Autosar通信入门系列05-聊聊一帧Can/CanFD报文发送时间?
本文框架
- 1. 概述
- 2. 一帧CAN报文发送时间计算
- 3. 一帧CanFD报文的传输时间计算
- 3.1 标准CAN与CANFD两者间的区别
- 3.2 CANFD报文传输时间计算
1. 概述
本篇我们一起看下一帧Can报文发送需要多长时间,下述文章里我们会首先计算下Can分别对应的字节数,再根据传播速率计算出一帧报文传输的时间,内容简单但还有点意思。本文大纲如下:
2. 一帧CAN报文发送时间计算
CAN及CANFD对应的标准帧及扩展帧的格式如下,其中CAN与CANFD的主要区别在于数据场的长度不同,标准帧与扩展帧的区别在于仲裁场长度不同。
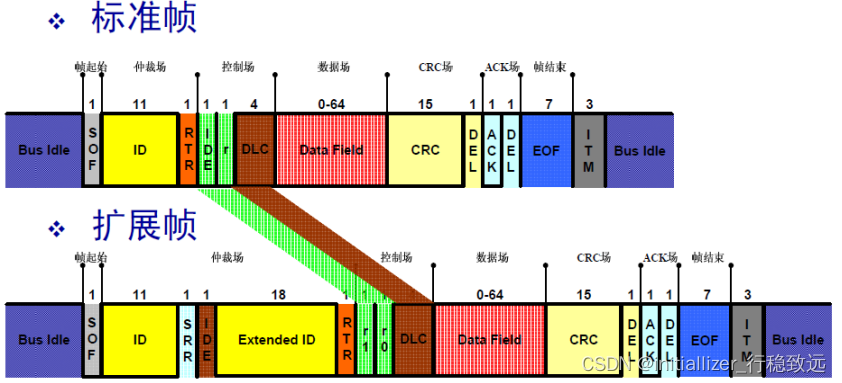
对于一帧8字节数据的标准CAN报文总共的Bit位数量:
帧起始(1位)+ 仲裁段(13位)+ 控制段(5位)+ 数据段(64位)+ CRC段(16位)+ ACK段(2位)+ 帧结束(7位)= 108位
对于数据8字节的扩展帧:
帧起始(1位)+ 仲裁段(33位)+ 控制段(5位)+ 数据段(64位)+ CRC段(16位)+ ACK段(2位)+ 帧结束(7位)= 128位
当对应CAN报文传输速率为500kBaud/s时,即传输一个Bit需要的时间为:1/500k = 2us/bit,对应上述的标准帧及扩展帧的传输时间:
标准帧:108 x 2 = 216us
扩展帧:128 x 2 = 256us
3. 一帧CanFD报文的传输时间计算
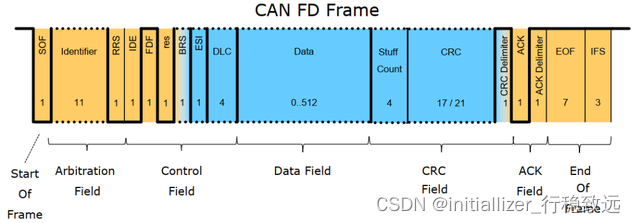
那对于一帧CanFD报文需要多长时间呢?同样需要先了解其数据格式,对于标准CANFD报文,其帧组成如下,
3.1 标准CAN与CANFD两者间的区别
与CAN 帧相同,CANFD报文同样有帧起始+ 仲裁段+ 控制段+ 数据段+ CRC段+ ACK段+ 帧结束,七个部分组成,两者区别在于:
-
传输速率不同:CAN FD的速率可变,从控制场中的BRS位到ACK场之前(含CRC分界符)为可变速率,最高速率可达到8Mbps,其他部分与CAN相同。
-
数据长度不同:CAN FD支持的最大数据长度为64byte,CAN支持的最大数据长度为8byte。
-
帧格式不同:CAN FD新增了FDF、BRS、ESI位,其中:
FDF 位(Flexible Data Rate Format):原 CAN 数据帧中的保留位 r,表示 CAN 报文还是 CAN-FD 报文,FDF 位常为隐性(1),表示 CAN FD 报文;
BRS 位( Bit Rate Switch):表示位速率转换,当 BRS 为显性位(0)时数据段的位速率与仲裁段的位速率一致(恒定速率),当 BRS 为隐性位(1)时速率可变(即 BSR 到 CRC 使用转换速率传输);
ESI 位(Error State Indicator):发送节点错误状态指示,主动错误时发送显性位(0),被动错误时发送隐性位(1)。 -
ID长度不同:CAN FD标准帧ID长度可扩展至12bit,CAN的标准帧ID为11bit。
3.2 CANFD报文传输时间计算
在计算一帧CANFD报文传输时间时,需要注意CANFD报文
由于CANFD采用了双波特率形式:标准波特率(也称仲裁域波特率)和数据域波特率,所以帧结构中不同段采用的波特率也不同。
仲裁域波特率所占位数:帧起始(1位)+ 仲裁段(13位)+ 控制段的EDL、r0、BRS(3位)+ ACK段(2位)+ 帧结束(7位),共26位。
数据域波特率所占位数:控制段的ESI、DLC(5位)+ 数据段(0~512位)+ CRC段(28/33位),最多共550位。
假设仲裁域波特率为500Kbps(位时间2us),数据域波特率为2Mbps(位时间0.5us)
则发送一帧标准CANFD报文需要的时间为:26 x 2us+550 x 0.5us = 52 + 275 = 327us
注此处计算的前提条件如下:
1)CANFD报文为标准CANFD报文,非扩展帧;
2)上述报文位数中,不含填充位个数,在CAN/CAN FD协议中规定:每5个相同的位就必须填充一个相反位,该位即为填充位。例如发送的帧ID为0x55或0xAA,其二进制分别为0101 0101或1010 1010,即每个位与前后位均相反,若此时ID和数据均为0x55或0xAA,则可以使填充位个数最少。
相关文章:
Autosar通信入门系列05-聊聊一帧Can/CanFD报文发送时间?
本文框架 1. 概述2. 一帧CAN报文发送时间计算3. 一帧CanFD报文的传输时间计算3.1 标准CAN与CANFD两者间的区别3.2 CANFD报文传输时间计算 1. 概述 本篇我们一起看下一帧Can报文发送需要多长时间,下述文章里我们会首先计算下Can分别对应的字节数,再根据传…...
【phaser微信抖音小游戏开发002】hello world!
执行效果: 将以下代码文本内容,放入到game.js中即可。目录结构如下图 import ./js/libs/weapp-adapter import ./js/libs/symbolGameGlobal.window.scrollTo () > { };//防止真机出错 import Phaser from ./js/phaser//引入Phaservar {windowWidth, …...
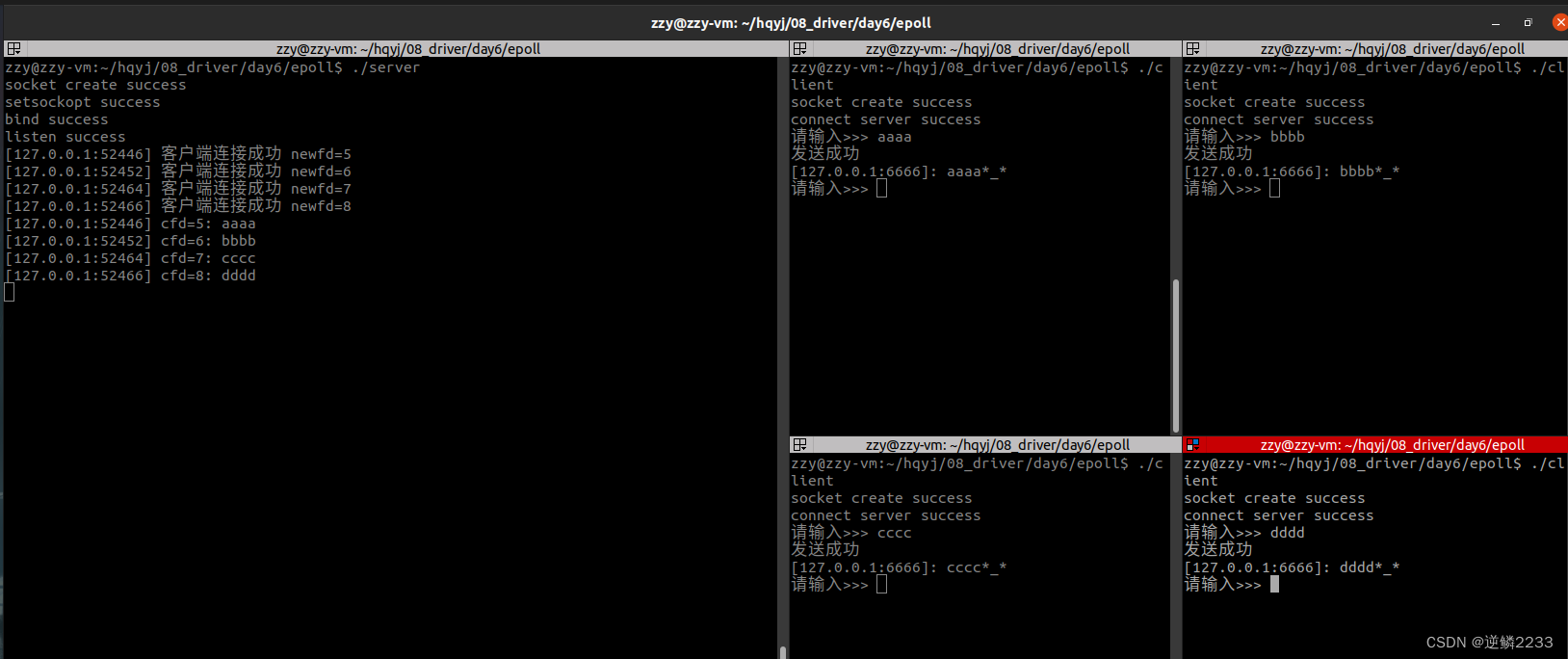
2023.07.29 驱动开发DAY6
通过epoll实现一个并发服务器 服务器 #include <stdio.h> #include <string.h> #include <unistd.h> #include <sys/types.h> #include <sys/socket.h> #include <netinet/in.h> #include <arpa/inet.h> #include <sys/epoll.h…...
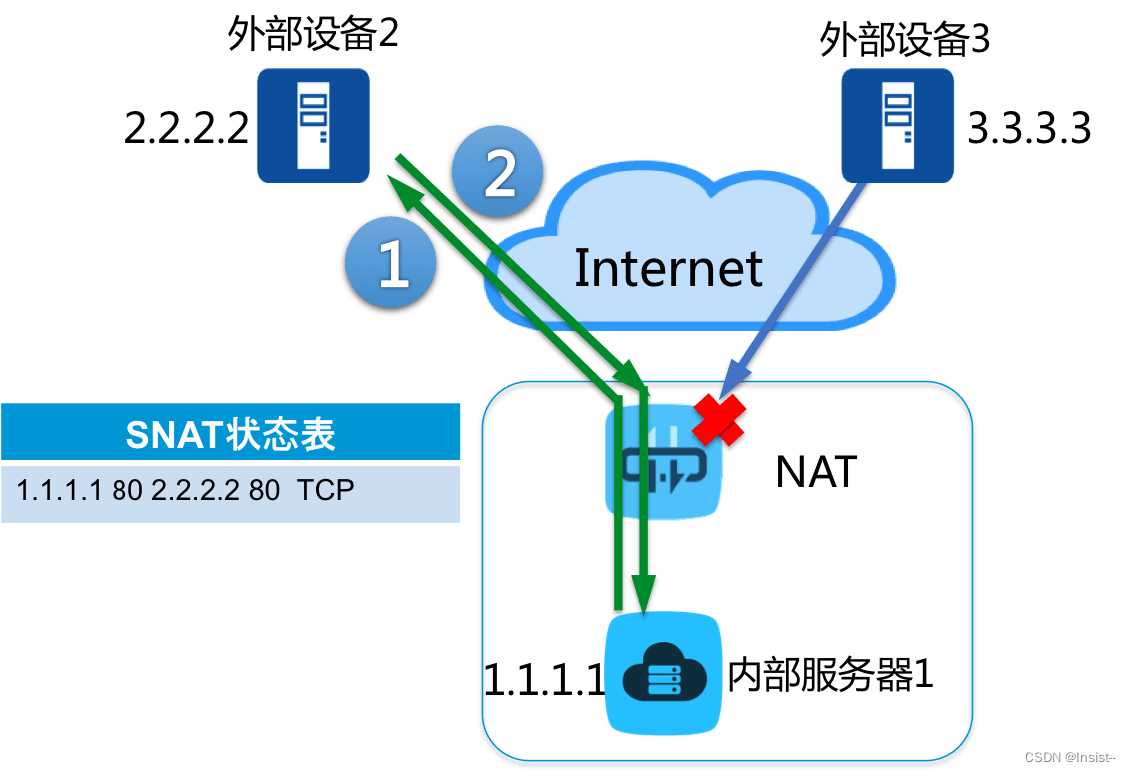
网工必须掌握的5种组网技术,你会了吗?
作者:Insist-- 个人主页:insist--个人主页 作者会持续更新网络知识和python基础知识,期待你的关注 目录 一、VLAN技术 1、VLAN是什么? 2、VLAN的作用 ①提高网络安全性 ②提高了网络的灵活性性 ③增强了网络的健壮性 二、D…...

webpack中文文档
基本安装 首先我们创建一个目录,初始化 npm,然后 在本地安装 webpack,接着安装 webpack-cli(此工具用于在命令行中运行 webpack): mkdir webpack-demo cd webpack-demo npm init -y npm install webpack …...

【Linux指令篇】--- Linux常用指令汇总(克服指令繁杂问题)
文章目录 前言🌟一、Linux基本指令🌟二、ls指令🌏2.1.语法:🌏2.2.功能:🌏2.3.常用选项: 🌟三、pwd指令🌏3.1.语法:🌏3.2.功能…...

硬盘的分类
目前常见的硬盘种类主要有以下2种: 机械硬盘(HDD) 机械硬盘(HDD)是一种利用旋转磁盘和读写头来存储和访问数据的存储设备。它由磁盘、读写头、电机和控制电路等组成,磁盘通常是一种铝合金或玻璃材质的圆盘&…...

el-upload批量手动上传,并用form表单校验上传文件
手动上传设置:auto-upload"false" <el-formref"formData"class"formWidth":model"formData"label-width"120px":rules"rules"><el-form-itemlabel"数据"class"uploadClass"required…...

牛客网Verilog刷题——VL52
牛客网Verilog刷题——VL52 题目答案 题目 请编写一个十进制计数器模块,当mode信号为1,计数器输出信号递增,当mode信号为0,计数器输出信号递减。每次到达0,给出指示信号zero。模块的接口信号图如下: 模块的…...

4-7月预测价差方向准确率统计
月度 预测价差方向准确率 4月 33.6% 5月 28.4% 6月 25.7% 7月 34.2% 4-7月合计 30.6% 准确率计算公式: 其中, D:价差方向预测值(1:实时>日前,0:实时日前,-1:实时<日前&#x…...
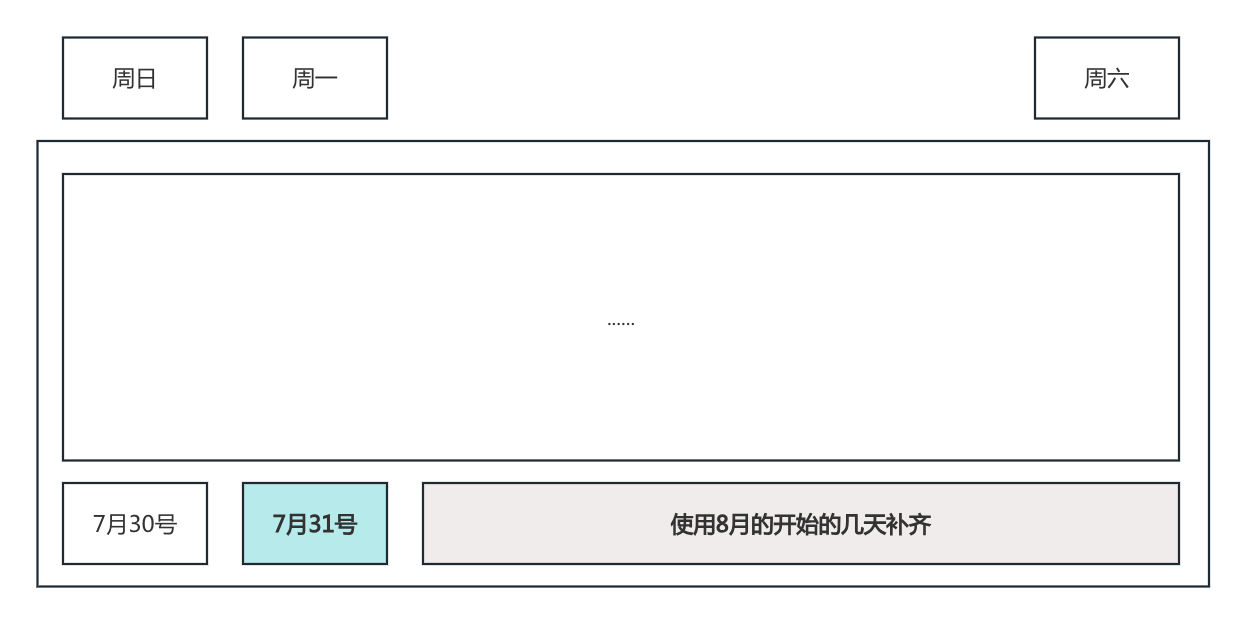
《Vue3+Typescript》一个简单的日历组件实现
这是一个没有套路的前端博主,热衷各种前端向的骚操作,经常想到哪就写到哪,如果有感兴趣的技术和前端效果可以留言~博主看到后会去代替大家踩坑的~ 主页: oliver尹的主页 格言: 跌倒了爬起来就好~ 目录 一、…...

第一章 修学旅行
前言 翻了翻文章回收站,好怀念靖和阳的故事啊(航和颜:还有我们别忘啦) 不知道还有没有人记得以前的故事呢…… 那么,我就开始写啦。这是关于密码学的一篇文章,一共2696字:D(累死我…...
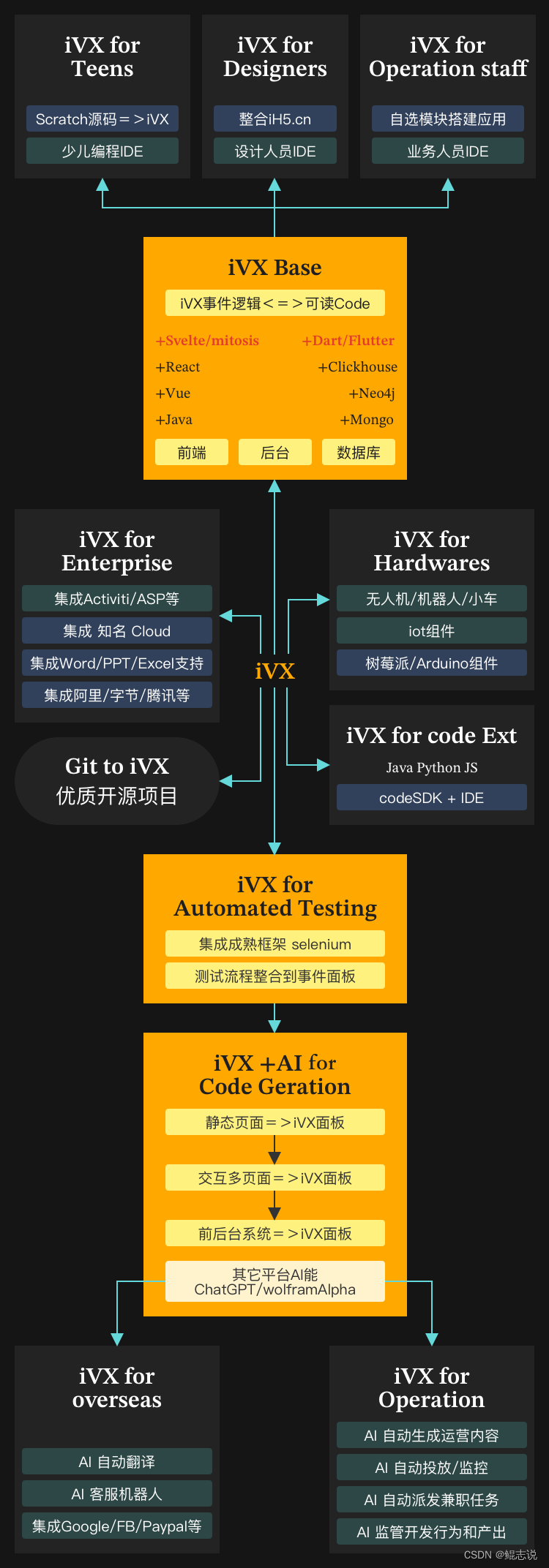
如果你也能认识并使用这个低代码平台,那真的是泰酷辣——iVX低代码平台
低代码技术起源是比较悠久的了,尤其是在近些年,随着技术的演进,低代码平台逐渐成为热门趋势。这些平台通过简化应用程序开发流程,减少手动编码,使非专业开发人员也能快速构建复杂应用。为我们的敏捷开发和高效生产贡献…...

uC-OS2 V2.93 STM32L476 移植:系统移植篇
前言 上一篇已经 通过 STM32CubeMX 搭建了 NUCLEO-L476RG STM32L476RG 的 裸机工程,并且下载了 uC-OS2 V2.93 的源码,接下来,开始系统移植 开发环境 win10 64位 Keil uVision5,MDK V5.36 uC-OS2 V2.93 开发板:NUC…...
gitee修改代码提交操作步骤说明
一,简介 本文主要介绍如何从gitee仓库下载文件,本地修改,本地提交,然后再push到远程服务器的操作步骤。供参考,欢迎一起讨论交流~ 二,操作步骤 总的操作步骤分为以下几步 1,远程服务器下载文…...
物联网|可变参数的使用技巧|不一样的点灯实验|访问外设的寄存器|操作寄存器实现点灯|硬件编程的基本流程-学习笔记(11)
文章目录 可变参数的使用技巧第三阶段-初级实验Lesson5:不一样的点灯实验---学习I/O的输出 ☆点灯的电路图分析1 一起看看点灯的电路图Tip1:另一种点灯的电路Tip1:如何访问外设的寄存器2 STM32F407中操作GPIO的方法 通过直接操作寄存器实现点灯实验Tip1:硬件编程的基本流程 2代…...
30. 利用linprog 解决 生产决策问题(matlab程序)
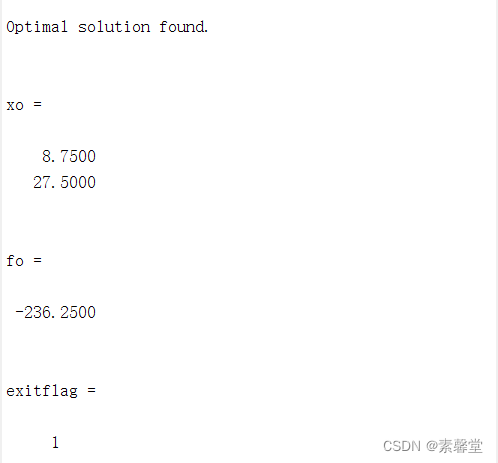
1.简述 线线规划的几个基本性质:【文献[1]第46页】 (1)线性规划问题的可行域如果非空,则是一个凸集-凸多面体; (2)如果线性规划问题有最优解,那么最优解可在可行域的顶点中确定; (3)如果可行域有界,且可行域…...
一百三十九、Kettle——Linux安装Kettle8.2
一、目的 为了方便海豚调度kettle任务,在Linux上安装kettle 二、kettle版本与前提 版本:kettle8.2 pdi-ce-8.2.0.0-342 前提:Linux已经安装好jdk 三、安装步骤 (一)打开安装包所在地 [roothurys22 ~]# cd …...

react路由在layout中的监听
业务中需要在layout里来监听路由的变化,但是layout并不是一个路由组件,所以layout组件内的props并没有location,history等属性,(路由组件:由Route组件处理的才是路由组件)所以我们需要将layout组件转变成路…...
Java反射(三)
目录 1.反射与代理设计模式 2.反射与Annotation 3.自定义Annotation 4.Annotation整合工厂设计模式和代理设计模式 1.反射与代理设计模式 代理模式是指通过业务真实类实现业务接口,再通过设置代理类创建业务真实类子类从而间接访问业务真实类。但是这存在一个弊…...
)
ArcSWAT模型结果可视化:用MATLAB一键绘制专业级降水-径流过程图(附完整代码)
ArcSWAT模型结果可视化:用MATLAB一键绘制专业级降水-径流过程图(附完整代码) 水文模型的后处理环节往往决定着研究成果的呈现质量。当我们在ArcSWAT中完成复杂的流域划分、参数率定和径流模拟后,如何将海量的数据输出转化为直观、…...
)
从场景到代码:如何用研华Navigator为PCIE1751规划数据采集方案(AI/AO/DI/DO全解析)
从场景到代码:如何用研华Navigator为PCIE1751规划数据采集方案(AI/AO/DI/DO全解析) 在工业自动化领域,数据采集系统的设计往往面临一个核心矛盾:硬件性能的丰富性与实际需求的精准匹配。研华PCIE-1751作为一款多功能数…...

Delphi二进制迷宫破解:IDR交互式重构器的逆向工程革命
Delphi二进制迷宫破解:IDR交互式重构器的逆向工程革命 【免费下载链接】IDR Interactive Delphi Reconstructor 项目地址: https://gitcode.com/gh_mirrors/id/IDR 在逆向工程的世界里,Delphi编译的程序犹如一座座精心设计的迷宫——结构复杂、入…...

API 监控告警系统
LogMonitor - API监控告警系统 基于Python的智能API监控系统,集成Splunk日志分析和钉钉告警,支持多种API类型的实时监控和趋势分析。 代码地址 https://github.com/junbingliu007/log_monitor 功能特性 多API类型监控:支持多种API类型智…...

手把手教你复现CVE-2022-25578:利用.htaccess文件上传绕过,在Taocms 3.0.2靶场拿Flag
从零实战复现CVE-2022-25578:Taocms 3.0.2靶场渗透全解析 在网络安全领域,文件上传漏洞一直是渗透测试中的经典突破口。今天我们将深入剖析CVE-2022-25578漏洞,这是一个基于.htaccess文件配置不当导致的安全问题。不同于简单的漏洞复现教程&a…...

程序员职业生涯系列:关于技术能力的思考与总结
工作几十年,我面试过几百个程序员,带过十几个团队,自己也从一个写CRUD都费劲的菜鸟成长为架构师。回头看,最让我困惑过的一个问题是:什么才是真正的技术能力? 是LeetCode刷到300题?是把某个框架源码啃得烂熟?是写过多少个高并发项目?还是那张挂在墙上的高级职称证书?…...

避坑指南:在ArcGIS中提取DEM高程点,为什么导入Global Mapper后看不到高度?
避坑指南:ArcGIS与Global Mapper高程数据互操作的核心陷阱与解决方案 当你第一次将精心处理的DEM高程点从ArcGIS导入Global Mapper,期待看到起伏有致的三维地形时,却发现所有点都"躺平"在二维平面上——这种挫败感我深有体会。这不…...
-5月20日-第三题- 敏感实体动态遮蔽掩码】(题目+思路+JavaC++Python解析+在线测试))
【2026年华为暑期实习(AI)-5月20日-第三题- 敏感实体动态遮蔽掩码】(题目+思路+JavaC++Python解析+在线测试)
题目内容 为了防止大语言模型记忆并泄露输入上下文的敏感数据,安全框架会对输入的长文本进行预扫描,匹配预设的敏感词库(如 API_KEYAPI\_KEYAPI_KEY、身份证号码等)。...

3分钟掌握Shutter Encoder:免费开源的终极视频转换工具解决方案
3分钟掌握Shutter Encoder:免费开源的终极视频转换工具解决方案 【免费下载链接】shutter-encoder A professional video compression tool accessible to all, mostly based on FFmpeg. 项目地址: https://gitcode.com/gh_mirrors/sh/shutter-encoder 还在为…...

Taotoken API密钥管理与访问控制功能初体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken API密钥管理与访问控制功能初体验 1. 引言 在将大模型能力集成到实际应用或团队协作流程中时,API密钥的管理…...