ubuntu20.04配置UR机械臂的仿真环境
ubuntu20.04配置UR机械臂的仿真环境
参考链接
1. 首先安装好ROS
ubuntu20.04安装Noetic版本的ros,具体安装可见之前写的博客
2. 配置UR机械臂仿真工具包
- 找一个你喜欢的地方创建ros工作空间(也就是找个文件夹放ros的包,然后编译运行)
例如在根目录创建catkin_ws文件夹,并创建src子文件夹,然后catkin_make编译一下
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
在运行catkin_make后报错
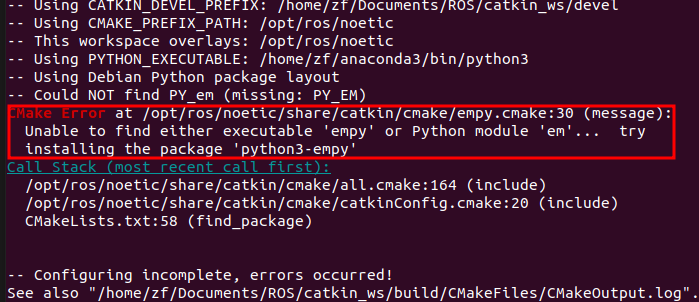
这是因为catkin找的python版本为anaconda下面的版本,所以需要改为指定采用下面的命令,参考之前的博客
catkin_make -DPYTHON_EXECUTABLE=/usr/bin/python3
之后要source一下,才能读取到工作空间里的文件,以后每次打开终端进入工作空间都要执行该命令
source devel/setup.bash
- 进入catkin_ws目录下,下载UR机械臂相关工具包到src文件夹中
cd ~/catkin_ws/#clone the driver
git clone https://github.com/UniversalRobots/Universal_Robots_ROS_Driver.git src/Universal_Robots_ROS_Driver#clone fork of the description.
git clone https://github.com/ros-industrial/universal_robot.git src/universal_robotrosdep update #如果之前在安装ros时候已经做了这步那就不用重复了
rosdep install --from-paths src --ignore-src -y catkin_make #开始编译,这次不用加上面的指定路径了
之后要source一下,才能读取到工作空间里的文件,以后每次打开终端进入工作空间都要执行该命令
source devel/setup.bash
在运行上面的命令时遇到问题,运行rosdep update时,一直不成功,解决办法可以看我之前写的博客
3. Rviz和Gazebo仿真环境用moveit路径规划同步运动
接着上面的命令行窗口继续运行
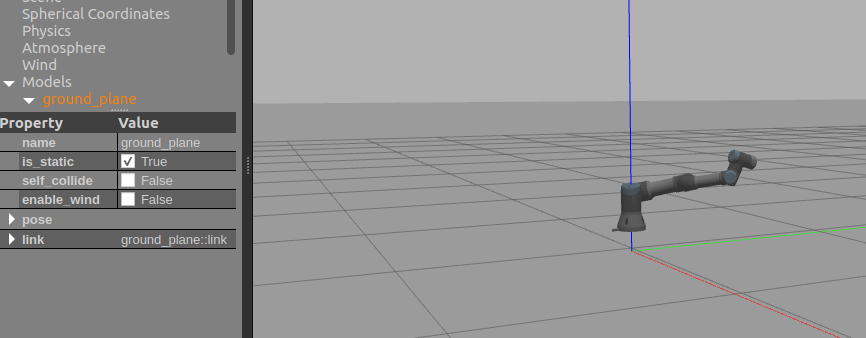
# 启动gazebo仿真环境
roslaunch ur_gazebo ur3_bringup.launch
# 如果gazebo报错,可能是之前的没有完全关闭,需要执行killall gzserver
可以在Gazebo看到ur3的仿真模型
新开两个命令行,并在catkin_ws目录下,先source devel/setup.bash一下,分别在两个命令行窗口运行下面两行命令
# 在仿真中进行路径规划
roslaunch ur3_moveit_config moveit_planning_execution.launch sim:=true
roslaunch ur3_moveit_config moveit_rviz.launch
此时会打开rviz,可以看到ur3的仿真模型
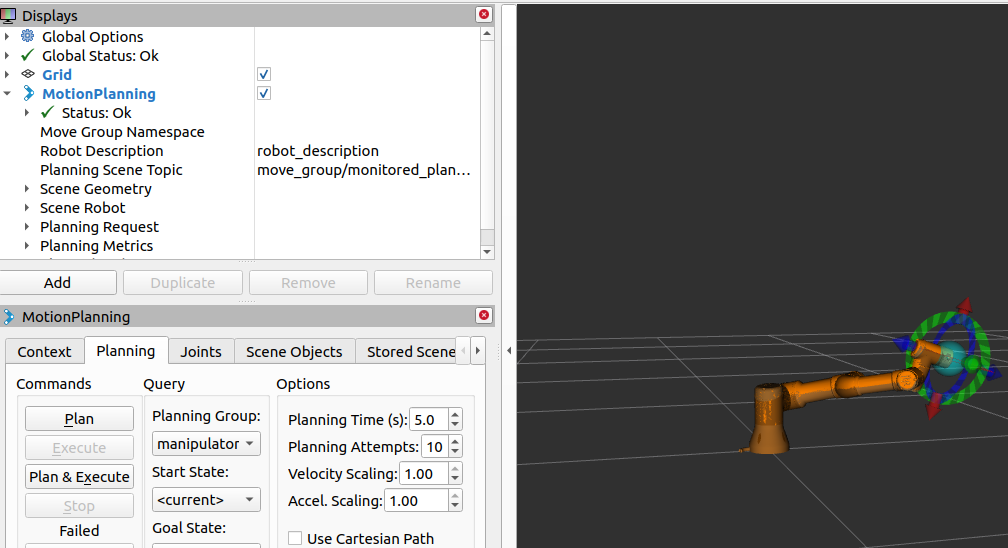
gazebo和rviz中的机械臂的位姿是一样的,要实现同步控制,可以拖动rviz中的球移动到指定位置,点击plan观察路径规划,点击execute执行该路径规划,可以在gazebo和rviz中同步看到刚刚的路径规划运动,实现了简单的机械臂仿真环境搭建
相关文章:
ubuntu20.04配置UR机械臂的仿真环境
ubuntu20.04配置UR机械臂的仿真环境 参考链接 1. 首先安装好ROS ubuntu20.04安装Noetic版本的ros,具体安装可见之前写的博客 2. 配置UR机械臂仿真工具包 找一个你喜欢的地方创建ros工作空间(也就是找个文件夹放ros的包,然后编译运行&…...

雅利安人覆灭了世界三大文明,为何单单在商朝被斩首两万?
转自:雅利安人覆灭了世界三大文明,为何单单在商朝被斩首两万? (baidu.com)在公元前3000年至1000年的广大时间内,是世界四大文明古国大放光彩的时候,古印度文明、古巴比伦文明、古埃及文明以及我们的古华夏,…...

Windows 系统上查询 GPU / CPU 对 Vulkan 的支持信息
Windows 系统上查询 GPU / CPU 对 Vulkan 的支持信息1. TechPowerUp GPU-Z https://www.techpowerup.com/gpuz/ GPU-Z is a lightweight system utility designed to provide vital information about your video card and graphics processor. GPU-Z 是一款显卡识别工具&…...

python3 字节与数字、字符等互转的方法。int、struct库等方法
文章目录int 与 bytes转换int 转 bytesbytes 转 intstr 与 bytes互转其他格式转字节格式说明转字节字节转其他字节在存储的时候根据存储的格式不同,可能会有大端小端之分,如果是数字,还有有符号无符号的区分,所以在自己处理的时候…...

人脸检测的5种方式
文章内容: 1)人脸检测的5种方法 1. Haar cascade opencv 2. HOG Dlib 3. CNN Dlib 4. SSD 5. MTCNN 一。人脸检测的5种方法实现 1. Haar cascade opencv Haar是专门用来检测边缘特征的。基本流程如下: 第1步,读取图片 img …...
)
华为OD机试 - 乘积最大值(Python)
乘积最大值 题目 给定一个元素类型为小写字符串的数组 请计算两个没有相同字符的元素长度乘积的最大值 如果没有符合条件的两个元素返回0 输入 输入为一个半角逗号分割的小写字符串数组 2 <= 数组长度 <= 100 0 < 字符串长度 <= 50 输出 两个没有相同字符的元…...
【CMU15-445数据库】bustub Project #2:B+ Tree(上)
(最近两个月学校项目有亿点忙,鸽得有点久,先来把 Project 2 补上) 本节实验文档地址:Project #2 - BTree Project 2 要实现的是数据结构课上都会讲的一个经典结构 B 树,但是相信大多数的同学(…...

功率放大器在lamb波方向算法的损伤定位中的应用
实验名称:基于PZT结Lamb波方向算法的损伤定位方法研究方向:损伤定位测试目的:Lamb波是在具有自由边界的固体板或层状结构中传输的一种弹性导波,由于其本身的传播特性,如沿传播路径衰减小,能量损失小&#x…...

时的科技迎1亿融资,这辆“空中的士”能否实现真正飞行?
近期,进行载人eVTOL的研发、生产和销售的时的科技宣布完成1亿元Pre-A轮融资,成立不到两年,这已是时的科技的第三轮融资,此前,时的科技已获得蓝驰创投和德迅投资千万美元种子轮投资。在不少人看来,时的科技所…...

idea 折叠代码块技巧 关于<editor-fold>
最近在使用delombok插件的时候,发现了一个有意思的小技巧 以前用VSstudio写代码的时候。经常使用代码块折叠的方法。但是在写java的时候,没怎么使用过 VSStudio中的写法 即 #region xxx ... your great coding #endregion这样在浏览的时候,…...
python|第五章考试题及练习题
本篇文章是对北京理工大学嵩天老师的《Python语言程序设计》第五章考试题及练习题的学习记录。 一、考试题 1、随机密码生成 问题描述: 描述 补充编程模板中代码,完成如下功能:…...

DIY生日蛋糕笔记
自制6寸生日蛋糕笔记 实验环境: 长帝CRTF32PD搪瓷烤箱32升, 九阳电动打蛋器, 裱花盘一套 蛋糕盒子 称重器 硅胶刀 两个大碗1号和2号。 材料: 参考: https://www.bilibili.com/video/BV1t34y1Z7mL/?spm_id_from333…...
)
MybatisPlus------常用注解和逻辑删除以及设置统一前缀以及主键生成策略(六)
MybatisPlus------常用注解以及设置统一前缀以及主键生成策略(六) 在使用MybatisPlus的过程中时,实力类的Mapper继承BaseMapper,此时不要添加TableName注解也能够对表数据实现增删改查。 // mybatispuls 提供了接口实现单表的增…...

JQuery工具框架
JQuery工具框架 直接使用js编程比较麻烦,而且还必须考虑浏览器的差异性。 为了简化javascript的开发,一些javascript库诞生了。当今流行的javascript库有:jQuery诞生于2005 年,Dojo、 EXT_JS、DWR、YUI… jQuery是John Resig在…...

同一个整型常量怎样在不同进制间之间转换?
整型常量可以分别用二进制、八进制、十进制和十六进制表示,不同的进制并不影响数据本身的大小,同一个整型常量可以在不同进制之间转换,具体转换方式如下。1.十进制和二进制之间的转换(1)十进制转二进制。十进制转换成二进制就是一个除以2取余…...
UVa 225 Golygons 黄金图形 暴力搜索 剪枝 状态判断
题目链接:Golygons 题目描述: 给定nnn和kkk个障碍物的坐标,你需要走nnn次,第一次走一个单位距离,第二次走二个单位距离,…,第nnn次走nnn个单位距离。走得过程中不能穿过或者到达障碍物所在的点&…...

PowerShell中的对象是神马?
在PowerShell中,无处不在体现出一个概念,这个概念是什么呢?就是对象,对象是面向对象的语言中非常重要的概念,PowerShell的底层是.net,也是面向对象的语言,因此它也继承了面向对象的语言的语法特性。但是很多人在使用PowerShell 语言的时候会觉得有些疑惑,到底什么是Pow…...
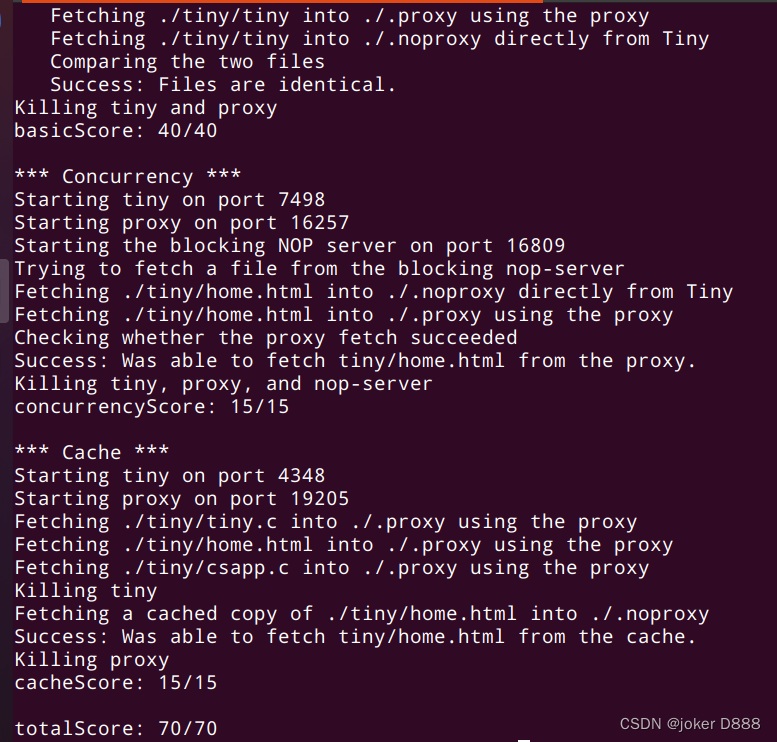
Proxy lab
CSAPP Proxy Lab 本实验需要实现一个web代理服务器,实现逐步从迭代到并发,到最终的具有缓存功能的并发代理服务器。 Web 代理是充当 Web 浏览器和终端服务器之间的中间人的程序。浏览器不是直接联系终端服务器获取网页,而是联系代理&#x…...
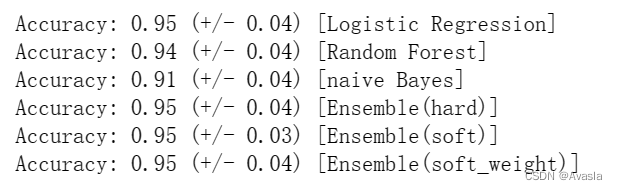
【机器学习】Sklearn 集成学习-投票分类器(VoteClassifier)
前言 在【机器学习】集成学习基础概念介绍中有提到过,集成学习的结合策略包括: 平均法、投票法和学习法。sklearn.ensemble库中的包含投票分类器(Voting Classifier) 和投票回归器(Voting Regressor),分别对回归任务和分类任务的…...

Day892.MySql读写分离过期读问题 -MySQL实战
MySql读写分离过期读问题 Hi,我是阿昌,今天学习记录的是关于MySql读写分离过期读问题的内容。 一主多从架构的应用场景:读写分离,以及怎么处理主备延迟导致的读写分离问题。 一主多从的结构,其实就是读写分离的基本…...
)
Azure VM SSH被锁死?别慌,用Serial Console这招救活你的服务器(亲测有效)
Azure VM SSH被锁死?Serial Console终极救援指南 当你在Azure VM上误操作sshd_config导致SSH被完全锁死时,那种绝望感就像被困在数字孤岛。常规的RDP、Bastion甚至重建VM都无济于事——直到发现Serial Console这个隐藏的救命通道。作为经历过同样噩梦的运…...

基于AI与贝叶斯学习的开源LinkedIn自动化销售探索代理部署指南
1. 项目概述:一个能自己找客户的AI销售代理如果你在B2B销售、市场拓展或者创业,你一定对LinkedIn又爱又恨。爱的是,它几乎是全球最精准的B2B客户数据库;恨的是,手动寻找、筛选、联系潜在客户,是一个极其耗时…...

从遥感图像到文字识别:手把手教你用旋转目标检测搞定那些‘歪着’的目标
旋转目标检测实战:从遥感图像到倾斜文本的高效解决方案 在计算机视觉领域,目标检测技术已经取得了长足进步,但传统水平边界框检测方法在面对旋转目标时往往表现不佳。无论是遥感图像中的飞机、船舶,还是自然场景中倾斜的文本&…...

免费Windows桌面分区工具NoFences:3分钟打造高效工作空间
免费Windows桌面分区工具NoFences:3分钟打造高效工作空间 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 还在为杂乱无章的Windows桌面而烦恼吗?NoFen…...

Windows更新修复终极指南:Script-Reset-Windows-Update-Tool完全解析
Windows更新修复终极指南:Script-Reset-Windows-Update-Tool完全解析 【免费下载链接】Script-Reset-Windows-Update-Tool This script reset the Windows Update Components. 项目地址: https://gitcode.com/gh_mirrors/sc/Script-Reset-Windows-Update-Tool …...

如何通过Python快速接入Taotoken并调用多模型API完成文本生成任务
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 如何通过Python快速接入Taotoken并调用多模型API完成文本生成任务 1. 准备工作:获取API Key与模型ID 在开始编写代码之…...
)
Hydrin 1 ([Arg8, Gly10, Lys11, Arg12]-Vasotocin)
一、基础信息多肽名称:Hydrin 1,加压催产素变体 [Arg8, Gly10, Lys11, Arg12]-Vasotocin 三字母序列:Cys-Tyr-Ile-Gln-Asn-Cys-Pro-Arg-Gly-Gly-Lys-Arg 单字母序列:CYIQNCPRG GKR 氨基酸数目:12 aa 结构特征ÿ…...

从AWE Designer到独立声卡:awb二进制文件固化Flash的实战解析
1. 从AWE Designer到独立声卡的核心逻辑 第一次接触AWE Designer的朋友可能会疑惑:为什么要把算法从PC端搬到开发板?简单来说,这就好比把厨师做好的预制菜打包成罐头——让美味脱离厨房环境也能随时享用。AWE Designer原本需要依赖电脑实时运…...

ARM架构TLB失效指令VALE1IS/VALE1ISNXS详解
1. ARM TLB失效指令基础解析在ARMv8/v9架构中,TLB(Translation Lookaside Buffer)作为内存管理单元(MMU)的核心组件,缓存了虚拟地址到物理地址的转换结果。当操作系统修改页表后,必须通过TLB失效…...

Attu:向量数据库可视化管理工具的终极指南
Attu:向量数据库可视化管理工具的终极指南 【免费下载链接】attu The Best GUI for Milvus 项目地址: https://gitcode.com/gh_mirrors/at/attu 还在为复杂的向量数据库命令行操作而烦恼吗?Attu作为Milvus向量数据库的官方图形化管理工具…...