如何在3ds max中创建可用于真人场景的巨型机器人:第 5 部分
推荐: NSDT场景编辑器助你快速搭建可二次开发的3D应用场景
1. After Effects 中的项目设置
步骤 1
打开“后效”。
打开后效果
步骤 2
我有真人版 我在After Effects中导入的素材。这是将 用作与机器人动画合成的背景素材。
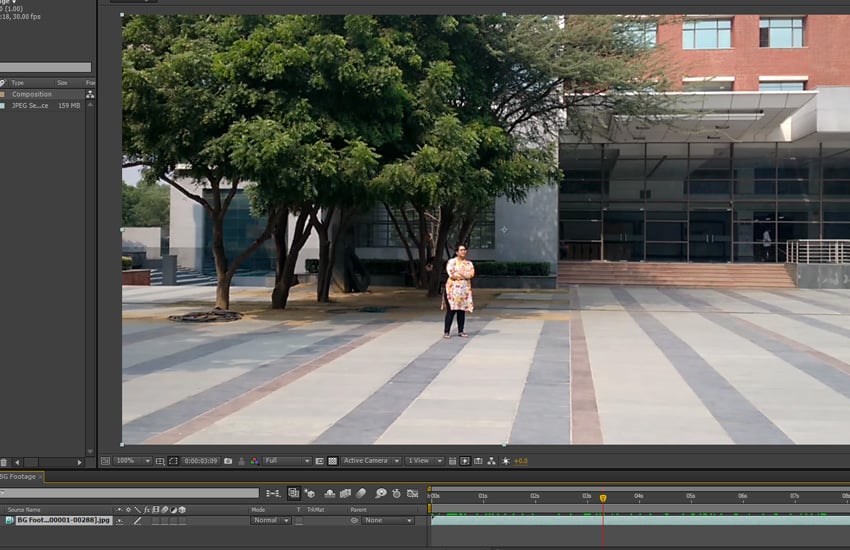
实景镜头
步骤 3
有背景 选定的素材图层,转到动画>跟踪摄像机。
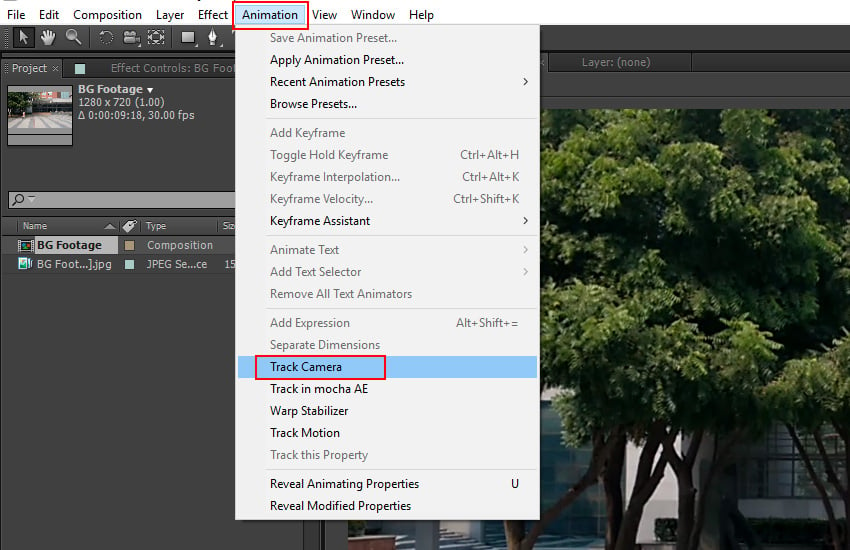
动画>跟踪摄像机
步骤 4
3D相机跟踪器 系统开始分析镜头以获得良好的跟踪点。它通常 需要几分钟。
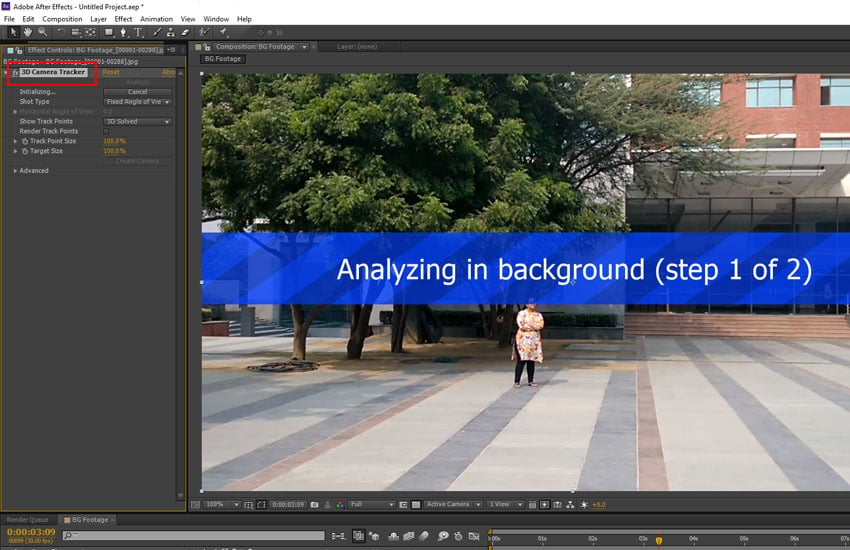
3D相机跟踪系统
步骤 5
当跟踪 完成后,您可以在场景中看到多个跟踪点。
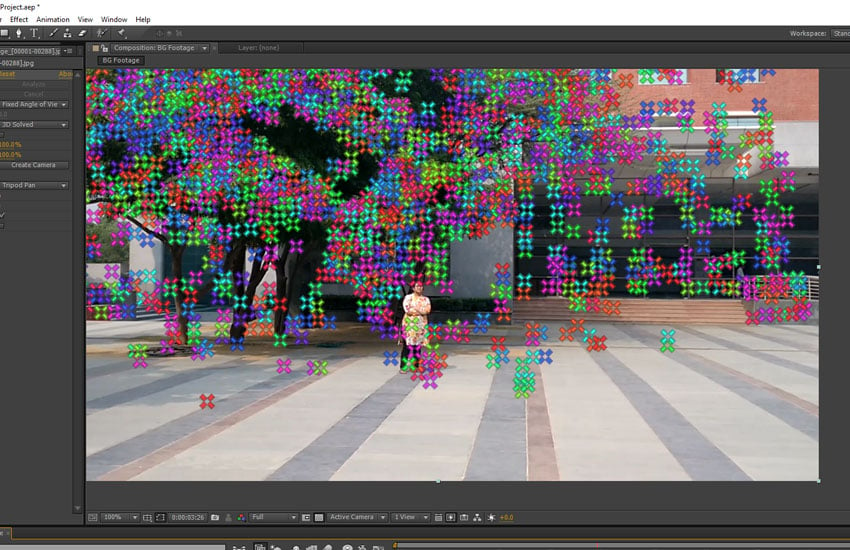
跟踪点
步骤 6
具有多个跟踪功能 选择的点,单击鼠标右键并选择创建空和相机,如下图所示。
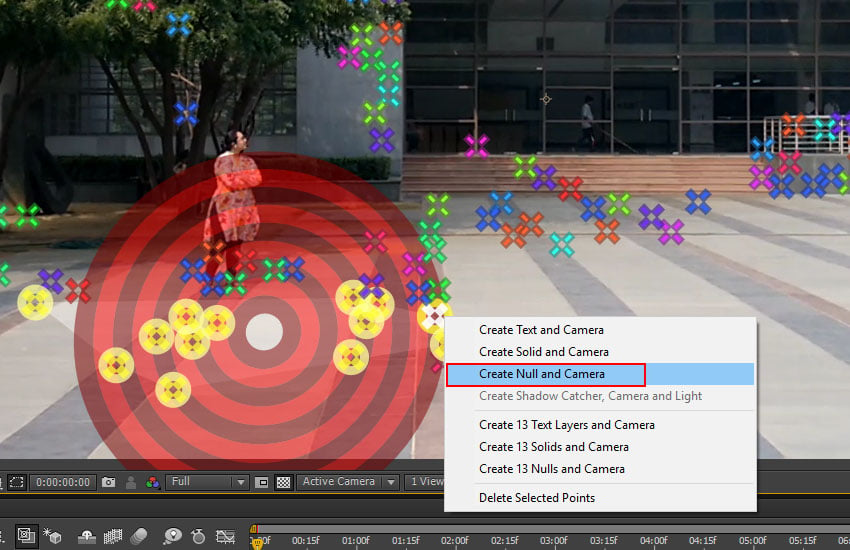
创建空和相机
步骤 7
你得到一个空对象 和时间轴中的 3D 相机。此空对象是占位符和棍子 与镜头并跟随相机。
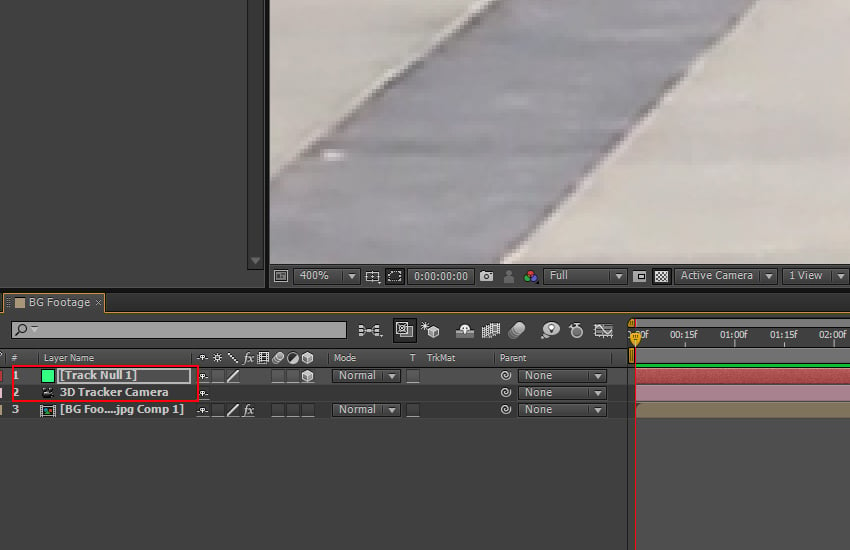
空对象和 3D 相机
步骤 8
你可以玩 空对象的旋转值,以保持其 Y 轴向上。
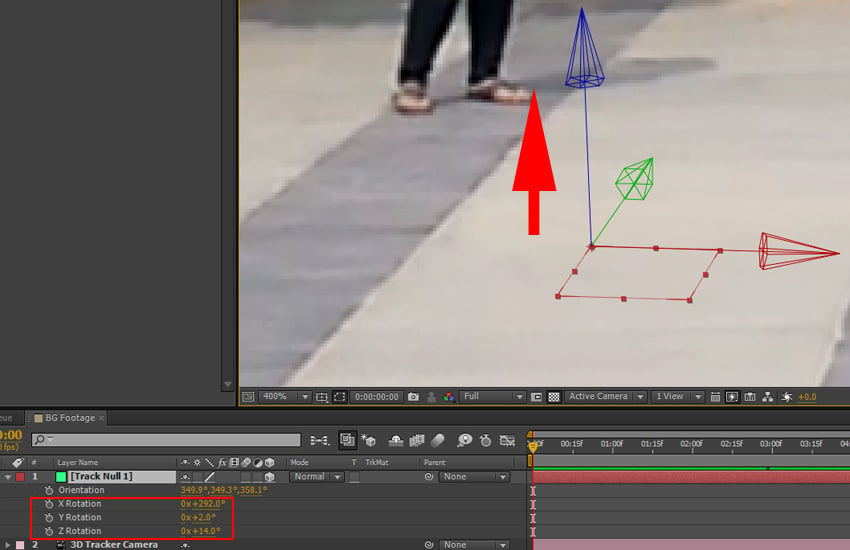
Rotation values
2. 出口 相机数据到 3ds Max
步骤 1
你可以找到一个免费的 在 www.aenhancer.com 中为 After Effects 编写 AE3D 脚本。下载这个 脚本并将其粘贴到After Effects的“脚本”文件夹中。 现在重新启动 After Effects。
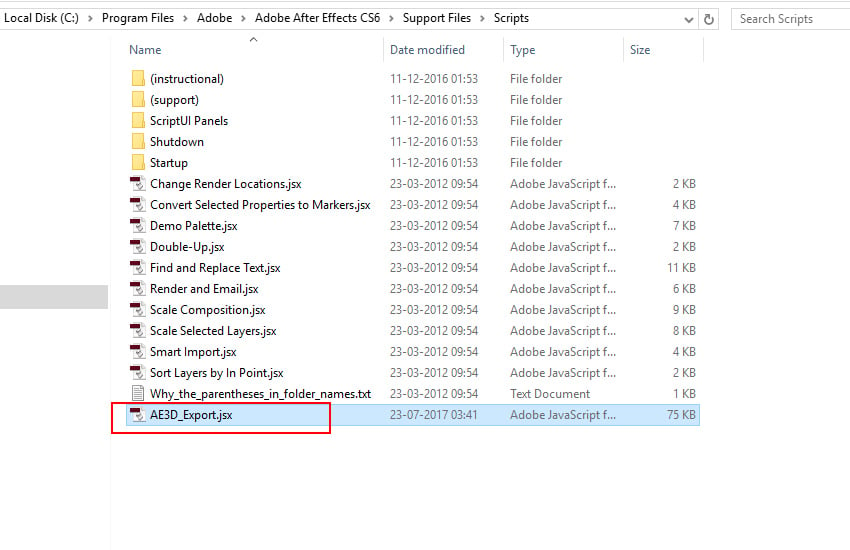
AE3D 脚本
步骤 2
再次打开相同的构图。使用空 选择对象和 3D 摄像机图层,转到文件>脚本> AE3D_Export.jsx.
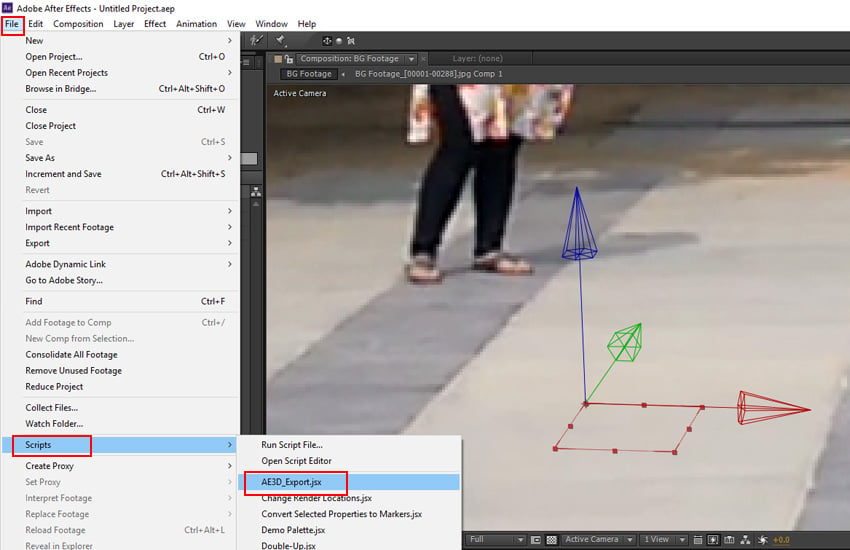
文件 > 脚本 > AE3D_Export.jsx
步骤 3
在 AE3D 窗口中,选择 3ds Max 选项,设置 相机 tracker.ms 的文件名,然后单击导出。它将3ds Max脚本文件保存在 桌面。
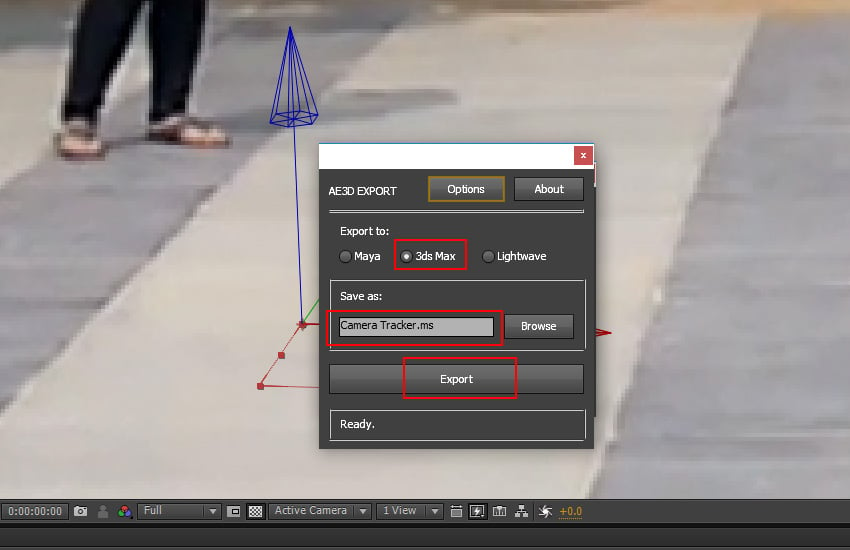
Export the script
3. 在 3ds Max 中创建场景
步骤 1
打开 3ds Max。
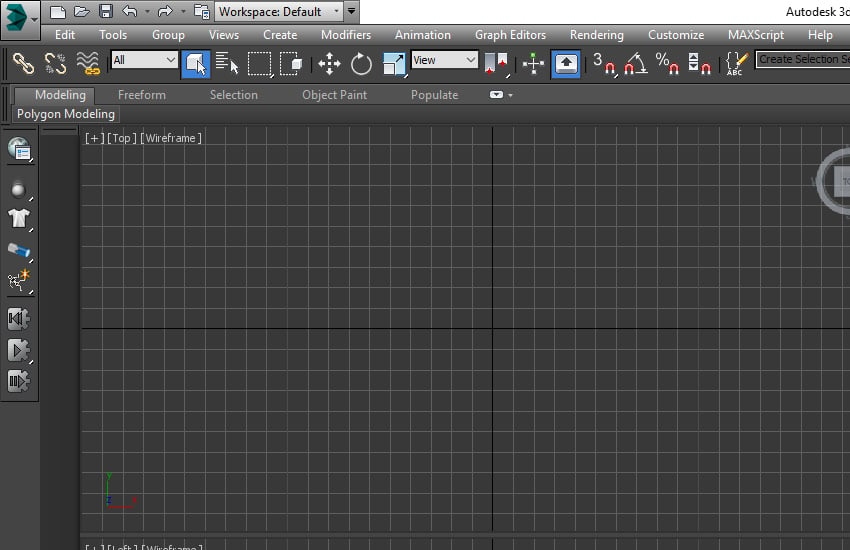
打开 3ds Max
步骤 2
转到 MAXScript > 运行脚本。
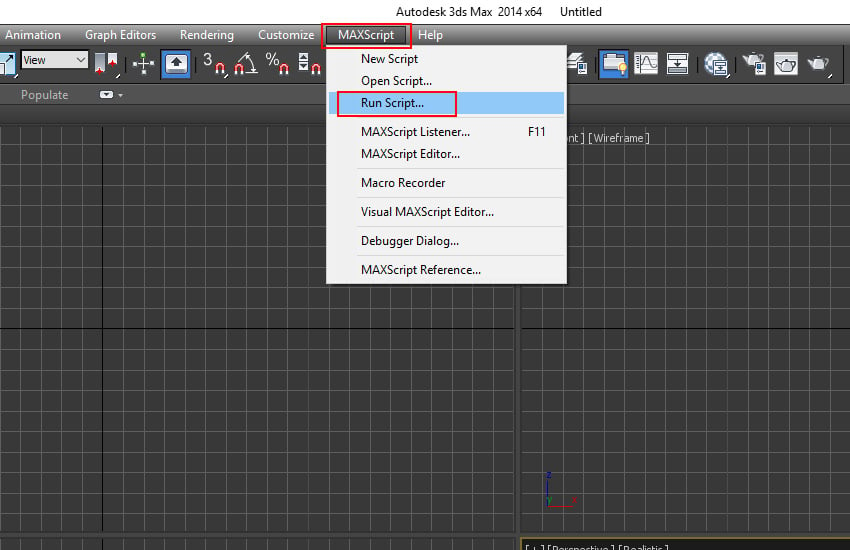
MAXScript > 运行脚本
步骤 3
浏览相机 导出 track.ms 脚本 来自后效。选择脚本,然后单击“打开”。
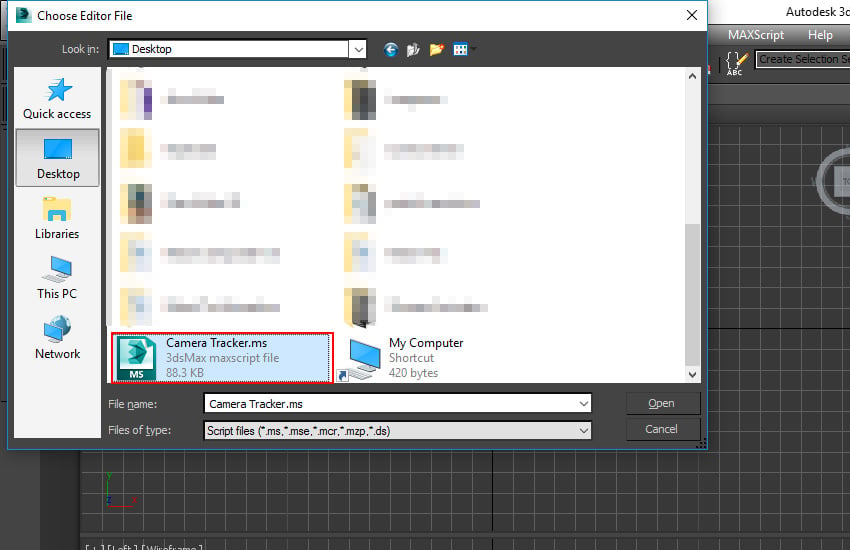
浏览相机 track.ms 脚本
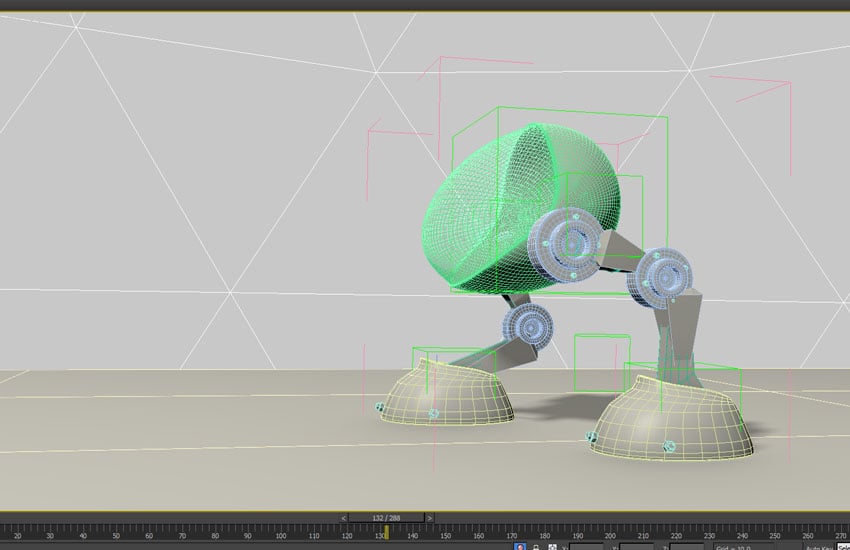
步骤 4
运行 脚本,你会得到一个3D相机和一个场景中的假人。
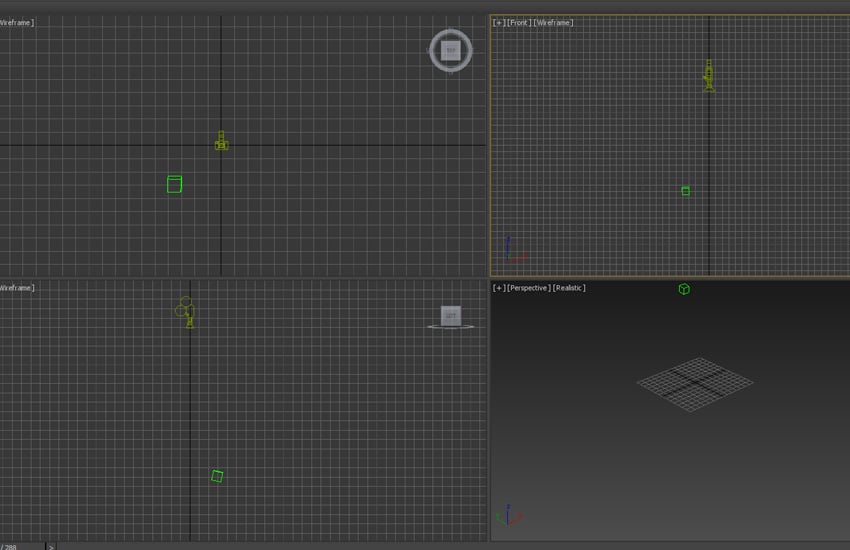
一个3D相机和一个假人
步骤 5
跳入视角 视图,然后按 C 键查看相机视图。
相机视图
步骤 6
现在相机是 颠倒。您需要更正相机的坐标。
校正相机坐标
步骤 7
将假人和相机一起选中后,转到组> 分组和创建组。
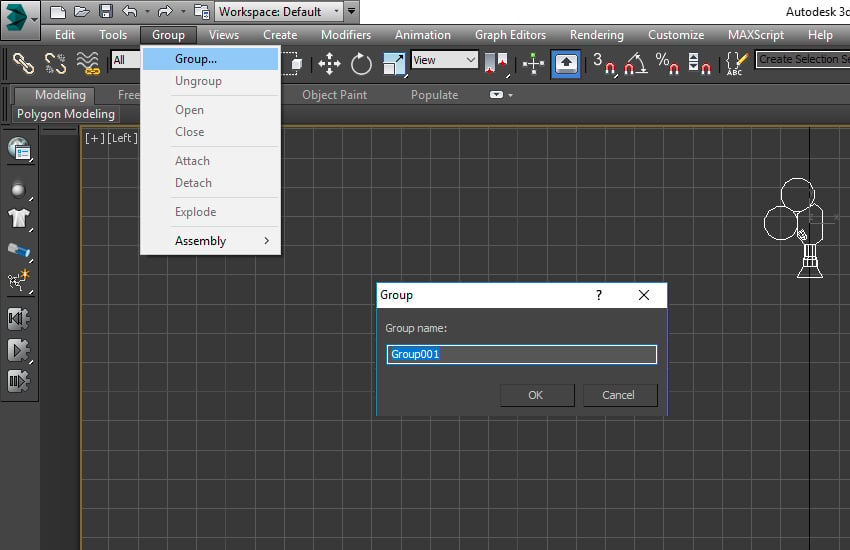
创建组
步骤 8
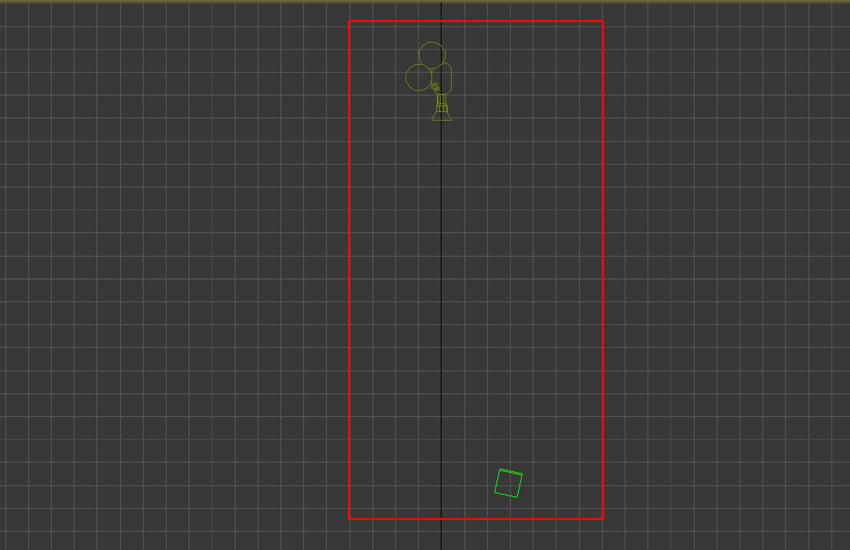
向左跳跃 视窗。选择旋转工具并将组旋转到右侧。 目标应该是将假人放在网格线上。
调整假人 a 再多一点,让它直截了当。

旋转组
步骤 9
跳入相机视图。 按 Alt-B 键打开视口配置窗口。转 上“使用文件”和“为背景设置动画”选项。单击文件。
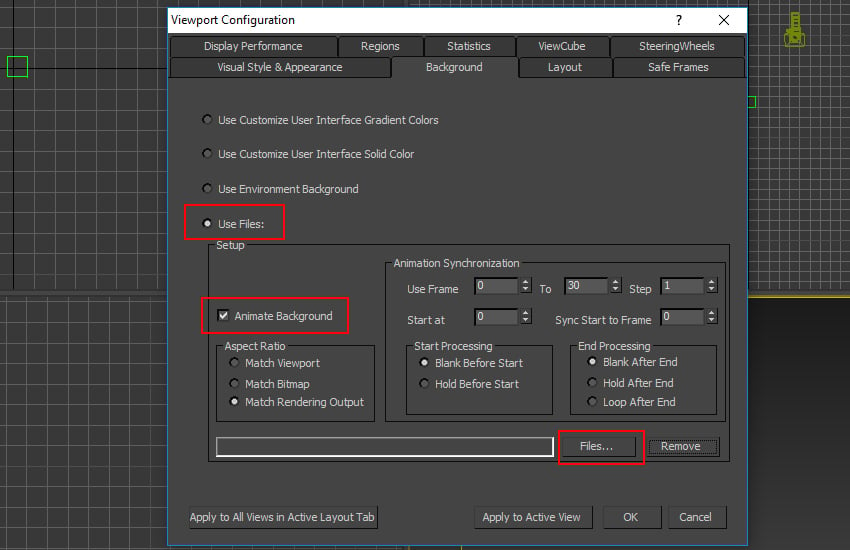
视口配置窗口
步骤 10
选择背景素材图像,然后单击打开。
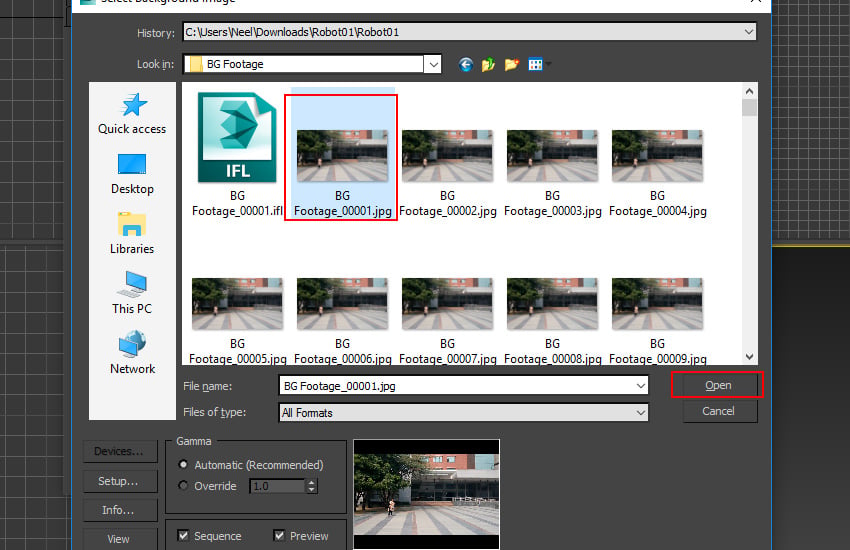
选择背景素材
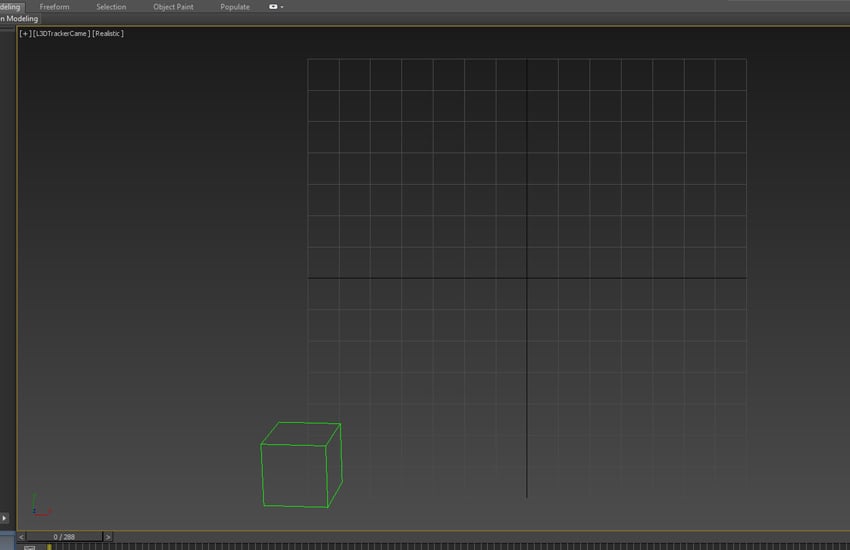
步骤 11
在 中打开“显示安全框架”选项 相机视图。或者,您可以按 Shift-F 键。
您可以 将任何 3D 虚拟对象放入场景中,并将其放在假人周围的网格上。我 在场景中放了一个盒子,你可以看到它跟随摄像机的移动。
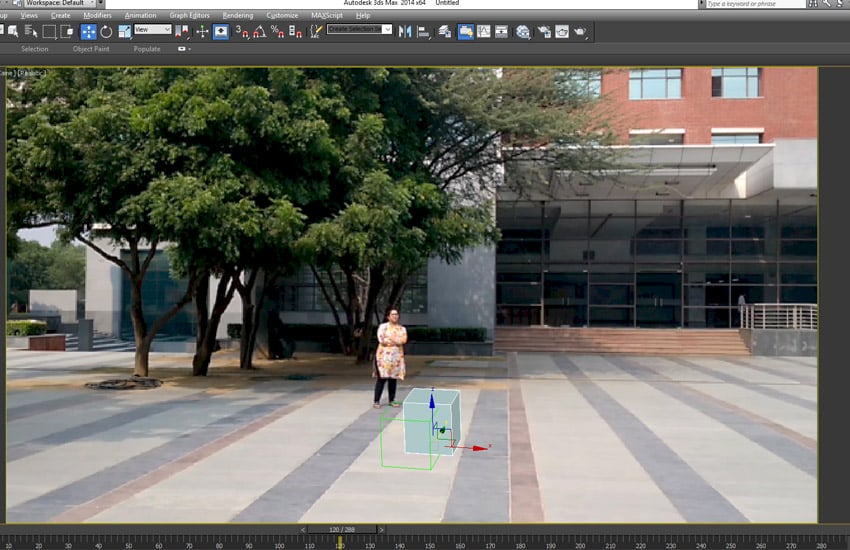
显示安全框架
4. 合成机器人动画
步骤 1
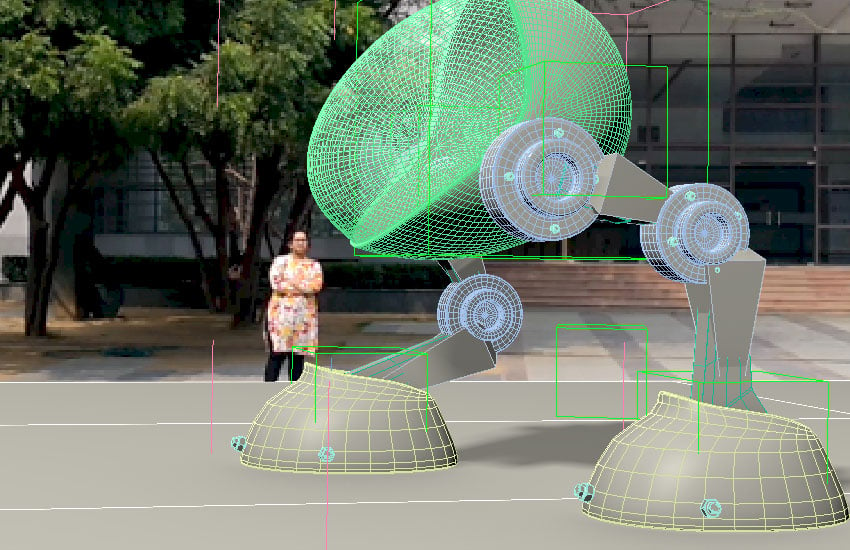
在本教程的最后一部分中,我向您展示了如何 为地板上的机器人制作动画。所以,现在你可以在场景中导入机器人 并在此处制作动画。或者,如果您已经为机器人制作了动画,则只需要 以合并此最大场景中的机器人动画文件。
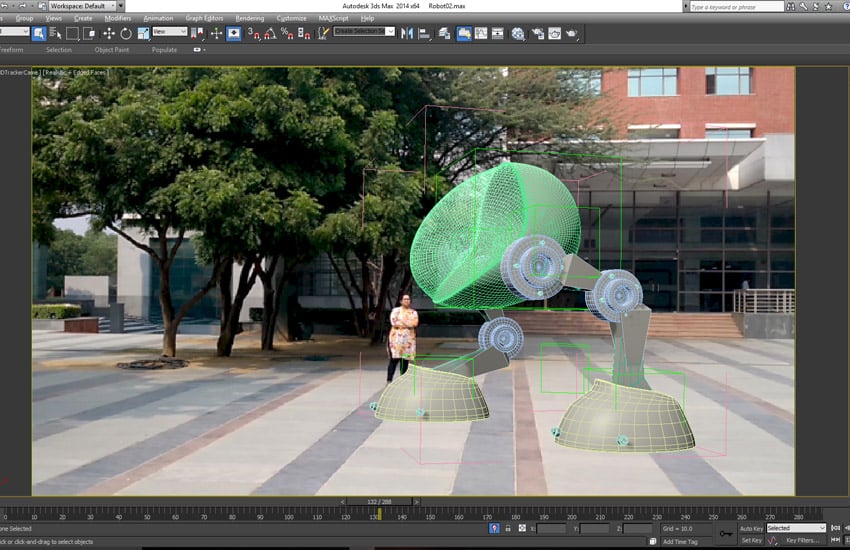
合并机器人动画
步骤 2
在机器人下面放一架飞机。应用哑光 影子在飞机上。
哑光阴影
步骤 3
创造 如下图所示的光源。
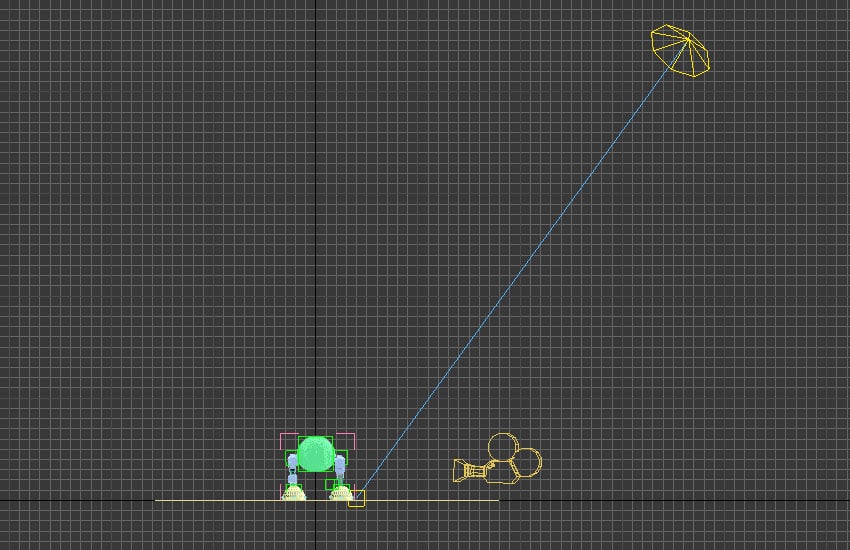
创建光源
步骤 4
使用球体创建圆顶并应用背景 镜头到它上面。
创建圆顶
步骤 5
渲染序列,您将获得漫反射 传递,如下图所示。
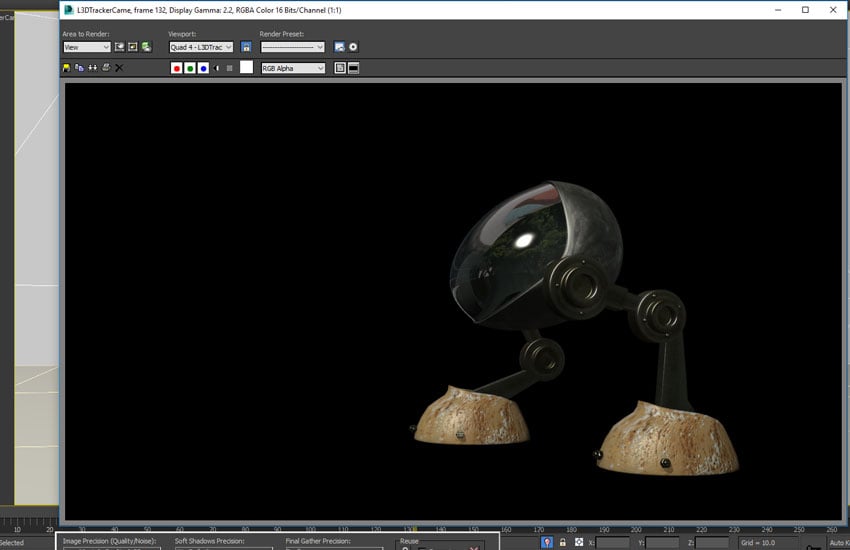
渲染序列
步骤 6
您还可以渲染环境光遮蔽通道 这是合成过程中接触阴影效果所必需的。

渲染环境光遮蔽通道
步骤 7
现在,您可以合成漫反射和环境 遮挡一起传递以获得最终的合成效果,如 下图。

合成漫反射通道和环境光遮蔽通道
原文链接:如何在3ds max中创建可用于真人场景的巨型机器人:第 5 部分 (mvrlink.com)
相关文章:
如何在3ds max中创建可用于真人场景的巨型机器人:第 5 部分
推荐: NSDT场景编辑器助你快速搭建可二次开发的3D应用场景 1. After Effects 中的项目设置 步骤 1 打开“后效”。 打开后效果 步骤 2 我有真人版 我在After Effects中导入的素材。这是将 用作与机器人动画合成的背景素材。 实景镜头 步骤 3 有背景 选定的素材…...
【MATLAB第61期】基于MATLAB的GMM高斯混合模型回归数据预测
【MATLAB第61期】基于MATLAB的GMM高斯混合模型回归数据预测 高斯混合模型GMM广泛应用于数据挖掘、模式识别、机器学习和统计分析。其中,它们的参数通常由最大似然和EM算法确定。关键思想是使用高斯混合模型对数据(包括输入和输出)的联合概率…...
Mnist分类与气温预测任务
目录 传统机器学习与深度学习的特征工程特征向量pytorch实现minist代码解析归一化损失函数计算图Mnist分类获取Mnist数据集,预处理,输出一张图像面向工具包编程使用TensorDataset和DataLoader来简化数据预处理计算验证集准确率 气温预测回归构建神经网络…...
Pytorch深度学习-----神经网络的卷积操作
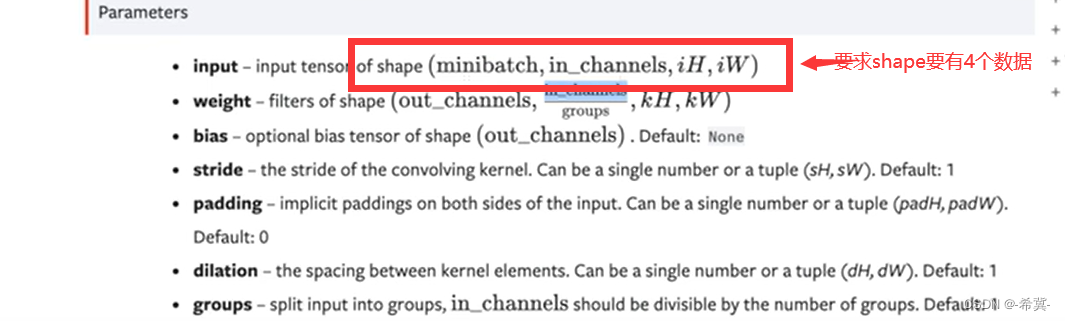
系列文章目录 PyTorch深度学习——Anaconda和PyTorch安装 Pytorch深度学习-----数据模块Dataset类 Pytorch深度学习------TensorBoard的使用 Pytorch深度学习------Torchvision中Transforms的使用(ToTensor,Normalize,Resize ,Co…...

微信小程序转抖音小程序的坑:The component <xxx> used in pages/xxx/xxx is undefined
微信小程序组件定义在根目录的 app.json 中了,在抖音小程序中出现找不到的情况。 在需要用到组件的 pages 目录中页面文件夹的 json "usingComponents": {} 大括号中添加页面使用的组件,即可使用......

Vue+element Ui的el-select同时获取value和label的方法总结
1.通过ref的形式(推荐) <template><div class"root"><el-selectref"optionRef"change"handleChange"v-model"value"placeholder"请选择"style"width: 250px"><el-optionv-for&q…...
乐划锁屏充分发挥强创新能力,打造内容业新生态
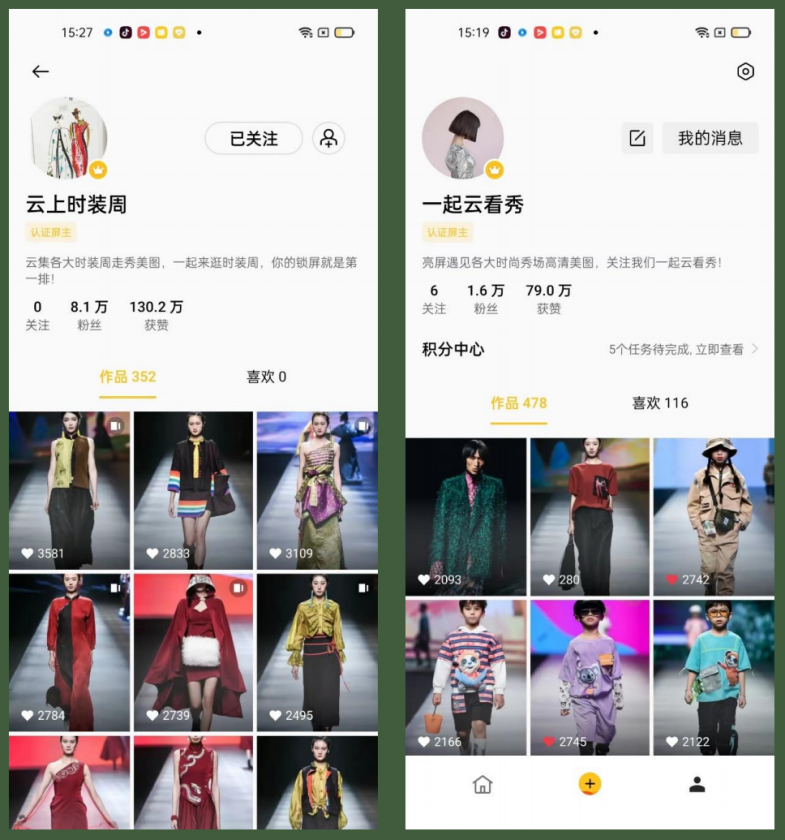
乐划锁屏作为新型内容媒体,在这一市场有着众多独特的优势,不仅能够通过多场景的联动给内容创作者带来了更多可能性,还促进了更多优质作品的诞生,为用户带来更加丰富多彩的锁屏使用体验。 作为OPPO系统原生的OS应用,乐划锁屏一直致力于打造为用户提供至美内容的内容平台,吸引了全…...

防御第三天
1.总结当堂NAT与双机热备原理,形成思维导图 2.完成课堂NAT与双机热备实验 fw1: <USG6000V1>sy [USG6000V1]int g0/0/0 [USG6000V1-GigabitEthernet0/0/0]ip add 192.168.18.2 24 [USG6000V1-GigabitEthernet0/0/0]service-manage all permit (地址无所谓&…...
用JavaScript和HTML实现一个精美的计算器
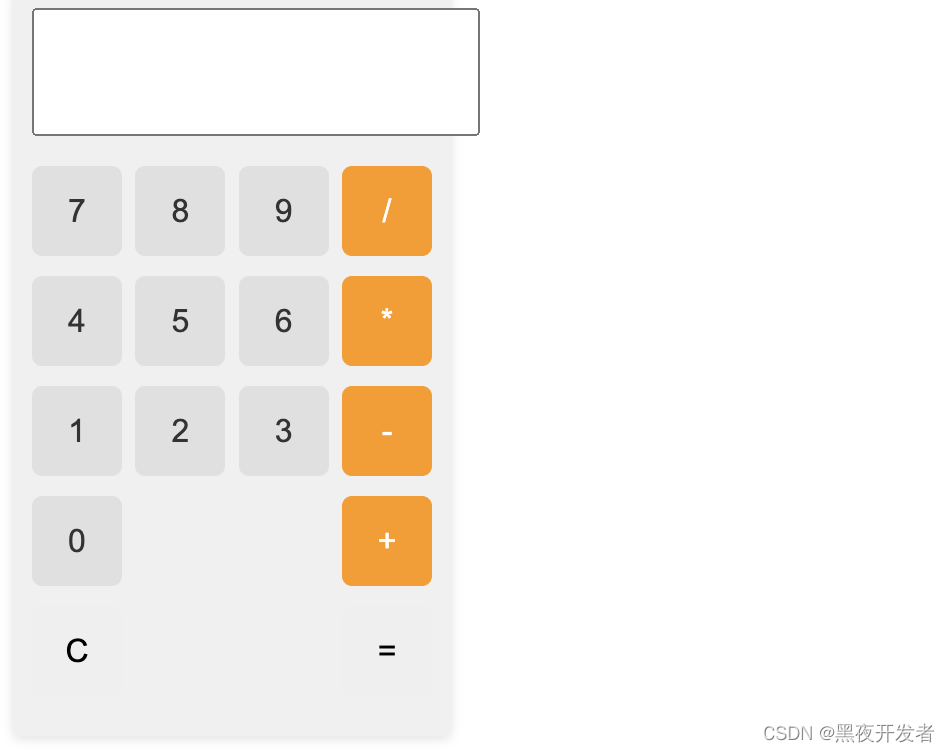
文章目录 一、前言二、技术栈三、功能实现3.1 引入样式3.2 编写显示页面3.2 美化计算器页面3.3 实现计算器逻辑 四、总结 一、前言 计算器是我们日常生活中经常使用的工具之一,可以帮助我们进行简单的数学运算。在本博文中,我将使用JavaScript编写一个漂…...
地址省市区解析函数)
基于postgresl的gaussDB(DWS)地址省市区解析函数
地址格式为: 省(自治区,直辖市)、市、区。 直辖市的地址格式为, 北京市北京市海淀区xxxxx。 若是北京市海淀区xxx,自己改改就可以了 采用的是笨办法,穷举。 涉及的两个主要内置函数。 1. instr( <start_positio…...

【Golang】Golang进阶系列教程--Go 语言 new 和 make 关键字的区别
文章目录 前言new源码使用 make源码使用 总结 前言 本篇文章来介绍一道非常常见的面试题,到底有多常见呢?可能很多面试的开场白就是由此开始的。那就是 new 和 make 这两个内置函数的区别。 在 Go 语言中,有两个比较雷同的内置函数…...

Day 9 C++ 内存分区模型
目录 内存四区 代码区 全局区 栈区 堆区 内存四区意义: 程序运行前后内存变化 程序运行前 代码区 全局区 程序运行后 栈区 堆区 new操作符 基本语法 创建 释放(delete) 内存四区 代码区 代码区(Code Segment&…...

STM32 CubeMX 定时器(普通模式和PWM模式)
STM32 CubeMX STM32 CubeMX 定时器(普通模式和PWM模式) STM32 CubeMXSTM32 CubeMX 普通模式一、STM32 CubeMX 设置二、代码部分STM32 CubeMX PWM模式一、STM32 CubeMX 设置二、代码部分总结 STM32 CubeMX 普通模式 一、STM32 CubeMX 设置 二、代码部分 …...

mysql清除主从复制关系
mysql清除主从复制关系 mysql主从复制中,需要将主从复制关系清除,需要取消其从库角色。这可通过执行RESET SLAVE ALL清除从库的同步复制信息、包括连接信息和二进制文件名、位置。从库上执行这个命令后,使用show slave status将不会有输出。reset slave是各版本Mysql都有的功…...
Spring Cloud Eureka 服务注册和服务发现超详细(附加--源码实现案例--及实现逻辑图)
文章目录 EurekaEureka组件可以实现哪些功能什么是CAP原则?服务注册代码实战搭建注册中心服务A搭建服务B搭建启动服务启动注册中心启动服务A启动服务B 结束语 Eureka 这篇文章先讲述一下Eureka的应用场景、代码实现案例,多个服务模块注册到Euraka中&…...

【docker】docker部署nginx
目录 一、步骤二、示例 一、步骤 1.搜索nginx镜像 2.拉取nginx镜像 3.创建容器 4.测试nginx 二、示例 1.搜索nginx镜像 docker search nginx2.拉取nginx镜像 docker pull nginx3.创建容器,设置端口映射、目录映射 # 在root目录下创建nginx目录用于存储nginx数据…...

苍穹外卖-day08
苍穹外卖-day08 本项目学自黑马程序员的《苍穹外卖》项目,是瑞吉外卖的Plus版本 功能更多,更加丰富。 结合资料,和自己对学习过程中的一些看法和问题解决情况上传课件笔记 视频:https://www.bilibili.com/video/BV1TP411v7v6/?sp…...
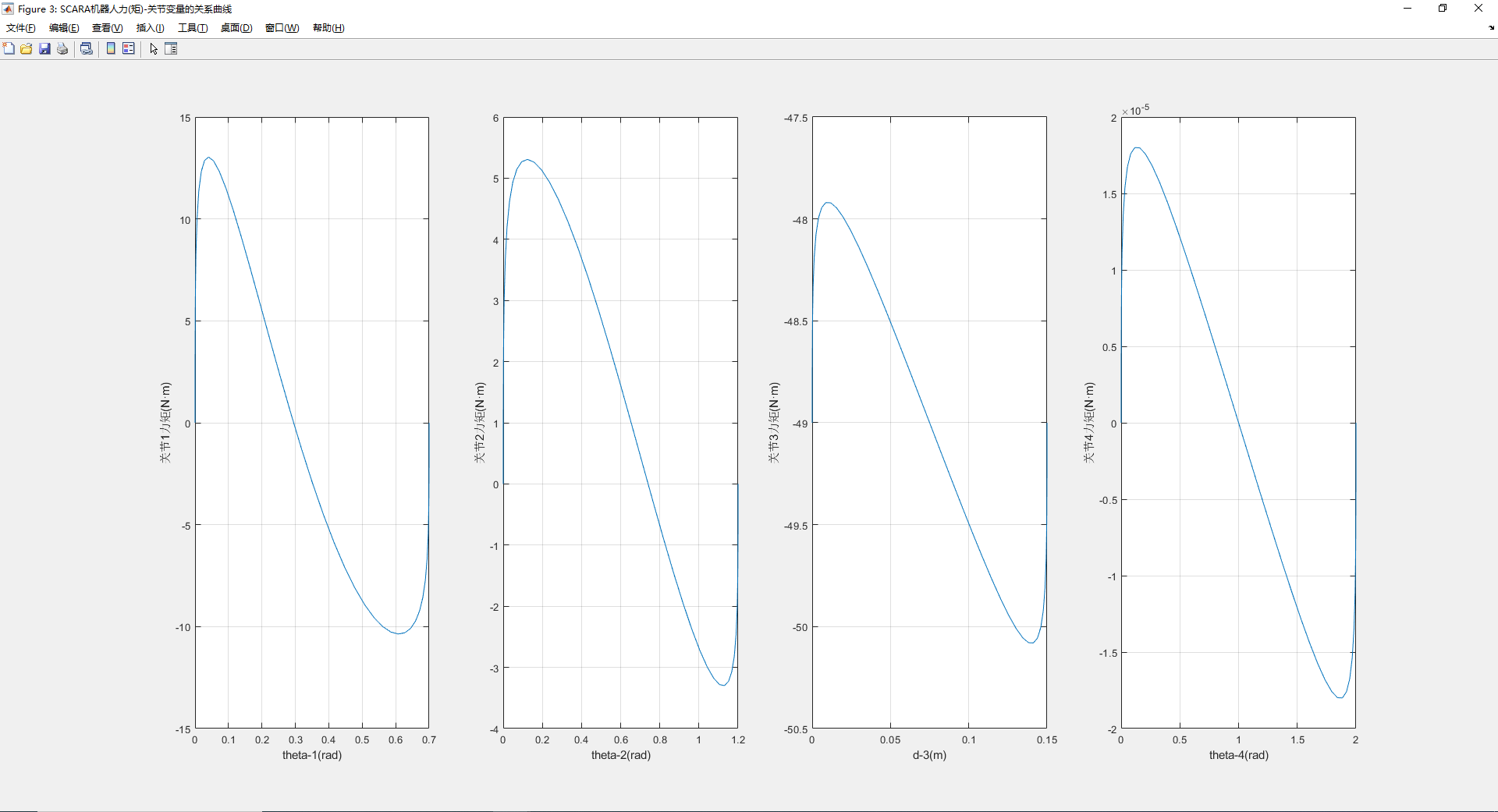
【matlab】机器人工具箱快速上手-动力学仿真(代码直接复制可用)
动力学代码,按需修改参数 各关节力矩-关节变量的关系曲线: %%%%%%%%SCARA机器人仿真模型 l[0.457 0.325]; L(1) Link(d,0,a,l(1),alpha,0,standard,qlim,[-130 130]*pi/180);%连杆1 L(2)Link(d,0,a,l(2),alpha,pi,standard,qlim,[-145 145]*pi/180);%连…...
MySQL高级篇第2章(MySQL的数据目录)
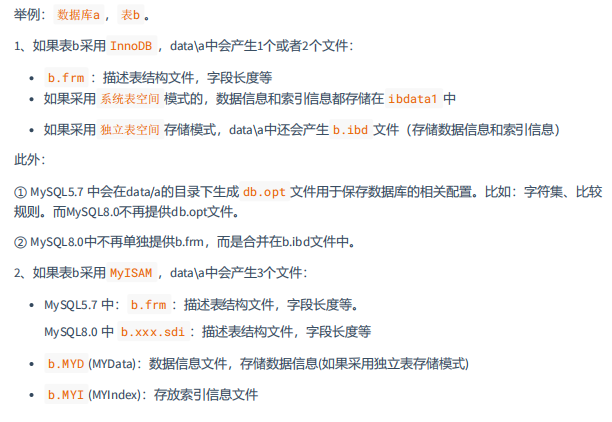
文章目录 1、MySQL8的主要目录结构1.1 数据库文件的存放路径1.2 相关命令目录1.3 配置文件目录 2、数据库和文件系统的关系2.1 查看默认数据库2.2 数据库在文件系统中的表示2.3 表在文件系统中的表示2.3.1 InnoDB存储引擎模式2.3.2 MyISAM存储引擎模式 2.4 小结 1、MySQL8的主要…...

【通过改变压缩视频的分辨率实现高效的视频语义分割】CVPR2022论文精度
Efficient Semantic Segmentation by Altering Resolutions for Compressed Videos Efficient Semantic Segmentation by Altering Resolutions for Compressed VideosBasic Information:论文简要 :背景信息:a. 理论背景:b. 技术路线: 结果:a. 详细的实验设置:b. 详细的实验结果…...

诚信标签工厂端解决方案 适配俄标 CRPT 体系一体化技术方案
俄罗斯诚实标签依托 CRPT 体系执行强制管控,各类出口货品必须完成 Data Matrix 编码采集、格式转换、多层包装数据绑定,数据合规后方可通关流通。美妆食品、日化建材、玩具五金等品类包装形态差异较大,人工采集方式普遍存在识别精度不足、批量…...

30岁裸辞后,我用两个月拿下AI应用认证,现在OFFER选择困难症犯了
30岁裸辞那天,我最怕的不是没收入,而是突然发现:过去积累的经验,正在被AI重新定价。以前会写方案、做表格、跟项目,算是职场硬通货;到了2026年,招聘JD里开始频繁出现AI工具应用、智能工作流、Pr…...
:揭秘那个让虚拟世界“有重量感“的阴影魔法)
环境光遮蔽(Ambient Occlusion):揭秘那个让虚拟世界“有重量感“的阴影魔法
一、一个让我"开窍"的老木匠故事 我有个朋友是传统家具的修复师,他给我讲过一个让我至今难忘的故事。他说他刚入行时跟着一位 70 多岁的老木匠师父学习——师父让他做的第一件事不是雕花、不是榫卯——而是"看阴影"——这个看似奇怪的训练改变了…...

Taotoken平台快速获取APIKey并开始你的第一个Python调用示例
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken平台快速获取APIKey并开始你的第一个Python调用示例 1. 准备工作:注册与登录 要开始使用Taotoken,…...

AI算法工程师如何进行模型部署?这2个工具+3个技巧,快速上线
对于软件测试从业者来说,模型部署并不是一个陌生的概念——随着AI功能逐渐渗透到各类应用软件中,测试工程师不仅需要验证模型输出的准确性,更需要理解部署流程对模型稳定性、响应速度和结果一致性的影响。很多测试同学会有这样的困惑…...

DLA功耗优化验证:tegrastats实战指南
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...

基于KS距离度量交通流分布偏移:提升DRL交通信号控制鲁棒性的工程实践
1. 项目概述与核心挑战在智能交通系统(ITS)领域,基于深度强化学习(DRL)的交通信号控制(Traffic Signal Control)正从研究走向实际部署。作为一名长期关注AI落地应用的从业者,我见过太…...

Claude Code用户告别封号与Token焦虑,无缝切换至Taotoken平台
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Claude Code用户告别封号与Token焦虑,无缝切换至Taotoken平台 对于依赖Claude Code进行编程辅助的开发者而言ÿ…...

开源三角洲机器人Delta-Robot One:从入门到精通的创客实践指南
1. 项目概述:一个为学习而生的开源三角洲机器人如果你对机器人感兴趣,但又觉得它高深莫测、无从下手,那么Delta-Robot One(我们亲切地称它为“One”)可能就是为你量身打造的入门项目。这不是一个遥不可及的工业设备&am…...

终极音乐解锁指南:3步让加密音乐在任何设备自由播放
终极音乐解锁指南:3步让加密音乐在任何设备自由播放 【免费下载链接】unlock-music 在浏览器中解锁加密的音乐文件。原仓库: 1. https://github.com/unlock-music/unlock-music ;2. https://git.unlock-music.dev/um/web 项目地址: https:/…...