基于ARM+FPGA的驱控一体机器人控制器设计

相关文章:
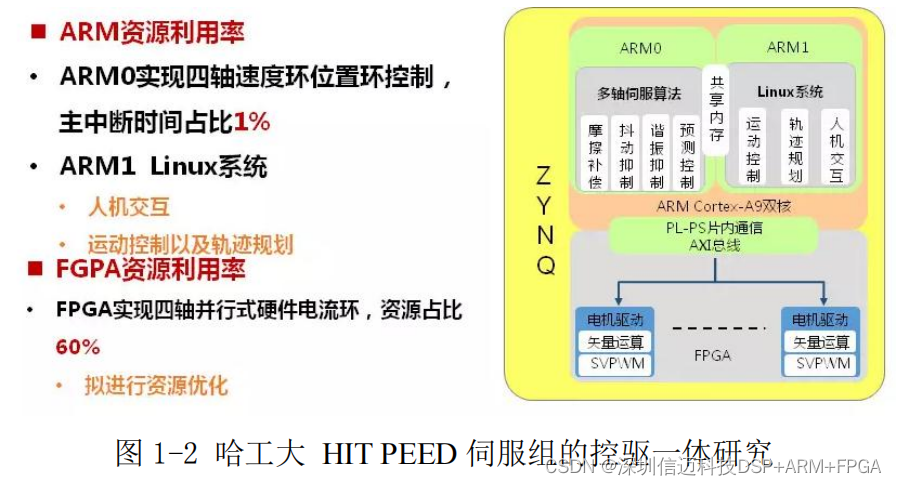
基于ARM+FPGA的驱控一体机器人控制器设计
目前市场上工业机器人,数控机床等多轴运动控制系统普遍采用运动控制器加 伺服驱动器的分布式控制方式。在这种控制方式中,控制器一方面完成人机交互,另 一方面进行 NC 代码的解释执行,插补运算,继而将计算出来的位…...
docker 安装 字体文件
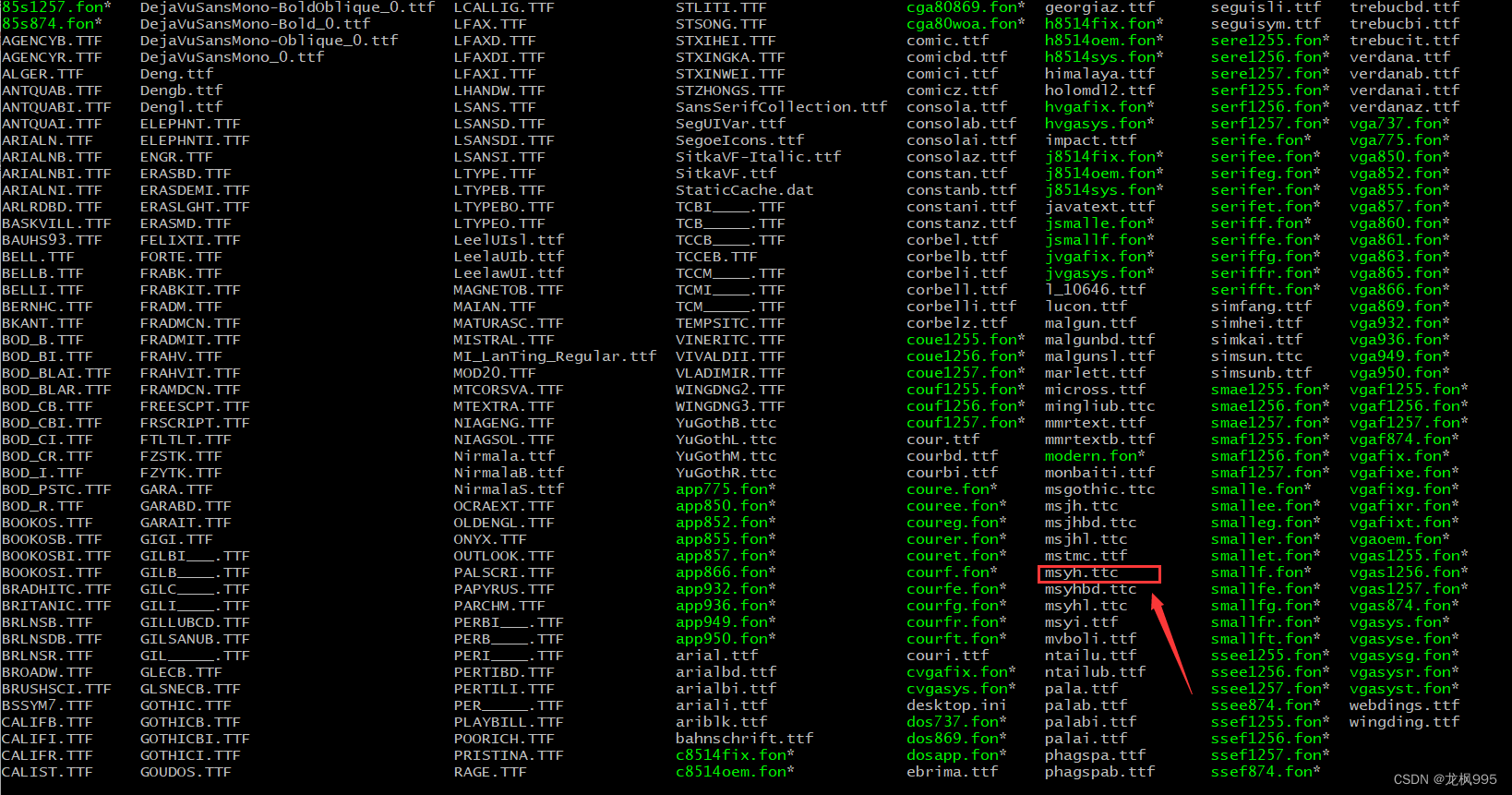
先说一下我当前的 场景 及 环境,这样同学们可以先评估本篇文章是否有帮助。 环境: dockerphp8.1-fpmwindows 场景: 来了个需求,有一个默认背景图,可以理解为背景图是一个 "相框",相框里面就会放…...

Vue.js与ASP.NET的结合,实现企业级应用的开发和部署
在当今快速发展的互联网技术领域,企业级应用的开发和部署变得越来越重要。Vue.js和ASP.NET是两个在前端和后端开发中广泛使用的技术,将它们结合起来可以为企业级应用的开发和部署带来诸多优势。本文将通过代码示例介绍如何使用Vue.js和ASP.NET进行企业级…...

Uncaught SyntaxError: ‘‘ string literal contains an unescaped line break
今天在修改前端页面的时候,页面报错了,提示了这个信息 Uncaught SyntaxError: string literal contains an unescaped line break 问题指向这行代码,这就是通过JS渲染一个easyui的搜索框,仔细确认之后,发现没有任何问…...
Vue3+Vite+TypeScript常用项目模块详解
目录 1.Vue3ViteTypeScript 概述 1.1 vue3 1.1.1 Vue3 概述 1.1.2 vue3的现状与发展趋势 1.2 Vite 1.2.1 现实问题 1.2 搭建vite项目 1.3 TypeScript 1.3.1 TypeScript 定义 1.3.2 TypeScript 基本数据类型 1.3.3 TypeScript语法简单介绍 2. 项目配置简单概述 2.…...

数字电路(一)
1、例题 1、进行DA数模转换器选型时,一般要选择主要参数有( A)、转换精度和转换速度。 A、分辨率 B、输出电流 C、输出电阻 D、模拟开关 2、下图所示电路的逻辑功能为( B) A、与门 B、或门 C、与非门 D、或非门 分析该…...

Oracle也有回收站
在数据库管理中,数据的删除是一个常见的操作。然而,有时候我们可能会意外地删除了一些重要的数据。幸运的是,Oracle数据库提供了一个类似于回收站的功能,可以帮助我们恢复被删除的数据。本文将介绍Oracle数据库中的回收站功能以及…...
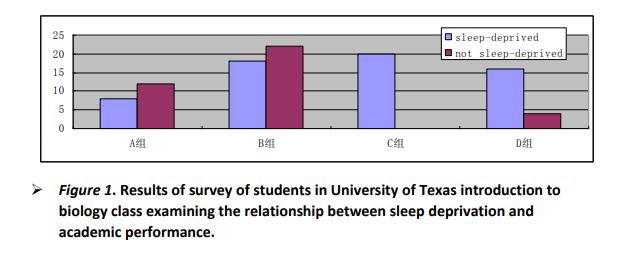
投稿注意!APA格式超全示例详解,原本28天能录用,可能要拖延2个月
为什么同一本期刊有论文28天录用,有论文10个月才录用?结合近期征稿的这本经管类SSCI期刊,小编(Unionpub学术)整理了部分影响录用的几个因素,准备提交此期刊的作者可自查参考下: (参…...
【Python】Web学习笔记_flask(1)——模拟登录
安装flask pip3 install flask 第一部分内容: 1、主页面输出hello world 2、根据不同用户名参数输出用户信息 3、模拟登录 from flask import Flask,url_for,redirectappFlask(__name__)app.route(/) def index():return hello worldapp.route(/user/<uname…...

css单行文本省略号多行文本省略号
设置单行文本省略号的写法 : 先设置宽固定的宽度 :width: 300px; 设置不换行 :white-space:nowrap; 设置省略号:text-overflow: ellipsis; 裁剪多余的内容/溢出的内容:overflow: hidden; width: 200px; white-space:…...
信号槽中的函数重载
信号槽中的函数重载 QT4的方式QT5的方式函数指针重载函数QT5信号函数重载解决方案 总结 QT4的方式 Qt4中声明槽函数必须要使用 slots 关键字, 不能省略。 信号函数: 槽函数: mainwondow: cpp文件: #include "mainwindow.h"…...
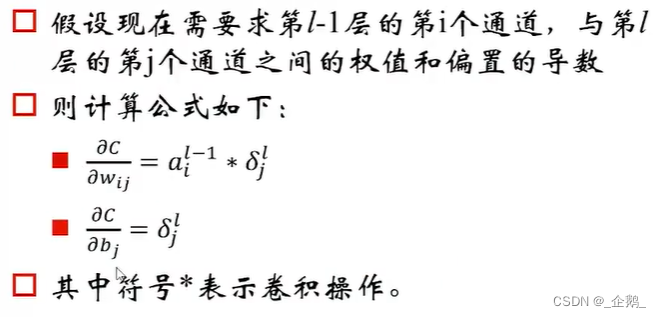
计算机视觉(五)深度学习基础
文章目录 深度学习基础卷积神经网络与传统神经网络区别深度学习与神经网络的区别 目标函数选择合适的目标函数Softmax层 改进的梯度下降梯度消失的直观解释激活函数学习步长SGD的问题Momentum动量Nesterov MomentumAdagradRMSpropAdam 各种梯度下降算法比较关于算法选择的建议B…...

ES6学习-Generator
Generator 种异步编程解决方案 函数会返回一个遍历器对象语法上:Generator 函数是一个状态机,封装了多个内部状态。形式上:Generator 函数是一个普通函数;有两个特征。一是,function关键字与函数名之间有一个星号;二是,函数体内部…...

Flowable-服务-微服务任务
目录 定义图形标记XML内容界面操作 定义 Sc 任务不是 BPMN 2.0 规范定义的官方任务,在 Flowable 中,Sc 任务是作为一种特殊的服务 任务来实现的,主要调用springcloud的微服务使用。 图形标记 由于 Sc 任务不是 BPMN 2.0 规范的“官方”任务…...

opencv03-补充-vector的操作
opencv03-补充-vector的操作 参考:https://www.runoob.com/w3cnote/cpp-vector-container-analysis.html 构造方法(具体介绍看API文档) class Student {public:private:string name;};int main() {vector<int>();vector<int> v1;vector<Student&g…...
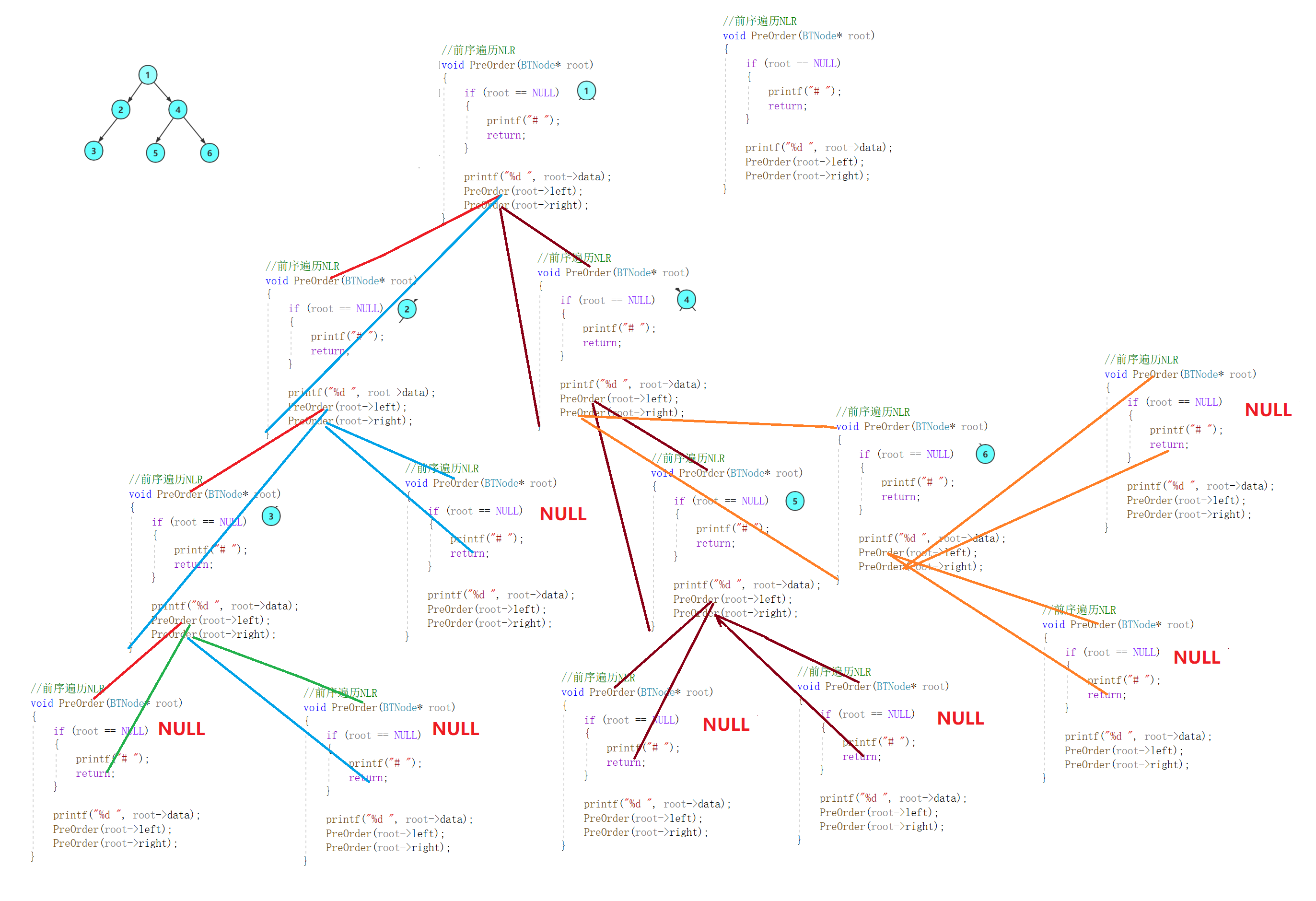
二叉树(C语言)
文章目录 1.树1.1概念1.2相关定义1.3 表示(左孩子右兄弟) 2.二叉树2.1概念2.2特殊的二叉树1. 满二叉树:2. 完全二叉树: 2.3二叉树的性质2.4练习 3.二叉树的存储结构1. 顺序存储2. 链式存储 4.完全二叉树的代码实现4.1堆的介绍1.堆…...
模块中的类forms.CharField)
介绍下Django中的表单(forms)模块中的类forms.CharField
在Django中,forms.CharField() 是用于定义表单字段的类,它属于 Django 的表单(forms)模块。CharField 是用于处理字符型数据的表单字段类。它允许用户在表单中输入文本数据,并对该数据进行验证和处理。 forms.CharFie…...

元宇宙与数字孪生的异同?
随着数字孪生和元宇宙两个概念的爆火,人们对这两个“异物”也越来越好奇,这都是什么意思?听起来都差不多,是一样的嘛?本文就用最简单的话语带大家了解一下二者之间的异同。 首先来说数字孪生和元宇宙的概念 数字孪生是…...

智慧农业:科技赋能农村发展
智慧农业发展前景灿烂多彩,正为农业带来新的转型升级。随着科技的不断发展,数字化、自动化和智能化技术逐渐渗透进农业领域,为农民提供了更多高效便捷的农业管理方式。智慧农业通过物联网、大数据、人工智能等先进技术,实现对农田…...
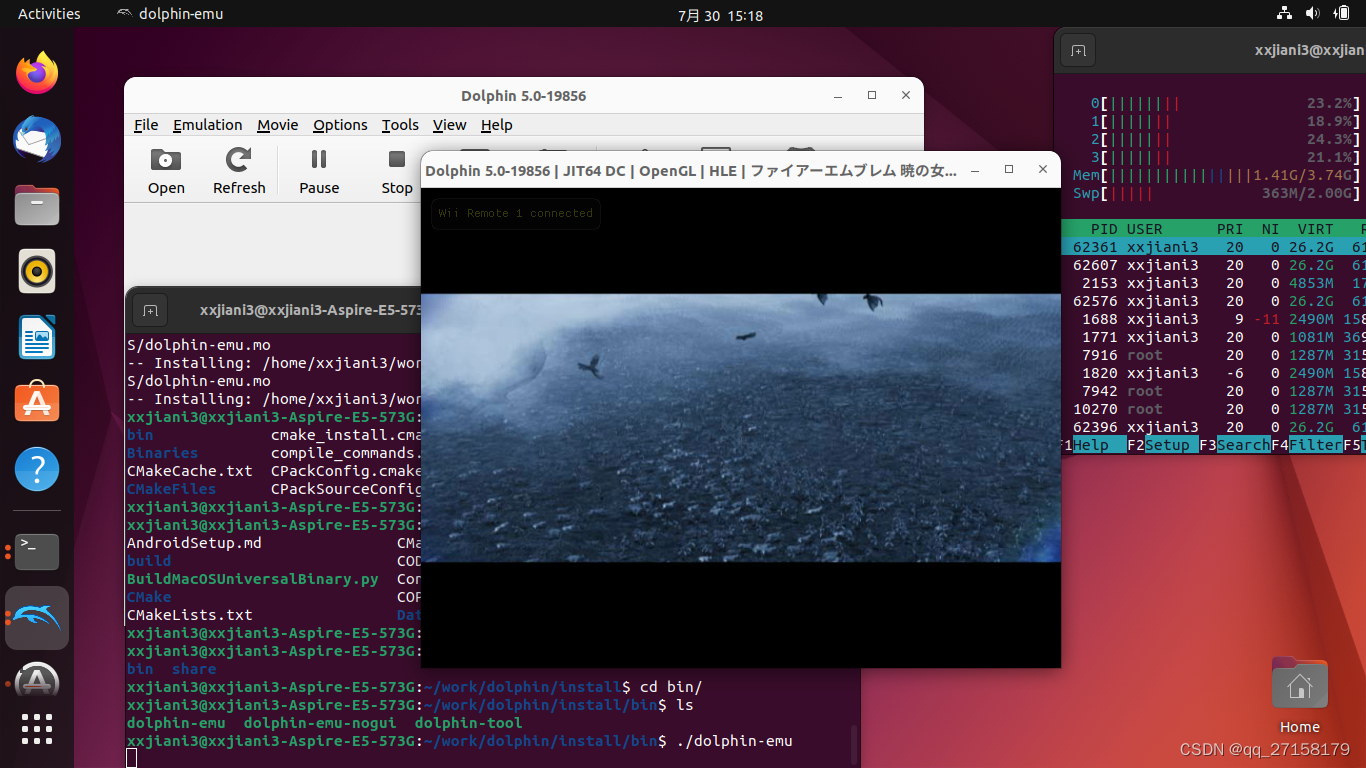
x86架构ubuntu22下运行WILL模拟器dophin
0. 环境 i5实体机ubuntu22 1. 安装依赖 $ sudo apt install build-essential git cmake ffmpeg libavcodec-dev libavformat-dev libavutil-dev libswscale-dev libevdev-dev libusb-1.0-0-dev libxrandr-dev libxi-dev libpangocairo-1.0-0 qt6-base-private-dev libblueto…...

2026年实测推荐:10款思维导图工具,开发者效率翻倍
作为技术博主,我常年用思维导图拆解需求、梳理架构、记录学习笔记。2026年,工具们卷出了新高度:AI辅助、白板一体化、实时协作成了标配。本文从开发者视角出发,实测了10款热门工具,帮你选出最适合的那把“瑞士军刀”。…...

Wormhole NFT Bridge 详解:跨链数字资产转移的完整方案
Wormhole NFT Bridge 详解:跨链数字资产转移的完整方案 【免费下载链接】wormhole A reference implementation for the Wormhole blockchain interoperability protocol. 项目地址: https://gitcode.com/gh_mirrors/wo/wormhole Wormhole NFT Bridge 是 Wor…...
)
出租车计价器控制电路的设计(有完整资料)
编号:CJ-32-2022-046设计简介:本设计是出租车计价器控制电路的设计,主要实现以下功能:1、出租车计价器系统以Km 为单位统计里程,以元为单位统计总金额; 2、通过霍尔传感器和电机获取速度和路程;…...

Android音视频应用开发中的性能与功耗优化策略
引言 随着移动设备的普及和5G网络的推进,Android音视频应用(如视频会议、直播平台)已成为日常生活和工作的重要组成部分。然而,这些应用往往面临性能瓶颈(如卡顿、延迟)和功耗过高(如电池快速耗尽)的问题。作为一名Android音视频应用开发工程师,掌握性能优化和功耗优…...

告别卡顿!Flowframes让普通视频秒变丝滑的AI插帧神器
告别卡顿!Flowframes让普通视频秒变丝滑的AI插帧神器 【免费下载链接】flowframes Flowframes Windows GUI for video interpolation using DAIN (NCNN) or RIFE (CUDA/NCNN) 项目地址: https://gitcode.com/gh_mirrors/fl/flowframes 你是否曾为观看动作电影…...

087、机器人运动学:雅可比矩阵
087、机器人运动学:雅可比矩阵 一、一个让我熬夜三天的调试故事 去年做六轴协作机器人末端力控的时候,遇到一个诡异的问题:机器人末端在某个位姿下,明明关节速度指令给得很平滑,末端速度却突然跳变,导致力控震荡。当时我盯着示波器上的速度曲线,百思不得其解——运动学…...

取号机嵌入式扫码模组选型与集成实战:以4500R为例破解复杂场景应用难题
1. 项目概述:取号机扫码模组的选型困境与破局在智慧政务大厅、银行网点、医院门诊这些我们日常办事的高频场景里,取号机早已不是新鲜事物。但不知道你有没有留意过,现在越来越多的取号机旁边,除了传统的按键和触摸屏,还…...

Prometheus外置抓取器:扩展监控能力与复杂场景适配方案
1. 项目概述:一个为Prometheus量身定制的“数据抓取器”如果你正在使用Prometheus监控你的微服务、Kubernetes集群或者任何需要被度量的系统,那你一定对scrape_configs这个配置项不陌生。Prometheus的核心工作模式就是“拉取”(Pullÿ…...
)
【限时技术白皮书】ElevenLabs尼泊尔文语音质量评估体系(含MOS打分标准、基线数据集、及与Google Cloud Text-to-Speech Nepali v1.3对比)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs尼泊尔文语音质量评估体系概述 ElevenLabs 对尼泊尔文(नेपाली)语音合成的支持虽属新兴能力,但其质量评估需兼顾语言学特性、声学保真度与文化适配性…...

LTC3305铅酸电池平衡器与PTC限流方案设计
1. LTC3305铅酸电池平衡器工作原理 LTC3305是Linear Technology(现属ADI)推出的一款专用于铅酸电池组的主动平衡控制器。其核心功能是通过一个辅助电池(AUX)在串联电池组间进行电荷转移,实现电压均衡。这种架构特别适合…...