毫米波雷达点云SLAM系统
毫米波雷达点云SLAM系统
基于毫米波雷达点云数据的三维SLAM(同步定位与建图)系统,用于狭窄环境如室内和地下隧道的三维建图。
项目概述
本项目实现了一个完整的SLAM系统,利用毫米波雷达采集的点云数据进行实时定位和环境三维重建。系统特别针对狭窄空间环境进行了优化,适用于GPS信号不可用的室内和地下场景。
主要功能
- 毫米波雷达点云数据预处理与滤波
- 特征提取与匹配
- 点云配准与位姿估计
- 回环检测
- 全局优化
- 三维环境重建与可视化
技术特点
- 基于因子图优化的SLAM框架
- 针对稀疏点云的特征提取算法
- 改进的ICP(迭代最近点)算法用于点云配准
- 轻量级回环检测
- 分层式地图表示
依赖环境
- Python 3.8+(兼容至Python 3.11)
- 相关依赖库(见requirements.txt)
安装与设置
安装项目依赖:
# 创建虚拟环境
python3 -m venv venv_slam
source venv_slam/bin/activate # Linux/Mac
# 或者
venv_slam\\Scripts\\activate # Windows# 安装依赖
pip install -r requirements.txt
Open3D可视化依赖
Open3D需要特定的图形驱动支持以启用可视化功能。以下是不同系统的设置指南:
Linux (Ubuntu/Debian)
# 安装OpenGL库和X11支持
sudo apt-get update
sudo apt-get install -y libgl1-mesa-dev libgl1-mesa-glx xvfb
macOS
# 确保已安装XQuartz (X11)
brew install --cask xquartz
Windows
确保已安装最新的图形驱动程序,可从显卡制造商网站下载:
- NVIDIA: https://www.nvidia.com/Download/index.aspx
- AMD: https://www.amd.com/en/support
- Intel: https://www.intel.com/content/www/us/en/download-center/home.html
使用方法
-
运行测试:
python src/main.py --test可选参数:
--headless: 在无头模式下运行,不显示可视化界面,但会保存帧图像--config: 指定自定义配置文件路径--save_frames: 保存可视化帧为图像序列
-
处理实际数据:
python src/main.py --config config/default.yaml -
数据采集(使用实际雷达设备):
python src/data_collection.py --output data/input --device /dev/ttyUSB0 -
离线可视化:
python src/visualization/visualization.py --map_path results/map_TIMESTAMP.pcd --trajectory_path results/trajectory_TIMESTAMP.txt
无图形界面环境下的使用
在服务器或无图形环境下运行时,应使用以下命令:
# 使用headless模式并保存帧图像
python src/main.py --test --headless --save_frames
图像将保存在results/frames/目录下,可在离线环境中查看。
如果仍然遇到OpenGL相关错误,可以尝试:
-
在Linux系统上使用Xvfb创建虚拟显示:
xvfb-run -a python src/main.py --test --headless -
或者使用Mesa软件渲染:
LIBGL_ALWAYS_SOFTWARE=1 python src/main.py --test --headless -
通过SSH连接时,可能需要禁用X11转发:
ssh -X user@server export DISPLAY=:0 python src/main.py --test --headless --save_frames
离线渲染设置
系统支持通过配置文件调整离线渲染参数,在config/default.yaml中的offline_rendering部分:
offline_rendering:background_color: [0.1, 0.1, 0.1] # 背景颜色enabled: true # 是否启用离线渲染frame_rate: 30 # 帧率output_dir: frames # 输出目录名称quality: high # 渲染质量resolution: # 渲染分辨率width: 1280height: 720save_frames: true # 是否保存帧save_interval: 10 # 保存间隔(每n帧保存一次)camera: # 相机设置fov: 60.0 # 视场角zoom: 0.7 # 缩放position_offset: # 相机位置偏移back: 5.0 # 向后偏移up: 3.0 # 向上偏移
系统架构
该系统由以下核心模块组成:
- 预处理模块:对原始点云数据进行滤波、降采样和边缘提取
- 特征提取模块:使用ISS关键点检测代替Harris 3D提取稳定特征点
- 点云配准模块:实现帧间配准和位姿估计
- 回环检测模块:基于扫描上下文特征进行回环检测
- 图优化模块:基于g2o实现的位姿图优化
- 建图模块:构建和维护全局点云地图
- 可视化模块:实时显示SLAM过程和结果,支持离线渲染
配置文件说明
系统采用YAML格式的配置文件,可在config/default.yaml中调整各项参数:
- 数据路径配置
- 预处理参数
- 特征提取参数
- 点云配准参数
- 回环检测参数
- 优化参数
- 建图参数
- 可视化参数
- 离线渲染参数
结果输出
系统输出结果将保存在results/目录下:
- 点云地图(PCD格式)
- 轨迹文件(位姿序列)
- 可视化帧图像序列(如启用)
已知问题和解决方案
-
Harris 3D关键点检测问题:原始的Harris 3D关键点检测在较新版本的Open3D中不可用。已更新为使用ISS (Intrinsic Shape Signatures)关键点检测算法,提供了相同或更好的性能。如果ISS关键点检测失败,系统会自动回退到体素下采样方法。
-
可视化界面问题:在无图形环境(如远程服务器)下,可能无法显示交互式可视化窗口。已添加完善的离线渲染功能,通过
--headless --save_frames选项保存可视化结果为图像序列。系统会自动调整相机位置,跟随轨迹,并输出高质量的可视化结果。 -
Python导入问题:使用绝对导入路径解决了模块导入问题,确保在任何目录下运行都能正确导入依赖模块。
-
API兼容性问题:更新了代码以适应Open3D最新API,包括信息矩阵计算和全局优化选项的修改。
-
无头模式下的渲染崩溃:增强了错误处理机制,在遇到图形相关错误时能够自动降级到纯离线渲染模式,确保系统能够在任何环境下正常运行。
开发者说明
本系统在以下环境测试通过:
- Python 3.11.11
- Open3D 0.19.0
- NumPy 1.26.4
- macOS 13.5与Ubuntu 22.04
性能优化建议
如果处理大规模点云数据遇到性能问题,可考虑:
- 减小
voxel_size值增加下采样强度 - 调整
max_features限制每帧特征点数量 - 在配置文件中增加
max_points参数控制地图总点数 - 降低离线渲染的分辨率和保存频率以减少I/O开销
更新日志
2025-05-11 重大更新
本次更新主要解决了两个关键问题,提高了系统在无图形界面环境中的稳定性和兼容性:
-
Harris3D关键点检测替代方案实现
- 使用Open3D的ISS (Intrinsic Shape Signatures)关键点检测算法替代已弃用的Harris3D
- 添加了详细的配置选项,可通过YAML配置文件调整ISS参数
- 实现了多级回退机制,确保特征提取的稳定性:
- 优先使用Open3D内置的ISS实现
- 如果ISS检测失败,回退到体素下采样
- 增强了错误处理和日志记录
-
无头模式下的可视化改进
- 完全重构了可视化模块的离线渲染功能
- 实现了自动相机控制,根据轨迹动态调整视角
- 添加了可配置的帧保存间隔和图像分辨率
- 改进错误处理,即使在图形驱动有问题的服务器上也能正常运行
- 添加了详细的无头模式使用指南,包括多种环境下的配置方法
-
其他改进
- 更新主程序流程,确保结果文件的正确保存
- 改进了命令行参数解析
- 更新了配置文件结构,使其更加清晰和可扩展
- 添加了详细的文档和使用说明
这些改进使系统能够在各种环境下稳定运行,尤其是在无图形界面的服务器环境中,同时保持了高质量的可视化结果输出。
相关文章:

毫米波雷达点云SLAM系统
毫米波雷达点云SLAM系统 基于毫米波雷达点云数据的三维SLAM(同步定位与建图)系统,用于狭窄环境如室内和地下隧道的三维建图。 项目概述 本项目实现了一个完整的SLAM系统,利用毫米波雷达采集的点云数据进行实时定位和环境三维重建。系统特别针对狭窄空…...

5 从众效应
引言 有一个成语叫做三人成虎,意思是说,有三个人谎报市上有老虎,听者就信以为真。这种人在社会群体中,容易不加分析地接受大多数人认同的观点或行为的心理倾向,被称为从众效应。 从众效应(Bandwagon Effec…...

【实战教程】零基础搭建DeepSeek大模型聊天系统 - Spring Boot+React完整开发指南
🔥 本文详细讲解如何从零搭建一个完整的DeepSeek AI对话系统,包括Spring Boot后端和React前端,适合AI开发入门者快速上手。即使你是编程萌新,也能轻松搭建自己的AI助手! 📚博主匠心之作,强推专栏…...

用C语言实现的——一个支持完整增删查改功能的二叉排序树BST管理系统,通过控制台实现用户与数据结构的交互操作。
一、知识回顾 二叉排序树(Binary Search Tree,BST),又称二叉查找树或二叉搜索树,是一种特殊的二叉树数据结构。 基本性质: ①有序性 对于树中的每个节点,其左子树中所有节点的值都小于该节点的…...

排队论基础一:马尔可夫排队模型
排队论基础一:马尔可夫排队模型 介绍基本概念状态概率分布平均队列人数与平均排队人数平均停留时间与平均等待时间Little公式(Little Law)生灭过程生灭过程排队系统(马尔可夫排队模型)状态平衡方程介绍 最近写论文需要,学了一下排队过程模型。其实这些内容本科的时候我都…...
论文阅读笔记——ROBOGROUND: Robotic Manipulation with Grounded Vision-Language Priors
RoboGround 论文 一类中间表征是语言指令,但对于空间位置描述过于模糊(“把杯子放桌上”但不知道放桌上哪里);另一类是目标图像或点流,但是开销大;由此 GeoDEX 提出一种兼具二者的掩码。 相比于 GR-1&#…...
:架构风格总结)
系统架构设计(四):架构风格总结
黑板 概念 黑板体系架构是一种用于求解复杂问题的软件架构风格,尤其适合知识密集型、推理驱动、数据不确定性大的场景。 它模拟了人类专家协同解决问题的方式,通过一个共享的“黑板”协同多个模块(专家)逐步构建解决方案。 组…...
『 测试 』测试基础
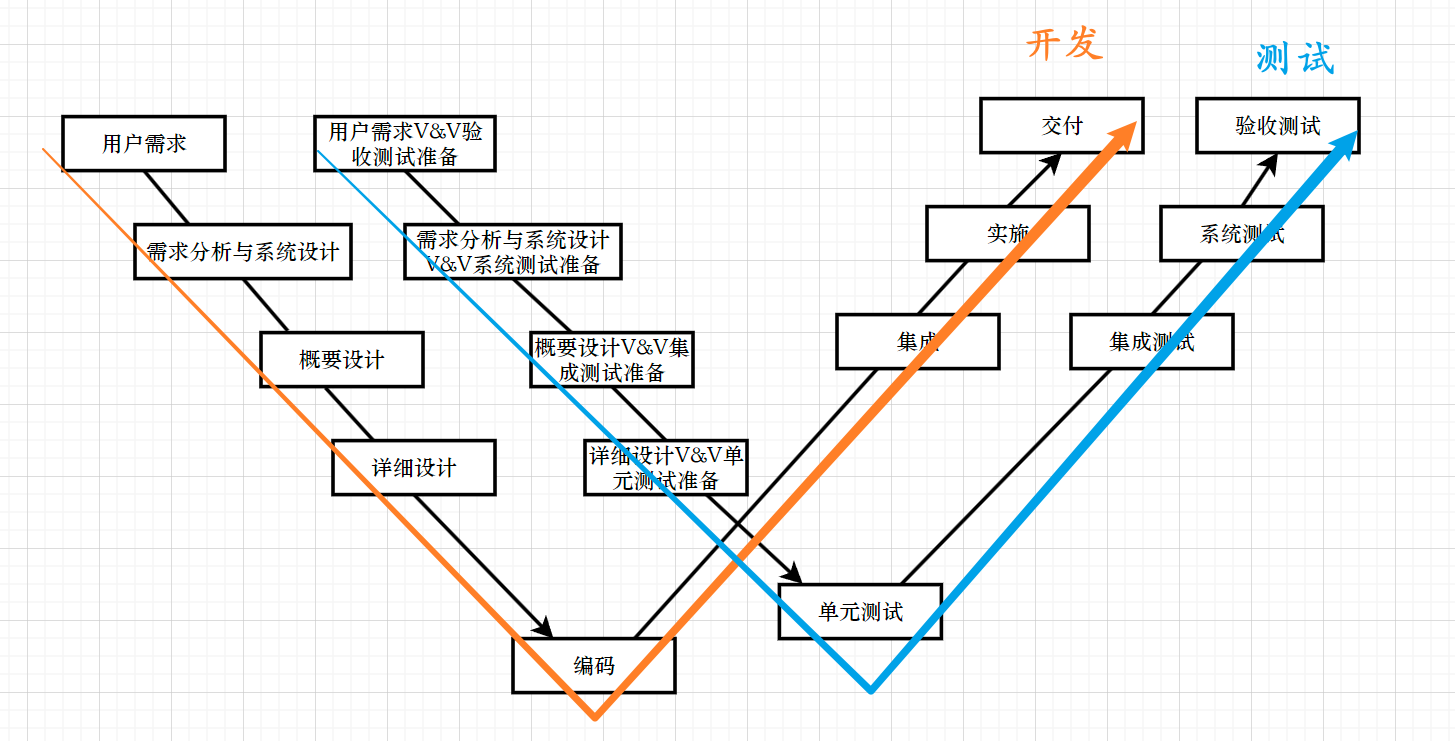
文章目录 1. 调试与测试的区别2. 开发过程中的需求3. 开发模型3.1 软件的生命周期3.2 瀑布模型3.2.1 瀑布模型的特点/缺点 3.3 螺旋模型3.3.1 螺旋模型的特点/缺点 3.4 增量模型与迭代模型3.5 敏捷模型3.5.1 Scrum模型3.5.2 敏捷模型中的测试 4 测试模型4.1 V模型4.2 W模型(双V…...
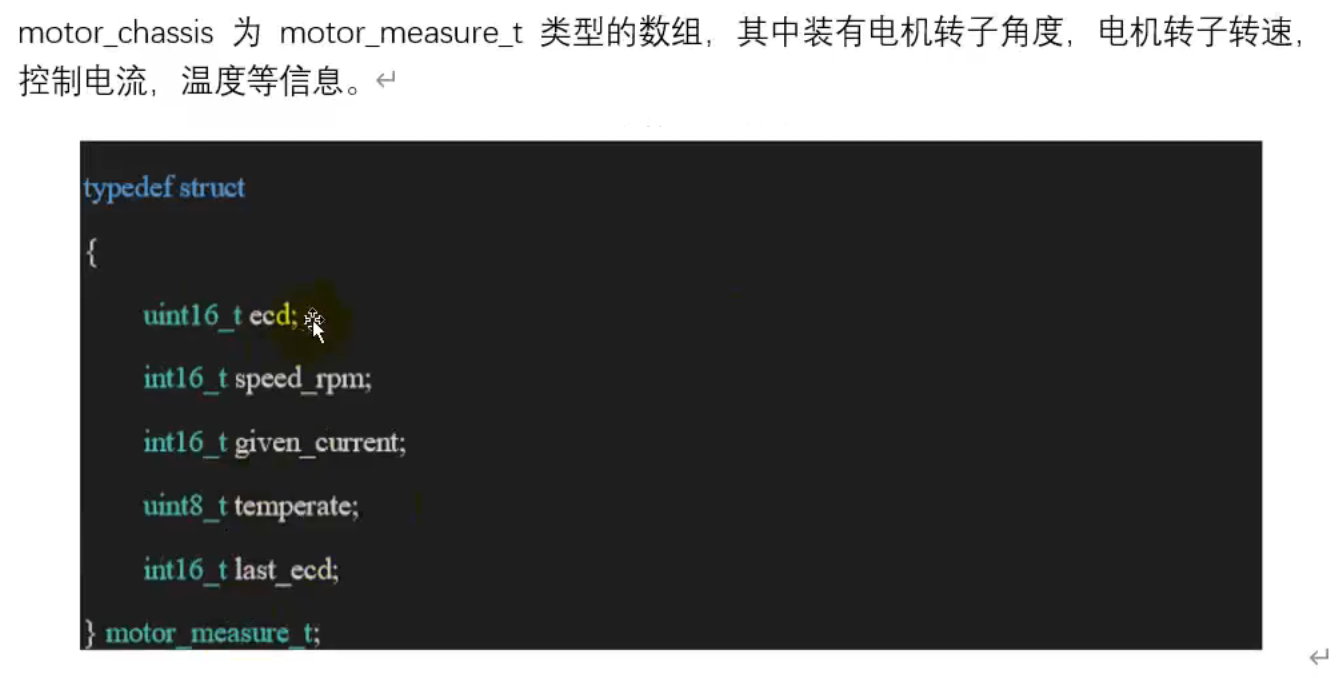
robomaster机甲大师--电调电机
文章目录 C620电调ID设置速率 电调发送报文电调接收报文cubemx程序初始化发送接收 C620电调 ID设置 速率 1Mbps 电调发送报文 发送的数据为控制电机的输出电流,需要将can数据帧的ID设置为0x200 电调接收报文 机械角度:电机的0到360度映射到0到几千转…...

汽车诊断简介
历史 20世纪80年代,由于美国西海岸严重的雾霾问题,CARB(加州空气资源委员会)通过了一项法律,要求对机动车辆进行车载监测诊断。这推动了OBD-I的引入,并在1990年代被OBD II取代。与此同时,欧洲也…...

少儿编程机构用的教务系统
在编程教育行业快速发展的今天,培训机构面临着学员管理复杂、课程体系专业性强、教学效果难以量化等独特挑战。爱耕云教务系统针对编程培训机构的特殊需求,提供了一套全方位的数字化解决方案,帮助机构实现高效运营和教学质量提升。 为什么编…...

优化理赔数据同步机制:从4小时延迟降至15分钟
优化理赔数据同步机制:从4小时延迟降至15分钟 1. 分析当前同步瓶颈 首先诊断当前同步延迟原因: -- 检查主从复制状态(在主库执行) SHOW MASTER STATUS; SHOW SLAVE HOSTS;-- 在从库执行检查复制延迟 SHOW SLAVE STATUS\G -- 关…...

面试中常问的设计模式及其简洁定义
🎯 一、面试中常问的设计模式及其简洁定义 模式名常被问到解释(简洁)单例模式✅ 高频保证一个类只有一个实例,并提供全局访问点。工厂模式✅ 高频创建对象的接口由子类决定,屏蔽了对象创建逻辑。抽象工厂模式✅提供多…...
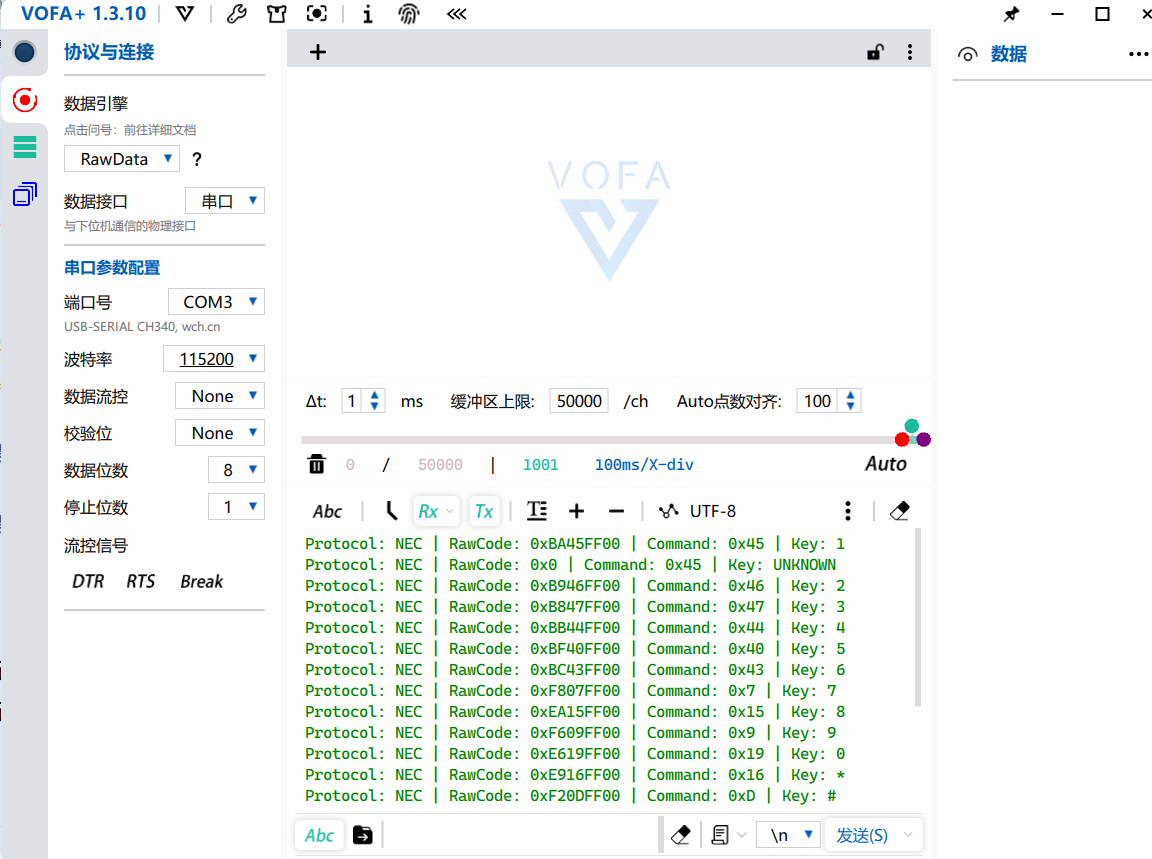
基于VSCode+PlatformIO环境的ESP8266的HX1838红外模块
以下是针对ESP8266开发板的红外遥控解码系统开发教程,基于VSCodePlatformIO环境编写 一、概述 本实验通过ESP8266开发板实现: 红外遥控信号解码自定义按键功能映射串口监控输出基础设备控制(LED) 硬件组成: NodeMC…...
Linux中的防火墙
什么是防火墙 windows防火墙的设置 linux防火墙设置命令 什么是防火墙? 防火墙是一种网络安全设备,它能够: 监控和过滤进出网络的流量 阻止不安全的连接 保护计算机和网络免受未授权访问 创建一个安全边界 简单来说,防火…...
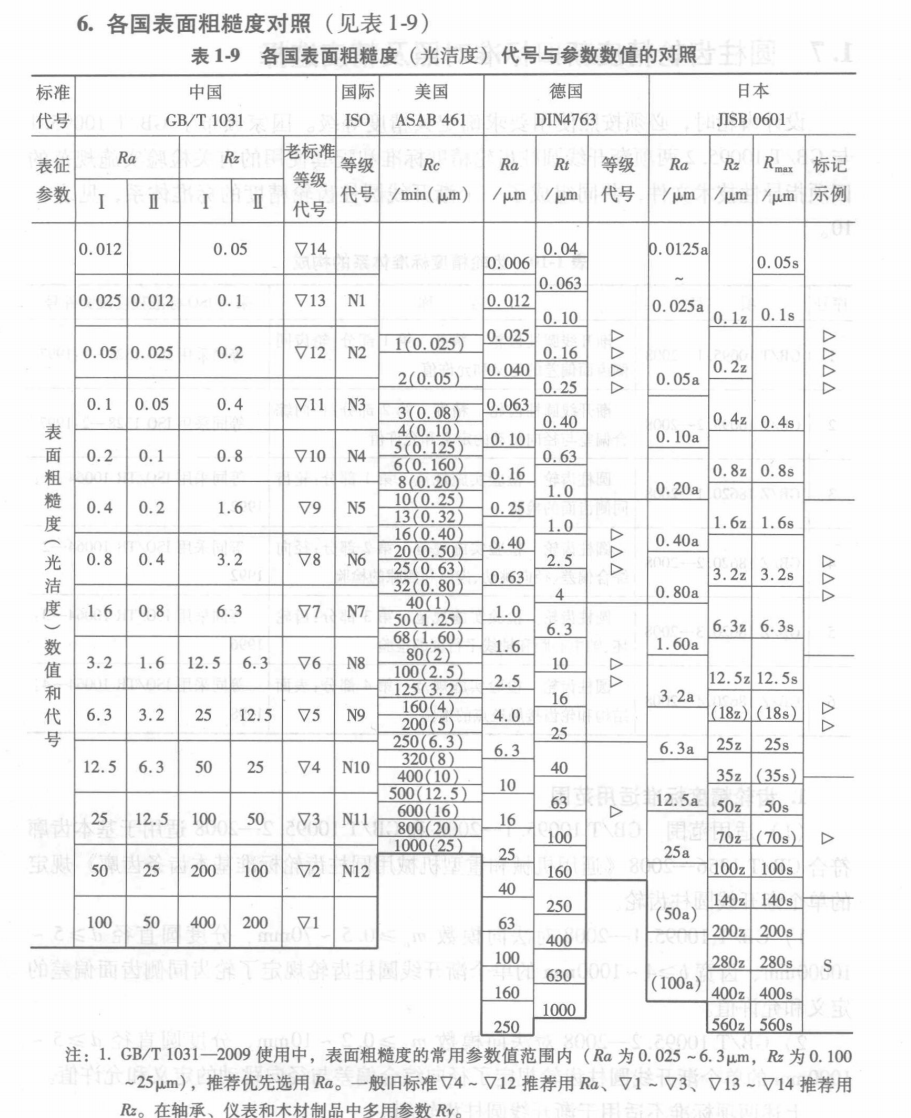
补补表面粗糙度的相关知识(一)
表面粗糙度,或简称粗糙度,是指表面不光滑的特性。这个在机械加工行业内可以说是绝绝的必备知识之一,但往往也是最容易被忽略的,因为往往天天接触的反而不怎么关心,或者没有真正的去认真学习掌握。对于像我一样…...
力扣刷题Day 46:搜索二维矩阵 II(240)
1.题目描述 2.思路 方法1:分别找到搜索矩阵的右、下边界,然后从[0][0]位置开始遍历这部分矩阵搜索目标值。 方法2:学习Krahets佬的思路,从搜索矩阵的左下角开始遍历,matrix[i][j] > target时消去第i行,…...

Kubernetes 集群部署应用
部署 Nginx 应用 命令行的方式 1. 创建 deployment 控制器的 pod # --imagenginx:这个会从 docker.io 中拉取,这个网站拉不下来 # kubectl create deployment mynginx --imagenginx# 使用国内镜像源拉取 kubectl create deployment mynginx --imaged…...

Spark 处理过程转换:算子与行动算子详解
在大数据处理领域,Apache Spark 凭借其强大的分布式计算能力脱颖而出,成为处理海量数据的利器。而 Spark 的核心处理过程,主要通过转换算子和行动算子来实现。本文将深入探讨 Spark 中的转换算子和行动算子,帮助读者更好地理解和应…...

Unity3D仿星露谷物语开发42之粒子系统
1、目标 使用例子系统,实现割草后草掉落的特效。 通过PoolManager获取特效预制体,通过VFXManager来触发特效。 2、配置例子特效 在Hierarchy -> PersistentScene下创建新物体命名为Reaping。 给该物体添加Particle System组件。 配置例子系统参数…...
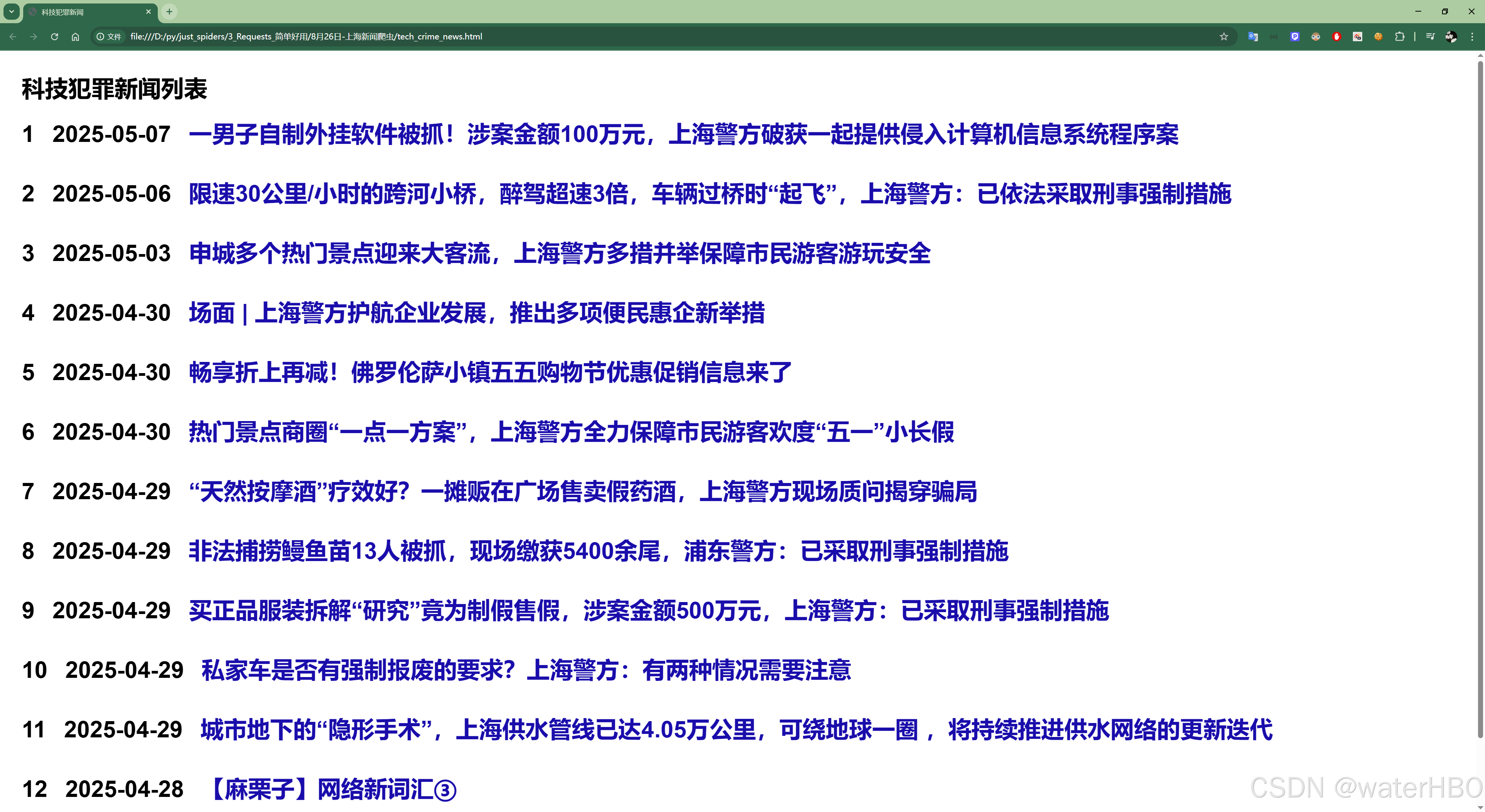
python 上海新闻爬虫, 东方网 + 澎湃新闻
1. 起因, 目的: 继续做新闻爬虫。我之前写过。此文先记录2个新闻来源。后面打算进行过滤,比如只选出某一个类型新闻。 2. 先看效果 过滤出某种类型的新闻,然后生成 html 页面,而且,自动打开这个页面。 比如科技犯罪…...

[Java实战]Spring Boot 整合 Freemarker (十一)
[Java实战]Spring Boot 整合 Freemarker (十一) 引言 Apache FreeMarker 作为一款高性能的模板引擎,凭借其简洁语法、卓越性能和灵活扩展性,在 Java Web 开发中占据重要地位。结合 Spring Boot 的自动化配置能力,开发者能快速构建动态页面、…...

LeetCode 高频题实战:如何优雅地序列化和反序列化字符串数组?
文章目录 摘要描述题解答案题解代码分析编码方法解码方法 示例测试及结果时间复杂度空间复杂度总结 摘要 在分布式系统中,数据的序列化与反序列化是常见的需求,尤其是在网络传输、数据存储等场景中。LeetCode 第 271 题“字符串的编码与解码”要求我们设…...

为什么拆分高低字节而不直接存入数组
您的代码片段是在将一个16位值()拆分为高字节和低字节:IR_RF_Signal.length temp_low IR_RF_Signal.length & 0xFF; temp_high IR_RF_Signal.length >> 8; 虽然我在 PX4-Autopilot 仓库中没有找到这段确切的代码,…...

python打卡day22@浙大疏锦行
复习日 仔细回顾一下之前21天的内容,没跟上进度的同学补一下进度。 作业: 自行学习参考如何使用kaggle平台,写下使用注意点,并对下述比赛提交代码 一、数据预处理 import pandas as pd import numpy as np import matplo…...

C#游戏开发中的注意事项
目录 一、性能优化:提升游戏运行效率 1. 避免不必要的循环和迭代 2. 减少字符串拼接 3. 利用Unity的生命周期函数 4. 使用对象池(Object Pooling) 二、内存管理:避免内存泄漏和资源浪费 1. 及时释放非托管资源 2. 避免空引用异常 3. 合理使用引用类型和值类型 4. …...
Spring Boot项目(Vue3+ElementPlus+Axios+MyBatisPlus+Spring Boot前后端分离)
下载地址: 前端:https://download.csdn.net/download/2401_83418369/90811402 后端:https://download.csdn.net/download/2401_83418369/90811405 一、前端vue部分的搭建 这里直接看另一期刊的搭建Vue前端工程部分 前端vue后端ssm项目_v…...
Spyglass:在batch/shell模式下运行目标的顶层是什么?
相关阅读 Spyglasshttps://blog.csdn.net/weixin_45791458/category_12828934.html?spm1001.2014.3001.5482 除了可以在图形用户界面(GUI)中运行目标外,使用Batch模式或Shell模式也可以运行目标,如下面的命令所示。 % spyglass -project test.prj -ba…...

没有Mac,我是怎么上传IPA到App Store的?
没有Mac,我是怎么上传IPA到App Store的? 最近赶一个小项目上线,写的是一个Flutter做的App。安卓版本一晚上搞定,iOS上架却差点把人整崩。 不是我技术菜,是实在太麻烦了。最关键的,是我这台Windows笔电根本…...

微服务架构中如何保证服务间通讯的安全
在微服务架构中,保证服务间通信的安全至关重要。服务间的通信通常是通过HTTP、gRPC、消息队列等方式实现的,而这些通信链路可能面临多种安全风险。为了应对这些风险,可以采取多种措施来保证通信安全。 常见的服务间通信风险 1.数据泄露:在服务间通信过程中,敏感数据可能会…...