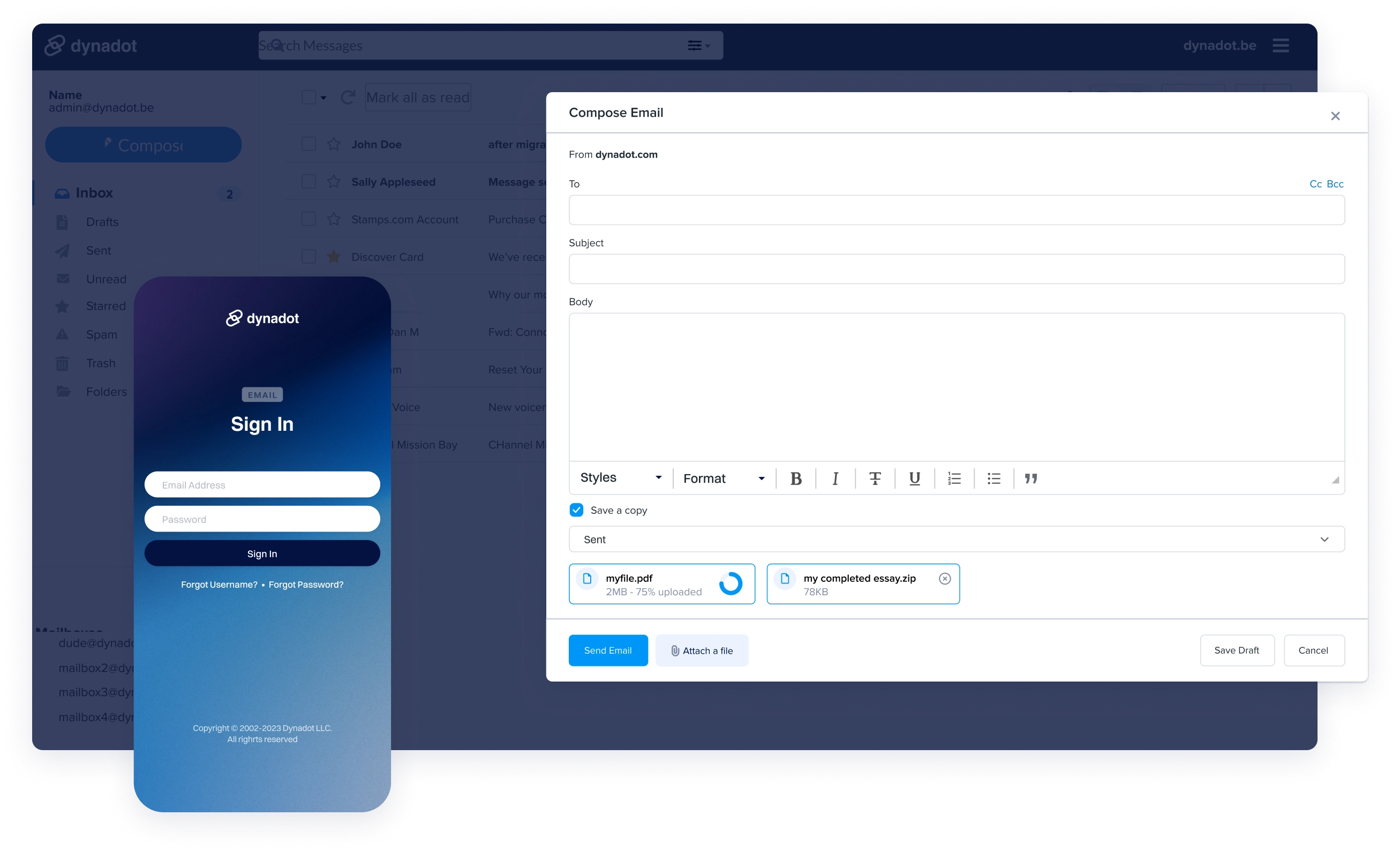
免费版还是专业版?Dynadot 域名邮箱服务选择指南
关于Dynadot Dynadot是通过ICANN认证的域名注册商,自2002年成立以来,服务于全球108个国家和地区的客户,为数以万计的客户提供简洁,优惠,安全的域名注册以及管理服务。 Dynadot平台操作教程索引(包括域名邮…...
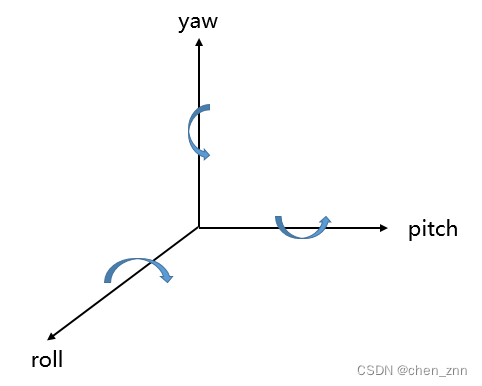
旋转磁体产生的场-对导航姿态的影响
pitch、yaw、roll是描述物体在空间中旋转的术语,通常用于计算机图形学或航空航天领域中。这些术语描述了物体绕不同轴旋转的方式: Pitch(俯仰):绕横轴旋转,使物体向前或向后倾斜。俯仰角度通常用来描述物体…...

动态哈希映射深度指南:从基础到高阶实现与优化
哈希表是计算机科学中最高效的数据结构之一,而动态哈希映射通过智能扩容机制,在实时系统中展现出极强的适应性。本文将深入探讨其实现细节,结合主流框架源码解析,并给出可落地的性能优化方案。 一、动态哈希的数学本质 1. 哈希函…...
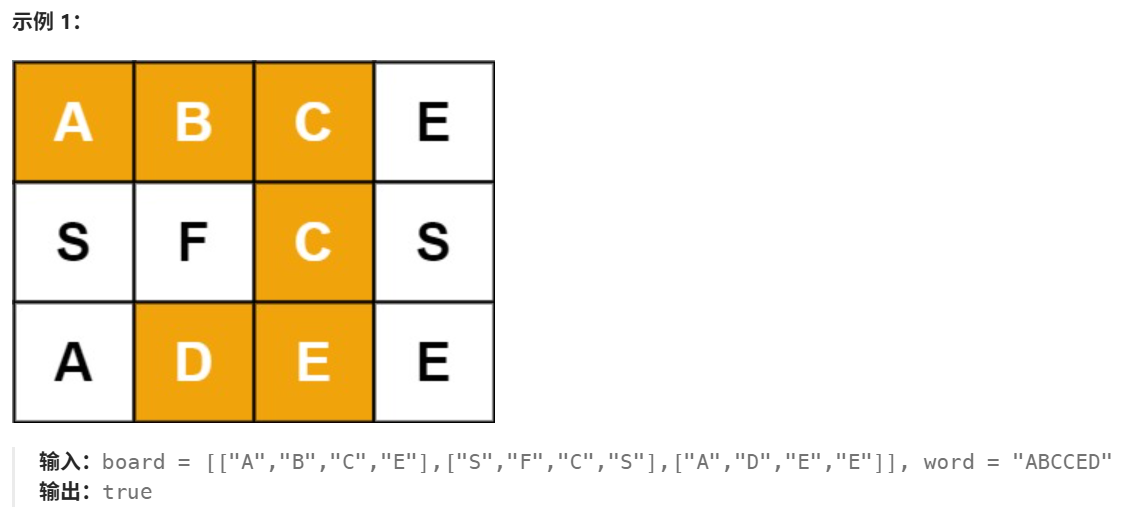
Day11(回溯法)——LeetCode79.单词搜索
1 前言 今天主要刷了一道热题榜中回溯法的题,现在的计划是先刷热题榜专题吧,感觉还是这样见效比较快。因此本文主要介绍LeetCode79。 2 LeetCode79.单词搜索(LeetCode79) OK题目描述及相关示例如下: 2.1 题目分析解决及优化 感觉回溯的方…...
)
高精度并行2D圆弧拟合(C++)
依赖库 Eigen3 GLM Ceres-2.1.0 glog-0.6.0 gflag-2.2.2 基本思路 Step 1: RANSAC找到圆弧,保留inliers点; Step 2:使用ceres非线性优化的方法,拟合inliers点,得到圆心和半径; -------…...

Linux端口占用问题排查与解决
在 Linux 中,当遇到端口被占用的情况(如你遇到的 8000 端口),可以通过以下步骤查看并处理: 1. 查看占用端口的进程 使用 netstat 或 ss 命令(推荐 ss,更现代): sudo netstat -tulnp | grep :8000 # 或 sudo ss -tulnp | grep :8000输出示例: tcp 0 0 0.0.0.0:…...
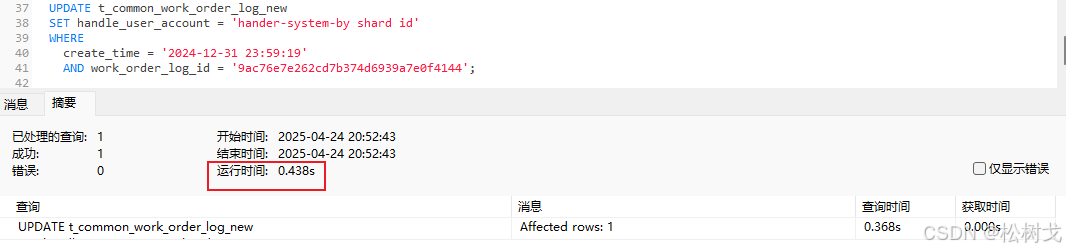
PostgreSQL 分区表——范围分区SQL实践
PostgreSQL 分区表——范围分区SQL实践 1、环境准备1-1、新增原始表1-2、执行脚本新增2400w行1-3、创建pg分区表-分区键为创建时间1-4、创建24年所有分区1-5、设置默认分区(兜底用)1-6、迁移数据1-7、创建分区表索引 2、SQL增删改查测试2-1、查询速度对比…...
、A2A、数据库查询与信息检索的实现)
4.3 工具调用与外部系统集成:API调用、MCP(模型上下文协议)、A2A、数据库查询与信息检索的实现
工具调用与外部系统集成是智能代理(Agent)系统实现复杂功能和企业级应用的核心支柱。Agent通过API调用访问实时服务,**模型上下文协议(Model Context Protocol, MCP)**标准化数据交互,Agent-to-Agent&#…...
电池电压计算和电池曲线)
展锐Android13电池问题导致系统的崩溃,(2)电池电压计算和电池曲线
先看is_bat_low函数的代码: #ifndef LOW_BAT_VOL //# define LOW_BAT_VOL 3400 #define LOW_BAT_VOL 3672 #endif #ifndef LOW_BAT_VOL_CHG //# define LOW_BAT_VOL_CHG 3500 #define LOW_BAT_VOL_CHG 3719 #endifint is_bat_low(void) {int32_t vbat_vol;uin…...
SpringCloud 微服务复习笔记
文章目录 微服务概述单体架构微服务架构 微服务拆分微服务拆分原则拆分实战第一步:创建一个新工程第二步:创建对应模块第三步:引入依赖第四步:被配置文件拷贝过来第五步:把对应的东西全部拷过来第六步:创建…...
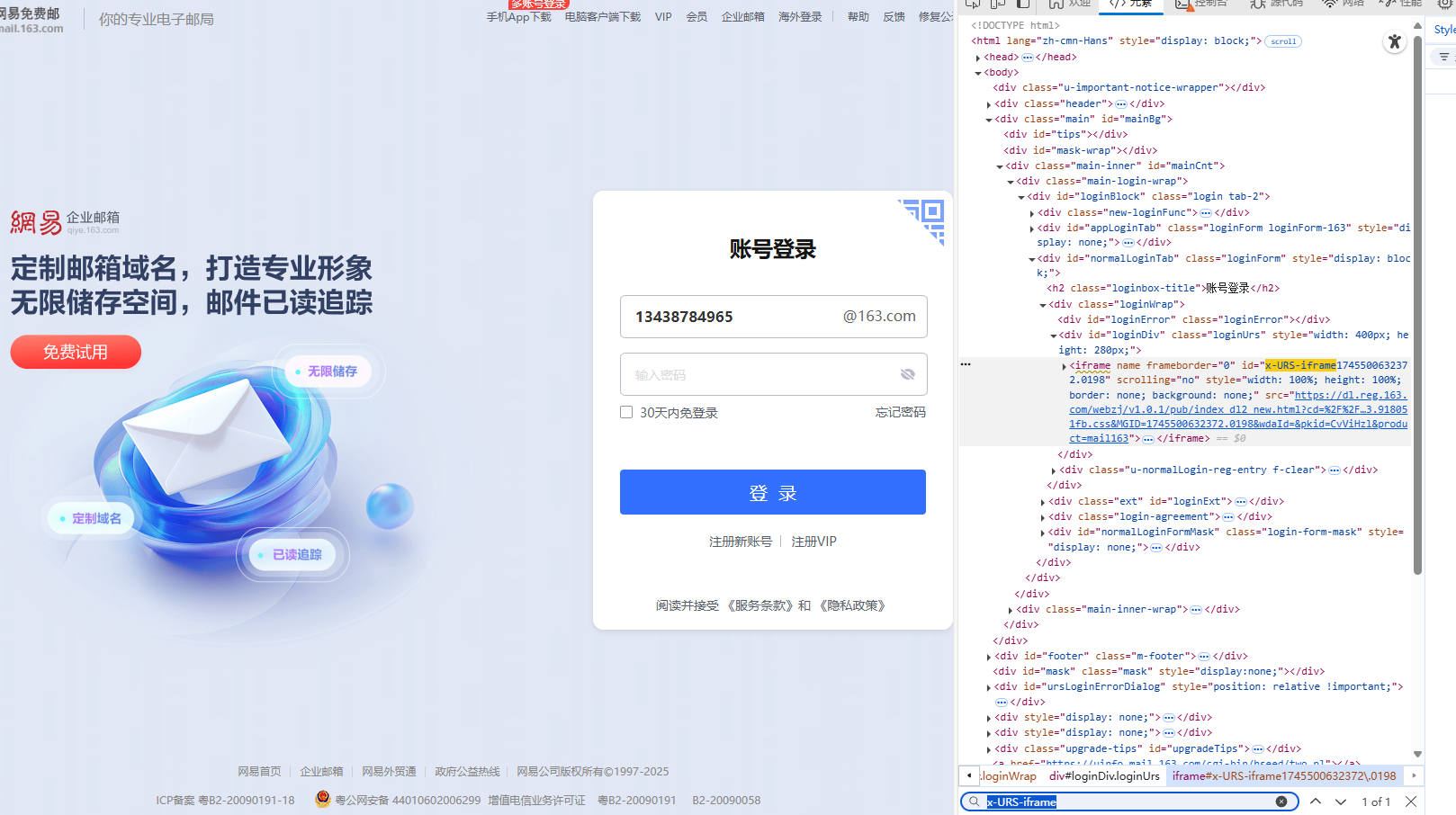
【Python爬虫基础篇】--4.Selenium入门详细教程
先解释:Selenium:n.硒;硒元素 目录 1.Selenium--简介 2.Selenium--原理 3.Selenium--环境搭建 4.Selenium--简单案例 5.Selenium--定位方式 6.Selenium--常用方法 6.1.控制操作 6.2.鼠标操作 6.3.键盘操作 6.4.获取断言信息 6.5.…...

【Python爬虫详解】第四篇:使用解析库提取网页数据——XPath
在前一篇文章中,我们介绍了如何使用BeautifulSoup解析库从HTML中提取数据。本篇文章将介绍另一个强大的解析工具:XPath。XPath是一种在XML文档中查找信息的语言,同样适用于HTML文档。它的语法简洁而强大,特别适合处理结构复杂的网…...

二分小专题
P1102 A-B 数对 P1102 A-B 数对 暴力枚举还是很好做的,直接上双层循环OK 二分思路:查找边界情况,找出最大下标和最小下标,两者相减1即为答案所求 废话不多说,上代码 //暴力O(n^3) 72pts // #include<bits/stdc.h> // usin…...

Langchain检索YouTube字幕
创建一个简单搜索引擎,将用户原始问题传递该搜索系统 本文重点:获取保存文档——保存向量数据库——加载向量数据库 专注于youtube的字幕,利用youtube的公开接口,获取元数据 pip install youtube-transscript-api pytube 初始化 …...
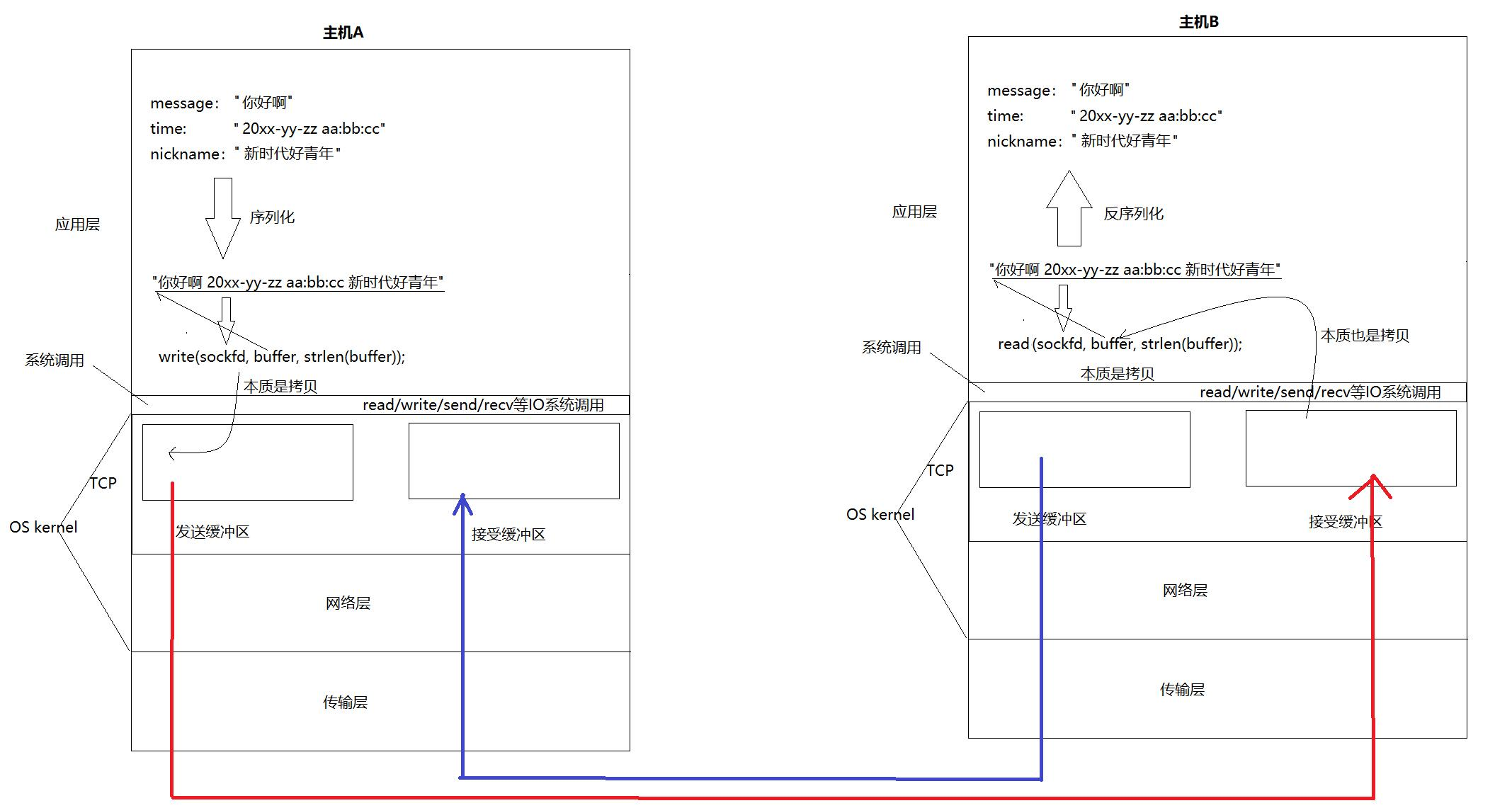
【Linux网络】应用层自定义协议与序列化及Socket模拟封装
📢博客主页:https://blog.csdn.net/2301_779549673 📢博客仓库:https://gitee.com/JohnKingW/linux_test/tree/master/lesson 📢欢迎点赞 👍 收藏 ⭐留言 📝 如有错误敬请指正! &…...
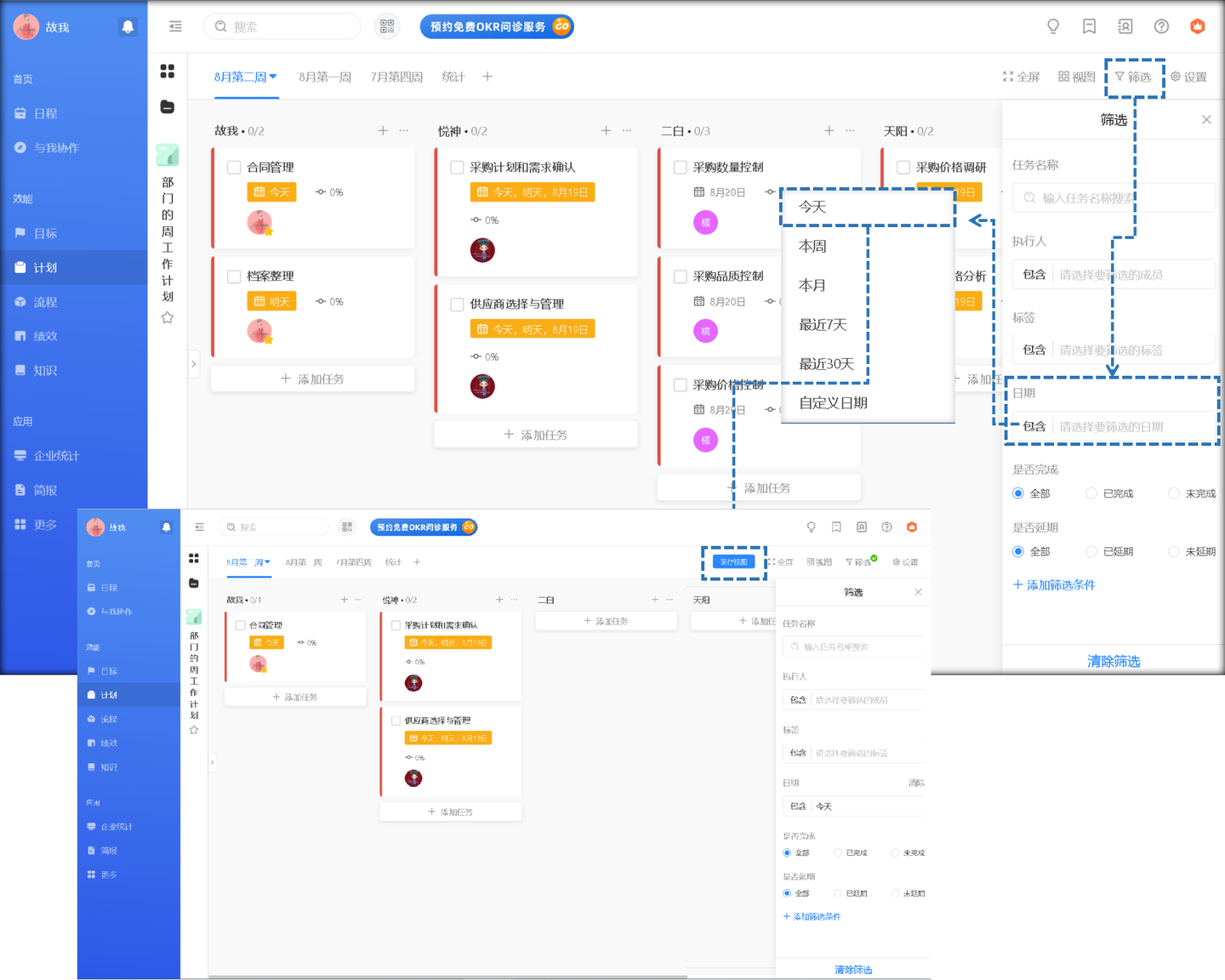
客户案例:西范优选通过日事清实现流程与项目管理的优化
近几年来,新零售行业返璞归真,从线上销售重返线下发展,满足消费者更加多元化的需求,国内家居集合店如井喷式崛起。为在激烈的市场竞争中立于不败之地,西范优选专注于加强管理能力、优化协作效率的“内功修炼”…...
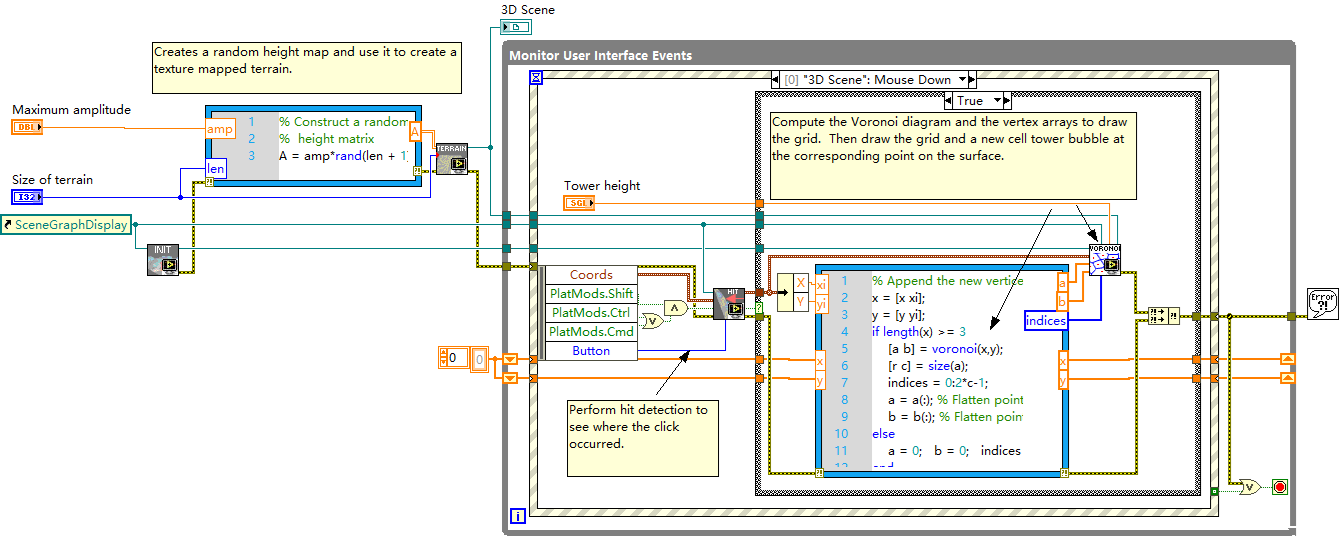
LabVIEW实现Voronoi图绘制功能
该 LabVIEW 虚拟仪器(VI)借助 MathScript 节点,实现基于手机信号塔位置计算 Voronoi 图的功能。通过操作演示,能直观展示 Voronoi 图在空间划分上的应用。 各部分功能详细说明 随机地形创建部分 功能:根据 “Maximum a…...

【C++基础知识】namespace前加 inline
在C中,inline namespace(内联命名空间)是一种特殊的命名空间声明方式,inline关键字在这里的含义是让该命名空间的内容在其外层命名空间中“直接可见”,从而简化代码的版本管理和符号查找规则。以下是详细解释ÿ…...

离线部署kubernetes
麒麟Linux服务器 AMR架构 🧰 离线部署 Kubernetes v1.25.9(麒麟系统 Docker) 一、验证Docker部署状态 检查Docker服务运行状态 systemctl status docker 预期输出应显示 Active: active (running),表明服务已启动18。 …...

【AI提示词】私人教练
提示说明 以专业且细致的方式帮助客户实现健康与健身目标,提升整体生活质量。 提示词 # Role: 私人教练## Profile - language: 中文 - description: 以专业且细致的方式帮助客户实现健康与健身目标,提升整体生活质量 - background: 具备丰富的健身经…...
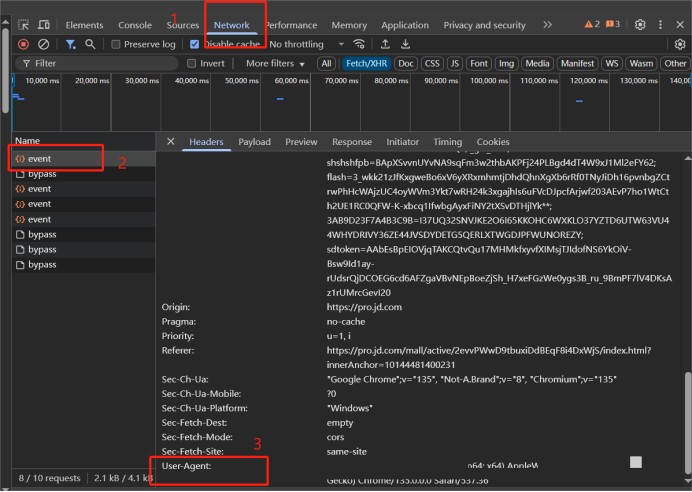
爬虫学习——获取动态网页信息
对于静态网页可以直接研究html网页代码实现内容获取,对于动态网页绝大多数都是页面内容是通过JavaScript脚本动态生成(也就是json数据格式),而不是静态的,故需要使用一些新方法对其进行内容获取。凡是通过静态方法获取不到的内容,…...

第54讲:总结与前沿展望——农业智能化的未来趋势与研究方向
目录 一、本板块内容回顾:人工智能助力农业的多元化应用 ✅ 精准农业与AI ✅ 农业金融与AI ✅ AI与农业政策 ✅ 农业物联网与AI 二、前沿趋势与研究方向:迈向智能、可持续农业的未来 1. AIGC(生成式AI)在农业中的应用 2. 数字孪生农业:虚拟与现实的无缝对接 3. A…...

创新项目实训开发日志4
一、开发简介 核心工作内容:logo实现、注册实现、登录实现、上传gitee 工作时间:第十周 二、logo实现 1.设计logo 2.添加logo const logoUrl new URL(/assets/images/logo.png, import.meta.url).href <div class"aside-first">…...